四旋翼飞行器的建模与姿态控制
曾小勇1, 2, 3,彭辉1, 3,吴军1, 3
(1. 中南大学 信息科学与工程学院,湖南 长沙,410083;
2. 长沙理工大学 电气与信息工程学院,湖南 长沙,410076;
3. 中南大学 先进控制与智能自动化湖南省工程实验室,湖南 长沙 410083)
摘要:对于具有多变量非线性耦合特性的四旋翼飞行器对象,以2种方法实现飞行姿态的实时控制。第1种方法是根据其运动学物理模型,利用线性二次型最优调节器(LQR)方法在线计算状态反馈控制率;第2种方法是基于数据驱动的方法,采用基于状态相依ARX模型描述对象的全局非线性动态过程,利用RBF神经网络逼近状态相依ARX(RBF-ARX)模型函数型系数,以状态信号量引导模型实时反映对象的局部特性,在递推得到多步向前预测状态空间RBF-ARX模型的基础上设计模型预测控制器。四旋翼飞行器实验装置的建模和实时控制效果验证了本文方法的可行性和有效性。
关键词:四旋翼飞行器;线性二次型调节器;RBF-ARX 模型;预测控制
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2013)09-3693-08
Modeling and attitude control for a quad-rotor aircraft
ZENG Xiaoyong1, 2, 3, PENG Hui1, 3, WU Jun1, 3
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
2. School of Electrical and Information Engineering, Changsha University of Science and Technology, Changsha 410076, China;
3. Hunan Engineering Laboratory for Advanced Control and Intelligent Automation, Central South University, Changsha 410083, China)
Abstract: Two methods were proposed for modeling and real attitude control of a quad-rotor which is multi-variable, nonlinear and coupled with each other. The first method used physical model according to the quad-rotor’s dynamical equation, and the linear quadratic regulator (LQR) was utilized for getting the state feedback controller online. The second method was based on real data, and a Gaussian radial basis function (RBF) neural networks-based state-dependent ARX (RBF-ARX) model was utilized to describe the global nonlinear dynamic process while the local characteristics of the quad-rotor were represented by the state signals, and the multi-step ahead RBF-ARX state space model-based predictive control was designed. The feasibility and effectiveness are demonstrated with a real time attitude control to the experimental quad-rotor.
Key words: quad-rotor aircraft; linear quadratic regulator (LQR); radial basis function (RBF) neural networks-based state-dependent ARX (RBF-ARX) model; predictive control
四旋翼飞行器是一种具有4个螺旋桨呈交叉对称结构的飞行器。与传统的直升机相比,四旋翼飞行器具有相对简单的机械结构,可通过改变其4个螺旋桨的速度来实现各种飞行动作,适宜于在复杂地形环境中或者比较狭小的空间中使用,该飞行器在搜救、航拍和侦察等方面具有广阔的应用前景[1-2];另一方面,由于四旋翼飞行器是典型的多变量、非线性耦合动态系统,对它的建模和相应的控制方法研究一直以来都是理论和应用研究的难点和热点问题。对于四旋翼飞行器的非线性动态过程的描述,近年来的研究主要侧重于2种方法:一种是根据四旋翼飞行器的物理结构和动力学平衡方程,通过一些必要的假设和近似,直接得到其物理模型[1-7];另一种是基于数据驱动的方法,通过实验方法获得某特定四旋翼飞行器足够的中间过程数据,然后,采用非线性时间序列建模的相关方法,获得对象的非线性辨识模型[8-15]。在控制方法上,对于不同的四旋翼飞行器对象模型和控制要求,控制方法呈多样性,如飞行姿态自适应稳定的PD2控制器[2]、结合滑模技术的飞行姿态的跟踪控制反馈控制器[3-7]、基于神经网络在线提供有限脉冲响应系数的PIλDμ控制器[8]、利用神经网络在线修正反馈控制率的智能控制器[9-12]、四旋翼飞行器的位置和姿态控制的非线性模型预测控制器[13-14]等。在此,本文作者针对实验室的四旋翼飞行器实际对象,采用2种不同的建模和控制方法实现了对飞行姿态的实时控制。首先根据四旋翼飞行器的物理结构和动力学特性建立对象的物理模型,并利用LQR方法获得控制器的状态反馈率,实现对飞行器姿态的稳定控制。然后,在此基础上进行实验,以获得基于数据驱动方法建模的辨识数据,建立对象的状态相依RBF-ARX模型,以描述对象的全局非线性动态过程。在每个采样时刻,该模型可通过状态信号量引导模型实时反映对象的局部特性,通过结构化非线性参数优化方法[16]离线辨识该模型后,设计一种模型预测控制器以实现对四旋翼飞行器的飞行姿态进行控制。最后,对四旋翼飞行器实验装置的建模和实时控制结果证明本文方法的可行性和有效性。
1 基于物理模型的LQR
1.1 四旋翼飞行器的物理模型
本文研究的四旋翼飞行实验装置如图1所示。
4个呈交叉对称结构排列的螺旋桨分别由4个电 机为飞行器提供动力,电机数据通过PCI卡实现与PC机的数据交换,在MATLAB的SIMULINK实时控制环境下对电机的电压进行实时控制。飞行器不同的飞行姿态是通过改变绕OY轴旋转的俯仰角(pitch);绕OX轴旋转的翻转角(roll)和绕OZ轴旋转的巡航角(yaw)来实现。显然,该四旋翼飞行器是一个四输入三输出的非线性耦合对象,其中输入为4个电机的输入电压,且由系统的硬件决定其约束为[-20,+20] V;输出为决定四旋翼飞行器飞行姿态的3个角度。
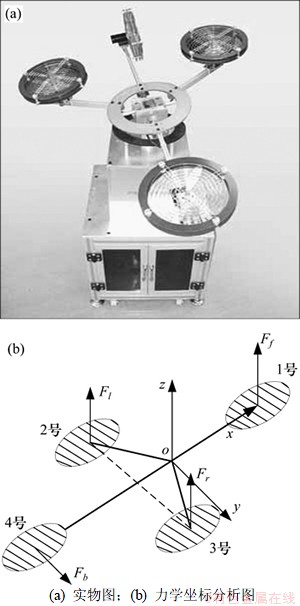
图1 四旋翼飞行器物理结构图
Fig.1 Physical structures of quad-rotor
为了得到对象的物理模型,定义前、左、右、后4个螺旋桨产生的力分别用Ff,Fl,Fr和Fb表示。根据图1所示的四旋翼飞行器物理结构,4个螺旋桨是一起对飞行姿态进行作用的,其中俯仰角是由Ff,Fl和Fr 3个力联合控制,翻转角是由Fl和Fr联合控制,巡航角是由Fb控制,可推导出四旋翼飞行器的物理模型为:
 (1)
(1)
其中: 为四旋翼飞行器3个输出绕各自对应坐标轴转动的转动惯量;
为四旋翼飞行器3个输出绕各自对应坐标轴转动的转动惯量; ,
, 和
和 分别为俯仰角、翻转角和巡航角的加速度;la为左右螺旋桨中心到OX轴的距离;lc为左右螺旋桨中心到OY轴的距离;lf为前螺旋桨中心到OY轴的距离;lb为后螺旋桨中心到OZ轴的距离;Kfc为电压到力的转换系数。根据图1所示的四旋翼飞行器物理结构和实际装置的动力学特点,取Kfc=13.8,lf=lb=0.325 m,Jp,Jr和Jy分别为0.995 8,0.553 1和1.539 6 kg・m2。
分别为俯仰角、翻转角和巡航角的加速度;la为左右螺旋桨中心到OX轴的距离;lc为左右螺旋桨中心到OY轴的距离;lf为前螺旋桨中心到OY轴的距离;lb为后螺旋桨中心到OZ轴的距离;Kfc为电压到力的转换系数。根据图1所示的四旋翼飞行器物理结构和实际装置的动力学特点,取Kfc=13.8,lf=lb=0.325 m,Jp,Jr和Jy分别为0.995 8,0.553 1和1.539 6 kg・m2。
1.2 基于物理模型的LQR设计
假设四旋翼飞行器在某个设定的飞行姿态取得稳定,对应的期望输出为 ,期望输入为
,期望输入为 。显然,Ys和Us需满足物理模型式(1),由此可推出:
。显然,Ys和Us需满足物理模型式(1),由此可推出:
 (2)
(2)
定义如下的状态量、输入量和输出量:
 (3)
(3)
由此可得到对象的状态空间描述:
 (4)
(4)
其中:
 ;
;
 ;
;
 。 (5)
。 (5)
定义LQR的优化目标为
 (6)
(6)
其中:Q和R为权重对角矩阵。通过求解如下RICCATI方程(7)就可以得到使目标函数J最小的控制量:
 (7)
(7)
最优控制率为
 (8)
(8)
当二次型优化目标J最小时,根据式(3)定义的状态变量,此时 ,
, ,即实际输出跟踪期望输出,输入趋向于稳定。
,即实际输出跟踪期望输出,输入趋向于稳定。
2 基于RBF-ARX模型的预测控制器
2.1 四旋翼飞行器的RBF-ARX模型
四旋翼飞行器的动态过程是非线性的。基于物理结构和动力学特性的物理模型除了需要精确测量相应的参数外,还需对一些复杂的过程进行近似,如电压和力的关系、不同飞行姿态下空气的阻力、机械摩擦力等。为了更准确地描述四旋翼飞行器的动态特性,可采用基于数据驱动的非线性建模方法。
对于一类多变量工作点时变的光滑非线性系统,可采用式(9)的离散非线性ARX模型来描述:

 (9)
(9)
其中: ,为输出;
,为输出; ,为输入;
,为输入; ,为白噪声序列。多种模型用以描述式(9)的非线性映射
,为白噪声序列。多种模型用以描述式(9)的非线性映射 ,一种有效的方法是采用状态相依ARX模型。
,一种有效的方法是采用状态相依ARX模型。

 (10)
(10)
其中: 是与采样时刻t相关的状态信号量。模型(10)可通过该状态信号量引导模型实时反映系统的动态过程,根据对象特性的不同,状态信号量可以是输入、输出或与它们相关的量;
是与采样时刻t相关的状态信号量。模型(10)可通过该状态信号量引导模型实时反映系统的动态过程,根据对象特性的不同,状态信号量可以是输入、输出或与它们相关的量; ,
,  和
和 为状态相依ARX模型的状态相依系数,可认为是以状态信号量为自变量的函数型系数。
为状态相依ARX模型的状态相依系数,可认为是以状态信号量为自变量的函数型系数。
尽管模型(10)为一类工作点时变的光滑非线性系统建模提供了一个很好的框架,但其关键问题是如何明确状态相依ARX模型的函数型系数。事实上,该问题可认为是从多维空间到一维空间的函数逼近问题。而RBF网络已从理论上证明只要具有足够的输入维数和节点,可以以任意精度逼近任何函数,因而可采用RBF网络来逼近模型(10)中的函数型系数,由此可得到RBF-ARX模型的组合模型。四输入三输出的四旋翼飞行器的RBF-ARX模型可表示为:

 (11a)
(11a)
 (11b)
(11b)
 (11c)
(11c)
 (11d)
(11d)
 (11e)
(11e)
 (11f)
(11f)
 (11g)
(11g)
 p为Y或U (11h)
p为Y或U (11h)
其中: ,为俯仰角、翻转角和巡航角的输出组合;
,为俯仰角、翻转角和巡航角的输出组合; ,为4个电机的输入电压;ka和kb分别为输入、输出的系统阶次;h和
,为4个电机的输入电压;ka和kb分别为输入、输出的系统阶次;h和 分别为RBF网络的节点数和输入向量维数;
分别为RBF网络的节点数和输入向量维数; 和
和 分别为RBF网络的中心向量和缩放因子;,和为由RBF网络逼近的状态相依函数型系数;
分别为RBF网络的中心向量和缩放因子;,和为由RBF网络逼近的状态相依函数型系数; 和
和 为RBF网络相应的阀值;
为RBF网络相应的阀值; 和
和 为RBF网络相应的权重;
为RBF网络相应的权重; 。
。
模型(11)是与状态信号量有关的四旋翼飞行器全局非线性ARX模型。当状态信号量为定值时,该模型即为局部线性ARX模型。可见:RBF-ARX模型具有全局非线性局部线性的特征,在每个采样时刻,模型(11)通过状态信号量的更新实时反映四旋翼飞行器的动态特性。RBF-ARX模型也局部线性化为一个伪线性模型,使得一些基于时变线性模型的模型预测控制方法可直接应用。模型(11)中状态信号量的选取非常关键,直接决定模型的性能和复杂程度,本文选取最能描述四旋翼飞行器飞行姿态非线性动态过程的俯仰角和翻转角的组合,即 。
。
可将模型(11a)~(11h)改写为如下矩阵多项式形式:
 (12)
(12)
定义如下状态变量:
 (13a)
(13a)
 (13b)
(13b)
 (13c)
(13c)
 (13d)
(13d)
 (13e)
(13e)
 (13f)
(13f)
 (13g)
(13g)
模型(11a)~(11h)和(12)则可以表示为如下状态空间形式:
 (14)
(14)
其中:
 (15)
(15)
 (16)
(16)
模型(14)中在t时刻的状态X(t)可由当前时刻的Y(t)、过去时刻的输入输出数据和通过一种结构化非线性参数优化方法(SNPOM)[15]离线估计的模型(11)得到,即不需要再使用状态观测器估计状态空间模型 (14)的状态。
2.2 基于RBF-ARX模型的预测控制器
模型(11),(12)和(14)为一步预测模型。为了设计基于RBF-ARX模型的预测控制器,需要推导出多步预测模型,为此定义如下向量:
 (17a)
(17a)
 (17b)
(17b)
 (17c)
(17c)
 (17d)
(17d)
 (17e)
(17e)
其中:N和Nu分别为预测时域和控制时域,且满足N≥Nu,从Nu到N时域内认为输入为Nu时刻的输入并保持不变; 和
和 分别表示t时刻的预测输出序列和期望输出序列。则系统的多步向前预测模型的状态空间描述为
分别表示t时刻的预测输出序列和期望输出序列。则系统的多步向前预测模型的状态空间描述为
 (18)
(18)
式(18)中,系数矩阵 ,
, ,
, ,
, 和
和 可通过式(14),(15)和(16)经递推得到。
可通过式(14),(15)和(16)经递推得到。
将递推多步向前预测状态空间模型(18)改写为如下形式:
 (19)
(19)
定义输入变化量序列 如下:
如下:
 (20)
(20)
并考虑如下的二次型优化目标:
 (21)
(21)
其中:Q,R1和R2为权重对角矩阵; 。将式(19)代入式(21)并推导可将该二次型优化问题变成为如下二次规划的形式:
。将式(19)代入式(21)并推导可将该二次型优化问题变成为如下二次规划的形式:
 (22)
(22)
其中:


 (23)
(23)
I为单位对角矩阵,其维数和输入变量维数一致。
优化问题式(22)可通过二次规划相关方法进行在线优化,仅使用最新时刻的优化输入作为控制输入。可以看出:基于离线估计的RBF-ARX模型是预测控制器的内部模型,在每一次优化过程中,控制器只需根据表征四旋翼飞行器飞行姿态动态特性的状态信号量简单计算出模型的函数型系数,避免了在线优化模型参数带来的很多问题。
3 四旋翼飞行器姿态实时控制结果
3.1 基于物理模型的LQR实时控制结果
结合状态向量的选择和实时控制效果,调节式(6)的LQR控制器权重系数,选取权重对角矩阵R的对角线元素均为0.5,权重对角矩阵Q的对角线元素依次为 。
。
图2和图3所示分别为基于四旋翼飞行器物理模型的LQR的飞行姿态实时控制输出和输入结果。由于四旋翼飞行器的水平飞行姿态是最敏感的姿态,此时, ,该姿态的变化最能反映控制器的性能。
,该姿态的变化最能反映控制器的性能。
3.2 基于RBF-ARX模型的预测控制实时控制结果
模型预测控制是基于预测模型的算法,模型的性能直接影响控制器的性能。为了验证RBF-ARX模型的有效性,在基于物理模型LQR控制的四旋翼飞行器上实时采样4 000个点用以训练和测试模型,采样周期为50 ms。图4所示为用于训练的输入输出结果。为了使RBF-ARX模型最大程度地反映局部动态信息且在全局范围内有效,数据必须尽可能在大范围内波动,同时,在局部迭加一定强度的白噪声信号以激发局部的动态信息。选取状态信号量
 ,并根据AIC确定RBF-ARX模型(11)的输入输出阶次ka和kb都为3,RBF网络的中心向量维数d=2,节点数m=1,利用一种快速收敛的SNPOM离线估计模型。
,并根据AIC确定RBF-ARX模型(11)的输入输出阶次ka和kb都为3,RBF网络的中心向量维数d=2,节点数m=1,利用一种快速收敛的SNPOM离线估计模型。
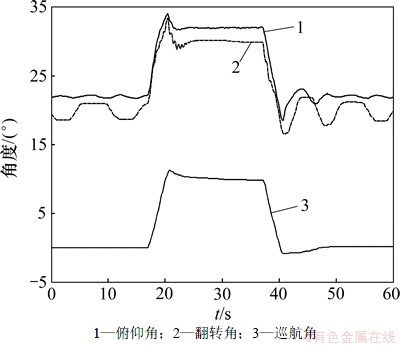
图2 基于物理模型的LQR实时控制输出结果
Fig.2 Real outputs of LQR based on physical model
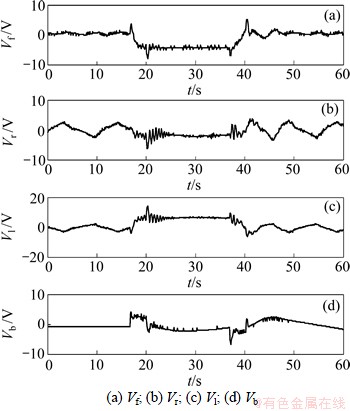
图3 基于物理模型的LQR实时控制输入结果
Fig.3 Real inputs of LQR based on physical model
图5所示为RBF-ARX模型对四旋翼飞行器测试数据的建模效果,模型较好地反映了对象的全局动态特性,建模误差在很小的范围内波动且成高斯状分布。基于离线估计的RBF-ARX模型是预测控制器的内模,调节预测控制器参数,选取N=30,Nu=10,输出加权对角阵 ,输入对角加权阵
,输入对角加权阵 ,
, 。图6和图7所示分别为基于RBF-ARX模型的四旋翼飞行器飞行姿态预测控制实时控制输出和输入结果。从图6和图7可以看出:在完成同一个飞行姿态的情况下,基于RBF-ARX模型的预测控制器比基于物理模型的LQR控制具有更小的超调且能更好地稳定在期望姿态,同时输入也约束在[-20,+20] V内。需说明的是:文中采用了50 ms的控制周期。由于预测控制中利用离线的模型估计方法,采用C语言编制程序,并在算法上尽量进行了简化,使得复杂的模型预测控制策略在50 ms的控制周期内实现。
。图6和图7所示分别为基于RBF-ARX模型的四旋翼飞行器飞行姿态预测控制实时控制输出和输入结果。从图6和图7可以看出:在完成同一个飞行姿态的情况下,基于RBF-ARX模型的预测控制器比基于物理模型的LQR控制具有更小的超调且能更好地稳定在期望姿态,同时输入也约束在[-20,+20] V内。需说明的是:文中采用了50 ms的控制周期。由于预测控制中利用离线的模型估计方法,采用C语言编制程序,并在算法上尽量进行了简化,使得复杂的模型预测控制策略在50 ms的控制周期内实现。
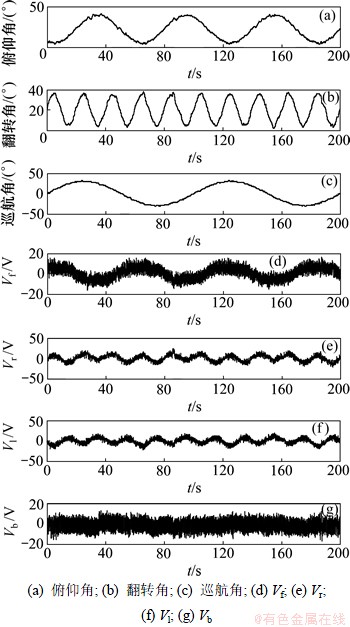
图4 四旋翼飞行器的训练数据
Fig.4 Training data of quad-rotor
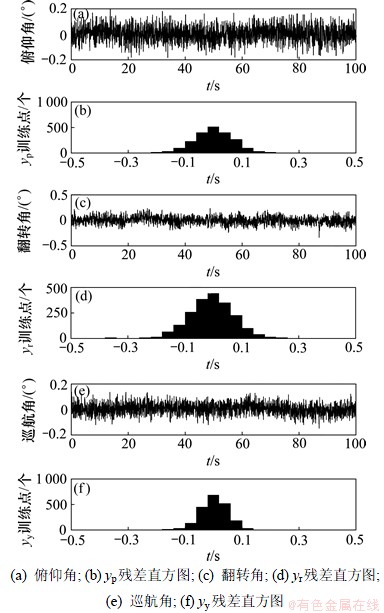
图5 RBF-ARX模型的建模效果
Fig.5 RBF-ARX modeling results
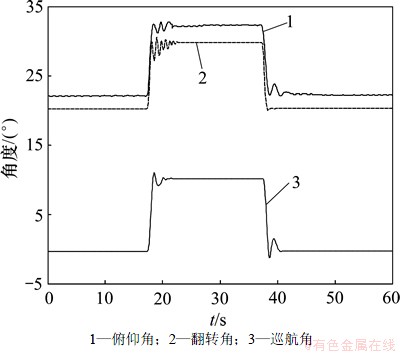
图6 基于RBF-ARX模型的预测控制实时输出结果
Fig.6 Real outputs of predictive controller based on RBF-ARX model

图7 基于RBF-ARX模型的预测控制实时输入结果
Fig.7 Real inputs of predictive controller based on RBF-ARX model
4 结论
(1) 根据四旋翼飞行器的物理结构和运动学平衡方程建立了对象的物理模型,并在此基础上设计了LQR控制器对四旋翼飞行器的飞行姿态进行控制。
(2) 利用状态相依ARX模型描述对象的全局动态特性,采用RBF网络逼近状态相依函数型系数,通过状态信号量引导模型实时转换,并采用结构化非线性参数优化方法离线估计模型参数,建立了四旋翼飞行器的全局非线性局部线性RBF-ARX模型。
(3) 递推得到RBF-ARX模型的多步向前预测状态空间模型,将其作为模型预测控制器的内模,设计了基于RBF-ARX模型的预测控制器,四旋翼飞行器飞行姿态的实际控制结果验证了本文方法的有效性。
参考文献:
[1] Hamel T, Mahony R, Lonano R, et al. Dynamic modeling and configuration stabilization for an X4-Flyer[C]// Proc IFAC World Congress. Barcelona, Spain, 2002: 336-384.
[2] Tayebi A, Mcgilvray S. Attitude stabilization of a fourrotor aerial robot aerial robot[C]// 43rd IEEE Conf Decision and Control. Atlantis, Bahamas, 2004: 1216-1221.
[3] Zhang R, Quan Q, Cai K Y. Attitude control of a quadrotor aircraft subject to a class of time-varying disturbances[J]. IET Control Theory Applications, 2011, 5(9): 1140-1146.
[4] Voos H. Nonlinear state-dependent Riccati equation control of a quadrotor UAV[C]// Proc IEEE Int Conf Control Appl. Munich, Germany, 2006: 2547-2552.
[5] Madani T, Benallegue A. Control of a quadrotor mini-helicopter via full state back-stepping technique[C]// Proc IEEE Conf Decision Control. San Diego, 2006: 1515-1520.
[6] Zuo Z. Trajectory tracking control design with command-filtered compensation for a quadrotor[J]. IET Control Theory Applications, 2010, 4(11): 2343-2355.
[7] Celik K, Chung S J, Clausman M, et al. Monocular vision SLAM for indoor aerial vehicles[C]// Proc IEEE Intell. St. Louis. MO, Robots Syst, 2009: 1566-1573.
[8] Efe M. Neural Network assisted computationally simple PIλDμ control of a quadrotor UAV[J]. IEEE Trans on Industrial Informatics, 2011, 7(2): 354-362.
[9] Voos H. Nonlinear and neural network-based control of a small fourrotor aerial robot[C]// Proc IEEE/ASME Int Conf Adv Intell. Mechatron, Zurich, 2007: 1-6.
[10] Dierks T, Jagannathan S. Output feedback control of a quadrotor UAV using neural networks[J]. IEEE Trans Neural Networks, 2010, 21(1): 50-23.
[11] Wu J, Peng H, Chen Q. RBF-ARX model-based modeling and control of quadrotor[C]// Proc IEEE International Conference on Control Applications. Yokohama, Japan, 2010: 1731-1736.
[12] Puttige V R, Anavatti S G. Comparison of real-time online and offline neural network models for a UAV[C]// Proc International Joint Conference on Neural Networks. Orlando, Florida, USA, 2007: 12-17.
[13] Alexis K, Nikolakopoulos G, Tzes A. Model predictive control scheme for the autonomous flight of an unmanned quadrotor[C]// Prec IEEE Int Conf Ind Technol. Gdansk, 2011: 2243-2248.
[14] Alexis K, Papachristos C, Nikolakopoulos G, et al. Model predictive quadrotor indoor position control[C]// Proc 19th Mediterranean Conference on Control and Automation, Aquis Corfu Holiday Palace. Corfu, Greece, 2011: 1247-1255.
[15] Peng H, Ozaki T, Haggan-Ozaki V, et al. A parameter optimization method for radial basis function type models[J]. IEEE Transaction on Neural Networks, 2003, 14(2): 432-438.
(编辑 陈灿华)
收稿日期:2012-09-10;修回日期:2012-11-23
基金项目:国家国际科技合作计划项目(2011DFA10440);国家自然科学基金资助项目(71271215);湖南省科技厅科技计划项目(2006GK3158);湖南省教育厅项目(1200021);“电力系统安全运行与控制”湖南省重点实验室开放基金资助项目(2011KFJJ07)
通信作者:彭辉(1963-),男,湖南长沙人,教授,博士生导师,从事复杂非线性系统的建模与优化控制研究;电话:0731-88830642;E-mail: huipeng@csu.edu.cn

