
DOI: 10.11817/j.issn.1672-7207.2019.03.010
һ�ֻ�������ṹ���������������ݴ����Ʒ���
֣�Ѿ�����ƽ
(���ȴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ���ţ�361021)
ժ Ҫ��
������ֱ����������ɻ���Ƿ���������ɣ�����ṹ��λ����ϵͳ��Ϊ�����̬��ϵͳ��Ϊ�ڻ������ȣ�ͨ�����������Ƶõ���ϵͳ�Ŀ������룬ͨ���ÿ������룬һ���棬���Ƶ����ڻ�������븩���ǵ�����ֵ����һ���棬�ɼ���ó�Ƿ���������ɡ����Ƶ����ĺ���Ǻ���������ֵ�Լ�������ƫ��������ֵ��Ϊ��̬��Ŀ��켣��ͨ����������һ����Ƶó���Ӧ����̬�����ɡ����ǵ�ִ�������ܻᷢ�����ϣ���������Ӧ�����ֱ���ڻ�����Ĺ��Ͻ��й��ƣ��Ӷ�ʵ�����������������ݴ�������ơ������ֱ����Ʒ��������ķ����õ���Ƿ���������ɽṹ������ʵ�ֶ�ִ�������ϵ��ݴ����о������������������������ִ��������������ʵ��λ�ú���̬���ȶ����٣���֤�����ÿ����ɵ���Ч�ԡ�
�ؼ��ʣ�
��������������ִ��������������ṹ������Ӧ�����������ݴ�������
��ͼ����ţ�V249.122+.3 ���ױ�־�룺A ���±�ţ�1672-7207(2019)03-0572-07
A fault tolerant control method for quadrotor based on inner and outer loops
ZHENG Jiajing, LI Ping
(College of Information Science and Engineering, Huaqiao University, Xiamen 361021, China)
Abstract: Inner and outer loops structure was adopted to avoid direct design of the under-actuated control laws of quadrotor, the position subsystem was the outer loop and attitude subsystem was the inner loop. First, the control inputs of position subsystem were recursively obtained by backstepping method, according to which the desired roll and pitch angles were derived and the under-actuated control law was calculated. The corresponding attitude control laws were further designed by backstepping using the target trajectory of attitude, which included the derived desired roll and pitch angles and the given desired yaw angle. Considering actuator faults, adaptive method was used to estimate faults of the inner and outer loops to realize the fault tolerant control for quadrotor. Compared with the direct design, the structure of under-actuated control law was simple and could achieve actuator fault tolerance. The results show that the quadrotor can still realize the steady tracking of position and attitude with actuator faults, which proves the effectiveness of obtained control laws.
Key words: quadrotor; actuator fault; inner and outer loop structure; adaptive; backstepping; fault tolerant control
�������������Ѿ���Ϊ����ϵͳ�о������������ˡ���ҵ�����������л����ȶ����俪չ�˴������о��������������������ܹ�ʵ�ִ�ֱ�����нṹ��������̬�����������͵��ص㣬�ھ����������������������Ҫ��ɫ���翹����֡�ũҵ��ֵ���ظ�ѹ��·Ѳ�ӡ��������ӡ��������Ƶȡ�����������������Ҫִ�е�������Ӷ����������л������Ӹ��ӻ�����������������������ڸ�����ת��״̬���������������Ƿ������ϵĿ����ԡ�Ϊ�˱�֤�������������ܹ���ȫ���У����ⷢ�����ϣ��ݴ����Ƽ������о��ܵ�Խ��Խ��Ĺ�ע�������ǵ�[1]���ǵ�����ֹ��ϵ�3�ֲ�ͬ�����£���ϻ��ַ��ݿ��Ƽ�����ʱ�ӿ���(TDC)��������һ��ϵͳ״̬���е����������ƽ��Ͳ������������˻�ִ�л����Ĺ�����Ϣ����ΰ��[2-5]�����������������̬ϵͳ������ִ��������ʧЧ���⣬���������Ӧ�ݴ����ƣ��������[6-7]���ڻ�ģ���Ƽ�����ͨ���������������ķ���ʵ��֤���������ݴ����Ƶ�³���Աȱ����ݴ����Ƶĺã���쿵�[8-11]ͨ�������������������������ֹ����µ�ģ���Լ���Ӧ�Ŀ����ɹ��ɵ�ģ�ͼ��Ͽ⣬����ϵͳģ��ʧ���ƥ�����ģ�ͣ�����ȡ��Ӧ�Ŀ����ɽ����ݴ����ơ����������о����ù۲���ʵ�ֶԹ��ϵ�������ع��������ѵ�[12]��ϵͳ�������Ա任��Ȼ�����û�ģ�۲����͵�Ч���ע��ĸ���Թ��Ͻ����ع�����ѫ��[13]�����һ�ֻ���״̬�۲��������Ĺ�����Ϸ�����������³����������Խ��������۷���������������������ϵͳ�Ŀ��ƽṹ�������ĵ�[14-17]����������Ϊ���ȫ������ϵͳ(z,��)��Ƶ�ȫ����������(u1, u4)�����Ƿ������ϵͳ(x-��, y-��)��Ƶ�Ƿ����������(u3, u2)�������ֿ��ƽṹ�£�������������������Ƿ�������Լ���λ��֮���ǿ��ϣ�Ƿ������������Ƹ��ӡ�Ϊ�˱���Ƿ���������ɵ�ֱ����ƣ���������ѡ������ṹ�����ݴ������о�����������ϵͳ��Ϊ���λ����ϵͳ���ڻ�����̬��ϵͳ����õ�Ƿ���������ɸ���࣬��ʵ�ʷ��п����и���ʵ�֡����ǵ�ִ�����������ϣ��������߲�������Ӧ�㷨�ع����ϣ�����ʵ�����������������ݴ�������ơ�
1 �������������Ķ�̬ģ��
1.1 ����ԭ��
�������������Ǿ���6���ɶȵĸ��塣��2����ֱ�ֲ��������Ϸֲ�4������������4����������ֱ�������4����������ת����4�����ϵ����������ǿ�ʹ���������������в�ͬģʽ�Ŀռ��˶����������������Ľṹ��ͼ1��ʾ��
ͼ1�У�Oi-xi-yi-zi��ʾ��������ϵ��Ob-xb-yb-zb��ʾ��������ϵ��4���������������ֱ�ΪF1��F2��F3��F4����1�ϵ�������1��������3Ϊ1�飬��ʱ����ת����2�ϵ�������2��������4Ϊ1�飬˳ʱ����ת����������2��������4֮������ٶȲ�ʱ����������x���������Ǧա�(-��/2, ��/2)����������1��������3ת�ٲ����ʱ����������y����������Ǧȡ�(-��/2, ��/2)������ʱ���˳ʱ����ת��2����ٶȲ���ʱ������ͻ�����z�������ٶȽ�С��������ת����ƫ��������ƫ���Ǧ���(-��, ��)�����ԣ��������ķ��п��Խ�������Ż������ƽ���˶������Ż��������ת�˶����ӻ�������ϵ����������ϵ����ת�任����R����ʽ��ʾ[18](����c(��)��s(��)�ֱ�Ϊcos(��)��sin(��)����д)��
 (1)
(1)
1.2 �˶�ѧ����
Ϊ��ʵ�����������������������п��ƣ�����Ҫ����䶯̬ģ�͡�[x,y,z]TΪ��������ϵ����������λ�ã�[��,��,��]TΪ��������ϵ�µ�ŷ���ǡ�����ţ�ٵڶ����ɣ���
 (2)
(2)
ʽ�У�aΪ���ٶȣ� Ϊ��������mΪ�������������������������������������Ľṹ�Գƣ���������ϵ������z�᷽�������֮�ͼ�λ��[x,y,z]T�Ŀ�������Ϊ
Ϊ��������mΪ�������������������������������������Ľṹ�Գƣ���������ϵ������z�᷽�������֮�ͼ�λ��[x,y,z]T�Ŀ�������Ϊ
 (3)
(3)
 (4)
(4)
ʽ�У�Fi(i=1,2,3,4)�ֱ�Ϊ4����������ֱ���ϵ������� bΪ����ϵ���� (i=1,2,3,4)Ϊ4����������ת�١���������ϵ����3��������ٶ�
(i=1,2,3,4)Ϊ4����������ת�١���������ϵ����3��������ٶ� ��
�� ��
�� Ϊ[19]
Ϊ[19]
 (5)
(5)
ʽ�У�gΪ�������ٶȣ�Ki(i=1,2,3)Ϊ����ϵ���������ظ�������ٶ�Ϊ ����ʽ(5)���Կ�������������������λ����ϵͳ����3�����ɶȣ�ȴֻ��1�������Ŀ��Ʊ���u1����Ȼ���������Ƿ�������ԡ���λ�ö�̬����̬��������ú�λ�ÿ�������u1�����3���������룺u1x=u1(cos��sin��cos��+sin��sin��)/m��u1y=u1(cos��sin��sin��-sin��cos��)/m��u1z=u1(cos��cos��)/m�����������������������ڻ����������·���ʱ��λ����ϵͳ����ִ�������ϡ����ڴ�ʱ4�������������������ı䣬ֱ��Ӱ���������������ķ��и߶ȣ��ٽ���任����������ϵ�£��ɵõ����˶����˶�ѧ����(λ�ù��϶���)��
����ʽ(5)���Կ�������������������λ����ϵͳ����3�����ɶȣ�ȴֻ��1�������Ŀ��Ʊ���u1����Ȼ���������Ƿ�������ԡ���λ�ö�̬����̬��������ú�λ�ÿ�������u1�����3���������룺u1x=u1(cos��sin��cos��+sin��sin��)/m��u1y=u1(cos��sin��sin��-sin��cos��)/m��u1z=u1(cos��cos��)/m�����������������������ڻ����������·���ʱ��λ����ϵͳ����ִ�������ϡ����ڴ�ʱ4�������������������ı䣬ֱ��Ӱ���������������ķ��и߶ȣ��ٽ���任����������ϵ�£��ɵõ����˶����˶�ѧ����(λ�ù��϶���)��
 (6)
(6)
ʽ�У�fa1��ʾִ�������ϱ�����֮���Խ����ϱ�ʾ��z�᷽������Ϊִ�����������ϻ�ֱ��Ӱ���������ĺ�������̬����z���ϵĸ߶ȱ仯����̬�ǵı仯���һ���ı��������x���y���ϵ�λ�ã��������ִ�����Ĺ���Ч���Ƕ�z���ϵĺ���������1��ƫ����fa1�������ϱ���fa1����z�᷽���ϡ������ɻ�������ϵ����������ϵ��ת������Ӧ��ţ�ٵڶ������к���������ٶ�֮��Ĺ�ϵ�����Խ������źű�ʾΪʽ(6)����ʽ��
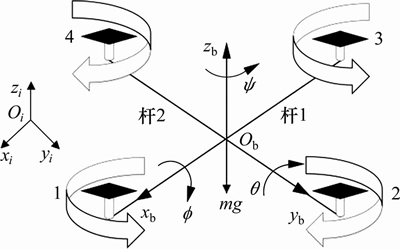
ͼ1 �������������Ľṹ
Fig. 1 Structure of quadrotor
���ݽǶ�������[20]������3������ת������Ϊ
 (7)
(7)
ʽ�У�Ix��Iy��Iz�ֱ�Ϊ������x��y��z���ת��������lΪÿ����������������ĵľ��룻cΪ���ı���ϵ����u2=F4-F2, u3=F3-F1, u4=d(-F1+F2-F3+F4)/b��Ϊ��̬��[��,��,��]T�Ŀ������ã�dΪ��-���ر������ӣ�JrΪ��������ת����������r=��1-��2+��3-��4Ϊ�����ת�ӽ��ٶȣ�Kj(j=4,5,6)Ϊ����ϵ���������Ƹ���Ľ��ٶ�Ϊ �����ϵ�ʽ���ұߴ����ҷֱ��ʾ���������ЧӦ���������ء�ת�ӵ�����ЧӦ(z��Ϊ��)���������ء���Ȼ���������ڻ��������£���̬��ϵͳ����ִ�������ϣ�����������������С���ɺ���ת�ӵ�����ЧӦ����ˣ���ʽ(7)�ɵý��˶����˶�ѧ����(��̬���϶���)Ϊ
�����ϵ�ʽ���ұߴ����ҷֱ��ʾ���������ЧӦ���������ء�ת�ӵ�����ЧӦ(z��Ϊ��)���������ء���Ȼ���������ڻ��������£���̬��ϵͳ����ִ�������ϣ�����������������С���ɺ���ת�ӵ�����ЧӦ����ˣ���ʽ(7)�ɵý��˶����˶�ѧ����(��̬���϶���)Ϊ
 (8)
(8)
ʽ�У�fa2��fa3��fa4Ϊ��ִ̬�������ϱ�����
2 ������ݴ��������
������ƽṹ��ͼ2,���У�xd��yd��zd�ֱ�Ϊ����x��y��z��������������������������ִ��������ʱ���������λ����ϵͳ��Ƿ�����ݴ�������u1����ֱ����Ƶģ�����ͨ��3���ֱ��ɷ�������ƵĿ�������u1x��u1y��u1z����õ����Ϊ�ڻ��ṩ�����ĸ����Ǧ�d�ͺ���Ǧ�d�������ڻ�����̬��ϵͳ����̬�ݴ�������u2��u3��u4Ҳ�ɷ�������Ƶõ�������н��������Ӧ�����Թ�����Ϣ���й��ƣ��Ա���й��ϵ��ڡ�
���Ƚ���λ����ϵͳ���ݴ�������ơ���u1zΪ�����ܷ������ݴ�������Ƶľ��岽�衣
����1������z1Ϊz�ĸ�����������z2Ϊ������������
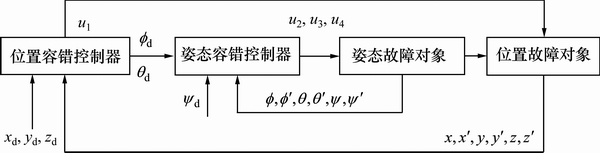
ͼ2 ��������Ŀ��ƽṹ
Fig. 2 Control structure based on inner and outer loops
 (9)
(9)
 (10)
(10)
ʽ�У�zdΪ����z�������� Ϊz��һ��������ʾ��z�᷽������ٶȣ�
Ϊz��һ��������ʾ��z�᷽������ٶȣ� Ϊ������Ʊ�����
Ϊ������Ʊ�����
��ʽ(10)����ʽ(9)����
 (11)
(11)
ѡ��������ŵ���ѡ����V1����

 (12)
(12)
��V1��������
 (13)
(13)
Ϊ��ȷ�� ��0ʼ�ճ�������
��0ʼ�ճ�������
 (14)
(14)
ʽ�У�c1Ϊ����������ˣ�ʽ(13)����д��
 (15)
(15)
ʽ(15)�еķ��Ų�ȷ����z1z2������һ�����д�����
����2������ Ϊʵ�ʹ���fa1�Ĺ���������
Ϊʵ�ʹ���fa1�Ĺ��������� ��ʾ���ϵĹ���ֵ�����ļ������fa1Ϊһ����������
��ʾ���ϵĹ���ֵ�����ļ������fa1Ϊһ���������� ��
��
ѡ��������ŵ���ѡ����V2Ϊ
 (16)
(16)
ʽ�У���1Ϊ����������V2��������
 (17)
(17)
��ʽ(6)��ʽ(10)��֪z2�ĵ��� Ϊ
Ϊ
 (18)
(18)
���У���ʽ(14)��֪��1�ĵ��� Ϊ
Ϊ
 (19)
(19)
��ʽ(18)��ʽ(19)����ʽ(17)����

 (20)
(20)
Ϊ��ȷ�� ��0ʼ�ճ���������z�Ŀ�������u1z�����Ϊ
��0ʼ�ճ���������z�Ŀ�������u1z�����Ϊ
 (21)
(21)
ʽ�У�c2Ϊ������������Ӧ��������£�
 (22)
(22)
�ο����϶�u1z�ķ�������Ʋ��裬����x��y�Ŀ�������u1x��u1y�ֱ����Ϊ��
 (23)
(23)
 (24)
(24)
ʽ�У�c3��c4��c5��c6��Ϊ��������
����Ƶõ���3����������ɵ������ĸ����� �ͺ����
�ͺ���� �����ҿɼ���õ�Ƿ����������(λ���ݴ�������)u1����
�����ҿɼ���õ�Ƿ����������(λ���ݴ�������)u1����
 (25)
(25)
 (26)
(26)
 (27)
(27)
��ʽ(27)���Կ�����Ƿ����������(λ���ݴ�������)u1�ɼ���õ����ṹ������ʵ�֡�
������̬������ϵͳ�Ŀ�����ƣ�����zi(i=7,9,11)�ֱ�Ϊ��̬ ��
�� ��
�� �ĸ�����������zj(j=8,10,12)Ϊ����������������
�ĸ�����������zj(j=8,10,12)Ϊ���������������� �ֱ�Ϊ��3����̬�ǵ�����������ʽ(8)����̬���϶����������Ӧ����̬�����ݴ������������岽����λ�û����ݴ����Ʋ�����ͬ����Ƶ�3����̬�ݴ�������Ϊ��
�ֱ�Ϊ��3����̬�ǵ�����������ʽ(8)����̬���϶����������Ӧ����̬�����ݴ������������岽����λ�û����ݴ����Ʋ�����ͬ����Ƶ�3����̬�ݴ�������Ϊ��
 (28)
(28)
 (29)
(29)
 (30)
(30)
ʽ�У�c7��c8��c9��c10��c11��c12��Ϊ����������Ӧ������Ӧ�����Ϊ��
 (31)
(31)
 (32)
(32)
 (33)
(33)
ʽ�У���i(i=2,3,4)��Ϊ��������
���Ͽ�֪�����Ǵ���ִ�������ϵ�������������ϵͳ����λ�ú���̬��ϵͳ�Ķ�̬���Էֱ���ʽ(6)��ʽ(7)��������������ṹ�Ը�ϵͳ�����ݴ�������ƣ��ֱ�ó���ʽ(27)��ʾ��λ����ϵͳ�ݴ�����������ʽ(28)~(30)��ʾ����̬��ϵͳ�ݴ������������ʽ(22)��ʽ(31)~(33)����������Ӧ�ɣ������ݴ��������ܹ�ʹ������������ϵͳ��ִ������������±��ֱջ��ȶ��ԣ���ʹ��Ӧ��λ�ú���̬�������ܸ��ٸ��Ե��趨ֵ��
3 ������
�����������������λ�ù���ģ�ͺ���̬����ģ���Լ�λ���ݴ�����������̬�ݴ�����������Matlab/Simulinkƽ̨�ϴ����ṹ����������������ص�ģ�Ͳ�������1��
��1 ������������ģ�Ͳ���
Table 1 Model parameters for quadrotor
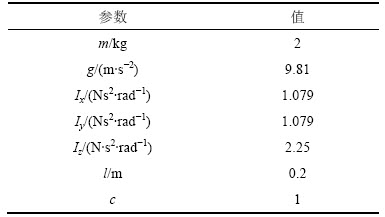
������������������ʼλ��Ϊ[0,0,0,]T m����0 sʱ������λ��Ϊ[0.6,0.6,0.6]T m����t=10 sʱ����z=0.6 m�ĸ߶���1���߳�Ϊ0.3 m���������˶���������50 s��ʼ���䵽����λ��[0.6,0.6,0]T m����ʼ����̬������Ϊ[0,0,0]T rad�������ڷ��й����У�ƫ����ʼ�ձ��֦�d=0.5 rad������t=60 s�ָ���0 rad��
������t=10 sʱ����������������ִ�������ϣ�ȡfai(i=1,2,3,4)=10���ݴ�����������c1=c2=c3=c4=2��c5=c6=c11=c12=10��c7=c8=c9=c10=3������Ӧ�ɲ�����1=��4=20����2=��3=100������ʱ��Ϊ80 s����������ͼ3~8��ʾ��
��ͼ3�ɼ���ʵ��ִ�������Ϻ���fa1~fa4���Ա���ȷ���ع��� ��˵�����������Ӧ�㷨����Ч�ԡ�����
��˵�����������Ӧ�㷨����Ч�ԡ����� ��
�� ���߷ֱ���50 s��60 sʱ����С���ȵij�����ԭ�������������������ֱ���t=50 s��t=60 sʱ���߶Ⱥ�ƫ���ǵ����������˱仯��ͼ4��ʾΪ������������3������[x,y,z]T��λ�ø������ߣ�ͼ5��ʾΪ��̬
���߷ֱ���50 s��60 sʱ����С���ȵij�����ԭ�������������������ֱ���t=50 s��t=60 sʱ���߶Ⱥ�ƫ���ǵ����������˱仯��ͼ4��ʾΪ������������3������[x,y,z]T��λ�ø������ߣ�ͼ5��ʾΪ��̬ �������ߣ��������й������ȶ�����������λ��
�������ߣ��������й������ȶ�����������λ�� ����̬
����̬ �źš����⣬λ��������10 sʱ������ִ�������ϵ�Ӱ�죬�����ն��ܽϿ�ػָ��ȶ����٣�����������Ƶ��ݴ��������ܶ�ִ�������Ͻ�����Ч�Ҽ�ʱ���ݴ���ͼ6��ͼ7��ʾ�ֱ�Ϊʵʱ�����ٶ�[u,v,w]T����ٶ�[p,q,r]T���ߡ������������������Ŀռ��˶��켣��ͼ8��ʾ��
�źš����⣬λ��������10 sʱ������ִ�������ϵ�Ӱ�죬�����ն��ܽϿ�ػָ��ȶ����٣�����������Ƶ��ݴ��������ܶ�ִ�������Ͻ�����Ч�Ҽ�ʱ���ݴ���ͼ6��ͼ7��ʾ�ֱ�Ϊʵʱ�����ٶ�[u,v,w]T����ٶ�[p,q,r]T���ߡ������������������Ŀռ��˶��켣��ͼ8��ʾ��
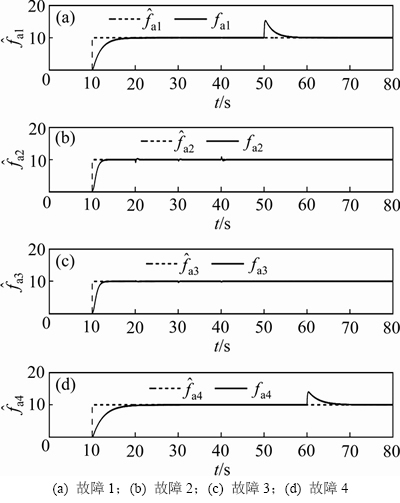
ͼ3 ����Ӧ���Ϲ���
Fig. 3 Adaptive fault estimation
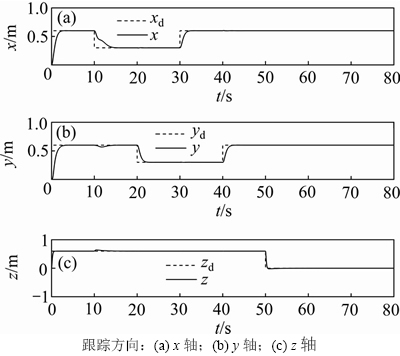
ͼ4 λ�ø���
Fig. 4 Position tracking
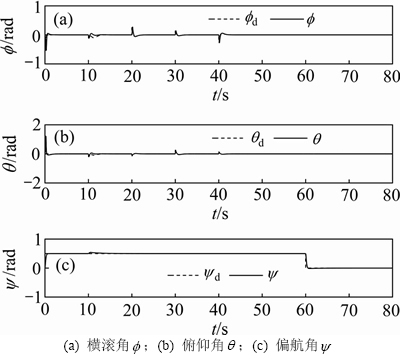
ͼ5 ��̬����
Fig. 5 Attitude tracking
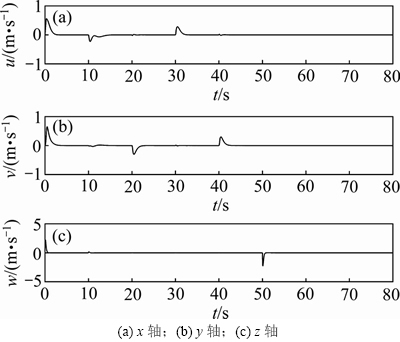
ͼ6 ���ٶ�����
Fig. 6 Linear velocity curves
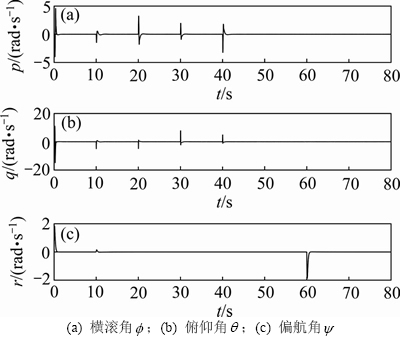
ͼ7 ���ٶ�����
Fig. 7 Angular velocity curves
�����������������Ŀռ��˶��켣��ͼ8��ʾ�����ڿ�ʼ����10 s֮���ܵ�ִ�������ϵ�Ӱ�죬�������������ĸ���ƫ�������켣�������ݴ����������������������������ָֻ��ȶ����٣��������Ԥ������
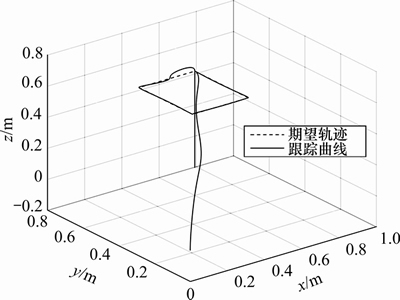
ͼ8 �ռ��˶��켣
Fig. 8 Space movement trajectory
4 ����
1) �������Ӧ�㷨�ܹ���ִ����������Ϣ���н�ȷ�ع���
2) �ɷ��������õ���λ�û�����̬�����ݴ��������ܹ�����ִ�������ϣ��Ӷ�ʵ�ֹ�����������������λ�ú���̬���ȶ����١�
3) ����ṹ�£�����Ƿ�����ɵĿ����������ã��ṹ��������ʵ�֡�
�ο����ף�
[1] ������, ��ͬ��. ������������ʱ�ӻ��ַ����ݴ�����[J]. ϵͳ��������Ӽ���, 2015, 37(10): 2341-2346.
HE Youzhi, LIU Tongqi. Time delay integral inversion fault- tolerant control of quadrotor aircraft[J]. System Engineering and Electronic Technology, 2015, 37(10): 2341-2346.
[2] ��ΰ, �ʱ�. ���������˻���̬ϵͳ�ķ������ݴ��������[J]. ����������Ӧ��, 2015, 32(11): 1457-1463.
HAO Wei, XIAN bin. Nonlinear fault-tolerant control design of four rotor UAV attitude system[J]. Control Theory and Application, 2015, 32(11): 1457-1463.
[3] ������. �������������ݴ������о�[D]. ���: ���ҵ��ѧ�����������Զ���ѧԺ, 2017: 19-32.
FAN Jiaming. Fault tolerant control study of quadrotor[D]. Tianjin: Tianjin Polytechnic University. College of Electrical Engineering and Automation, 2017: 19-32.
[4] NGUYEN D T, SAUSSI D, SAYDY L. Robust self-scheduled fault-tolerant control of a quadrotor UAV[J]. IFAC-Papers OnLine,2017, 50(1): 5761-5767.
D, SAYDY L. Robust self-scheduled fault-tolerant control of a quadrotor UAV[J]. IFAC-Papers OnLine,2017, 50(1): 5761-5767.
[5] �ʱ�, ��ΰ. ������������˻�ִ��������ʧЧ���ݴ����Ʒ���: �й�, CN10374421.5[P]. 2015-10-07.
XIAN Bin, HAO Wei. Fault tolerant control method for actuator partial failure of quadrotor UAV: China, CN10374421.5[P]. 2015-10-07.
[6] ������, ����, ����, ��. ����������ϵͳ���ݴ������㷨�����ʵ��[J]. ���ƹ���, 2016, 23(12): 1874-1882.
ZHANG Youmin, YU Xiang, WANG Ban, et al. Design and implementation of fault-tolerant control algorithms for an unmanned quadrotor system[J]. Control Engineering, 2016, 23(12): 1874-1882.
[7] LI Tong, ZHANG Youmin, GORDON B W. Nonlinear fault-tolerant control of a quadrotor UAV based on sliding mode control technique[J]. IFAC Proceedings Volumes, 2012, 45(20): 1317-1322.
[8] ���, �Ѽ�. ���ڶ�ģ�͵����˻�����������ݴ����Ʒ���[J]. ɽ���Ƽ���ѧѧ��(��Ȼ��ѧ��), 2017, 36(4): 9-15.
LI Wei, CUI Jiajia. Fault diagnosis and fault tolerant control method of UAV based on multi model[J]. Journal of Shandong University of Science and Technology(Natural Science), 2017, 36(4): 9-15.
[9] ��ѩ��. ���������˻��Ķ�ģ�������[J]. �����������Ӧ��, 2016, 52(21): 252-257.
XU Xuesong. Multi model fault diagnosis of quadrotor[J]. Computer Engineering and Application, 2016, 52(21): 252-257.
[10] BOSKOVIC J, LI S M, MEHRA R. Evaluation of the properties of a multiple-model reconfigurable flight controller on a 6 DOF simulation[C]// AIAA Guidance, Navigation, and Control Conference and Exhibit. Denver, America: American Institute of Aeronautics and Astronautics, 2013: 2514-2525.
[11] ��֥ϼ. ������ֱ���������ϵͳ����������ݴ������о�[D]. �Ͼ�: �Ͼ����պ����ѧ�Զ���ѧԺ, 2013: 12-31.
YIN Zhixia. Fault diagnosis and fault tolerance research on quadrotor helicopter multi fault system[D]. Nanjing: Nanjing University of Aeronautics & Astronautics. College of Automation, 2013: 12-31.
[12] ����, ����, ����ο, ��. һ�ֻ��ڻ�ģ�۲������������������������ݴ����Ʒ���: �й�, CN10776314.5[P]. 2016-02-24.
YANG Pu, PAN Xu, LIU Jianwei, et al. An active fault tolerant control method for quadrotor aircraft based on sliding mode observer: China, CN10776314.5[P]. 2016-02-24.
[13] ��ѫ, ����. ���������������ݴ���̬�ȶ�����[J]. ��������, 2014, 21(7): 14-18.
GONG Xun, WANG Li. Fault-tolerant attitude stabilization control of four rotor aircraft[J]. Electro-Optic and Control, 2014, 21(7): 14-18.
[14] ������. С������������ֱ������ģ�����Ʒ����о�[D]. ��ɳ: ������ѧ������ѧ��Ϣϵͳ�����ѧԺ, 2006: 17-32.
NIE Bowen. Research on modeling and control method of micro quadrotor unmanned helicopter[D]. Changsha: National Defense University of Science and Technology. College of Information Systems and Management, 2006: 17-32.
[15] ����ΰ, ��ϯ��. ���������˻���ģ�켣���ٿ��������[J]. ��������, 2016, 23(7): 55-58.
WANG Dawei, GAO Xifeng. Sliding mode trajectory tracking controller design for quadrotor[J]. Electro-Optic and Control, 2016, 23(7): 55-58.
[16] XIONG Jingjing, ZHANG Guobao. Global fast dynamic terminal sliding mode control for a quadrotor UAV[J]. ISA Transactions, 2017, 66: 233-240.
[17] ����, �⻳��, ����, ��. ���ڷ��������������������켣�����о�[J]. ���������, 2016, 33(5): 78-83.
TENG Xiong, WU Huaiyu, CHEN Yang, et al. Research on trajectory tacking of quadrotor based on backstepping[J]. Computer Simulation, 2016, 33(5): 78-83.
[18] ������, ������, �Ƶø�. ����ESO��Ƿ�����������������켣³������[J]. ϵͳ��������Ӽ���, 2015, 37(9): 2102-2108.
YANG Liben, ZHANG Weiguo, HUANG Degang. Trajectory robust control of underactuated quadrotor aircraft based on ESO[J]. System Engineering and Electronic Technology, 2015, 37(9): 2102-2108.
[19] ZHENG Enhui, XIONG Jingjing, LUO Jiliang. Second order sliding mode control for a quadrotor UAV[J]. ISA Transactions, 2014, 53(4): 1350-1356.
[20] ������. ���������˻�����Ӧ����������ݴ�[D]. �Ͼ�: �Ͼ��ʵ��ѧ�Զ���ѧԺ���˹�����ѧԺ, 2014: 37-45.
ZHANG Yipeng. Quadrotor unmanned aerial vehicle adaptive control and fault tolerance[D]. Nanjing: Nanjing University of Posts and Telecommunications. College of Automation and Artificial Intelligence, 2014: 37-45.
(�༭ ����ΰ)
�ո����ڣ�2018-03-29�������ڣ�2018-05-15
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61603144)������ʡ��У��ѧ�����Ƽ��ش���Ŀ(2013H6016)������ʡ��Ȼ��ѧ����������Ŀ(2018J01095) (Project(61603144) supported by the National Natural Science Foundation of China; Project(2013H6016) supported by the Major Project of Fujian Province for Industry-Study Cooperation; Project(2018J01095) supported by the Natural Science Foundation of Fujian Province)
ͨ�����ߣ���ƽ����ʿ�о����������ڣ����·�����ϵͳ���Ƚ����ơ��ݴ�����ϵͳ�о���E-mail: pingping_1213@126.com
ժҪ����������ṹ������ֱ����������ɻ���Ƿ���������ɣ�����ṹ��λ����ϵͳ��Ϊ�����̬��ϵͳ��Ϊ�ڻ������ȣ�ͨ�����������Ƶõ���ϵͳ�Ŀ������룬ͨ���ÿ������룬һ���棬���Ƶ����ڻ�������븩���ǵ�����ֵ����һ���棬�ɼ���ó�Ƿ���������ɡ����Ƶ����ĺ���Ǻ���������ֵ�Լ�������ƫ��������ֵ��Ϊ��̬��Ŀ��켣��ͨ����������һ����Ƶó���Ӧ����̬�����ɡ����ǵ�ִ�������ܻᷢ�����ϣ���������Ӧ�����ֱ���ڻ�����Ĺ��Ͻ��й��ƣ��Ӷ�ʵ�����������������ݴ�������ơ������ֱ����Ʒ��������ķ����õ���Ƿ���������ɽṹ������ʵ�ֶ�ִ�������ϵ��ݴ����о������������������������ִ��������������ʵ��λ�ú���̬���ȶ����٣���֤�����ÿ����ɵ���Ч�ԡ�
[1] ������, ��ͬ��. ������������ʱ�ӻ��ַ����ݴ�����[J]. ϵͳ��������Ӽ���, 2015, 37(10): 2341-2346.
[2] ��ΰ, �ʱ�. ���������˻���̬ϵͳ�ķ������ݴ��������[J]. ����������Ӧ��, 2015, 32(11): 1457-1463.
[3] ������. �������������ݴ������о�[D]. ���: ���ҵ��ѧ�����������Զ���ѧԺ, 2017: 19-32.
[5] �ʱ�, ��ΰ. ������������˻�ִ��������ʧЧ���ݴ����Ʒ���: �й�, CN10374421.5[P]. 2015-10-07.
[6] ������, ����, ����, ��. ����������ϵͳ���ݴ������㷨�����ʵ��[J]. ���ƹ���, 2016, 23(12): 1874-1882.
[8] ���, �Ѽ�. ���ڶ�ģ�͵����˻�����������ݴ����Ʒ���[J]. ɽ���Ƽ���ѧѧ��(��Ȼ��ѧ��), 2017, 36(4): 9-15.
[9] ��ѩ��. ���������˻��Ķ�ģ�������[J]. �����������Ӧ��, 2016, 52(21): 252-257.
[11] ��֥ϼ. ������ֱ���������ϵͳ����������ݴ������о�[D]. �Ͼ�: �Ͼ����պ����ѧ�Զ���ѧԺ, 2013: 12-31.
[13] ��ѫ, ����. ���������������ݴ���̬�ȶ�����[J]. ��������, 2014, 21(7): 14-18.
[14] ������. С������������ֱ������ģ�����Ʒ����о�[D]. ��ɳ: ������ѧ������ѧ��Ϣϵͳ�����ѧԺ, 2006: 17-32.
[15] ����ΰ, ��ϯ��. ���������˻���ģ�켣���ٿ��������[J]. ��������, 2016, 23(7): 55-58.
[17] ����, �⻳��, ����, ��. ���ڷ��������������������켣�����о�[J]. ���������, 2016, 33(5): 78-83.
[20] ������. ���������˻�����Ӧ����������ݴ�[D]. �Ͼ�: �Ͼ��ʵ��ѧ�Զ���ѧԺ���˹�����ѧԺ, 2014: 37-45.
