机车车辆半主动悬挂控制系统的研究
熊勇刚1,2,谢 勇1,丁问司3,贺微波1,姜晓靖4,陈科良1
(1.株洲工学院 机械工程系,湖南 株洲,412008; 2.中南大学 机电工程学院,湖南 长沙, 410083;
3.华南理工大学 汽车学院,广东 广州,510640;
4.益阳公路桥梁建设有限责任公司,湖南 益阳, 413000)
摘要: 为解决我国铁路提速后提速机车与动力车普遍存在的横向平稳性能不佳而难以适应列车在高速运行时对平稳性的要求的问题,对二系横向悬挂系统采用半主动悬挂方式,研究了机车车辆横向半主动悬挂系统的控制策略、横向天棚减振控制原理及其电子控制系统构成。研究结果表明:此控制系统采用比PID控制更便捷的控制方法,可实现横向阻尼调节,结构相对简单,实时性好,价格低廉且能耗低,控制简单,失效导向安全性良好,在此系统控制下,半主动减振器能够实现阻尼系数的在线连续调节;此系统在减振器试验台上与半主动减振器的联合实验和仿真计算所得横向平稳性指标分别为2.894和2.746,表明控制系统工作稳定,能满足控制要求,车体运行的平稳性优于被动悬挂系统。
关键词: 机车车辆; 半主动悬挂; 控制系统
中图分类号:TP273; U463.33 文献标识码:A 文章编号: 1672-7207(2005)04-0678-05
Research on electronic control system in railway vehicle semi-active suspension
XIONG Yong-gang1,2,XIE Yong1,Ding Wen-si3,HE Wei-bo1,JIANG Xiao-jing4,CHEN Ke-liang1
(1.School of Mechanical Engineering, Zhuzhou Institute of Technology,Zhuzhou 412008,China;
2.School of Mechanical and Electronical Engineering, Central South University, Changsha 410083, China;
3.Automoble College, South China University of Technology, Guanzhou 510640, China;
4. Highway and Bridge Construction Corporation Limited, Yiyang 413000, China)
Abstract: In order to solve the poor traverse stability in locomotive and powercarsater which does not satisfy the demand of stability when the train speed is increased, the semi-active suspension in the secondary active suspension was applied. The strategy of lateral shyhook control principle and electronics control system was studied, whose control method is more advanced than PID, and its locomotive semi-active traverse suspension system is low in energy consumption. It is simple to be controlled and is good in effective guiding safety, which can exercise traverse control regulation with good real time. With this controller, damp coefficient of semi-active damper can be changed steplessly on line. The results of the combined test of shake-reducing platform test and semi-active shake-reducer and the simulated computation demonstrate that traverse stability index is 2.849 and 2.746, respectively, which shows the system is more reliable and superior than the passive suspension.
Key words: railway vehicle; semi-active suspension;control system
机车车辆的悬挂系统与其2个主要性能即平稳性和稳定性密切相关。传统的被动悬挂系统由于其弹性元件和阻尼元件的参数不能实时调节,因而不能使机车车辆的乘坐平稳性和操作舒适性同时达到最优[1-5]。全主动悬挂系统结构复杂,成本高,难以应用;阻尼可调的半主动悬挂系统与全主动悬挂系统相比,虽然对振动控制的性能略差,但其结构相对简单,价格低廉。在目前机车车辆营运速度迅速提高的情况下,采用阻尼调节的半主动悬挂系统应用前景广阔[2,3]。
1 控制系统策略
“天棚”阻尼控制是悬挂系统半主动控制最常用的方法,该方法简单有效,易于实施,其原理如图1所示。其中:Cs为天棚减振器阻尼系数;Cr为实际减振器阻尼系数;Fs为天棚减振器阻尼力;Fr为实际减振器阻尼力;v1为车体横向速度;v2为转向架横向速度。
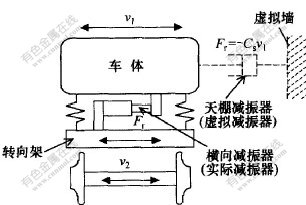
图 1 横向天棚减振控制原理
Fig. 1 Control principle diagram of traverse shyhook shake-reducing
假设机车车辆沿一道虚拟的刚性墙移动,在虚拟墙与车体之间通过虚拟减振器的作用来减小车体振动,此虚拟减振器即天棚阻尼减振器。按天棚原理,天棚阻尼减振器在机车车辆运行时需始终处于工作状态以提供减振力。由于天棚阻尼减振器是虚拟的,故其实际应提供的减振力只能由安装在车体与转向架间的实际横向减振器来模拟实现[6,7]。
机车车辆横向振动半主动控制的天棚控制规则为:

按式(1)设计的悬挂系统为连续变化阻尼的半主动悬挂系统。为满足控制规则要求,实际横向减振器的阻尼不但要能在“可提供”与“不提供”之间不断切换,而且由于实际横向减振器能提供的阻尼力只能为Fr=C*r(v1-v2),为使Fr=Fs,必须要求Cr=Csv1/(v1-v2)。由于v1和v1-v2是连续变化的,因此,实际横向阻尼减振器的阻尼系数Cr也连续变化。
2 控制系统硬件结构
所采用的横向半主动悬挂系统为闭环控制系统,其控制系统结构如图2所示。
控制系统硬件主要包括横向加速度传感器、单片机及其扩展模块(包括看门狗电路)、放大及滤波模块、采样保持与数模转换模块、输出与驱动模块。压电式加速度传感器采集的车体横向加速度信号通过电荷放大器放大,再通过采样保持和A/D转换把模拟信号转换为数字信号,将数字信号输入单片机进行数据处理(积分、去平均值)并按一定的控制规则产生控制信号,以驱动电磁阀实现阻尼调节,从而改善悬挂性能[8-11]。
2.1 控制系统核心
控制系统实施控制的过程中,需要对车身的横向加速度信号进行计算和处理。车体横向振动的主要频率范围为1~4 Hz,属低频信号,故对控制系统核心的要求并不高,采用常用的MCS-51系列芯片[CM(22] 即可满足要求。在研究过程中,本系统实际采用
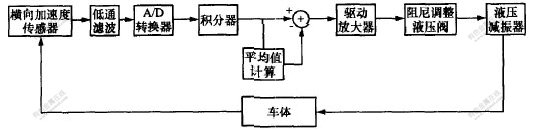
图 2 控制系统结构
Fig. 2 Construction of control system
ATMEL公司生产的8位Flash单片机89C52,由于其带有8K可改写的Flash内部程序存储器,故避免了在系统内采用外围扩展程序存储器EPROM,简化了系统。
2.2 采样与滤波模块
天棚减振器根据车体横向振动速度产生减振力,但横向振动的绝对速度无法测量,只能通过测量其振动加速度再通过积分来获得所需要的车体横向速度。机车车辆行驶过程中钢轨和道岔的冲击不可避免,势必引起车体加速度突变,突变产生的脉冲信号必然引起由质量、弹簧、阻尼组成的加速度传感器二阶系统的振荡,积分时振荡信号将引起较大的计算误差。这种误差的大小取决于加速度传感器的固有频率和相对阻尼系数。为减小此类误差,应尽可能采用高性能的加速度传感器。
在实际应用中,车体的运动形式和外界干扰使加速度测量信号中有较多的高频成分,这将造成信号不稳定,影响速度信号的恢复,有必要在检测系统中采用低通滤波器,以滤去高频成分。
根据TB/T 2360―93,以总加权加速度均方根值作为评价平稳性指标时,选用的频率范围为1~80 Hz。若采用电路滤波,按Butterworth滤波器,其原理如图3所示。
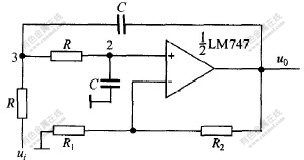
图 3 滤波电路
Fig. 3 Filter wave circuit
电路的传递函数为:
式中:
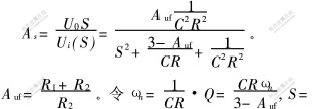
jω,则幅频特性和相频特性为:
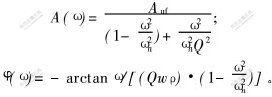
由Butterworth滤波器特性,3 dB时的截止频率为80 Hz,取R=10 kΩ,则C=0.20 μF,取Q=  ,则Auf=3-1/Q。取R2=10 kΩ,R1=5.86 kΩ。
,则Auf=3-1/Q。取R2=10 kΩ,R1=5.86 kΩ。
2.3 采样保持与A/D转换模块
在处理低频连续信号时,对A/D转换器的转换速度要求并不高。但由于CPU是8位微处理器,计算时存在一定误差,因此,要求A/D转换器的量化误差尽可能小。考虑到实际运用,A/D转换器选用12位转换精度的AD574A,其转换时间为25 μs,可与8位单片机直接对接。另外,为提高A/D转换器的转换精度,控制系统中采用采样保持器AD582。A/D转换的接口电路如图4所示。
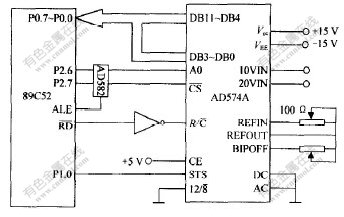
图 4 采样保持与A/D转换接口
Fig. 4 Sampling maintains and change interface with A/D
2.4 看门狗电路
在半主动悬挂控制系统中,为避免系统受干扰而失控,除编程时设立必要的程序“陷阱”外,还有必要设立看门狗电路。在本研究中,控制系统采用的看门狗电路是MAX816芯片,CPU的一个输入/输出端定时向芯片发信号,一旦芯片在设定的时间内未接受到CPU的信号,则向CPU发出复位信号,使控制程序重新开始。MAX816与89C51的接口电路如图5所示。
2.5 比例控制放大器
悬挂系统的阻尼调节最终需要通过对比例液压阀的动作调整来实现。比例控制放大器是对比例电磁铁提供特定性能电流,并对比例阀进行调节的装置。它必须具有良好的稳态控制特性,较宽的响应频带和较强的抗干扰能力。
在所研制的半主动悬挂控制系统中,控制放大器为数字型双通道比例放大器,它可独立接受2路模拟信号、4路数字信号的输入,可同时对2个电磁铁实施控制。横向悬挂系统中仅需采用2个这样的控制放大器即可满足1台车的悬挂系统要求。
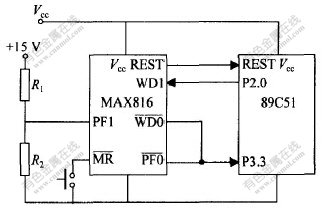
图 5 MAX816与89C51的接口电路
Fig. 5 Interface circuit of MAX816 and 89C51
放大器的功率放大级采用脉宽调制(PWM)形式,功放管始终工作在饱和区或截止区,功耗大大降低,电路板热负荷小,散热装置体积小。为降低比例电磁铁的摩擦滞环,控制器还在控制信号上叠加了正弦颤振信号,且颤振信号的频率和幅值可独立调节,以适应由于受机械加工工艺水平的限制而造成的电磁阀性能不一致性。与常规的比例控制器不同,为适应悬挂系统的振动频率,本控制器不提供斜波信号电路,以简化电路系统。为方便实验研究,控制器还可通过串行口(RS232)与台式计算机连接,并通过专用软件实施参数的快速调整。
2.6 自诊断系统
自诊断系统是半主动悬挂控制系统的重要组成部分,其主要功能是利用CPU对控制系统的检测部件、控制部件和执行器件各自功能障碍进行测试,并将故障诊断结果通过一定方式予以显示和报警。本研究研制的控制系统以液晶显示屏显示和发光二极管不同闪烁的2种形式来反映系统正常、加速度传感器故障、电源故障和比例放大器故障等控制器状态。
3 软件设计
本控制器系统中软件设计采用以汇编语言为主,C51为辅的设计方法。对较复杂函数的计算先由C51编程实现,之后转为汇编代码,最后经优化处理后作为子程序加入。软件设计采用模块化结构,按不同的功能建立子程序。程序设计时,尽可能减少从采样到控制量输出之间的代码,以降低计算延时对控制效果的不利影响[11-14]。
控制系统软件主要包括初始化、看门狗、采样及数据转换、PID调节、比例阀驱动等模块,其主程序流程如图6所示。
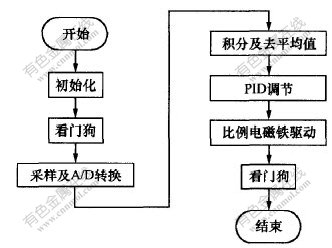
图 6 控制器主程序框图
Fig. 6 Main program of controller
4 控制系统调试
为提高控制器系统的性能,优化系统结构,对电源模块、滤波模块、数模转换模块、单片机及其扩展模块、比例控制器等分别进行测试,适当修改并整合后进行整体测试。在减振器试验台上与半主动减振器进行联合实验和仿真计算,所得横向平稳性指标分别为2.894和2.746[15],表明控制系统工作稳定,能满足控制要求。
5 结 语
a. 介绍了机车车辆横向半主动悬挂系统的控制策略、横向天栅减振控制原理及电子控制系统构成。
b. 此控制系统采用比PID控制更为便捷的控制方法,可实现横向阻尼调节,结构相对简单,实时性好,价格低廉,能耗低,控制简单,失效导向安全性好。在此系统控制下,半主动减振器能够实现阻尼系数的在线连续调节。
参考文献:
[1]丁问司,卜继玲,刘友梅.我国高速列车横向半主动悬挂系统控制策略及控制方式[J].中国铁道科学, 2002,23(4): 1-4.
DING Wen-si, PU Ji-ling, LIU You-mei. Strategy and method of high speed train suspensions lateral semiactive control in China [ J ]. Chinese Railway Science, 2002, 23(4): 1-4.
[2]涂时亮,张友德.单片微机控制技术[M]. 上海:复旦大学出版社,1995: 33-35.
TU Shi-liang, ZHANG You-de. The only flat control technology of personal computer [ M ]. Shanghai: Fudan University Press, 1995.
[3]张庙康,胡海岩.车辆悬架振动控制系统研究的进展[J]. 振动、测试与诊断, 1997, 17(1):6-8.
ZHANG Miao-kang,HU Hai-yan. The progress of vehicle suspension vibration control system studies [ J ]. Journal of Vibration,Measurement and Diagnosis, 1997, 17(1):6-8.
[4]丁建新,马国新.汽车主动悬挂控制理论研究[J]. 兵工学报, 2000, 79(3): 56-58.
DING Jian-xin, MA Guo-xin. Study on control of vehicle active suspensions[J]. Acta Armamentar, 2000,79(3):.56-58.
[5]张玉春,王良曦,丛华.汽车主动悬挂控制的研究现状和未来挑战[J].控制理论与应用, 2004 ,21(1):140-143.
ZHANG Yu-chun,WANG Liang-xi,CONG Hua.Present situation and future challenges for automobile active suspension control[J]. Control Theory and Applications, 2004, 21(1):140-143.
[6]伍玉刚.O. Zbekiston 交流传动电力机车二系悬挂系统的设计[J]. 电力机车与城轨车辆, 2004, 27(2):23-26.
WU Yu-gang. Electric locomotives and transit vehicles design of the secondary suspension system for O. Zbekiston locomotive[J]. Electric Locomotives and Mass Transit Vehicles, 2004, 27(2): 23-26.
[7]Sarma G N, Kozin F. An active suspension system design for the lateral dynamics of a high-speed wheel-rail system[J]. Journal of Dynamic Systems Measurement and Control, 1971, 36: 233-241.
[8]戴焕云,沈志云.车辆主动悬挂的鲁棒控制研究[R].成都: 西南交通大学机械工程学院,1999:56-62.
DAI Huan-yun, SHEN Zhi-yun. The research on robust control of vehicle active suspension[R]. Chengdu: School of Mechanical Engineering, Southwest Jiaotong University, 1999: 56-62.
[9]Celiniker G W, Hedrick J K. Rail vehicle active suspensions for lateral rial and stability improvement[J].Transaction of ASME, 1982, 104(3):100-106.
[10]Karnopp D. Active damping in road vehicle systems[J]. Vehicle System Dynamics, 1983, 12: 291-316.
[11]Karnopp D C, Grosby M J, Harword R. Vibration control using semi-active force,generator[J]. Transaction of ASME, 1974,96(2):619-626.
[12]Stribersky A ,Kienberger A.Wagner G, et al. Design and evaluation of a semi-active damping system for rail vehicles[J].Vehicle System Dynamics,1998,29:669-681.
[13]黄兴惠,赵六奇.汽车主动悬架的实验研究及系统鲁棒稳定性分析与设计[R].北京:清华大学机械工程学院,1999:26-28.
HUANG Xin-hui, ZHAO Liu-qi. Experimental research of vehicle active suspension and analysis and design of system stability robustness[R]. Beijing: School of Mechanical Engineering, Tsinghua University, 1999:26-28.
[14]刘少军,李艳.基于1/2车辆模型主动悬架预先控制方法的研究[J]. 信息与控制, 2000, 29(1): 6-13.
LIU Shao-jun, LI Yan. Study on anticipated control method pertinent to active suspension based on a half-car model[J]. Information and Control, 2000,29(1): 6-13.
[15]丁问司,卜继玲.铁道车辆横向开关半主动悬挂系统研究[J].机械工程学报, 2004, 40(9):162-170.
DING Wen-si,PU Ji-ling. Research on lateral on-off semi-active suspensions of railway vehicle[J].Chinese Journal of Mechanical Engineering, 2004,40(9):161-164.
收稿日期:2005-02-18
基金项目:广东省自然科学基金资助项目(04300105)
作者简介:熊勇刚(1966-),男,湖南株洲人,副教授,博士研究生,从事机械设计与理论的研究
论文联系人: 熊勇刚,男,副教授,博士研究生;电话:0733-2622949(O), 13973336280(手机); E-mail: xygyxj@163.com

