
Ƿ������·�����ٵķ�������Ӧ��̬��ģ���Ʒ���
�����ף����ڣ�ׯ��
(���������̴�ѧ ˮ�����ܻ����˼��������Ƽ��ص�ʵ���ң������� ��������15001)
ժ Ҫ��
����·�����ٿ���ϵͳ�����һ�ַ�������Ӧ��̬��ģ���Ʒ�������ϵͳ�ɴ�����ҡ��������Ӧģ�ͺ�Serret-Frenet����ѧ������ɣ������ǽ�ģ�������������Ȳ�ȷ���ԡ�������������ԭǷ����ϵͳ�Ŀ�������ת��Ϊ������ϵͳ�������⡣ͬʱ�����ڷ��������Ͷ�̬��ģ�������ۣ��������Ӧ��̬��ģ��������ͨ�����۷�����֤���ڸÿ����������£�·�����ٿ���ϵͳ��ȫ�ֽ����ȶ��ġ���������������ÿ�������ϵͳ�����㶯�������Ų����У�����ǿ³���Ժ�����Ӧ�ԡ�
�ؼ��ʣ�
Ƿ����ˮ�洬��·����������̬��ģ��������������������Ӧ��
��ͼ����ţ�TP273��U664 ���ױ�־�룺A ���±�ţ�1672-7207(2012)07-2655-07
Backstepping adaptive dynamical sliding mode control method for path following of underactuated surface vessel
LIAO Yu-lei, WAN Lei, ZHUANG Jia-yuan
(National Key Laboratory of Science and Technology on Autonomous Underwater Vehicle,
Harbin Engineering University, Harbin 150001, China)
Abstract: A method of backstepping adaptive dynamical sliding mode control (DSMC) was addressed for the path following control system of the underactuated surface vessel. The system consists of the nonlinear ship response model and the Serret-Frenet error dynamics equations. The control system takes account of the modeling errors and external disturbances. It transformed the original underactuated system into a nonlinear system via simplified analysis. An adaptive dynamical sliding mode controller was proposed based on backstepping method and dynamical sliding mode control theory. By means of theory analysis, it was proven that the proposed controller can render the path following control system globally asymptotically stable. Simulation results show that the controller is robust and adaptive to the systemic variations or disturbances.
Key words: underactuated surface vessel; path following; dynamical sliding mode control; backstepping method; adaptive
Ƿ����ˮ�洬(USV)�켣��·�����ٿ��Ƶ��ѵ��ǣ�ϵͳ����Ƿ�������ԡ���������Խ����������ֱ��Ӧ�õ�Ƿ���������У���ѧģ�ʹ��ڲ��ɻ��Ķ�������Լ�������ܱ��������Ի�[1]��USV���˶��Ͷ���ģ�;���ǿ�����ԡ�����ԺͲ�ȷ���ԡ���켣������ȣ�Ŀǰ·�����ٷ�����о����١�USV��·���������ⳣ����2�ַ�ʽ�������һ�ǰ��������켣��������������[2-4]���������·����������ѧģ�ͽ��к��ʵı任�������ٿ��������Ϊ��������[5-7]����һ�ַ�ʽ������Serret-Frenet����ϵ����������ѧģ�͡�Encarnacao��[8]����Serret-Frenet����ϵ�£������ܵ��㶨����������Ӱ��ʱ��·���������⣬����ƵĿ������ܸ���ֱ����Բ��·����Skjene��[9]����Serret-Frenet����ϵ�µ��˶�ѧģ�ͱ任�Լ�����ѧģ�͵����Ի����������һ��·�����ٿ�������������[9]�Ļ����ϣ�Do��[10]���һ��������������ɣ���֤���ÿ������ܱ�֤USV�ڸ�����Ӱ���µ������ԡ����Ǹ÷�����Ҫ����״̬�任�������������ԣ��Ӷ�����·������ϵͳ��ȫ���ȶ���Zhen��[11]��Լ������ģ�ͣ�����Backstepping����Lyapunovֱ�ӷ����·�����ٿ�������������������֤����ģ���ڼ�����к��Դ�����ҡ�˶����������ص�Ӱ�졣����������״��ڵ������Ƿ����ˮ�洬·�����ٿ���ϵͳ���ص㣬������������Ƿ����ϵͳ��·�����������Ϊ������ϵͳ�������⡣���ڼ����ѧģ�ͣ�������Ӧ����ͬBackstepping��Ʒ����ϣ����ö�̬��ģ���Ʒ���(DSMC)�����һ�ַ�������Ӧ��̬��ģ����������ƹ���֤���ÿ������ܱ�֤·������ϵͳ��ȫ�ֽ����ȶ��ԡ��÷������ŵ��ǿ�������ģ�ı䡢��ģ���ͻ����������Ȳ�ȷ����Ӱ�첻���У��������õ�����Ӧ������³�����ܡ�
1 ϵͳ�����ͷ���
������ԡ���������Ϊ�����Գƾ����Դ�������ҡ�ͺ�ҡ��Ӱ�죬��ֻ���Ǵ���ˮƽ���ڵ��˶��������˶��Ͷ���ѧģ�Ϳ�����Ϊ[12]
 (1)
(1)
���У�![]() Ϊ��������ǣ�u��
Ϊ��������ǣ�u��![]() ��r�ֱ��ʾ���洬����ϵ�д����������ƫ��(��)�ٶȣ�������Fu��ƫ������Tr�ǽ��еĿ������룬mii��dii�ֱ��Ǵ��Ĺ��Ժ���������������洬����ϵ3���������ϵķ�����������Ϊ������������ʽ(1)��
��r�ֱ��ʾ���洬����ϵ�д����������ƫ��(��)�ٶȣ�������Fu��ƫ������Tr�ǽ��еĿ������룬mii��dii�ֱ��Ǵ��Ĺ��Ժ���������������洬����ϵ3���������ϵķ�����������Ϊ������������ʽ(1)��![]() -������û�к���������룬��˸ô�����Ƿ�����ԡ�
-������û�к���������룬��˸ô�����Ƿ�����ԡ�
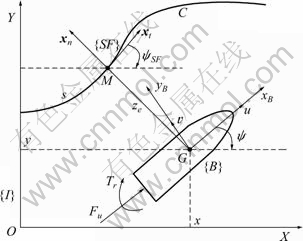
ͼ1 ������ˮƽ����·�����ٵ�ʾ��ͼ
Fig.1 Path following model of ship
������Serret-Frenet����ϵ�µ�·������ʾ��ͼ����ͼ1��ʾ��ͼ1�У�{SF}��ʾSerret-Frenet����ϵ��{I}��ʾ��������ϵ��{B}��ʾ�洬����ϵ��C��Ԥ���趨�IJο�·��������ϵ{SF}��ԭ��M�Ǵ�������G��C�ϵ�����ͶӰ��s��C������һ����M��֮��ľ��룬xt��xn�ֱ���M��ĵ�λ������������![]() Ϊxt��������X֮��ļнǣ�ze��ʾ{SF}ϵԭ��Mͬ{B}ϵԭ��G֮��ľ��롣����Serret-Frenet���̣�����·����������˶�ѧ����[9]������Ϊ��
Ϊxt��������X֮��ļнǣ�ze��ʾ{SF}ϵԭ��Mͬ{B}ϵԭ��G֮��ľ��롣����Serret-Frenet���̣�����·����������˶�ѧ����[9]������Ϊ��
![]() (2)
(2)
![]() (3)
(3)
���У�![]() ��ʾ���ƫ�
��ʾ���ƫ�![]() Ϊ����·�������ʡ�
Ϊ����·�������ʡ�
�����ڿ��������ں���ʱ����·����������ɼ�Ϊ����ֱ�ߡ����Ƿֶ�ֱ��·������˽�һ������![]() =0������������ѧ���̿ɼ�Ϊ[11]
=0������������ѧ���̿ɼ�Ϊ[11]
![]() (4)
(4)
Ϊ���ڿ���ϵͳ��ƣ�����u����������ʵ�ʿ����У��������ö������ٶȿ���������֤�����������ٶȣ���˽�u����Ϊ�������Ǻ�����[9]�����⣬�ڴ�ʵ�ʲ����У�![]() ������������ɶȵ��˶�����˵��С������ˣ�����
������������ɶȵ��˶�����˵��С������ˣ�����![]() ��С�����Ժ��Բ��ƣ���
��С�����Ժ��Բ��ƣ���![]() =0��
=0��
���⣬��ʽ(1)��֪��ƫ������Tr����ҡ�˶�r�Ŀ������롣ʵ���жԶ���������˵��ƫ������Tr��ͨ���Զ��![]() �Ŀ�����ʵ�ֵġ����ڴ����Զ��������У��������ϵͳ������һ��������ҡ��Ӧ����[13]��
�Ŀ�����ʵ�ֵġ����ڴ����Զ��������У��������ϵͳ������һ��������ҡ��Ӧ����[13]��
�����������������Ǵ��ڽ�ģ���ͻ����������Ȳ�ȷ���Ե�Ӱ�죬��USV·�����ٵ���ѧģ��Ϊ
 (5)
(5)
���У�T��KΪ�����Բ�����![]() Ϊ��������ϵ����
Ϊ��������ϵ����![]() Ϊ��ǣ�FΪ��ģ���
Ϊ��ǣ�FΪ��ģ���![]() ��δ֪����������
��δ֪����������![]() ��ȷ����Ӱ����ܺͣ���
��ȷ����Ӱ����ܺͣ���![]() �����費ȷ���Ե��Ͻ�Ϊ
�����費ȷ���Ե��Ͻ�Ϊ![]() ����FΪ������̣���
����FΪ������̣���![]() ��
��
��������������Ƿ����������·���������⣬ת��Ϊ������ϵͳ(��ʽ(5))���������⡣
��Ȼ��Ƿ��������·�����ٵĿ���Ŀ������ƿ�������ʹ![]() ������0�������ϵͳ(ʽ(5))���һ�ַ���������
������0�������ϵͳ(ʽ(5))���һ�ַ���������![]() �Ա�֤ϵͳ��ȫ�ֽ����ȶ��ġ�
�Ա�֤ϵͳ��ȫ�ֽ����ȶ��ġ�
2 ���������
Ϊ���ڿ�������ƣ����ȶ�ϵͳ(ʽ(5))�����µ�ȫ������任������![]() ��
��![]() ��
��![]() ��
��
 (6)
(6)
���У�kΪ��������
������任(ʽ(6))����ϵͳ(ʽ(5))���õ�һ���µ�ϵͳ
 (7)
(7)
����![]() ��
��![]() ��
��
����1������ϵͳ(ʽ(7))�����ѡ������ɦ�ʹ��x1ȫ�ֽ����ȶ�����ôҲ�ܱ�֤ԭϵͳ״̬![]() ȫ�ֽ����ȶ����Ӷ�ϵͳ(ʽ(7))����С��λ�ڲ��ȶ�ϵͳ��
ȫ�ֽ����ȶ����Ӷ�ϵͳ(ʽ(7))����С��λ�ڲ��ȶ�ϵͳ��
֤������ʽ(7)�ɵã�
 (8)
(8)
������ʽ(7)�ȼ۵ķ�����ϵͳ
 (9)
(9)
����![]() ��
��![]() ��
��![]() ��ʾϵͳ�������Ȼ��ʽ(9)����Խ�Ϊ2���ҵ������ɦ�ʹ��x1 (��
��ʾϵͳ�������Ȼ��ʽ(9)����Խ�Ϊ2���ҵ������ɦ�ʹ��x1 (��![]() )ȫ��������0ʱ�����㶯̬Ϊ
)ȫ��������0ʱ�����㶯̬Ϊ
![]() (10)
(10)
����LyapunovԤѡ����Ϊ![]() ����Vz��ʱ�����ɵ�
����Vz��ʱ�����ɵ�![]() ����Lyapunov
����Lyapunov
�ȶ���������֪��ze��ȫ�ֽ����ȶ��ġ��Ӷ�ϵͳ(ʽ(7))����С��λ�ڲ��ȶ�ϵͳ��ͬʱ��ʽ(8)��֪����x1ȫ��������0ʱ���У�
 (11)
(11)
������zeȫ�ֽ����ȶ�ʱ��![]() Ҳ����ȫ�ֽ����ȶ��ԡ�����1��֤��
Ҳ����ȫ�ֽ����ȶ��ԡ�����1��֤��
������������֪��Ƿ����ϵͳ(ʽ(7))�ɼ�Ϊ����ȫ����ϵͳ��
![]() (12)
(12)
���Ƿ����ϵͳ(ʽ(5))�Ŀ������⣬�ɼ�Ϊȫ����ϵͳ(ʽ(12))�Ŀ������⡣��ϵͳ�Ǿ��������ǽṹ���Եķ�����ϵͳ�����Խ��з�����ơ�
2.1 ��������Ӧ��̬��ģ���������
�ڷ����Կ���ϵͳ�У���ģ��ṹ���Ʒ�����ù㷺��Ӧ��[14-16]�����䲻�ɱ���ش��ڡ��������⡣��Ϊһ��������������Ч��������̬��ģ���Ʊ�Ӧ�õ��ƶ������ˡ����������ˡ���е�۵ȷ�����ϵͳ��[17-19]���������÷������������ڶ�̬��ģ��������[20]���������Ӧ���������п�������ơ�
����ϵͳ(ʽ(12))����ϵͳ
![]() (13)
(13)
����LyapunovԤѡ����Ϊ��
![]() (14)
(14)
��V1��ʱ�����ɵã�
![]() (15)
(15)
��x2����ʽ(13)������������룬��Ʒ���������
![]() (16)
(16)
���У�k1Ϊ����������ʽ(16)����ʽ(15)�������ɵã�
![]() (17)
(17)
�����ڿ�����(ʽ(16))�������£�ʽ(13)��ȫ��ָ���ȶ��ġ�Ȼ��x2����ʵ�ʵĿ������룬������������
![]() (18)
(18)
��ʽ(18)����ʽ(15)�����������ɵã�
![]() (19)
(19)
��ϵͳ(ʽ(12))����дΪ��
 (20)
(20)
����![]() ��
��
����LyapunovԤѡ����Ϊ��
![]() (21)
(21)
���У�![]() Ϊδ֪��ȷ����F�Ĺ���ֵ��
Ϊδ֪��ȷ����F�Ĺ���ֵ��
ѡȡһ��̬��ģ���Ƶ��л�����Ϊ��
![]() (22)
(22)
���У�c1Ϊ����������ʽ(22)��ʽ(20)�ĵ�1ʽ�ɵã�
![]() (23)
(23)
��V2��ʱ��������ʽ(23)���룬�����ɵã�
![]()
![]()
![]() (24)
(24)
��ʽ(22)�����������![]() ���ɵã�
���ɵã�
![]() (25)
(25)
����LyapunovԤѡ����Ϊ��
![]() (26)
(26)
��V3��ʱ�����ɵã�
![]()
![]()
![]() (27)
(27)
Ϊʹϵͳ�������ʼ״̬��������S��ʱ�������ģ���Ϊȫ�ֵ��ѡȡ������Ϊ��
![]() (28)
(28)
���У�ks��wsΪ��������sgn(x)�Ƿ��ź�������ʽ(28)�ã�ѡȡ��̬��ģ������vΪ��
![]()
![]() (29)
(29)
��ʽ(29)����ʽ(27)���ɵã�
![]()
![]() (30)
(30)
���F������Ӧ��Ϊ��
![]() (31)
(31)
��ʽ(31)����ʽ(30)�����У�
![]() (32)
(32)
ѡȡk��k1��c1��ks��wsΪ������������![]() ���������ڶ�̬��ģ������(ʽ(29))������Ӧ��(ʽ(31))�������£�ϵͳ(ʽ(20))��Lyapunov������ȫ��ָ���ȶ��ġ��Ӷ���֤��ϵͳ(ʽ(12))��ȫ��ָ���ȶ��ԡ��ɶ���1��֤��ԭϵͳ(ʽ(5))״̬
���������ڶ�̬��ģ������(ʽ(29))������Ӧ��(ʽ(31))�������£�ϵͳ(ʽ(20))��Lyapunov������ȫ��ָ���ȶ��ġ��Ӷ���֤��ϵͳ(ʽ(12))��ȫ��ָ���ȶ��ԡ��ɶ���1��֤��ԭϵͳ(ʽ(5))״̬![]() ����ȫ�ֽ���������0��
����ȫ�ֽ���������0��
2.2 �������������
���費ȷ������F=0������LyapunovԤѡ����Ϊ:
![]() (33)
(33)
��V4��ʱ��������(ʽ(20))�ĵ�2ʽ���룬�ɵã�
![]() (34)
(34)
Ϊʹ![]() �����״̬����������Ϊ:
�����״̬����������Ϊ:
![]() (35)
(35)
���У�k2Ϊ����������������(ʽ(35))����ʽ(34)�����У�
![]() (36)
(36)
��Ȼ���ڿ�����(ʽ(35))��������ϵͳ(ʽ(12))��ϵͳ���x1��x2��ȫ��ָ��������0����ԭϵͳ(ʽ(5))״̬![]() ��ȫ�ֽ����ȶ��ġ�
��ȫ�ֽ����ȶ��ġ�
2.3 ϵͳ�ȶ��Է���
������������ƹ��̺�Lyapunov�ȶ������ۿ�֪��ͨ���������Lyapunov����ʹϵͳָ�������ȶ�������ʵ�ֶ�ԭϵͳ��ȫ�ֽ�����ͬʱ�����ݻ�ģ�������ۣ���֤�������ȶ���ϵͳ��������ʱ���ڵ��ﻬģ���棬�Ӷ���֤����ϵͳ���ȶ��ԡ���ˣ��������£�
����2�����Ǵ��ڲ�ȷ����Ӱ���µĿ���ϵͳ(ʽ(12))���ڶ�̬��ģ������(ʽ(29))������Ӧ��(ʽ(31))�������£��ɱ�֤ϵͳ(ʽ(12))��ȫ��ָ���ȶ��ġ���ʵ���˶�Ƿ��������·�����ٿ���ϵͳ(ʽ(5))��ȫ�ֽ�����
֤������2.1�ڵ���ƹ��̵�֤��
��ǰ��Ŀ���ϵͳ�����У����������ٶ�uΪ������ͬʱ���Ժ����˶�![]() ��Ӱ�졣ʵ���ϴ����ڻ��������л���һ�����ٶ���ʧ���Һ����ٶ�
��Ӱ�졣ʵ���ϴ����ڻ��������л���һ�����ٶ���ʧ���Һ����ٶ�![]() ����һ���ı仯���ڿ��Ǻ����˶��������˶�Ӱ��ʱ��USV·�����ٵ���ѧģ�Ϳ�����Ϊ
����һ���ı仯���ڿ��Ǻ����˶��������˶�Ӱ��ʱ��USV·�����ٵ���ѧģ�Ϳ�����Ϊ
 (37)
(37)
�ڿ��Ǻ����˶�ʱ�������˶�ϵͳ![]() ���н������н�����ȶ���(BIBO)��
���н������н�����ȶ���(BIBO)��
֤������������ԤѡLyapunov������
![]() (38)
(38)
��V5��ʱ��������ʽ(37)�ĵ�2ʽ���룬�ɵã�
![]() (39)
(39)
![]() ��0����
��0����![]() ��
��![]() (40)
(40)
��ʽ(39)��֪�����V5�ǵݼ���������![]() Ҳ�ǵݼ�������ʽ(40)������
Ҳ�ǵݼ�������ʽ(40)������![]() ��
��![]() ʱ��V5�ǵݼ�������
ʱ��V5�ǵݼ�������
����2��֪��u��r�н磬�����![]() ����һ�������Ͻ�
����һ�������Ͻ�![]() /d22��
/d22��
����3����״̬����������(ʽ(35))�������£�ϵͳ(ʽ(12))��ȫ��ָ�������ȶ�������֤USV·�����ٿ���ϵͳ��ȫ�ֽ����ȶ��ԡ�
֤������2.2�ں�2.3�ڵ���ƹ��̵�֤��
3 �������ͷ���
���ڽ��з���Ա���������֤�������������Ч�ԡ�USV��ģ�ľ���������£�m11=200 kg��m22=250 kg��m33=80 kg��m2��d11=70 kg/s��d22=100 kg/s��d33=50 kg��m2/s��K=1��T=2��![]() �������г�ʼ״̬ȫȡΪ��x0=0��y=0��
�������г�ʼ״̬ȫȡΪ��x0=0��y=0��![]() ��u0=2 m/s��
��u0=2 m/s��![]() ��r0=0�����Ƕ�ǵĻ�е��������������-30��ܦġ�+30�㡣�����з�������Ӧ��̬��ģ��������Ϊ������1�����ݿ�������Ϊ������2��������1���Ʋ���ѡΪ��k=0.1��k1=0.1��c1=0.3��ks=0.01��ws=0.01��������2���Ʋ���ѡΪ��k=0.1��k1=0.1��k2=1��
��r0=0�����Ƕ�ǵĻ�е��������������-30��ܦġ�+30�㡣�����з�������Ӧ��̬��ģ��������Ϊ������1�����ݿ�������Ϊ������2��������1���Ʋ���ѡΪ��k=0.1��k1=0.1��c1=0.3��ks=0.01��ws=0.01��������2���Ʋ���ѡΪ��k=0.1��k1=0.1��k2=1��
���ȣ���������1�ֱ�Ӧ���ڼ�ģ�ͼ�ϵͳ(ʽ(5))���Ǽ�ģ�ͼ�ϵͳ(ʽ(37))�����з���Ա����飬�Ǽ�ģ��ʱ��������Ϊ��ֵFu=140 N��ά�ֺ��٣���������ͼ2��ʾ��
��ͼ2�ɼ���������1��2��ģ���о�ʹUSV���ٵظ����������켣��·������ƫ���������˥�����˶��켣�ͺ���ƫ�������˳���������ڷǼ�ģ���������ij�������˵����������Ӧ��̬��ģ�������������õ�����Ӧ�Ժ�³�����ܡ�ͼ2�г����÷Ǽ�ģ��ʱ���ٶ���Ӧ���ߣ������ٶȺ������ٶȵı仯�dz�С��������������������ϵͳ�ļ����ǿ��еġ�ͼ2�ж�����û�г��֡����������÷�����Ч��������ģ���Ƶġ��������⡣
���·����У��趨��Ǽ��ٶ�ͬ�����IJ�ȷ�������룺����ģ���Ϊ![]() ����������Ϊ
����������Ϊ![]() (��)/s2����̬��������2�ֿ������ڲ�ͬģ���µķ���Ա�����������ͼ3��4��ʾ��
(��)/s2����̬��������2�ֿ������ڲ�ͬģ���µķ���Ա�����������ͼ3��4��ʾ��
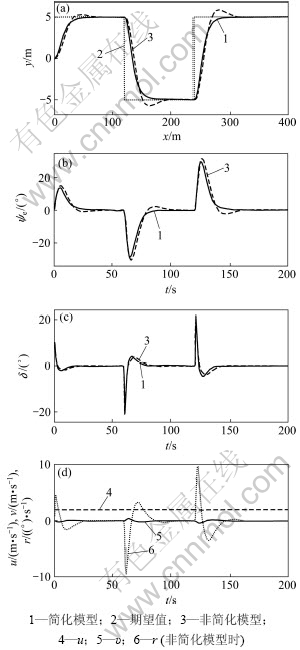
ͼ2 ��ͬģ���µ�ϵͳ״̬��Ӧ����
Fig.2 System state response curve under different models
��ͼ3�ɼ���2�ֿ����ɾ��ܱ�֤USVѸ�ٵ������������켣������Ч�����ơ���������2��һ���ij��������������ϴ�ͼ3��4�ɼ���������1�Ķ����ܹ�˳���������н�ǿ���Ƹ��ŵ�������
��ͼ4�ɼ�����ȻUSV����ѧģ�ͷ����ı䣬����2�ֿ����������£�USV��Ȼ���������趨�켣��ͬ������2��ȣ�������1���������졢������С��������1�Ķ������Ϲ�˳����С��û�г����������ɼ�������1�Ծ������õĿ������ܡ�����ԱȽ����������������Ӧ��̬��ģ��������ϵͳģ�ı������������Ӱ�첻���У��������õ�����Ӧ������³�����ܡ�
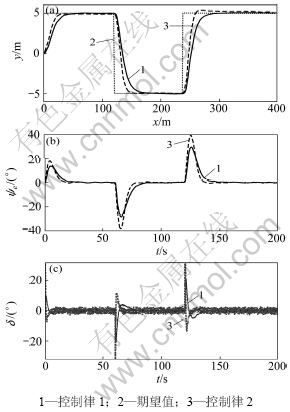
ͼ3 ��ͬ�������µ�ϵͳ״̬��Ӧ����(��ģ��)
Fig.3 System state response curve under different controllers (simplified model)
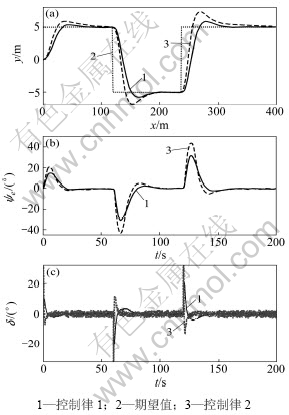
ͼ4 ��ͬ�������µ�ϵͳ״̬��Ӧ����(�Ǽ�ģ��)
Fig.4 System state response curve under different controllers (non-simplified model)
4 ����
(1) ����һ�����裬�ɽ�ԭ�������������ϵͳ��Ϊһ��������˫�����Ƿ����ϵͳ���ӷ����������ɿ�������ϵͳ�ļ����Ǻ������еġ�
(2) ���÷�������Ʒ���һ��̬��ģ���Ʒ������ϣ���Ʒ�������Ӧ��̬��ģ����������������֤���ÿ�������֤USV·������ϵͳ��ȫ�ֽ����ȶ��ԡ�
(3) ����Ա�����������ÿ��������нϺõĿ������ܡ�����Ӧ�Ժ�ǿ³���ԡ����۷����ͷ����������֤�˸ÿ��Ʒ�������Ч�ԡ�
�ο����ף�
[1] Jiang Z P. Global tracking control of underactuated ships by Lyapunov��s direct method[J]. Automatica, 2002, 38(2): 301-309.
[2] Do K D, Jiang Z P, Pan J. Underactuated ship global tracking under relaxed conditions[J]. IEEE Transactions on Automatic Control, 2002, 47(9): 1529-1536.
[3] Do K D, Jiang Z P, Pan J. Robust adaptive path following of underactuated ships[J]. Automatica, 2004, 40(6): 929-944.
[4] Lefeber E, Pettersen K Y, Nijmeijer H. Tracking control of an underactuated ship[J]. IEEE Transactions on Control Systems Technology, 2003, 11(1): 52-61.
[5] Breivik M, Fossen T I. Path following for marine surface vessels[C]//Proceeding of the MTTS/IEEE TECHNO-OCEAN. Kobe, Japan: IEEE Press, 2004: 2282-2289.
[6] Breivik M, Fossen T I. Principles of guidance-based path following in 2D and 3D[C]//Proceeding of the 44th IEEE Conference on Decision and Control. Seville, Spain: IEEE Press, 2005: 627-634.
[7] Lapierre L, Soetanto D, Pascoal A. Nonlinear path following with applications to the control of autonomous underwater vehicles[C]//Proceeding of the 42nd IEEE Conference on Decision and Control. Hawaii: IEEE Press, 2003: 1256-1261.
[8] Encarnacao P, Pascoal A, Arcak M. Path following for autonomous marine craft[C]//Proceedings of the 5th IFAC Conference on Maneuvering and Control of Marine Craft. Aalborg, Denmark: IFAC, 2000: 117-122.
[9] Skjetne R, Fossen T I. Nonlinear maneuvering and control of ships[C]//Proceedings of the Ocean MTS/IEEE Conference and Exhibition. Honolulu, USA: IEEE Press, 2001: 1808-1815.
[10] Do K D, Pan J. State and output-feedback robust path-following controllers for underactuated ships using Serret-Frenet frame[J]. Ocean Eng, 2004, 31(5/6): 587-613.
[11] ZHEN L, JING S, Soryeok O. Design, analysis and experimental validation of a robust nonlinear path following controller for marine surface vessels[J]. Automatica, 2009, 45(6): 1649-1658.
[12] Fossen T I. Marine control systems-guidance, navigation and control of ships, rigs and underwater vehicles[M]. Trondheim, Norway: Marine Cybernetics, 2002: 35-120.
[13] ����Ӻ. ����������[M]. ����: ������ҵ������, 2002: 30-39.
FAN Shang-yong. Ship maneuverability[M]. Beijing: National Defense Industry Press, 2002: 30-39.
[14] ����, �ĵ�, �ް�, ��. ���ڶ�Ŀ���Ż���ģ����ģ��ṹ���Ƽ�Ӧ��[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 37(6): 1149-1153.
YANG Yong, WEN Dan, LUO An, et al. Fuzzy sliding mode variable structure control based on multi-objective optimization and its application[J]. Journal of Central South University: Science and Technology, 2006, 37(6): 1149-1153.
[15] ������, ���´�, Ф��. ��ȷ��������ϵͳ�Ļ�ģ����Ӧ���������[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2005, 36(1): 174-178.
MA Bo-jun, FANG Yong-chun, XIAO Xiao. A sliding adaptive controller design for uncertain nonlinear system[J]. Journal of Central South University: Science and Technology, 2005, 36(1): 174-178.
[16] �ε, �ž���, ��ʤ��, ��. ��������Lyapunov���������Ĺ�ǰ�˺��ͳ����������[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2010, 41(6): 2196-2200.
REN Dian-bo, ZHANG Jing-ming, CUI Sheng-min, et al. Vehicle following control using front and back information based on vector Lyapunov function[J]. Journal of Central South University: Science and Technology, 2010, 41(6): 2196-2200.
[17] ���ӱ�, ����Ӣ, ����. 3-RRRT���������˽���ķ�������Ӧ��̬��ģ����[J]. ϵͳ����ѧ��, 2008, 20(14): 3633-3636.
LIU Yan-bin, HAN Xiu-ying, XU Hui. Decoupled backstepping adaptive dynamic sliding mode control of a 3-RRRT parallel robot[J]. Journal of System Simulation, 2008, 20(14): 3633-3636.
[18] ����, �ų�Ρ, ��ΰ, ��. ���ڶ�̬��ģ���Ƶ��ƶ�������·������[J]. �Ϸʹ�ҵ��ѧѧ��: ��Ȼ��ѧ��, 2009, 32(1): 28-31.
XU Yu-hua, ZHANG Chong-wei, BAO Wei, et al. Mobile robot��s path following based on dynamic sliding mode control[J]. Journal of Hefei University of Technology, 2009, 32(1): 28-31.
[19] ������, ��Ծ��. ����̬��ģ�������ƶ���е����������е�Ӧ��[J]. ����������Ӧ��, 2006, 23(3): 411-415.
WU Yu-xiang. HU Yue-ming. Second order dynamical sliding mode control and its application to output tracking of mobile manipulators[J]. Control Theory & Applications, 2006, 23(3): 411-415.
[20] ������. ��ģ��ṹ����MATLAB����[M]. ����: �廪��ѧ������, 2002: 240-247.
LIU Jin-kun. MATLAB simulation for sliding mode control[M]. Beijing: Tsinghua University Press, 2002: 240-247.
(�༭ ������)
�ո����ڣ�2011-05-10�������ڣ�2011-07-14
������Ŀ��������Ȼ��ѧ����������Ŀ(61004008)�������У��������ҵ���ר���ʽ�(HEUCFZ1003)
ͨ�����ߣ�������(1985-)���У������ˣ���ʿ�о���������Ƿ��������ˮ��ͧ���˶������о����绰��18903658103��E-mail: liaoyulei@hrbeu.edu.cn
ժҪ�����Ƿ����ˮ�洬��·�����ٿ���ϵͳ�����һ�ַ�������Ӧ��̬��ģ���Ʒ�������ϵͳ�ɴ�����ҡ��������Ӧģ�ͺ�Serret-Frenet����ѧ������ɣ������ǽ�ģ�������������Ȳ�ȷ���ԡ�������������ԭǷ����ϵͳ�Ŀ�������ת��Ϊ������ϵͳ�������⡣ͬʱ�����ڷ��������Ͷ�̬��ģ�������ۣ��������Ӧ��̬��ģ��������ͨ�����۷�����֤���ڸÿ����������£�·�����ٿ���ϵͳ��ȫ�ֽ����ȶ��ġ���������������ÿ�������ϵͳ�����㶯�������Ų����У�����ǿ³���Ժ�����Ӧ�ԡ�
