欠驱动船路径跟踪的反演自适应动态滑模控制方法
廖煜雷,万磊,庄佳园
(哈尔滨工程大学 水下智能机器人技术国防科技重点实验室,黑龙江 哈尔滨,15001)
摘要:针对欠驱动水面船的路径跟踪控制系统,提出一种反演自适应动态滑模控制方法。该系统由船舶艏摇非线性响应模型和Serret-Frenet误差动力学方程组成,并考虑建模误差和外界干扰力等不确定性。经过简化处理,将原欠驱动系统的控制问题转化为非线性系统的镇定问题。同时,基于反步方法和动态滑模控制理论,设计自适应动态滑模控制器。通过理论分析,证明在该控制器作用下,路径跟踪控制系统是全局渐近稳定的。仿真试验表明:该控制器对系统参数摄动和外界干扰不敏感,具有强鲁棒性和自适应性。
关键词:欠驱动水面船;路径跟踪;动态滑模控制;反步方法;自适应
中图分类号:TP273;U664 文献标志码:A 文章编号:1672-7207(2012)07-2655-07
Backstepping adaptive dynamical sliding mode control method for path following of underactuated surface vessel
LIAO Yu-lei, WAN Lei, ZHUANG Jia-yuan
(National Key Laboratory of Science and Technology on Autonomous Underwater Vehicle,
Harbin Engineering University, Harbin 150001, China)
Abstract: A method of backstepping adaptive dynamical sliding mode control (DSMC) was addressed for the path following control system of the underactuated surface vessel. The system consists of the nonlinear ship response model and the Serret-Frenet error dynamics equations. The control system takes account of the modeling errors and external disturbances. It transformed the original underactuated system into a nonlinear system via simplified analysis. An adaptive dynamical sliding mode controller was proposed based on backstepping method and dynamical sliding mode control theory. By means of theory analysis, it was proven that the proposed controller can render the path following control system globally asymptotically stable. Simulation results show that the controller is robust and adaptive to the systemic variations or disturbances.
Key words: underactuated surface vessel; path following; dynamical sliding mode control; backstepping method; adaptive
欠驱动水面船(USV)轨迹或路径跟踪控制的难点是:系统具有欠驱动特性。许多非线性解决方法不能直接应用到欠驱动控制中,数学模型存在不可积的二阶非完整约束,不能被反馈线性化[1];USV的运动和动力模型具有强非线性、耦合性和不确定性。与轨迹跟踪相比,目前路径跟踪方面的研究较少。USV的路径跟踪问题常采用2种方式来解决:一是把它当作轨迹跟踪问题来处理[2-4];二是针对路径跟踪误差动力学模型进行合适的变换,将跟踪控制问题简化为镇定控制问题[5-7]。后一种方式常利用Serret-Frenet坐标系来生成误差动力学模型。Encarnacao等[8]讨论Serret-Frenet坐标系下,船舶受到恒定方向海流干扰影响时的路径跟踪问题,所设计的控制器能跟踪直线或是圆形路径。Skjene等[9]借助Serret-Frenet坐标系下的运动学模型变换以及动力学模型的线性化处理,提出一种路径跟踪控制器。在文献[9]的基础上,Do等[10]设计一种输出反馈控制律,并证明该控制律能保证USV在干扰力影响下的收敛性。但是该方法需要进行状态变换,易引起奇异性,从而导致路径跟踪系统不全局稳定。Zhen等[11]针对简化后的线性模型,基于Backstepping法和Lyapunov直接法设计路径跟踪控制器,并进行试验验证。但模型过于简单,设计中忽略船舶艏摇运动非线性因素的影响。针对上述文献存在的问题和欠驱动水面船路径跟踪控制系统的特点,经过简化分析,将欠驱动系统的路径跟踪问题变为非线性系统的镇定问题。基于简化后的数学模型,将自适应技术同Backstepping设计法相结合,采用动态滑模控制方法(DSMC),提出一种反演自适应动态滑模控制器。设计过程证明该控制器能保证路径跟踪系统的全局渐近稳定性。该方法的优点是控制器对模型改变、建模误差和环境干扰力等不确定性影响不敏感,具有良好的自适应能力和鲁棒性能。
1 系统描述和分析
假设惯性、阻尼矩阵皆为定常对称矩阵;忽略垂荡、纵摇和横摇的影响,即只考虑船在水平面内的运动,则船舶的运动和动力学模型可描述为[12]
 (1)
(1)
其中: 为船舶艏向角;u,
为船舶艏向角;u, 和r分别表示在随船坐标系中船的纵向、横向和偏航(角)速度;纵向力Fu和偏航力矩Tr是仅有的控制输入,mii和dii分别是船的惯性和阻尼参数矩阵在随船坐标系3个坐标轴上的分量,均假设为正常数。由于式(1)的-方程中没有横向控制输入,因此该船具有欠驱动性。
和r分别表示在随船坐标系中船的纵向、横向和偏航(角)速度;纵向力Fu和偏航力矩Tr是仅有的控制输入,mii和dii分别是船的惯性和阻尼参数矩阵在随船坐标系3个坐标轴上的分量,均假设为正常数。由于式(1)的-方程中没有横向控制输入,因此该船具有欠驱动性。
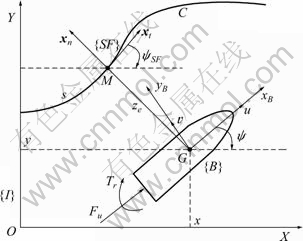
图1 船舶在水平面内路径跟踪的示意图
Fig.1 Path following model of ship
船舶在Serret-Frenet坐标系下的路径跟踪示意图,如图1所示。图1中,{SF}表示Serret-Frenet坐标系;{I}表示惯性坐标系;{B}表示随船坐标系。C是预先设定的参考路径;坐标系{SF}的原点M是船舶重心G在C上的正交投影,s是C上任意一点与M点之间的距离,xt,xn分别是M点的单位切向、法向向量。 为xt与坐标轴X之间的夹角;ze表示{SF}系原点M同{B}系原点G之间的距离。基于Serret-Frenet方程,船舶路径跟踪误差运动学方程[9]可描述为:
为xt与坐标轴X之间的夹角;ze表示{SF}系原点M同{B}系原点G之间的距离。基于Serret-Frenet方程,船舶路径跟踪误差运动学方程[9]可描述为:
 (2)
(2)
 (3)
(3)
其中: 表示横侧偏差;
表示横侧偏差; 为给定路径的曲率。
为给定路径的曲率。
船舶在开阔海域内航行时,其路径跟踪问题可简化为跟踪直线、或是分段直线路径,因此进一步假设=0。则艏向误差动力学方程可简化为[11]
 (4)
(4)
为便于控制系统设计,假设u是正常量。实际控制中,经常采用独立的速度控制器来保证船舶的纵向速度,因此将u假设为正常量是合理的[9]。另外,在船实际操纵中,相对于其他自由度的运动量来说是小量。因此,假设很小,可以忽略不计,即=0。
另外,由式(1)可知,偏航力矩Tr是艏摇运动r的控制输入。实际中对多数船舶来说,偏航力矩Tr是通过对舵角 的控制来实现的。且在船舶自动舵的设计中,航向操纵系统常采用一阶非线性艏摇响应方程[13]。
的控制来实现的。且在船舶自动舵的设计中,航向操纵系统常采用一阶非线性艏摇响应方程[13]。
根据上述分析,考虑存在建模误差和环境干扰力等不确定性的影响,则USV路径跟踪的数学模型为
 (5)
(5)
其中:T,K为操纵性参数; 为非线性项系数;为舵角;F为建模误差
为非线性项系数;为舵角;F为建模误差 和未知环境干扰力
和未知环境干扰力 不确定性影响的总和,即
不确定性影响的总和,即 ,假设不确定性的上界为
,假设不确定性的上界为 ,且F为慢变过程,即
,且F为慢变过程,即 。
。
经上述简化分析,将欠驱动船舶的路径跟踪问题,转变为非线性系统(见式(5))的镇定控制问题。
显然,欠驱动船舶路径跟踪的控制目标是设计控制器驱使 收敛到0,即针对系统(式(5))设计一种反馈控制律以保证系统是全局渐进稳定的。
收敛到0,即针对系统(式(5))设计一种反馈控制律以保证系统是全局渐进稳定的。
2 控制器设计
为便于控制器设计,首先对系统(式(5))做如下的全局坐标变换,并令 ,
, ,
, 。
。
 (6)
(6)
其中:k为正常数。
将坐标变换(式(6))代入系统(式(5)),得到一个新的系统
 (7)
(7)
其中: ,
, 。
。
定理1:考虑系统(式(7)),如果选择控制律δ使得x1全局渐进稳定,那么也能保证原系统状态 全局渐进稳定。从而系统(式(7))是最小相位内部稳定系统。
全局渐进稳定。从而系统(式(7))是最小相位内部稳定系统。
证明:从式(7)可得:
 (8)
(8)
构造与式(7)等价的非线性系统
 (9)
(9)
其中: ,
, ;
; 表示系统输出。显然,式(9)的相对阶为2,且当控制律δ使得x1 (即
表示系统输出。显然,式(9)的相对阶为2,且当控制律δ使得x1 (即 )全局收敛到0时,其零动态为
)全局收敛到0时,其零动态为
 (10)
(10)
定义Lyapunov预选函数为 ,将Vz对时间求导,可得
,将Vz对时间求导,可得 。由Lyapunov
。由Lyapunov
稳定性理论易知:ze是全局渐进稳定的。从而系统(式(7))是最小相位内部稳定系统。同时由式(8)可知:当x1全局收敛到0时,有:
 (11)
(11)
即,当ze全局渐进稳定时, 也具有全局渐进稳定性。定理1得证。
也具有全局渐进稳定性。定理1得证。
由上述分析可知,欠驱动系统(式(7))可简化为如下全驱动系统,
 (12)
(12)
因此欠驱动系统(式(5))的控制问题,可简化为全驱动系统(式(12))的控制问题。该系统是具有下三角结构特性的非线性系统,可以进行反步设计。
2.1 反演自适应动态滑模控制器设计
在非线性控制系统中,滑模变结构控制方法获得广泛的应用[14-16],但其不可避免地存在“抖振”问题。作为一种消除“抖振”的有效方法,动态滑模控制被应用到移动机器人、并联机器人、机械臂等非线性系统中[17-19]。下面利用反步方法,基于动态滑模控制理论[20],结合自适应技术,进行控制器设计。
考虑系统(式(12))的子系统
 (13)
(13)
定义Lyapunov预选函数为:
 (14)
(14)
将V1对时间求导,可得:
 (15)
(15)
把x2看作式(13)的虚拟控制输入,设计反馈控制律
 (16)
(16)
其中:k1为正常数。将式(16)代入式(15),整理可得:
 (17)
(17)
即,在控制律(式(16))的作用下,式(13)是全局指数稳定的。然而x2不是实际的控制输入,定义误差变量:
 (18)
(18)
将式(18)代入式(15),重新整理可得:
 (19)
(19)
则系统(式(12))可重写为:
 (20)
(20)
其中: 。
。
定义Lyapunov预选函数为:
 (21)
(21)
其中: 为未知不确定项F的估计值。
为未知不确定项F的估计值。
选取一阶动态滑模控制的切换函数为:
 (22)
(22)
其中:c1为正常数。由式(22)和式(20)的第1式可得:
 (23)
(23)
将V2对时间求导,并将式(23)代入,整理可得:


 (24)
(24)
对式(22)求导,令辅助控制项 ,可得:
,可得:
 (25)
(25)
定义Lyapunov预选函数为:
 (26)
(26)
将V3对时间求导,可得:


 (27)
(27)
为使系统从任意初始状态出发到达S的时间是有限的,且为全局到达,选取到达律为:
 (28)
(28)
其中:ks和ws为正常数,sgn(x)是符号函数。由式(28)得,选取动态滑模控制律v为:

 (29)
(29)
将式(29)代入式(27),可得:

 (30)
(30)
设计F的自适应律为:
 (31)
(31)
将式(31)代入式(30),则有:
 (32)
(32)
选取k,k1,c1,ks和ws为正常数,则有 成立,即在动态滑模控制律(式(29))和自适应律(式(31))的作用下,系统(式(20))是Lyapunov意义下全局指数稳定的。从而保证了系统(式(12))的全局指数稳定性。由定理1可证,原系统(式(5))状态
成立,即在动态滑模控制律(式(29))和自适应律(式(31))的作用下,系统(式(20))是Lyapunov意义下全局指数稳定的。从而保证了系统(式(12))的全局指数稳定性。由定理1可证,原系统(式(5))状态 皆能全局渐进收敛到0。
皆能全局渐进收敛到0。
2.2 反步控制器设计
假设不确定性项F=0。定义Lyapunov预选函数为:
 (33)
(33)
将V4对时间求导,并将(式(20))的第2式代入,可得:
 (34)
(34)
为使 ,设计状态反馈控制律为:
,设计状态反馈控制律为:
 (35)
(35)
其中:k2为正常数。将控制律(式(35))代入式(34),则有:
 (36)
(36)
显然,在控制律(式(35))的作用下系统(式(12))的系统输出x1和x2将全局指数收敛到0,即原系统(式(5))状态 是全局渐进稳定的。
是全局渐进稳定的。
2.3 系统稳定性分析
由上述反步设计过程和Lyapunov稳定性理论可知,通过逐步迭代设计Lyapunov函数使系统指数渐近稳定,最终实现对原系统的全局渐近镇定。同时,根据滑模控制理论,可证明渐近稳定的系统能在有限时间内到达滑模表面,从而保证整个系统的稳定性。因此,结论如下:
定理2:考虑存在不确定性影响下的控制系统(式(12)),在动态滑模控制律(式(29))和自适应律(式(31))的作用下,可保证系统(式(12))是全局指数稳定的。这实现了对欠驱动船舶路径跟踪控制系统(式(5))的全局渐进镇定。
证明:由2.1节的设计过程得证。
在前面的控制系统分析中,假设纵向速度u为常量;同时忽略横向运动的影响。实际上船舶在机动过程中会有一定的速度损失,且横向速度会有一定的变化。在考虑横向运动和纵向运动影响时,USV路径跟踪的数学模型可描述为
 (37)
(37)
在考虑横向运动时,横向运动系统是有界输入有界输出稳定的(BIBO)。
证明:定义如下预选Lyapunov函数:
 (38)
(38)
将V5对时间求导,并把式(37)的第2式代入,可得:
 (39)
(39)
 <0,如
<0,如 >
> (40)
(40)
由式(39)可知:如果V5是递减函数,则 也是递减函数,式(40)表明当>时,V5是递减函数。
也是递减函数,式(40)表明当>时,V5是递减函数。
定理2可知:u,r有界,这决定具有一个有限的上界/d22。
定理3:在状态反馈控制律(式(35))的作用下,系统(式(12))是全局指数渐近稳定,即保证USV路径跟踪控制系统的全局渐近稳定性。
证明:由2.2节和2.3节的设计过程得证。
3 仿真结果和分析
本节进行仿真对比试验以验证所提控制器的有效性。USV船模的具体参数如下:m11=200 kg,m22=250 kg,m33=80 kg・m2,d11=70 kg/s,d22=100 kg/s,d33=50 kg・m2/s,K=1,T=2, 。仿真中初始状态全取为:x0=0,y=0,
。仿真中初始状态全取为:x0=0,y=0, ,u0=2 m/s,
,u0=2 m/s, ,r0=0;考虑舵角的机械饱和限制条件:-30°≤δ≤+30°。仿真中反演自适应动态滑模控制器称为控制律1,反演控制器称为控制律2。控制律1控制参数选为:k=0.1,k1=0.1,c1=0.3,ks=0.01,ws=0.01;控制律2控制参数选为:k=0.1,k1=0.1,k2=1。
,r0=0;考虑舵角的机械饱和限制条件:-30°≤δ≤+30°。仿真中反演自适应动态滑模控制器称为控制律1,反演控制器称为控制律2。控制律1控制参数选为:k=0.1,k1=0.1,c1=0.3,ks=0.01,ws=0.01;控制律2控制参数选为:k=0.1,k1=0.1,k2=1。
首先,将控制律1分别应用于简化模型即系统(式(5)),非简化模型即系统(式(37)),进行仿真对比试验,非简化模型时的推力设为常值Fu=140 N以维持航速,仿真结果如图2所示。
从图2可见:控制律1在2种模型中均使USV快速地跟踪上期望轨迹,路径跟踪偏差几乎是匀速衰减,运动轨迹和航向偏差输出光顺、无振荡,但在非简化模型下有轻微的超调。这说明反演自适应动态滑模控制器具有良好的自适应性和鲁棒性能。图2列出采用非简化模型时的速度响应曲线,横向速度和纵向速度的变化非常小。上述分析表明:对于系统的简化处理是可行的。图2中舵角输出没有出现“抖振”现象,即该方法有效地削弱滑模控制的“抖振”问题。
以下仿真中,设定与角加速度同量级的不确定性输入:即建模误差为 ,外界干扰力为
,外界干扰力为 (°)/s2的正态白噪声。2种控制律在不同模型下的仿真对比试验结果,如图3和4所示。
(°)/s2的正态白噪声。2种控制律在不同模型下的仿真对比试验结果,如图3和4所示。
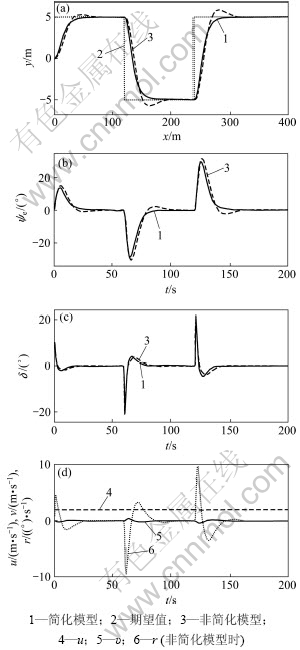
图2 不同模型下的系统状态响应曲线
Fig.2 System state response curve under different models
从图3可见:2种控制律均能保证USV迅速地收敛到期望轨迹,控制效果相似。但控制律2有一定的超调,且艏向误差较大。从图3和4可见:控制律1的舵角输很光顺、无振荡,具有较强抑制干扰的能力。
由图4可见:虽然USV的数学模型发生改变,但在2种控制律作用下,USV依然能收敛到设定轨迹。同控制律2相比,控制律1的收敛更快、超调较小;控制律1的舵角输出较光顺、振荡小、没有出现满舵现象,可见控制律1仍具有良好的控制性能。仿真对比结果表明:反演自适应动态滑模控制器对系统模型改变和外界干扰力的影响不敏感,具有良好的自适应能力和鲁棒性能。
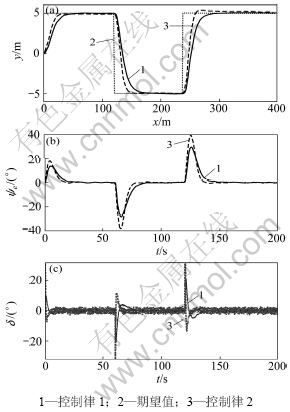
图3 不同控制器下的系统状态响应曲线(简化模型)
Fig.3 System state response curve under different controllers (simplified model)
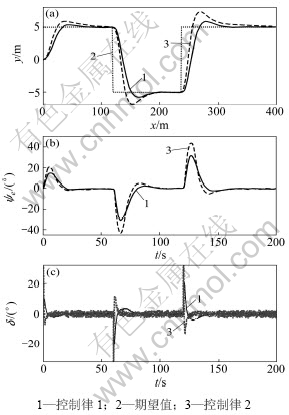
图4 不同控制器下的系统状态响应曲线(非简化模型)
Fig.4 System state response curve under different controllers (non-simplified model)
4 结论
(1) 基于一定假设,可将原单输入三输出的系统简化为一个单输入双输出的欠驱动系统。从仿真试验结果可看出,对系统的简化假设是合理可行的。
(2) 利用反步法设计法与一阶动态滑模控制方法相结合,设计反演自适应动态滑模控制器。从理论上证明该控制器保证USV路径跟踪系统的全局渐近稳定性。
(3) 仿真对比试验表明:该控制器具有较好的控制性能、自适应性和强鲁棒性。理论分析和仿真试验均验证了该控制方法的有效性。
参考文献:
[1] Jiang Z P. Global tracking control of underactuated ships by Lyapunov’s direct method[J]. Automatica, 2002, 38(2): 301-309.
[2] Do K D, Jiang Z P, Pan J. Underactuated ship global tracking under relaxed conditions[J]. IEEE Transactions on Automatic Control, 2002, 47(9): 1529-1536.
[3] Do K D, Jiang Z P, Pan J. Robust adaptive path following of underactuated ships[J]. Automatica, 2004, 40(6): 929-944.
[4] Lefeber E, Pettersen K Y, Nijmeijer H. Tracking control of an underactuated ship[J]. IEEE Transactions on Control Systems Technology, 2003, 11(1): 52-61.
[5] Breivik M, Fossen T I. Path following for marine surface vessels[C]//Proceeding of the MTTS/IEEE TECHNO-OCEAN. Kobe, Japan: IEEE Press, 2004: 2282-2289.
[6] Breivik M, Fossen T I. Principles of guidance-based path following in 2D and 3D[C]//Proceeding of the 44th IEEE Conference on Decision and Control. Seville, Spain: IEEE Press, 2005: 627-634.
[7] Lapierre L, Soetanto D, Pascoal A. Nonlinear path following with applications to the control of autonomous underwater vehicles[C]//Proceeding of the 42nd IEEE Conference on Decision and Control. Hawaii: IEEE Press, 2003: 1256-1261.
[8] Encarnacao P, Pascoal A, Arcak M. Path following for autonomous marine craft[C]//Proceedings of the 5th IFAC Conference on Maneuvering and Control of Marine Craft. Aalborg, Denmark: IFAC, 2000: 117-122.
[9] Skjetne R, Fossen T I. Nonlinear maneuvering and control of ships[C]//Proceedings of the Ocean MTS/IEEE Conference and Exhibition. Honolulu, USA: IEEE Press, 2001: 1808-1815.
[10] Do K D, Pan J. State and output-feedback robust path-following controllers for underactuated ships using Serret-Frenet frame[J]. Ocean Eng, 2004, 31(5/6): 587-613.
[11] ZHEN L, JING S, Soryeok O. Design, analysis and experimental validation of a robust nonlinear path following controller for marine surface vessels[J]. Automatica, 2009, 45(6): 1649-1658.
[12] Fossen T I. Marine control systems-guidance, navigation and control of ships, rigs and underwater vehicles[M]. Trondheim, Norway: Marine Cybernetics, 2002: 35-120.
[13] 范尚雍. 船舶操纵性[M]. 北京: 国防工业出版社, 2002: 30-39.
FAN Shang-yong. Ship maneuverability[M]. Beijing: National Defense Industry Press, 2002: 30-39.
[14] 杨勇, 文丹, 罗安, 等. 基于多目标优化的模糊滑模变结构控制及应用[J]. 中南大学学报: 自然科学版, 2006, 37(6): 1149-1153.
YANG Yong, WEN Dan, LUO An, et al. Fuzzy sliding mode variable structure control based on multi-objective optimization and its application[J]. Journal of Central South University: Science and Technology, 2006, 37(6): 1149-1153.
[15] 马博军, 方勇纯, 肖潇. 不确定非线性系统的滑模自适应控制器设计[J]. 中南大学学报: 自然科学版, 2005, 36(1): 174-178.
MA Bo-jun, FANG Yong-chun, XIAO Xiao. A sliding adaptive controller design for uncertain nonlinear system[J]. Journal of Central South University: Science and Technology, 2005, 36(1): 174-178.
[16] 任殿波, 张京明, 崔胜民, 等. 基于向量Lyapunov函数方法的顾前顾后型车辆跟随控制[J]. 中南大学学报: 自然科学版, 2010, 41(6): 2196-2200.
REN Dian-bo, ZHANG Jing-ming, CUI Sheng-min, et al. Vehicle following control using front and back information based on vector Lyapunov function[J]. Journal of Central South University: Science and Technology, 2010, 41(6): 2196-2200.
[17] 刘延斌, 韩秀英, 许晖. 3-RRRT并联机器人解耦的反演自适应动态滑模控制[J]. 系统仿真学报, 2008, 20(14): 3633-3636.
LIU Yan-bin, HAN Xiu-ying, XU Hui. Decoupled backstepping adaptive dynamic sliding mode control of a 3-RRRT parallel robot[J]. Journal of System Simulation, 2008, 20(14): 3633-3636.
[18] 徐玉华, 张崇巍, 鲍伟, 等. 基于动态滑模控制的移动机器人路径跟踪[J]. 合肥工业大学学报: 自然科学版, 2009, 32(1): 28-31.
XU Yu-hua, ZHANG Chong-wei, BAO Wei, et al. Mobile robot’s path following based on dynamic sliding mode control[J]. Journal of Hefei University of Technology, 2009, 32(1): 28-31.
[19] 吴玉香, 胡跃明. 二阶动态滑模控制在移动机械臂输出跟踪中的应用[J]. 控制理论与应用, 2006, 23(3): 411-415.
WU Yu-xiang. HU Yue-ming. Second order dynamical sliding mode control and its application to output tracking of mobile manipulators[J]. Control Theory & Applications, 2006, 23(3): 411-415.
[20] 刘金琨. 滑模变结构控制MATLAB仿真[M]. 北京: 清华大学出版社, 2002: 240-247.
LIU Jin-kun. MATLAB simulation for sliding mode control[M]. Beijing: Tsinghua University Press, 2002: 240-247.
(编辑 邓履翔)
收稿日期:2011-05-10;修回日期:2011-07-14
基金项目:国家自然科学基金资助项目(61004008);中央高校基本科研业务费专项资金(HEUCFZ1003)
通信作者:廖煜雷(1985-),男,重庆人,博士研究生,从事欠驱动无人水面艇的运动控制研究;电话:18903658103;E-mail: liaoyulei@hrbeu.edu.cn

