J. Cent. South Univ. Technol. (2008) 15: 535-539
DOI: 10.1007/s11771-008-0101-0
Reducing-resistance mechanism of
vibratory excavation of hydraulic excavator
ZHU Jian-xin(朱建新),YANG Cheng-yun(杨成云), HU Huo-yan(胡火焰), ZOU Xiang-fu(邹湘伏)
(School of Mechanical and Electronic Engineering, Central South University, Changsha 410083, China)
Abstract: Based on the working principle of vibratory excavation of hydraulic excavator, the expression of digging resistance changed with time under sine wave inspiritment was deduced; a comparison analysis was given after calculating the forces status of rock and soil under static load and vibratory load respectively by using MATLAB; and then RFPA-2D(rock failure process analysis code) was used to make comparison of simulation experiment on rock and soil failure process under static load and vibratory load. The results demonstrate that, compared with the normal excavation under the same situation, the digging resistance and the energy consumption can be reduced by respectively 30% and 60% at maximum, and that the working efficiency can be increased by 45% at maximum owing to vibratory excavation.
Key words: hydraulic excavator; vibratory excavation; reducing-resistance mechanism; simulation
1 Introduction
Energy saving and intelligence level of hydraulic excavator have become a focus research in the world, and the technology of vibratory excavation which targets on reducing the digging resistance and decreasing the energy consumption attracts more and more attention. For example, KEITH and BRAMMER[1] did research on vibration of the bucket edge of bulldozer; YIN et al[2] did research on vibratory shovel loader; WILHELM[3] did research on oscillating subsoiler; HORN et al[4] and NAQQAR et al[5] did research on oscillating plow body; QIU and LI[6] did research on vibration subsoiler system of ISQ-127 model of bulk subsoiler; ZHAO et al[7] did research on cutting rock and soil with super high frequency, MURO and TRAN[8] did researches on vibratory cutting tuff; ZHU et al[9] did some research on vibratory excavation of hydraulic excavator. They all concluded that vibratory excavation can distinctly reduce digging resistance, decrease energy consumption and enhance working efficiency. In this work, further study on the vibratory excavation to search the reducing- resistance mechanism during vibratory excavation was made by analysis, simulation and experiment.
2 Excavation mechanism
2.1 Normal excavation
During the normal excavation, the horizontal cutting resistance (fx), the cutting speed(v) in x-direction and the horizontal displacement(x) of cutting tools can be calculated based on the empircial formula[6-11] as follows:
fx=c(1+dve)xg=9.10(1+1.68v7.68)x1.48 (1)
The values of c, d , e and g are normally decided by experiment or based on experience. Usually, the four parameters are set as follows: 8.0≤c≤10.5, 0.8≤d≤2.3, 6.5≤e≤8.2, 0.6≤g≤2.0. When the cutting speed, v=0.95 cm/s, the cutting depth, z=0.8 cm, the forward angle of cutting tools, α=20?, and the horizontal dis- placement, x=0-0.3 cm, the relationship between cutting resistance and horizontal displacement can be described as Fig.1, which was simulated by MATLAB[12-14].

Fig.1 Relationship between horizontal cutting resistance and horizontal cutting displacement of normal excavation
2.2 Vibratory excavation
Vibratory excavation is a new technique which imposes a kind of regular vibration on cutting tools during the operation of normal excavation, the imposed vibration can be controlled by several parameters. The forces on tool during the cutting process are shown in Fig.2. In Fig.2, f is the cutting resistance; fx is the cutting resistance in x-direction; fz is the cutting resistance in z-direction; v is the cutting speed; fh is the vibratory frequency; a is the amplitude; α is the forward angle of cutting tools and δ is the angle between horizontal plane and cutting resistance f.

Fig.2 Cutting resistance model of vibratory excavation
Supposing that a kind of sine vibration load is added on cutting tool during the cutting process, the relationship between the cutting distance and the cutting speed in x-direction in one vibratory cycle could be expressed as follows:
x=vt+asin(ωt) (2)
After the differential of Eqn.(2), the equation
 (3)
(3)
is obtained, where ω is the angular speed corresponding to some vibratory frequencies.
So, the relationship between cutting distance and cutting speed changed with time can be shown in Fig.3. Fig.3 indicates that cutting tools make an effective excavation only from point O to point A or from point C to point D. Cutting tools back off and do not cut soil between point A and point B. From point B to point C, cutting tools re-cut the former cutted soil and do not cut any new soil. If we set Eqn.(3) to zero, the coordinate values of points A and B can be calculated by the following equations.
 (4)
(4)
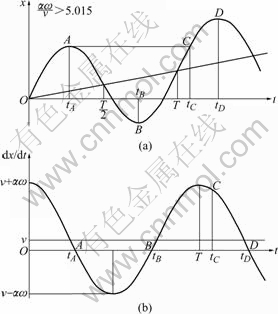
Fig.3 Relationship between cutting distance (a), cutting speed (b) and cutting time for vibration excavation
 (5)
(5)
Obviously, the cutting distance at point C is the same as that at point A and can be calculated by the following equation:
 (6)
(6)
Similarly, the coordinate value at point D can be calculated by the following equation:
 (7)
(7)
As shown in Fig.3, in terms of the results above, it is concluded:
 (8)
(8)
So the mathematic equation of the distance curve between points C and D can be concluded as follows:
xCD=vt+asin(ωt), tC≤t≤tD (9)
where xCD is the effective cutting distance in the process of vibratory excavation in a vibrating cycle, excluding the back-off and re-cutting part.
Combining v=v+aωcos(ωt) and x=vt+asin(ωt)-xa with Eqn.(1), the relationship between cutting resistance and cutting time under sine vibratory excavation can easily be gotten as follows:
fx(t)=c[1+d(v+aωcos(ωt))e][vt+asin(ωt)]g, tC≤t≤tD (10)
In order to make a comparison between vibratory excavation and normal excavation, we simulated the relationship between cutting resistance fx and horizontal cutting distance x by MATLAB under the condition of v=0.95 cm/s, z=0.8 cm, α=20? and fh=10 Hz; and other parameters were chosen as follows: c=9.10, d=1.68, e=7.68, g=1.48, ω=2πfh. The simulation results are shown in Fig.4.

Fig.4 Relationship between horizontal cutting resistance and horizontal cutting distance for vibratory excavation
As can be seen from Fig.1 that the maximum digging resistance is 2.0 kN and the rock sample is supposed to be destroyed when z=0.22 cm in normal excavation. As can be seen from Fig.4 that the maximum digging resisitance is about 1.4 kN and the rock sample is supposed to be destroyed when z=0.12 cm in vibratory excavation. So we can conclude that vibratory excavation can reduce the digging resistance nearly by 30% and increase the working efficiency nearly by 45% compared with that of normal excavation. From the curves integration along with axis x of Fig.1 and Fig.4, we can conclude that the energy consumption of vibratory excavation can be decreased nearly by 60% under the same situation.
3 Simulation experiment on vibratory ex- cavation
In order to do further analysis and make detailed comparison between vibratory excavation resistance and normal excavation resistance, the soil cutting process was simulated by using the software of RFPA-2D (rock failure process analysis code developed by Northeastern University). The rock’s loading mechanics model is shown in Fig.5.

Fig.5 Static loading mechanical model for vibratory excavation
In normal excavation, we added an invariable load of 10 MPa in the y-direction. In the x-direction, load mode controlled by the displacement was adopted and the loading function was x=0.05N, in which N is the loading step. Fig.6 shows that there are totally 100 loading steps with a step of 0.05 mm, and the simulation result is shown in Fig.7.

Fig.6 Relationship between distance in x-direction and loading step in normal excavation
In order to research the soil failure process and the effect under vibratory load, we made a comparative experiment. We chose the rock whose characteristic was the same as that of normal excavation in order to guarantee the reliability about the experiment result.
In the course of vibratory excavation, an invariable load of 10 MPa was added in the y-direction. In the x-direction, the load mode controlled by the displacement was adopted and the loading function was x=0.05N+asin(ωt). As shown in Fig.8, there are totally 100 loading steps with an increment of 0.05 mm. The simulated result is shown in Fig.9.

Fig.7 Relationship between load in x-direction and loading step in normal excavation

Fig.8 Relationship between distance in x-direction and loading step in vibratory excavation
By contrasting the results of simulation, the conclusions can be concluded as follows.
1) Under the same conditions, the rock is supposed to fail rapidly under complicated stress which changes sharply under the given vibratory loads. Under static loads, the rock sample does not fail until 21th step. However, the same rock sample fails at 11th step under vibratory load. It indicates that vibratory load is more efficient than static load.
2) Under the same conditions, the vibratory load can rapidly reduce digging resistance. Just as shown in Fig.7 and Fig.9, the digging resistance under vibratory load is about 70% of that under static load.
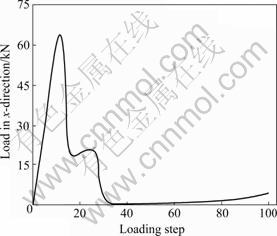
Fig.9 Relationship between load in x-direction and loading step
4 Conclusions
1) The destroying process for rock and soil under static load varies gradually. Rock and soil will be destroyed only when the main stress goes beyond its intensity limit.
2) Under the effect of vibratory loads, the intensity of rock and soil can be reduced and rock and soil can be destroyed below its destroy intensity limit.
3) In the process of vibratory cutting, because the instantaneous cutting speed is increased, and vibration acts on rock by means of dynamic wallop, the local distortion is reduced, the cutting force is centralized and instantaneous cutting force is increased.
4) Vibratory excavation can reduce the digging resistance nearly by 30%, increase the working efficiency nearly by 45% and decrease the energy consumption nearly by 60% under the same conditions compared with that of normal excavation. However, the result is based on characteristic of the vibratory frequency, the cutting speed and the swing. It needs further research on the result with variable parameters.
References
[1] KEITH S E, BRAMMER A J. Rock drill handle vibration: Measurement and hazard estimation [J]. Journal of Sound and Vibration, 2001, 174(4): 475-491.
[2] YIN Yong-guang, LI Jun-ming, WANG Guo-qiang. An experimental study on two-dimension vibratory cutting soil [J]. Transactions of the Chinese Society of Agricultural Machinery, 1994, 25(2): 18-23. (in Chinese)
[3] WILHELM J K. Novel, low-vibration excavation techniques for underground radioactive waste storage [C]// High Level Radioactive Waste Management-Proceedings of the Annual International Conference. Las Vegas: American Society of Civil Engineering, 2004: 417-429.
[4] HORN R, VOSSBRINK J, PETH S, BECKER S. Impact of modern forest vehicles on soil physical properties [J]. Forest Ecology and Management, 2007, 248(5): 56-63.
[5] NAQQAR E I, HESHAM M, GHAFAR C A. Vibration barriers for shock-producing equipment [J]. Canadian Geotechnical Journal, 2005, 42(1): 297-306.
[6] QIU Li-chun, LI Bao-fa. Experimental study on the self-excited vibration subsoiler for reducing draft force [J]. Transactions of the Chinese Society of Agricultural Engineering, 2000, 16(6): 71-76. (in Chinese)
[7] ZHAO Wei-min, ZHOU Xian-biao, LU Nian-li, LI Yi-shen. The basic research of vibratory cutting soil [J]. Construction Machinery, 2000(6): 56-60. (in Chinese)
[8] MURO T, TRAN D T. Regression analysis of the characteristics of vibratory cutting blade for tuffaceous rock [J]. Journal of Terramechanics, 2004(40): 191-219.
[9] ZHU Jian-xin, ZHAO Chong-you, ZOU Xiang-fu. Identification of soil parameters on vibratory excavation of hydraulic excavator [J]. Journal of Central South University: Natural Science, 2006, 37(3): 537-541. (in Chinese)
[10] HUANG J S, PENG C Q, ZHANG S Q, HUANG B Y. Lead free cutting copper alloys [J]. The Chinese Journal of Nonferrous Metals, 2006, 16(9): 1486-1493. (in Chiense)
[11] YUAN Qi-long, LI Yan, XIAO Ji-ming, ZHU Jian-xin, LI Peng- yang. Cutting-press compound shaping technique [J]. The Chinese Journal of Nonferrous Metals, 2005, 15(6): 860-864. (in Chinese)
[12] HUANG Wen-mei. System simulation analysis and design [M]. Changsha: National University of Defence Technology Press, 2001: 313-317. (in Chinese)
[13] TANG Chun-an, ZHAO Wen. Rock failure process analysis software system RFPA-2D [J]. Chinese Journal of Rock Mechanics and Engineering, 1997, 16(5): 507-508. (in Chinese)
[14] HUANG Jin-song, PENG Chao-qun, ZHANG Si-qi, HUANG Bai-yun. Lead free cutting copper alloys [J]. The Chinese Journal of Nonferrous Metals, 2006, 16(9): 1486-1493. (in Chinese)
Foundation item: Project(2003AA430200) supported by the National High-Tech Research and Development Program of China
Received date: 2008-01-21; Accepted date: 2008-04-05
Corresponding author: ZHU Jian-xin, PhD, Professor; Tel: +86-731-8836046; E-mail: myb8000@yahoo.com.cn
(Edited by YANG Hua)

