DOI: 10.11817/j.issn.1672-7207.2017.04.021
小型四旋翼飞行器的滑模控制
王辰璐1, 2,陈增强1, 2,孙明玮1, 2
(1. 南开大学 计算机与控制工程学院,天津,300350;
2. 天津市智能机器人技术重点实验室,天津,300350)
摘要:针对1种六自由度四旋翼模型,设计滑模控制器来提高控制系统的鲁棒性。首先将四旋翼模型划分为全驱动和欠驱动2部分,全驱动子系统由高度和偏航角2个独立回路组成,而欠驱动子系统则包含4个被控量和2个控制量。然后针对全驱动系统的2个回路设计了基于反步法(Backstepping)的滑模控制,并进一步推导出有限时间终端滑模控制器。将欠驱动子系统写成一种级联标准型,并给出一种欠驱动级联形式的滑模控制器。采用Lyapunov稳定性理论证明所设计的滑模控制系统的稳定性。研究结果表明:所提出的四旋翼控制器是有效的,它不仅具有良好的鲁棒性和快速跟踪动态性能,而且能够有效地抑制抖振现象。
关键词:四旋翼飞行器;欠驱动系统;滑模控制;终端滑模控制;反步法
中图分类号:TP272 文献标志码:A 文章编号:1672-7207(2017)04-1006-06
Sliding mode control of a quadrotor helicopter
WANG Chenlu1, 2, CHEN Zengqiang1, 2, SUN Mingwei1, 2
(1. College of Computer and Control Engineering, Nankai University, Tianjin 300350, China;
2. Tianjin Key Laboratory of Intelligent Robotics, Tianjin 300350, China)
Abstract: A sliding mode control scheme was proposed for a 6 degree of free quadrotor model to improve the robustness of the quadrotor control system. Firstly, the quadrotor model was divided into two parts which included a fully-actuated subsystem and an under-actuated subsystem. The fully-actuated subsystem was composed of two independent loops with altitude and yaw angle, while the under-actuated subsystem had four state variables and two control variables. Secondly, a backstepping based on sliding mode controller and furthermore a finite time terminal sliding mode controller were proposed to the fully-actuated subsystem, and then a cascade sliding mode controller was designed to control the under-actuated subsystem which was transformed into a cascade standard form. Thirdly, the stability of the designed control system was proved by using Lyapunov stability theorem. The results show that the proposed quadrotor control scheme is effective, it not only has good robustness and fast tracking dynamic performance, but also has the ability to restrain buffeting.
Key words: quadrotor; under-actuated system; sliding mode control; terminal sliding mode control; back stepping
四旋翼飞行器具有机动性强、控制灵活的特点,可以实现垂直起降、定点悬停等飞行姿态,因而被广泛应用于勘测、航拍、监控、侦查等活动中,近年来已经成为军事、民用领域的研究热点。六自由度的小型四旋翼飞行器模型具有典型的非线性、强耦合性和欠驱动特性,又极易受到模型本身不确定性和外界空气动力的干扰,因而在控制上存在一定难度[1]。四旋翼飞行器常见的控制方法有Backstepping反步法[2]、自适应控制[3]、滑模控制[4]等,近几年,一些新颖的控制方法如自抗扰控制[5]、模糊控制[6]、鲁棒预测控制[7]等也成功应用到四旋翼的控制中。其中滑模控制因其具有鲁棒性强的特点,成为四旋翼控制的研究热点之一。DIKMEN等[8]设计了应用于姿态控制的滑模控制器;XU等[9]所设计的滑模控制器同时完成了姿态控制和位置控制;LEE等[10]提出了一种自适应控制与滑模控制相结合的控制方法,通过自适应修正不确定性的估计值,减小了滑模控制器的增益,使滑模控制更适用于电量有限的微小型四旋翼;王俊生[11]将滑模控制实际应用于基于OS4四旋翼平台的飞行实验中,并取得了较好的控制效果。在此,本文作者采用滑模控制与Backstepping相结合的方法,得到的控制器结构简单,鲁棒性强,对于具有强扰动和不确定性的四旋翼飞行系统具有很好的控制效果。在滑模控制的基础上,还将设计有限时间终端滑模控制器,并对两者的控制效果进行比较。
1 四旋翼飞行器非线性模型
四旋翼的原始动力学模型非常复杂[12],在合理忽略摩擦阻力和陀螺效应的情况下,得到四旋翼飞行器的简化模型[9]:
 (1)
(1)
其中:(x,y,z)表示飞行器的位置;f,θ和ψ为飞行器的姿态参数,分别为滚转角、俯仰角和偏航角;Ki为阻力系数;Ii为每个轴的转动惯量;Ui为4个控制量;m为飞行器的质量;g为重力加速度;l为飞行器的半径长。
四旋翼飞行器系统有6个自由度(x,y,z,f,θ,ψ)和4个控制量(U1,U2,U3,U4),独立控制变量的个数小于自由度的个数,因此,四旋翼飞行器是一个典型的欠驱动系统。
2 控制器的设计
2.1 分析处理飞行器模型
在设计控制器前,先对四旋翼飞行器的模型进行分析和处理。将模型(1)划分为2部分:子系统(2)有2个控制量(U1,U4)和2个被控量(z,ψ),因此,是全驱动系统;子系统(3)有2个控制量(U2,U3)和4个被控量(x,y,f,θ),因此,是欠驱动系统。
 (2)
(2)
 (3)
(3)
2.2 全驱动子系统的滑模控制器设计
全驱动子系统由高度和偏航角2个独立通道组成,因此可以分别设计控制器。以高度通道为例,设计基于Backstepping的滑模控制器。
Backstepping的核心思想是设计1个虚拟控制量,以此为中间量,利用Lyapunov稳定理论反推真正的控制量。对于二阶系统,用Backstepping法设计滑模控制器分为2步。
第1步,定义误差变量:
 (4)
(4)
则
 (5)
(5)
假设虚拟控制量ρ为
 (6)
(6)
其中:α1为正常数。
把式(6)代入 中,得
中,得
 (7)
(7)
定义 ,则
,则
 (8)
(8)
根据Lyapunov稳定理论,选择Lyapunov函数 ,则
,则
 (9)
(9)
多余项e1e2使得系统无法满足Lyapunov稳定定理,故在第2步设计中,需要在真正的控制量U1中加入1项,以消除e1e2。
第2步,选择滑动平面:
 (10)
(10)
 (11)
(11)
定义整个控制系统的Lyapunov函数:
 (12)
(12)
 (13)
(13)
采用指数型滑模趋近律[13]:
 (14)
(14)
其中: ;
; 。
。
故式(11)和(14)联立可以求得

 (15)
(15)
为了消除第1步中引入的e1e2项,在 中加入e1项,得
中加入e1项,得

 (16)
(16)
验证Lyapunov稳定性:
 (17)
(17)
故系统满足Lyapunov稳定性定理,控制器设计完成。同理可以得到偏航角通道的控制器:

 (18)
(18)
2.3 全驱动子系统的终端滑模控制器设计
2.2节所设计的滑模控制器采用线性滑模面,系统为指数型收敛,在时间趋于无穷的情况下无限趋近于滑模面。终端滑模控制是一种有限时间控制,即系统能在有限的时间内收敛到滑模面,具有更好的收敛性能和鲁棒性[11]。
首先引入有限时间Lyapunov稳定判据[14]。
假设存在连续可微函数V,定义域 ,使得满足下面条件:
,使得满足下面条件:
1) V为正定函数;
2) 存在正实数c>0和α∈(0,1),以及1个包含原点的开邻域 ,使得下列条件成立:
,使得下列条件成立:
 ,
,
则系统为有限时间稳定的。
可以利用有限时间Lyapunov稳定判据,在滑模控制器的基础上,设计四旋翼全驱动子系统的终端滑模控制器。
仍然以高度控制为例,选择非线性滑模面[14]:
 (19)
(19)
其中:β为正常数;p和q为正奇数,且2q>p>q。
 (20)
(20)
根据滑模控制原理得

 (21)
(21)
其中:ε,M和k均为正实数。
选取Lyapunov函数 ,
,

 (22)
(22)
根据有限时间系统的Lyapunov稳定判据,系统有限时间稳定。
2.4 欠驱动子系统的滑模控制器设计
欠驱动系统形式多种多样,控制器的设计方法也不尽相同。首先给出欠驱动模型的一类标准形式,即欠驱动级联系统[15]:
 (23)
(23)
其中:d1和d2为扰动项;u为控制量;f1是关于x1,x2,x3的函数,且满足 ,
, 可逆且有界。
可逆且有界。
将式(3)所示的四旋翼飞行器欠驱动子系统改写欠驱动级联形式:
 (24)
(24)
其中: ;
; ;
; ;
; ;
; ;
; 。由于全驱动子系统的响应速度很快,偏航角ψ可以在很短的时间内到达给定值ψd,因此,取近似ψ≈ψd以简化设计。令
。由于全驱动子系统的响应速度很快,偏航角ψ可以在很短的时间内到达给定值ψd,因此,取近似ψ≈ψd以简化设计。令
 ,
,
 ,
,
根据滑模变结构控制的原理,定义滑动平面: ,其中c1,c2和c3为控制器参数。为了使滑模控制系统稳定,要求系统能迅速收敛至滑动平面,并沿滑动平面运动不再离开滑动平面。
,其中c1,c2和c3为控制器参数。为了使滑模控制系统稳定,要求系统能迅速收敛至滑动平面,并沿滑动平面运动不再离开滑动平面。
故在系统无外加干扰的情况下(即),通过解方程 ,得到在滑动模态区域内的等效控制
,得到在滑动模态区域内的等效控制 。
。

 (25)
(25)
在考虑不确定性和外加干扰的情况下,用d1和d2表示模型本身不确定性和外部扰动的总和,d1和d2为有界扰动,且满足 。此时控制律为等效控制和切换控制之和,
。此时控制律为等效控制和切换控制之和, ,利用Lyapunov稳定性理论求得切换控制
,利用Lyapunov稳定性理论求得切换控制 。
。
取Lyapunov函数 ,对其求导并将代入得到:
,对其求导并将代入得到:
 (26)
(26)
令 (27)
(27)
其中: ;λ为正常数。
;λ为正常数。
将式(26)代入式(27)得
 (28)
(28)
根据Lyapunov稳定定理,系统稳定。
 (29)
(29)
其中:


2.5 抖振的抑制
滑模控制是一种需要频繁切换控制状态的控制方法,系统在到达滑模面后,将沿滑模面运动,但由于切换函数在实际控制中的滞后性,系统会在滑模面附近很小的范围内做高频振荡即抖振[13]。抖振现象会给控制系统带来不稳定,破坏系统性能,在理论上无法完全消除,但可以采取一定的措施来抑制。
本文采用一种高增益连续函数R(S)替代上述控制器中的符号函数sgn(S),可以在一定程度上抑制抖振:
 (30)
(30)
其中:δ为很小的正常数。
3 仿真研究
本文通过Matlab仿真来验证所设计控制器的实效性。
四旋翼飞行器的参数设置为:K1=K2=K3=0.010,K4=K5=K6=0.012,I1=I2=1.25,I3=2.5,m=2 kg,l=0.2 m,g=9.8 m/s2。
首先对全驱动子系统进行普通滑模控制和终端滑模控制的对比仿真研究。经过调试,普通滑模控制器参数选择为:α1=1,ε1=0.5,k1=2,α4=1.5,ε4=0.7,k4=2,终端滑模控制器参数选择为:β1=7,q1=3,p1=5,ε1=0.5,β4=7,q4=3,p4=5,ε4=0.4,M=1。
采用普通滑模控制器和终端滑模控制器时,飞行器高度和偏航角的变化曲线见图1。由图1可知:对于四旋翼飞行器的控制问题,普通滑模控制器可以在较短的时间内使飞行器稳定到期望位置和姿态,且无超调,可以满足控制要求;终端滑模控制在控制器设计和参数调试上更复杂,但收敛速度更快,比普通滑模控制器的控制效果更好。
然后对飞行器系统进行飞行仿真。全驱动子系统采用普通滑模控制,欠驱动子系统采用级联形式的滑模控制。经过多次调试,确定控制器的参数如下:α1=0.5,ε1=0.5,k1=5,α4=1,ε4=2,k4=5,c1=40,c2=60,c3=25,M=10。
要求飞行器从坐标(1,1,2)处运动到(3,3,5)处,偏航角到达给定值ψd=45°,并保持俯仰角和滚转角平稳收敛到0°,即飞行姿态平稳。
仿真结果如图2和图3所示。由图2和图3可知飞行器的位置和姿态角均在9 s内收敛到给定值。
由于第2.4节设计欠驱动系统控制器时取近似ψ≈ψd,下面分析该近似值选取的合理性。分析图3中偏航角的变化曲线可知:偏航角通道的响应速度很快,在2 s左右达到40°,即给定值的89%,又由于偏航角在控制器求解中以正余弦三角函数的形式出现,仅作为系数存在,故该近似值的选取对控制器的影响很小,对控制效果的影响也可以忽略不计。
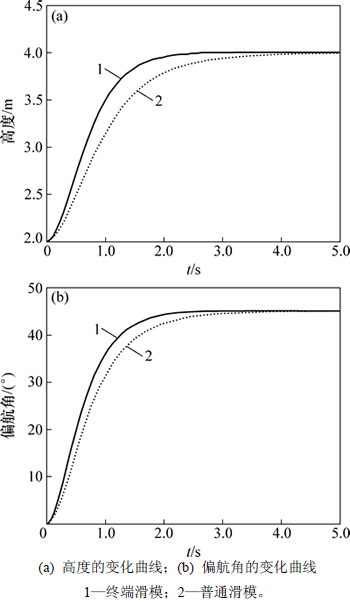
图1 普通滑模与终端滑模控制效果对比
Fig. 1 Comparison between sliding mode control and terminal sliding mode control
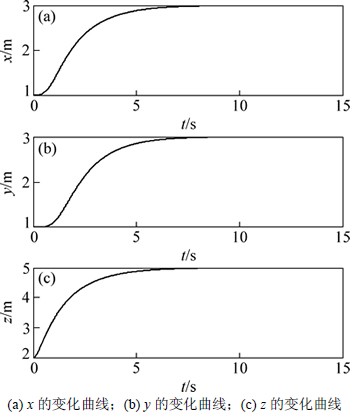
图2 飞行器的位置状态量仿真结果
Fig. 2 Simulation results of position states of quadrotor

图3 飞行器的姿态角仿真结果
Fig. 3 Simulation results of attitude angles of quadrotor
分析位置和姿态的仿真曲线可知:飞行器在较短的时间内到达期望位置并悬停在该位置,俯仰角和滚转角变化在很小的范围内,说明飞行器飞行姿态平稳,故该滑模控制器对四旋翼飞行器的控制是有效的。
4 结论
1) 针对六自由度四旋翼飞行器这一典型的欠驱动非线性系统,设计滑模控制器。首先将四旋翼模型分成全驱动和欠驱动系统2部分,然后这对这2部分分别设计滑模控制器。对全驱动部分设计基于Backstepping的滑模控制和有限时间终端滑模控制2种控制器,对欠驱动部分设计了级联形式的滑模控制。利用Lyapunov稳定理论证明了控制系统的稳定性。最后通过数值仿真对所设计的整体控制方案进行验证,证明该控制方案达到了满意的动态控制性能,并能有效地抑制抖振的发生。
2) 对全驱动部分的普通滑模控制器和终端滑模控制器的进行了仿真比较,终端滑模控制器不仅收敛速度快,而且控制效果更好。
参考文献:
[1] YU Yali, SUN Feng, WANG Yuanxi. Controller design of quadrotor aerial robot[J]. Physics Procedia, 2012, 33: 1254-1260.
[2] ASHFAQ A M, WANG Daobo. Modeling and backstepping-based nonlinear control strategy for a 6 DOF quadrotor helicopter[J]. Chinese Journal of Aeronautics, 2008, 21(3): 261-268.
[3] NICOL C, MACNAB C J B, RAMIREZ-SERRANO A. Robust adaptive control of a quadrotor helicopter[J]. Mechatronics, 2011, 21(6): 927-938.
[4] BOUABDALLAH S, SIEGWART R. Backstepping and sliding-mode techniques applied to an indoor micro quadrotor[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain: IEEE, 2005: 2247-2252.
[5] XIA Guoyan, LIU Zhenghua. Quadrotor unmanned helicopter attitude control based on improved ADRC[C]//Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference. Yantai, China: IEEE, 2014: 916-921.
[6] RAFFO G V, ORTEGA M G, RUBIO F R. An integral predictive/nonlinear H∞ control structure for a quadrotor helicopter[J]. Automatica, 2010, 46(1): 29-39.
[7] ZEGHLACHE S, SAIGAA D, KARA K. Backstepping sliding mode controller improved with fuzzy logic: application to the quadrotor helicopter[J]. Archives of Control Sciences, 2012, 22(3): 315-342.
[8] DIKMEN I C, ARISOY A, TEMELTAS H. Attitude control of a quadrotor[C]//Proceedings of the 4th International Conference on Recent Advances in Space Technologies. Istanbul, Turkey: IEEE, 2009: 722-727.
[9] XU Rong, OZGUNER U. Sliding mode control of a quadrotor helicopter[C]//Proceedings of the 45th IEEE Conference on Decision and Control. San Diego, California, USA: IEEE, 2006: 4957-4962.
[10] LEE D, KIM H J, SASTRY S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter[J]. International Journal of Control, Automation and Systems, 2009, 7(3): 419-428.
[11] 王俊生. 四旋翼碟形飞行器控制系统设计及控制方法研究[D]. 长沙: 国防科学技术大学机电工程与自动化学院, 2007: 18-35.
WANG Junsheng. Design of control system and research on control method for the quad-rotor[D]. Changsha: National University of Defense Technology. College of Mechatronic Engineering and Automation, 2007: 18-35.
[12] BOUABDALLAH S. Design and control of quadrotors with application to autonomous flying[D]. Lausanne, Switzerland: Ecole Polytechnique Federale in Lausanne, 2007: 15-25.
[13] 刘金琨. 滑模变结构控制Matlab仿真[M]. 北京: 清华大学出版社, 2005: 35-36.
LIU Jinkun. Slide mode varying structure control Matlab simulation[M]. Beijing: Tsinghua University Press, 2015: 35-36.
[14] 丁世宏, 李世华. 有限时间控制问题综述[J]. 控制与决策, 2011, 26(2): 161-169.
DING Shihong, LI Shihua. A survey for finite-time control problems[J]. Control and Decision, 2011, 26(2): 161-169.
[15] 丁凤. 几类欠驱动机器人系统的滑模控制与应用[D]. 武汉: 华中科技大学自动化学院, 2013: 17-21.
DING Feng. Sliding Mode control and application for underactuated robot systems[D]. Wuhan: Huazhong University of Science and Technology. College of Automation, 2013: 17-21.
(编辑 杨幼平)
收稿日期:2016-04-06;修回日期:2016-06-18
基金项目(Foundation item):国家自然科学基金资助项目(61573199,61573197);天津市自然科学基金资助项目(14JCYBJC18700)(Projects (61573199, 61573197) supported by the National Natural Science Foundation of China; Project (14JCYBJC18700) supported by the Natural Science Foundation of Tianjin City)
通信作者:陈增强,博士,教授,博士生导师,从事复杂系统建模控制与仿真、飞行器制导优化与控制研究;E-mail:chenzq@nankai.edu.cn

