DOI: 10.11817/j.issn.1672-7207.2019.03.010
一种基于内外环结构的四旋翼飞行器容错控制方法
郑佳静,李平
(华侨大学 信息科学与工程学院,福建 厦门,361021)
摘要:采用内外环结构来避免直接设计四旋飞机的欠驱动控制律,内外环结构以位置子系统作为外环,姿态子系统作为内环。首先,通过反步法逐步递推得到子系统的控制输入,通过该控制输入,一方面,可推导出内环横滚角与俯仰角的期望值,另一方面,可计算得出欠驱动控制律。以推导出的横滚角和俯仰角期望值以及给定的偏航角期望值作为姿态的目标轨迹,通过反步法进一步设计得出相应的姿态控制律。考虑到执行器可能会发生故障,采用自适应方法分别对内环和外环的故障进行估计,从而实现四旋翼飞行器的容错控制设计。相比于直接设计方法,本文方法得到的欠驱动控制律结构简单,且能实现对执行器故障的容错。研究结果表明:四旋翼飞行器在执行器故障下仍能实现位置和姿态的稳定跟踪,验证了所得控制律的有效性。
关键词:四旋翼飞行器;执行器故障;内外环结构;自适应;反步法;容错控制
中图分类号:V249.122+.3 文献标志码:A 文章编号:1672-7207(2019)03-0572-07
A fault tolerant control method for quadrotor based on inner and outer loops
ZHENG Jiajing, LI Ping
(College of Information Science and Engineering, Huaqiao University, Xiamen 361021, China)
Abstract: Inner and outer loops structure was adopted to avoid direct design of the under-actuated control laws of quadrotor, the position subsystem was the outer loop and attitude subsystem was the inner loop. First, the control inputs of position subsystem were recursively obtained by backstepping method, according to which the desired roll and pitch angles were derived and the under-actuated control law was calculated. The corresponding attitude control laws were further designed by backstepping using the target trajectory of attitude, which included the derived desired roll and pitch angles and the given desired yaw angle. Considering actuator faults, adaptive method was used to estimate faults of the inner and outer loops to realize the fault tolerant control for quadrotor. Compared with the direct design, the structure of under-actuated control law was simple and could achieve actuator fault tolerance. The results show that the quadrotor can still realize the steady tracking of position and attitude with actuator faults, which proves the effectiveness of obtained control laws.
Key words: quadrotor; actuator fault; inner and outer loop structure; adaptive; backstepping; fault tolerant control
四旋翼飞行器已经成为当今系统研究的热门领域,个人、企业、政府、科研机构等都对其开展了大量的研究。由于四旋翼飞行器能够实现垂直起降,具有结构简单、飞行姿态多样、噪声低等特点,在军事领域和民用领域都扮演着重要角色,如抗震救灾、农业保值、特高压线路巡视、汽车电子、导航控制等。随着四旋翼飞行器要执行的任务更加多样化、飞行环境更加复杂化,电机和螺旋桨将持续处于高速旋转的状态,这大大增加了它们发生故障的可能性。为了保证四旋翼飞行器能够安全飞行,避免发生故障,容错控制技术的研究受到越来越多的关注。贺有智等[1]考虑电机出现故障的3种不同情形下,结合积分反演控制技术和时延控制(TDC)技术对上一个系统状态进行迭代,进而逼近和补偿四旋翼无人机执行机构的故障信息;郝伟等[2-5]针对四旋翼飞行器姿态系统发生的执行器部分失效问题,提出了自适应容错控制;张友民等[6-7]基于滑模控制技术,通过四旋翼飞行器的飞行实验证明了主动容错控制的鲁棒性比被动容错控制的好;李炜等[8-11]通过建立四旋翼飞行器正常和各种故障下的模型以及相应的控制律构成的模型集合库,根据系统模型失配度匹配故障模型,并调取相应的控制律进行容错控制。还有许多研究利用观测器实现对故障的诊断与重构,如杨蒲等[12]对系统进行线性变换,然后利用滑模观测器和等效输出注入的概念对故障进行重构;宫勋等[13]提出了一种基于状态观测器技术的故障诊断方法,并对其鲁棒性与快速性进行了理论分析。对于四旋翼飞行器系统的控制结构,聂博文等[14-17]将控制器分为针对全驱动子系统(z,Ψ)设计的全驱动控制器(u1, u4)和针对欠驱动子系统(x-θ, y-φ)设计的欠驱动控制器(u3, u2)。在这种控制结构下,由于四旋翼飞行器的欠驱动特性及其位姿之间的强耦合,欠驱动控制律设计复杂。为了避免欠驱动控制律的直接设计,本文作者选择内外环结构进行容错控制研究。整个控制系统分为外环的位置子系统和内环的姿态子系统,获得的欠驱动控制律更简洁,在实际飞行控制中更易实现。考虑到执行器发生故障,本文作者采用自适应算法重构故障,进而实现四旋翼飞行器的容错控制设计。
1 四旋翼飞行器的动态模型
1.1 飞行原理
四旋翼飞行器是具有6自由度的刚体。在2根垂直分布的连杆上分布4个螺旋桨,由4个独立电机分别驱动。4个螺旋桨旋转产生4个向上的升力,它们可使四旋翼飞行器进行不同模式的空间运动。四旋翼飞行器的结构如图1所示。
图1中,Oi-xi-yi-zi表示惯性坐标系,Ob-xb-yb-zb表示机体坐标系。4个螺旋桨的升力分别为F1,F2,F3与F4。杆1上的螺旋桨1和螺旋桨3为1组,逆时针旋转,杆2上的螺旋桨2和螺旋桨4为1组,顺时针旋转。当螺旋桨2和螺旋桨4之间存在速度差时,机体绕着x轴产生横滚角φ∈(-π/2, π/2)。当螺旋桨1和螺旋桨3转速不相等时,机体绕着y轴产生俯仰角θ∈(-π/2, π/2)。当逆时针和顺时针旋转的2组角速度不等时,机体就会绕着z轴往角速度较小的那组旋转方向偏航,产生偏航角Ψ∈(-π, π)。所以,四旋翼的飞行可以解耦成沿着机体轴的平移运动和绕着机体轴的旋转运动。从机体坐标系到惯性坐标系的旋转变换矩阵R如下式所示[18](其中c(・)和s(・)分别为cos(・)和sin(・)的缩写):
 (1)
(1)
1.2 运动学方程
为了实现四旋翼飞行器的自主飞行控制,首先要获得其动态模型。[x,y,z]T为惯性坐标系下四旋翼的位置,[φ,θ,Ψ]T为惯性坐标系下的欧拉角。根据牛顿第二定律,有
 (2)
(2)
式中:a为线加速度; 为合外力;m为四旋翼飞行器的质量。由于四旋翼飞行器的结构对称,在体坐标系中沿着z轴方向的升力之和即位置[x,y,z]T的控制作用为
为合外力;m为四旋翼飞行器的质量。由于四旋翼飞行器的结构对称,在体坐标系中沿着z轴方向的升力之和即位置[x,y,z]T的控制作用为
 (3)
(3)
 (4)
(4)
式中:Fi(i=1,2,3,4)分别为4个螺旋桨垂直向上的升力; b为升力系数; (i=1,2,3,4)为4个螺旋桨的转速。惯性坐标系下沿3个轴的线加速度
(i=1,2,3,4)为4个螺旋桨的转速。惯性坐标系下沿3个轴的线加速度 ,
, 和
和 为[19]
为[19]
 (5)
(5)
式中:g为重力加速度;Ki(i=1,2,3)为阻力系数;机体沿各轴的线速度为 。从式(5)可以看到:四旋翼飞行器的位置子系统具有3个自由度,却只有1个独立的控制变量u1,显然表明其具有欠驱动特性。将位置动态中姿态的耦合作用和位置控制作用u1构造成3个控制输入:u1x=u1(cosφsinθcosΨ+sinφsinΨ)/m,u1y=u1(cosφsinθsinΨ-sinφcosΨ)/m,u1z=u1(cosφcosθ)/m。考虑四旋翼飞行器在室内或者无风条件下飞行时,位置子系统发生执行器故障。由于此时4个螺旋桨的升力发生改变,直接影响四旋翼飞行器的飞行高度,再将其变换到地面坐标系下,可得到线运动的运动学方程(位置故障对象):
。从式(5)可以看到:四旋翼飞行器的位置子系统具有3个自由度,却只有1个独立的控制变量u1,显然表明其具有欠驱动特性。将位置动态中姿态的耦合作用和位置控制作用u1构造成3个控制输入:u1x=u1(cosφsinθcosΨ+sinφsinΨ)/m,u1y=u1(cosφsinθsinΨ-sinφcosΨ)/m,u1z=u1(cosφcosθ)/m。考虑四旋翼飞行器在室内或者无风条件下飞行时,位置子系统发生执行器故障。由于此时4个螺旋桨的升力发生改变,直接影响四旋翼飞行器的飞行高度,再将其变换到地面坐标系下,可得到线运动的运动学方程(位置故障对象):
 (6)
(6)
式中:fa1表示执行器故障变量。之所以将故障表示在z轴方向,是因为执行器发生故障会直接影响其上升的合力和姿态,而z轴上的高度变化和姿态角的变化会进一步改变飞行器在x轴和y轴上的位置,故这里考虑执行器的故障效果是对z轴上的合外力产生1个偏移量fa1,将故障变量fa1加在z轴方向上。经过由机体坐标系到地面坐标系的转换,并应用牛顿第二定律中合外力与加速度之间的关系,可以将故障信号表示为式(6)的形式。
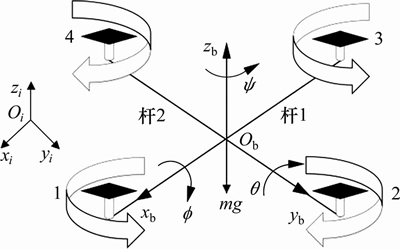
图1 四旋翼飞行器的结构
Fig. 1 Structure of quadrotor
根据角动量定理[20],绕着3个轴旋转的力矩为
 (7)
(7)
式中:Ix,Iy与Iz分别为机体绕x,y和z轴的转动惯量;l为每个螺旋桨与机体中心的距离;c为正的比例系数;u2=F4-F2, u3=F3-F1, u4=d(-F1+F2-F3+F4)/b均为姿态角[φ,θ,Ψ]T的控制作用;d为力-力矩比例因子;Jr为螺旋桨的转动惯量;Ωr=Ω1-Ω2+Ω3-Ω4为整体的转子角速度;Kj(j=4,5,6)为阻力系数;机体绕各轴的角速度为 。以上等式的右边从左到右分别表示机体的陀螺效应、气动力矩、转子的陀螺效应(z轴为零)和阻力力矩。仍然考虑在室内或无风条件下,姿态子系统发生执行器故障,由于螺旋桨质量很小,可忽略转子的陀螺效应。因此,由式(7)可得角运动的运动学方程(姿态故障对象)为
。以上等式的右边从左到右分别表示机体的陀螺效应、气动力矩、转子的陀螺效应(z轴为零)和阻力力矩。仍然考虑在室内或无风条件下,姿态子系统发生执行器故障,由于螺旋桨质量很小,可忽略转子的陀螺效应。因此,由式(7)可得角运动的运动学方程(姿态故障对象)为
 (8)
(8)
式中:fa2,fa3与fa4为姿态执行器故障变量。
2 内外环的容错控制设计
内外环控制结构见图2,其中,xd,yd和zd分别为变量x,y和z的期望。当四旋翼飞行器发生执行器故障时,对于外环的位置子系统,欠驱动容错控制律u1不是直接设计的,而是通过3个分别由反步法设计的控制输入u1x,u1y与u1z计算得到。外环为内环提供期望的俯仰角θd和横滚角φd。对于内环的姿态子系统,姿态容错控制律u2,u3,u4也由反步法设计得到。设计中结合了自适应方法对故障信息进行估计,以便进行故障调节。
首先介绍位置子系统的容错控制设计。以u1z为例介绍反步法容错控制设计的具体步骤。
步骤1:定义z1为z的跟踪误差变量,z2为虚拟误差变量。
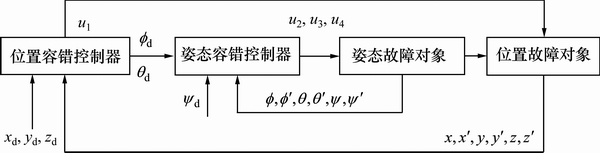
图2 基于内外环的控制结构
Fig. 2 Control structure based on inner and outer loops
 (9)
(9)
 (10)
(10)
式中:zd为变量z的期望; 为z的一阶导数,表示沿z轴方向的线速度;
为z的一阶导数,表示沿z轴方向的线速度; 为虚拟控制变量。
为虚拟控制变量。
将式(10)代入式(9),得
 (11)
(11)
选择李雅普诺夫候选函数V1,即

 (12)
(12)
对V1进行求导,得
 (13)
(13)
为了确保 <0始终成立,令
<0始终成立,令
 (14)
(14)
式中:c1为正常数。因此,式(13)可以写成
 (15)
(15)
式(15)中的符号不确定项z1z2将在下一步进行处理。
步骤2:定义 为实际故障fa1的估计误差,其中
为实际故障fa1的估计误差,其中 表示故障的估计值。本文假设故障fa1为一常数,则有
表示故障的估计值。本文假设故障fa1为一常数,则有 。
。
选择李雅普诺夫候选函数V2为
 (16)
(16)
式中:γ1为正常数。对V2进行求导,得
 (17)
(17)
由式(6)和式(10)可知z2的导数 为
为
 (18)
(18)
其中,由式(14)可知α1的导数 为
为
 (19)
(19)
将式(18)与式(19)代入式(17),得

 (20)
(20)
为了确保 <0始终成立,变量z的控制输入u1z可设计为
<0始终成立,变量z的控制输入u1z可设计为
 (21)
(21)
式中:c2为正常数。自适应律设计如下:
 (22)
(22)
参考以上对u1z的反步法设计步骤,变量x和y的控制输入u1x和u1y分别设计为:
 (23)
(23)
 (24)
(24)
式中:c3,c4,c5和c6均为正常数。
由设计得到的3个控制输入可得期望的俯仰角 和横滚角
和横滚角 ,并且可计算得到欠驱动控制律(位置容错控制律)u1,即
,并且可计算得到欠驱动控制律(位置容错控制律)u1,即
 (25)
(25)
 (26)
(26)
 (27)
(27)
由式(27)可以看出:欠驱动控制律(位置容错控制律)u1由计算得到,结构简单,易于实现。
对于姿态故障子系统的控制设计,定义zi(i=7,9,11)分别为姿态 ,
, ,
, 的跟踪误差变量;zj(j=8,10,12)为虚拟误差变量;,与
的跟踪误差变量;zj(j=8,10,12)为虚拟误差变量;,与 分别为这3个姿态角的期望。根据式(8)的姿态故障对象不难设计相应的姿态反步容错控制器。具体步骤与位置环的容错控制步骤相同,设计的3个姿态容错控制律为:
分别为这3个姿态角的期望。根据式(8)的姿态故障对象不难设计相应的姿态反步容错控制器。具体步骤与位置环的容错控制步骤相同,设计的3个姿态容错控制律为:
 (28)
(28)
 (29)
(29)
 (30)
(30)
式中:c7,c8,c9,c10,c11与c12均为正常数。相应的自适应律设计为:
 (31)
(31)
 (32)
(32)
 (33)
(33)
式中:γi(i=2,3,4)均为正常数。
综上可知,考虑带有执行器故障的四旋翼飞行器系统,其位置和姿态子系统的动态特性分别由式(6)和式(7)给出。基于内外环结构对该系统进行容错控制设计,分别得出如式(27)所示的位置子系统容错控制器和如式(28)~(30)所示的姿态子系统容错控制器,结合式(22)和式(31)~(33)给出的自适应律,所得容错控制器能够使四旋翼飞行器系统在执行器故障情况下保持闭环稳定性,并使相应的位置和姿态变量都能跟踪各自的设定值。
3 仿真结果
结合四旋翼飞行器的位置故障模型和姿态故障模型以及位置容错控制器和姿态容错控制器,在Matlab/Simulink平台上搭建内外环结构。四旋翼飞行器相关的模型参数见表1。
表1 四旋翼飞行器模型参数
Table 1 Model parameters for quadrotor
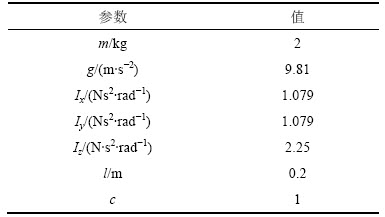
设置四旋翼飞行器初始位置为[0,0,0,]T m,在0 s时的期望位置为[0.6,0.6,0.6]T m。当t=10 s时,在z=0.6 m的高度作1个边长为0.3 m的正方形运动,并且于50 s开始降落到期望位置[0.6,0.6,0]T m。初始的姿态角设置为[0,0,0]T rad,并且在飞行过程中,偏航角始终保持Ψd=0.5 rad,并在t=60 s恢复到0 rad。
假设在t=10 s时四旋翼飞行器发生执行器故障,取fai(i=1,2,3,4)=10,容错控制器参数c1=c2=c3=c4=2,c5=c6=c11=c12=10,c7=c8=c9=c10=3,自适应律参数γ1=γ4=20,γ2=γ3=100,仿真时间为80 s,仿真结果如图3~8所示。
由图3可见:实际执行器故障函数fa1~fa4可以被较准确地重构, ,说明所设计自适应算法的有效性。其中
,说明所设计自适应算法的有效性。其中 和
和 曲线分别在50 s和60 s时出现小幅度的超调,原因在于四旋翼飞行器分别在t=50 s和t=60 s时,高度和偏航角的期望发生了变化。图4所示为四旋翼飞行器3个轴向[x,y,z]T的位置跟踪曲线,图5所示为姿态
曲线分别在50 s和60 s时出现小幅度的超调,原因在于四旋翼飞行器分别在t=50 s和t=60 s时,高度和偏航角的期望发生了变化。图4所示为四旋翼飞行器3个轴向[x,y,z]T的位置跟踪曲线,图5所示为姿态 跟踪曲线,整个飞行过程能稳定跟踪期望的位置
跟踪曲线,整个飞行过程能稳定跟踪期望的位置 和姿态
和姿态 信号。另外,位姿曲线在10 s时都略微受执行器故障的影响,但最终都能较快地恢复稳定跟踪,体现了所设计的容错控制器能对执行器故障进行有效且及时的容错。图6和图7所示分别为实时的线速度[u,v,w]T与角速度[p,q,r]T曲线。四旋翼飞行器完整的空间运动轨迹如图8所示。
信号。另外,位姿曲线在10 s时都略微受执行器故障的影响,但最终都能较快地恢复稳定跟踪,体现了所设计的容错控制器能对执行器故障进行有效且及时的容错。图6和图7所示分别为实时的线速度[u,v,w]T与角速度[p,q,r]T曲线。四旋翼飞行器完整的空间运动轨迹如图8所示。
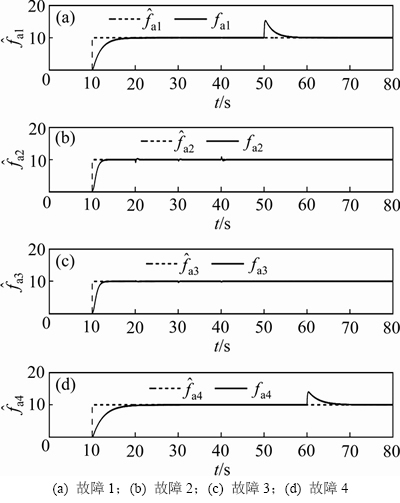
图3 自适应故障估计
Fig. 3 Adaptive fault estimation
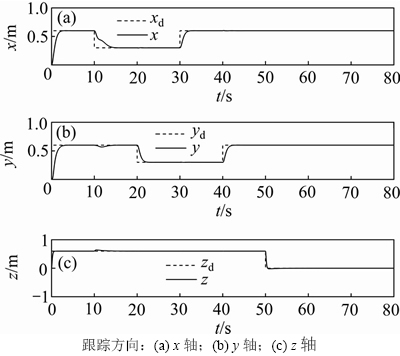
图4 位置跟踪
Fig. 4 Position tracking
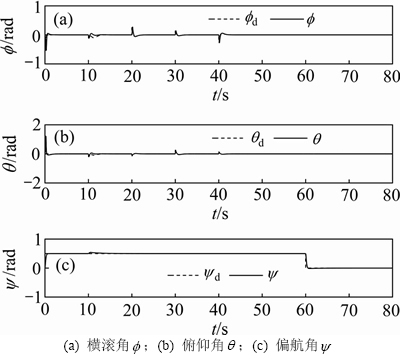
图5 姿态跟踪
Fig. 5 Attitude tracking
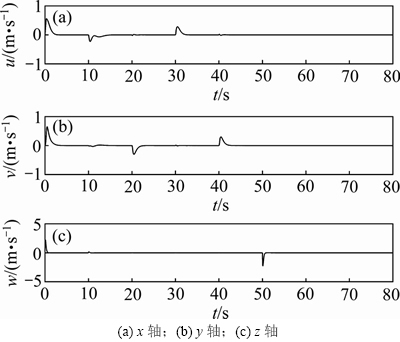
图6 线速度曲线
Fig. 6 Linear velocity curves
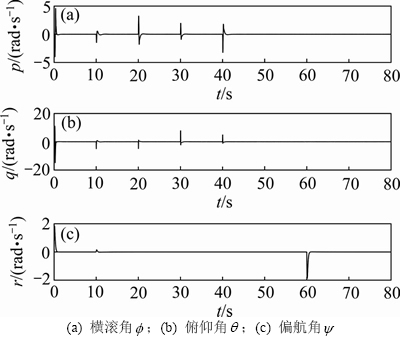
图7 角速度曲线
Fig. 7 Angular velocity curves
四旋翼飞行器完整的空间运动轨迹如图8所示。由于开始飞行10 s之后受到执行器故障的影响,四旋翼飞行器的跟踪偏离期望轨迹,但在容错控制器的作用下四旋翼飞行器又恢复稳定跟踪,最终完成预设任务。
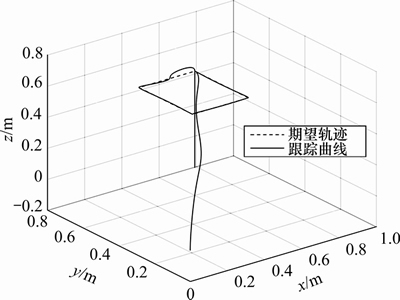
图8 空间运动轨迹
Fig. 8 Space movement trajectory
4 结论
1) 结合自适应算法能够对执行器故障信息进行较准确重构。
2) 由反步方法得到的位置环和姿态环的容错控制器能够补偿执行器故障,从而实现故障下四旋翼飞行器位置和姿态的稳定跟踪。
3) 内外环结构下,所得欠驱动律的控制性能良好,结构简单,更易于实现。
参考文献:
[1] 贺有智, 刘同其. 四旋翼飞行器时延积分反演容错控制[J]. 系统工程与电子技术, 2015, 37(10): 2341-2346.
HE Youzhi, LIU Tongqi. Time delay integral inversion fault- tolerant control of quadrotor aircraft[J]. System Engineering and Electronic Technology, 2015, 37(10): 2341-2346.
[2] 郝伟, 鲜斌. 四旋翼无人机姿态系统的非线性容错控制设计[J]. 控制理论与应用, 2015, 32(11): 1457-1463.
HAO Wei, XIAN bin. Nonlinear fault-tolerant control design of four rotor UAV attitude system[J]. Control Theory and Application, 2015, 32(11): 1457-1463.
[3] 范佳明. 四旋翼飞行器容错控制研究[D]. 天津: 天津工业大学电气工程与自动化学院, 2017: 19-32.
FAN Jiaming. Fault tolerant control study of quadrotor[D]. Tianjin: Tianjin Polytechnic University. College of Electrical Engineering and Automation, 2017: 19-32.
[4] NGUYEN D T, SAUSSI D, SAYDY L. Robust self-scheduled fault-tolerant control of a quadrotor UAV[J]. IFAC-Papers OnLine,2017, 50(1): 5761-5767.
D, SAYDY L. Robust self-scheduled fault-tolerant control of a quadrotor UAV[J]. IFAC-Papers OnLine,2017, 50(1): 5761-5767.
[5] 鲜斌, 郝伟. 针对四旋翼无人机执行器部分失效的容错控制方法: 中国, CN10374421.5[P]. 2015-10-07.
XIAN Bin, HAO Wei. Fault tolerant control method for actuator partial failure of quadrotor UAV: China, CN10374421.5[P]. 2015-10-07.
[6] 张友民, 余翔, 王斑, 等. 四旋翼无人系统的容错控制算法设计与实现[J]. 控制工程, 2016, 23(12): 1874-1882.
ZHANG Youmin, YU Xiang, WANG Ban, et al. Design and implementation of fault-tolerant control algorithms for an unmanned quadrotor system[J]. Control Engineering, 2016, 23(12): 1874-1882.
[7] LI Tong, ZHANG Youmin, GORDON B W. Nonlinear fault-tolerant control of a quadrotor UAV based on sliding mode control technique[J]. IFAC Proceedings Volumes, 2012, 45(20): 1317-1322.
[8] 李炜, 崔佳佳. 基于多模型的无人机故障诊断与容错控制方法[J]. 山东科技大学学报(自然科学版), 2017, 36(4): 9-15.
LI Wei, CUI Jiajia. Fault diagnosis and fault tolerant control method of UAV based on multi model[J]. Journal of Shandong University of Science and Technology(Natural Science), 2017, 36(4): 9-15.
[9] 徐雪松. 四旋翼无人机的多模型故障诊断[J]. 计算机工程与应用, 2016, 52(21): 252-257.
XU Xuesong. Multi model fault diagnosis of quadrotor[J]. Computer Engineering and Application, 2016, 52(21): 252-257.
[10] BOSKOVIC J, LI S M, MEHRA R. Evaluation of the properties of a multiple-model reconfigurable flight controller on a 6 DOF simulation[C]// AIAA Guidance, Navigation, and Control Conference and Exhibit. Denver, America: American Institute of Aeronautics and Astronautics, 2013: 2514-2525.
[11] 殷芝霞. 四旋翼直升机多故障系统故障诊断与容错技术研究[D]. 南京: 南京航空航天大学自动化学院, 2013: 12-31.
YIN Zhixia. Fault diagnosis and fault tolerance research on quadrotor helicopter multi fault system[D]. Nanjing: Nanjing University of Aeronautics & Astronautics. College of Automation, 2013: 12-31.
[12] 杨蒲, 潘旭, 刘剑慰, 等. 一种基于滑模观测器的四旋翼飞行器的主动容错控制方法: 中国, CN10776314.5[P]. 2016-02-24.
YANG Pu, PAN Xu, LIU Jianwei, et al. An active fault tolerant control method for quadrotor aircraft based on sliding mode observer: China, CN10776314.5[P]. 2016-02-24.
[13] 宫勋, 王丽. 四旋翼飞行器的容错姿态稳定控制[J]. 电光与控制, 2014, 21(7): 14-18.
GONG Xun, WANG Li. Fault-tolerant attitude stabilization control of four rotor aircraft[J]. Electro-Optic and Control, 2014, 21(7): 14-18.
[14] 聂博文. 微小型四旋翼无人直升机建模及控制方法研究[D]. 长沙: 国防科学技术大学信息系统与管理学院, 2006: 17-32.
NIE Bowen. Research on modeling and control method of micro quadrotor unmanned helicopter[D]. Changsha: National Defense University of Science and Technology. College of Information Systems and Management, 2006: 17-32.
[15] 王大伟, 高席丰. 四旋翼无人机滑模轨迹跟踪控制器设计[J]. 电光与控制, 2016, 23(7): 55-58.
WANG Dawei, GAO Xifeng. Sliding mode trajectory tracking controller design for quadrotor[J]. Electro-Optic and Control, 2016, 23(7): 55-58.
[16] XIONG Jingjing, ZHANG Guobao. Global fast dynamic terminal sliding mode control for a quadrotor UAV[J]. ISA Transactions, 2017, 66: 233-240.
[17] 滕雄, 吴怀宇, 陈洋, 等. 基于反步法的四旋翼飞行器轨迹跟踪研究[J]. 计算机仿真, 2016, 33(5): 78-83.
TENG Xiong, WU Huaiyu, CHEN Yang, et al. Research on trajectory tacking of quadrotor based on backstepping[J]. Computer Simulation, 2016, 33(5): 78-83.
[18] 杨立本, 章卫国, 黄得刚. 基于ESO的欠驱动四旋翼飞行器轨迹鲁棒控制[J]. 系统工程与电子技术, 2015, 37(9): 2102-2108.
YANG Liben, ZHANG Weiguo, HUANG Degang. Trajectory robust control of underactuated quadrotor aircraft based on ESO[J]. System Engineering and Electronic Technology, 2015, 37(9): 2102-2108.
[19] ZHENG Enhui, XIONG Jingjing, LUO Jiliang. Second order sliding mode control for a quadrotor UAV[J]. ISA Transactions, 2014, 53(4): 1350-1356.
[20] 张益鹏. 四旋翼无人机自适应控制与故障容错[D]. 南京: 南京邮电大学自动化学院、人工智能学院, 2014: 37-45.
ZHANG Yipeng. Quadrotor unmanned aerial vehicle adaptive control and fault tolerance[D]. Nanjing: Nanjing University of Posts and Telecommunications. College of Automation and Artificial Intelligence, 2014: 37-45.
(编辑 刘锦伟)
收稿日期:2018-03-29;修回日期:2018-05-15
基金项目(Foundation item):国家自然科学基金资助项目(61603144);福建省高校产学合作科技重大项目(2013H6016);福建省自然科学基金资助项目(2018J01095) (Project(61603144) supported by the National Natural Science Foundation of China; Project(2013H6016) supported by the Major Project of Fujian Province for Industry-Study Cooperation; Project(2018J01095) supported by the Natural Science Foundation of Fujian Province)
通信作者:李平,博士研究生,副教授,从事非线性系统与先进控制、容错控制系统研究;E-mail: pingping_1213@126.com

