
DOI: 10.11817/j.issn.1672-7207.2017.04.021
С���������������Ļ�ģ����
�����1, 2������ǿ1, 2��������1, 2
(1. �Ͽ���ѧ ���������ƹ���ѧԺ�����300350��
2. ��������ܻ����˼����ص�ʵ���ң����300350)
ժ Ҫ��
��������ģ�ͣ���ƻ�ģ����������߿���ϵͳ��³���ԡ����Ƚ�������ģ�ͻ���Ϊȫ������Ƿ����2���֣�ȫ������ϵͳ�ɸ߶Ⱥ�ƫ����2��������·��ɣ���Ƿ������ϵͳ�����4����������2����������Ȼ�����ȫ����ϵͳ��2����·����˻��ڷ�����(Backstepping)�Ļ�ģ���ƣ�����һ���Ƶ�������ʱ���ն˻�ģ����������Ƿ������ϵͳд��һ�ּ������ͣ�������һ��Ƿ����������ʽ�Ļ�ģ������������Lyapunov�ȶ�������֤������ƵĻ�ģ����ϵͳ���ȶ��ԡ��о���������������������������������Ч�ģ��������������õ�³���ԺͿ��ٸ��ٶ�̬���ܣ������ܹ���Ч�����ƶ�������
�ؼ��ʣ�
��������������Ƿ����ϵͳ����ģ�������ն˻�ģ��������������
��ͼ����ţ�TP272 ���ױ�־�룺A ���±�ţ�1672-7207(2017)04-1006-06
Sliding mode control of a quadrotor helicopter
WANG Chenlu1, 2, CHEN Zengqiang1, 2, SUN Mingwei1, 2
(1. College of Computer and Control Engineering, Nankai University, Tianjin 300350, China;
2. Tianjin Key Laboratory of Intelligent Robotics, Tianjin 300350, China)
Abstract: A sliding mode control scheme was proposed for a 6 degree of free quadrotor model to improve the robustness of the quadrotor control system. Firstly, the quadrotor model was divided into two parts which included a fully-actuated subsystem and an under-actuated subsystem. The fully-actuated subsystem was composed of two independent loops with altitude and yaw angle, while the under-actuated subsystem had four state variables and two control variables. Secondly, a backstepping based on sliding mode controller and furthermore a finite time terminal sliding mode controller were proposed to the fully-actuated subsystem, and then a cascade sliding mode controller was designed to control the under-actuated subsystem which was transformed into a cascade standard form. Thirdly, the stability of the designed control system was proved by using Lyapunov stability theorem. The results show that the proposed quadrotor control scheme is effective, it not only has good robustness and fast tracking dynamic performance, but also has the ability to restrain buffeting.
Key words: quadrotor; under-actuated system; sliding mode control; terminal sliding mode control; back stepping
���������������л�����ǿ�����������ص㣬����ʵ�ִ�ֱ��������ͣ�ȷ�����̬��������㷺Ӧ���ڿ��⡢���ġ���ء����Ȼ�У��������Ѿ���Ϊ���¡�����������о��ȵ㡣�����ɶȵ�С��������������ģ�;��е��͵ķ����ԡ�ǿ����Ժ�Ƿ�������ԣ��ּ����ܵ�ģ�ͱ�����ȷ���Ժ������������ĸ��ţ�����ڿ����ϴ���һ���Ѷ�[1]�������������������Ŀ��Ʒ�����Backstepping������[2]������Ӧ����[3]����ģ����[4]�ȣ������꣬һЩ��ӱ�Ŀ��Ʒ������Կ��ſ���[5]��ģ������[6]��³��Ԥ�����[7]��Ҳ�ɹ�Ӧ�õ��������Ŀ����С����л�ģ�����������³����ǿ���ص㣬��Ϊ���������Ƶ��о��ȵ�֮һ��DIKMEN��[8]�����Ӧ������̬���ƵĻ�ģ��������XU��[9]����ƵĻ�ģ������ͬʱ�������̬���ƺ�λ�ÿ��ƣ�LEE��[10]�����һ������Ӧ�����뻬ģ�������ϵĿ��Ʒ�����ͨ������Ӧ������ȷ���ԵĹ���ֵ����С�˻�ģ�����������棬ʹ��ģ���Ƹ������ڵ�������С����������������[11]����ģ����ʵ��Ӧ���ڻ���OS4������ƽ̨�ķ���ʵ���У���ȡ���˽ϺõĿ���Ч�����ڴˣ��������߲��û�ģ������Backstepping���ϵķ������õ��Ŀ������ṹ��³����ǿ�����ھ���ǿ�Ŷ��Ͳ�ȷ���Ե�����������ϵͳ���кܺõĿ���Ч�����ڻ�ģ���ƵĻ����ϣ������������ʱ���ն˻�ģ���������������ߵĿ���Ч�����бȽϡ�
1 ������������������ģ��
��������ԭʼ����ѧģ�ͷdz�����[12]���ں�������Ħ������������ЧӦ������£��õ��������������ļ�ģ��[9]��
 (1)
(1)
���У�(x��y��z)��ʾ��������λ�ã�f���Ⱥͦ�Ϊ����������̬�������ֱ�Ϊ��ת�ǡ������Ǻ�ƫ���ǣ�KiΪ����ϵ����IiΪÿ�����ת��������UiΪ4����������mΪ��������������gΪ�������ٶȣ�lΪ�������İ뾶����
������������ϵͳ��6�����ɶ�(x��y��z��f���ȣ���)��4��������(U1��U2��U3��U4)���������Ʊ����ĸ���С�����ɶȵĸ�������ˣ���������������һ�����͵�Ƿ����ϵͳ��
2 �����������
2.1 ��������������ģ��
����ƿ�����ǰ���ȶ���������������ģ�ͽ��з����ʹ�������ģ��(1)����Ϊ2���֣���ϵͳ(2)��2��������(U1��U4)��2��������(z����)����ˣ���ȫ����ϵͳ����ϵͳ(3)��2��������(U2��U3)��4��������(x��y��f����)����ˣ���Ƿ����ϵͳ��
 (2)
(2)
 (3)
(3)
2.2 ȫ������ϵͳ�Ļ�ģ���������
ȫ������ϵͳ�ɸ߶Ⱥ�ƫ����2������ͨ����ɣ���˿��Էֱ���ƿ��������Ը߶�ͨ��Ϊ������ƻ���Backstepping�Ļ�ģ��������
Backstepping�ĺ���˼�������1��������������Դ�Ϊ�м���������Lyapunov�ȶ����۷��������Ŀ����������ڶ���ϵͳ����Backstepping����ƻ�ģ��������Ϊ2����
��1����������������
 (4)
(4)
��
 (5)
(5)
���������������Ϊ
 (6)
(6)
���У���1Ϊ��������
��ʽ(6)���� �У���
����
 (7)
(7)
���� ����
����
 (8)
(8)
����Lyapunov�ȶ����ۣ�ѡ��Lyapunov���� ����
����
 (9)
(9)
������e1e2ʹ��ϵͳ������Lyapunov�ȶ����������ڵ�2������У���Ҫ�������Ŀ�����U1�м���1�������e1e2��
��2����ѡ��ƽ�棺
 (10)
(10)
 (11)
(11)
������������ϵͳ��Lyapunov����:
 (12)
(12)
 (13)
(13)
����ָ���ͻ�ģ������[13]��
 (14)
(14)
���� ��
�� ��
��
��ʽ(11)��(14)�����������

 (15)
(15)
Ϊ��������1���������e1e2��� �м���e1���
���e1���

 (16)
(16)
��֤Lyapunov�ȶ���:
 (17)
(17)
��ϵͳ����Lyapunov�ȶ��Զ����������������ɡ�ͬ�����Եõ�ƫ����ͨ���Ŀ�������

 (18)
(18)
2.3 ȫ������ϵͳ���ն˻�ģ���������
2.2������ƵĻ�ģ�������������Ի�ģ�棬ϵͳΪָ������������ʱ�������������������������ڻ�ģ�档�ն˻�ģ������һ������ʱ����ƣ���ϵͳ��������ʱ������������ģ�棬���и��õ��������ܺ�³����[11]��
������������ʱ��Lyapunov�ȶ��о�[14]��
�����������������V�������� ��ʹ����������������
��ʹ����������������
1) V����������
2) ������ʵ��c��0�ͦ���(0��1)���Լ�1������ԭ��Ŀ����� ��ʹ����������������
��ʹ����������������
 ��
��
��ϵͳΪ����ʱ���ȶ��ġ�
������������ʱ��Lyapunov�ȶ��оݣ��ڻ�ģ�������Ļ����ϣ����������ȫ������ϵͳ���ն˻�ģ��������
��Ȼ�Ը߶ȿ���Ϊ����ѡ������Ի�ģ��[14]��
 (19)
(19)
���У���Ϊ��������p��qΪ����������2q��p��q��
 (20)
(20)
���ݻ�ģ����ԭ����

 (21)
(21)
���У��ţ�M��k��Ϊ��ʵ����
ѡȡLyapunov���� ��
��

 (22)
(22)
��������ʱ��ϵͳ��Lyapunov�ȶ��оݣ�ϵͳ����ʱ���ȶ���
2.4 Ƿ������ϵͳ�Ļ�ģ���������
Ƿ����ϵͳ��ʽ���ֶ���������������Ʒ���Ҳ������ͬ�����ȸ���Ƿ����ģ�͵�һ�����ʽ����Ƿ��������ϵͳ[15]��
 (23)
(23)
���У�d1��d2Ϊ�Ŷ��uΪ��������f1�ǹ���x1��x2��x3�ĺ����������� ��
�� �������н硣
�������н硣
��ʽ(3)��ʾ��������������Ƿ������ϵͳ��дǷ����������ʽ��
 (24)
(24)
���� ��
�� ��
�� ��
�� ��
�� ��
�� ������ȫ������ϵͳ����Ӧ�ٶȺܿ죬ƫ���Ǧ����ں̵ܶ�ʱ���ڵ������ֵ��d����ˣ�ȡ���Ʀס֦�d�Լ���ơ���
������ȫ������ϵͳ����Ӧ�ٶȺܿ죬ƫ���Ǧ����ں̵ܶ�ʱ���ڵ������ֵ��d����ˣ�ȡ���Ʀס֦�d�Լ���ơ���
 ��
��
 ��
��
���ݻ�ģ��ṹ���Ƶ�ԭ�������廬��ƽ�棺 ������c1��c2��c3Ϊ������������Ϊ��ʹ��ģ����ϵͳ�ȶ���Ҫ��ϵͳ��Ѹ������������ƽ�棬���ػ���ƽ���˶������뿪����ƽ�档
������c1��c2��c3Ϊ������������Ϊ��ʹ��ģ����ϵͳ�ȶ���Ҫ��ϵͳ��Ѹ������������ƽ�棬���ػ���ƽ���˶������뿪����ƽ�档
����ϵͳ����Ӹ��ŵ������(��)��ͨ���ⷽ�� ���õ��ڻ���ģ̬�����ڵĵ�Ч����
���õ��ڻ���ģ̬�����ڵĵ�Ч���� ��
��

 (25)
(25)
�ڿ��Dz�ȷ���Ժ���Ӹ��ŵ�����£���d1��d2��ʾģ�ͱ�����ȷ���Ժ��ⲿ�Ŷ����ܺͣ�d1��d2Ϊ�н��Ŷ��������� ����ʱ������Ϊ��Ч���ƺ��л�����֮�ͣ�
����ʱ������Ϊ��Ч���ƺ��л�����֮�ͣ� ������Lyapunov�ȶ�����������л�����
������Lyapunov�ȶ�����������л����� ��
��
ȡLyapunov���� ��������������õ���
��������������õ���
 (26)
(26)
�� (27)
(27)
���У� ����Ϊ��������
������������
��ʽ(26)����ʽ(27)��
 (28)
(28)
����Lyapunov�ȶ�������ϵͳ�ȶ���
 (29)
(29)
����


2.5 ���������
��ģ������һ����ҪƵ���л�����״̬�Ŀ��Ʒ�����ϵͳ�ڵ��ﻬģ����ػ�ģ���˶����������л�������ʵ�ʿ����е��ͺ��ԣ�ϵͳ���ڻ�ģ�渽����С�ķ�Χ������Ƶ������[13]����������������ϵͳ�������ȶ����ƻ�ϵͳ���ܣ�������������ȫ�����������Բ�ȡһ���Ĵ�ʩ�����ơ�
���IJ���һ�ָ�������������R(S)��������������еķ��ź���sgn(S)��������һ���̶������ƶ���
 (30)
(30)
���У���Ϊ��С����������
3 �����о�
����ͨ��Matlab��������֤����ƿ�������ʵЧ�ԡ�
�������������IJ���������K1=K2=K3=0.010��K4=K5=K6=0.012��I1=I2=1.25��I3=2.5��m=2 kg��l=0.2 m��g=9.8 m/s2��
���ȶ�ȫ������ϵͳ������ͨ��ģ���ƺ��ն˻�ģ���ƵĶԱȷ����о����������ԣ���ͨ��ģ����������ѡ��Ϊ����1=1����1=0.5��k1=2����4=1.5����4=0.7��k4=2���ն˻�ģ����������ѡ��Ϊ����1=7��q1=3��p1=5����1=0.5����4=7��q4=3��p4=5����4=0.4��M=1��
������ͨ��ģ���������ն˻�ģ������ʱ���������߶Ⱥ�ƫ���ǵı仯����ͼ1����ͼ1��֪�������������������Ŀ������⣬��ͨ��ģ�����������ڽ϶̵�ʱ����ʹ�������ȶ�������λ�ú���̬���������������������Ҫ���ն˻�ģ�����ڿ�������ƺͲ��������ϸ����ӣ��������ٶȸ��죬����ͨ��ģ�������Ŀ���Ч�����á�
Ȼ��Է�����ϵͳ���з��з��档ȫ������ϵͳ������ͨ��ģ���ƣ�Ƿ������ϵͳ���ü�����ʽ�Ļ�ģ���ơ�������ε��ԣ�ȷ���������IJ������£���1=0.5����1=0.5��k1=5����4=1����4=2��k4=5��c1=40��c2=60��c3=25��M=10��
Ҫ�������������(1��1��2)���˶���(3��3��5)����ƫ���ǵ������ֵ��d=45�㣬�����ָ����Ǻ�ת��ƽ��������0�㣬��������̬ƽ�ȡ�
��������ͼ2��ͼ3��ʾ����ͼ2��ͼ3��֪��������λ�ú���̬�Ǿ���9 s������������ֵ��
���ڵ�2.4�����Ƿ����ϵͳ������ʱȡ���Ʀס֦�d����������ý���ֵѡȡ�ĺ����ԡ�����ͼ3��ƫ���ǵı仯���߿�֪��ƫ����ͨ������Ӧ�ٶȺܿ죬��2 s���Ҵﵽ40�㣬������ֵ��89%��������ƫ�����ڿ���������������������Ǻ�������ʽ���֣�����Ϊϵ�����ڣ��ʸý���ֵ��ѡȡ�Կ�������Ӱ���С���Կ���Ч����Ӱ��Ҳ���Ժ��Բ��ơ�
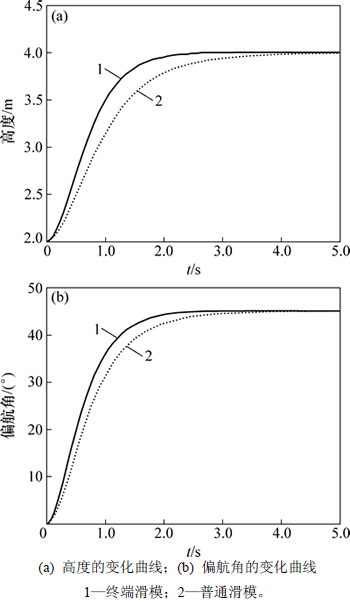
ͼ1 ��ͨ��ģ���ն˻�ģ����Ч���Ա�
Fig. 1 Comparison between sliding mode control and terminal sliding mode control
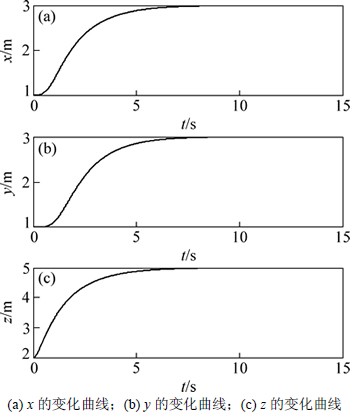
ͼ2 ��������λ��״̬��������
Fig. 2 Simulation results of position states of quadrotor

ͼ3 ����������̬�Ƿ�����
Fig. 3 Simulation results of attitude angles of quadrotor
����λ�ú���̬�ķ������߿�֪���������ڽ϶̵�ʱ���ڵ�������λ�ò���ͣ�ڸ�λ�ã������Ǻ�ת�DZ仯�ں�С�ķ�Χ�ڣ�˵��������������̬ƽ�ȣ��ʸû�ģ���������������������Ŀ�������Ч�ġ�
4 ����
1) ��������ɶ���������������һ���͵�Ƿ����������ϵͳ����ƻ�ģ�����������Ƚ�������ģ�ͷֳ�ȫ������Ƿ����ϵͳ2���֣�Ȼ�������2���ֱַ���ƻ�ģ����������ȫ����������ƻ���Backstepping�Ļ�ģ���ƺ�����ʱ���ն˻�ģ����2�ֿ���������Ƿ������������˼�����ʽ�Ļ�ģ���ơ�����Lyapunov�ȶ�����֤���˿���ϵͳ���ȶ��ԡ����ͨ����ֵ���������Ƶ�������Ʒ���������֤��֤���ÿ��Ʒ����ﵽ������Ķ�̬�������ܣ�������Ч�����ƶ���ķ�����
2) ��ȫ�������ֵ���ͨ��ģ���������ն˻�ģ�������Ľ����˷���Ƚϣ��ն˻�ģ���������������ٶȿ죬���ҿ���Ч�����á�
�ο����ף�
[1] YU Yali, SUN Feng, WANG Yuanxi. Controller design of quadrotor aerial robot[J]. Physics Procedia, 2012, 33: 1254-1260.
[2] ASHFAQ A M, WANG Daobo. Modeling and backstepping-based nonlinear control strategy for a 6 DOF quadrotor helicopter[J]. Chinese Journal of Aeronautics, 2008, 21(3): 261-268.
[3] NICOL C, MACNAB C J B, RAMIREZ-SERRANO A. Robust adaptive control of a quadrotor helicopter[J]. Mechatronics, 2011, 21(6): 927-938.
[4] BOUABDALLAH S, SIEGWART R. Backstepping and sliding-mode techniques applied to an indoor micro quadrotor[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain: IEEE, 2005: 2247-2252.
[5] XIA Guoyan, LIU Zhenghua. Quadrotor unmanned helicopter attitude control based on improved ADRC[C]//Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference. Yantai, China: IEEE, 2014: 916-921.
[6] RAFFO G V, ORTEGA M G, RUBIO F R. An integral predictive/nonlinear H�� control structure for a quadrotor helicopter[J]. Automatica, 2010, 46(1): 29-39.
[7] ZEGHLACHE S, SAIGAA D, KARA K. Backstepping sliding mode controller improved with fuzzy logic: application to the quadrotor helicopter[J]. Archives of Control Sciences, 2012, 22(3): 315-342.
[8] DIKMEN I C, ARISOY A, TEMELTAS H. Attitude control of a quadrotor[C]//Proceedings of the 4th International Conference on Recent Advances in Space Technologies. Istanbul, Turkey: IEEE, 2009: 722-727.
[9] XU Rong, OZGUNER U. Sliding mode control of a quadrotor helicopter[C]//Proceedings of the 45th IEEE Conference on Decision and Control. San Diego, California, USA: IEEE, 2006: 4957-4962.
[10] LEE D, KIM H J, SASTRY S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter[J]. International Journal of Control, Automation and Systems, 2009, 7(3): 419-428.
[11] ������. ���������η���������ϵͳ��Ƽ����Ʒ����о�[D]. ��ɳ: ������ѧ������ѧ���繤�����Զ���ѧԺ, 2007: 18-35.
WANG Junsheng. Design of control system and research on control method for the quad-rotor[D]. Changsha: National University of Defense Technology. College of Mechatronic Engineering and Automation, 2007: 18-35.
[12] BOUABDALLAH S. Design and control of quadrotors with application to autonomous flying[D]. Lausanne, Switzerland: Ecole Polytechnique Federale in Lausanne, 2007: 15-25.
[13] ������. ��ģ��ṹ����Matlab����[M]. ����: �廪��ѧ������, 2005: 35-36.
LIU Jinkun. Slide mode varying structure control Matlab simulation[M]. Beijing: Tsinghua University Press, 2015: 35-36.
[14] ������, ������. ����ʱ�������������[J]. ���������, 2011, 26(2): 161-169.
DING Shihong, LI Shihua. A survey for finite-time control problems[J]. Control and Decision, 2011, 26(2): 161-169.
[15] ����. ����Ƿ����������ϵͳ�Ļ�ģ������Ӧ��[D]. �人: ���пƼ���ѧ�Զ���ѧԺ, 2013: 17-21.
DING Feng. Sliding Mode control and application for underactuated robot systems[D]. Wuhan: Huazhong University of Science and Technology. College of Automation, 2013: 17-21.
(�༭ ����ƽ)
�ո����ڣ�2016-04-06�������ڣ�2016-06-18
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61573199��61573197)���������Ȼ��ѧ����������Ŀ(14JCYBJC18700)(Projects (61573199, 61573197) supported by the National Natural Science Foundation of China; Project (14JCYBJC18700) supported by the Natural Science Foundation of Tianjin City)
ͨ�����ߣ�����ǿ����ʿ�����ڣ���ʿ����ʦ�����¸���ϵͳ��ģ��������桢�������Ƶ��Ż�������о���E-mail��chenzq@nankai.edu.cn
ժҪ�����1�������ɶ�������ģ�ͣ���ƻ�ģ����������߿���ϵͳ��³���ԡ����Ƚ�������ģ�ͻ���Ϊȫ������Ƿ����2���֣�ȫ������ϵͳ�ɸ߶Ⱥ�ƫ����2��������·��ɣ���Ƿ������ϵͳ�����4����������2����������Ȼ�����ȫ����ϵͳ��2����·����˻��ڷ�����(Backstepping)�Ļ�ģ���ƣ�����һ���Ƶ�������ʱ���ն˻�ģ����������Ƿ������ϵͳд��һ�ּ������ͣ�������һ��Ƿ����������ʽ�Ļ�ģ������������Lyapunov�ȶ�������֤������ƵĻ�ģ����ϵͳ���ȶ��ԡ��о���������������������������������Ч�ģ��������������õ�³���ԺͿ��ٸ��ٶ�̬���ܣ������ܹ���Ч�����ƶ�������
