Neuron PI control for semi-active suspension system of tracked vehicle
来源期刊:中南大学学报(英文版)2011年第2期
论文作者:曾谊晖 刘少军 鄂加强
文章页码:444 - 450
Key words:tracked vehicle; magneto rheological damper; semi-active suspension; preview technology; neuron PI control
Abstract: A neuron proportion integration (PI) control strategy for semi-active suspension system of tracked vehicle was proposed based on its unique structure and the multiple and complex environment of the driving traffic. An adaptive genetic algorithm is used to optimize the parameters of the neuron PI controller. The simulation result of the neuron PI control for semi-active suspension system of tracked vehicle indicates that the vertical amplitude, pitch angle and vertical acceleration of the vehicle are well controlled. The root mean square (RMS) of the vertical amplitude decreases by 37.2%, and 45.2% for the pitch angle, 38.6% for the vertical acceleration. The research of neuron PI control experiment for the semi-active suspension system of the tracked vehicle model mining in benthal indicates that the RMS of the weight acceleration vibrating along the vertical direction decreases by 29.5%, the power spectral density resonance peak of the acceleration of the car body decreases by 23.8%.
J. Cent. South Univ. Technol. (2011) 18: 444-450
DOI: 10.1007/s11771-011-0716-4![]()
ZENG Yi-hui(曾谊晖)1, 2, LIU Shao-jun(刘少军)1, E Jia-qiang(鄂加强)3
1. College of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. Computer Numerical Control Tooling Center, Hunan International Economics University,
Changsha 410205, China;
3. College of Mechanical and Vehicle Engineering, Hunan University, Changsha 410082, China
? Central South University Press and Springer-Verlag Berlin Heidelberg 2011
Abstract: A neuron proportion integration (PI) control strategy for semi-active suspension system of tracked vehicle was proposed based on its unique structure and the multiple and complex environment of the driving traffic. An adaptive genetic algorithm is used to optimize the parameters of the neuron PI controller. The simulation result of the neuron PI control for semi-active suspension system of tracked vehicle indicates that the vertical amplitude, pitch angle and vertical acceleration of the vehicle are well controlled. The root mean square (RMS) of the vertical amplitude decreases by 37.2%, and 45.2% for the pitch angle, 38.6% for the vertical acceleration. The research of neuron PI control experiment for the semi-active suspension system of the tracked vehicle model mining in benthal indicates that the RMS of the weight acceleration vibrating along the vertical direction decreases by 29.5%, the power spectral density resonance peak of the acceleration of the car body decreases by 23.8%.
Key words: tracked vehicle; magneto rheological damper; semi-active suspension; preview technology; neuron PI control
1 Introduction
Good suspension system is an important safeguard for tracked vehicles to ensure high flexibility, traffic ability characteristic and crew discomfort. Theoretically, the function of the complete-active suspension system is superior to that of the semi-active one. But, there are many technical matters to be solved. Compared with the complete-active suspension, the semi-active one has the following characteristics as simple structure, low energy consumption, high reliability and the similar performance in suspension characteristics as the active suspension [1-2]. The suspension system buffer and damping performance of military caterpillar vehicles have a large effect on the fighting capability and shooting accuracy of vehicle occupants. The intelligent suspension using semi-active suspension control scheme is the main trend for tracked vehicle suspension system [3-7].
From the current situation, the research of semi-active suspension system applied to caterpillar vehicles is mainly concentrated on actuators and control strategy. For actuators, more researches have been attached on air spring with adjustable stiffness, shock absorber with adjustable damping and the magneto- rheological (MR) damper and electro-rheological damper [8-12]. The most referred control strategies are ceiling control, optimal control, fuzzy control, adaptive control, neural network control and compound control or its optimization etc [13-17]. Suspension system of tracked vehicle is a complex uncertain system with time-varying, nonlinear and strong coupling. Therefore, the general single control algorithm is difficult to get the desired results. Considering the multiple and complex driving traffic and its unique structure, an intelligent hybrid control method of active suspension of tracked vehicle based on MR damper was proposed.
2 Semi-active suspension system of tracked vehicle model
2.1 Supposition on semi-active suspension system of tracked vehicle model
A tracked vehicle is bound to pitch seriously when traveling on rough pavements, and its upright vibration acceleration will increase under a high speed, which leads to a high frequency of hitting peneumatied device on balanceable situation. As a result, the extreme driving speed of the body is limited largely. A suspension system model including the centroid amplitude swing of the tracked vehicle, pitch angle and vertical acceleration of the vehicle’s body is established, considering the multiple and complex driving traffic and its unique structure. This work is to improve the average speed and operating stability of tracked vehicle during cross- country running by intelligent control strategy. Using a MR damper can make sure that the suspension varies with the change of pavement automatically in research of vibration control of semi-active vehicle suspension. So, we make the following assumptions especially.
1) The tracked vehicle travels on different pavement evenly.
2) The bodywork is bilaterally symmetric along the y-axis; the elastic center of the whole body superposes the focus; the input of the pavement roughness on both sides is synchronous.
3) Suspensions are linear and independent; the stiffness of the elastic components of suspension system and the damping factor of damper assy can be added to the weighted axles linearly.
4) Caterpillar is regarded as massless, continuous soft belt, without consideration of the effects of the track on vibration.
5) The damping force, the elastic force and gravity loaded on each wheel all act on the center of the wheels.
The following semi-active suspension system of tracked vehicle model can be established, as shown in Fig.1 based on the above assumptions, where Mb represents the mass of car body; I represents the moment of inertia; ![]() represents the pitch angle; mwi represents the quality of the loading wheel; kwi represents the equivalent stiffness between the loading wheels and the pavement; kbi represents the equivalent stiffness between the loading wheels and the car body; cbi represents the equivalent damp between the loading wheels and the car body; li represents the distance between the loading wheels and the body mass; zb represents the vertical shift of the car body; zwi and zri represent the vertical shifts of the loading wheels and the pavement excitation, respectively. mw=mwi, kw=kwi, kb=kbi, cb=cbi, i=1, 2, …, 6.
represents the pitch angle; mwi represents the quality of the loading wheel; kwi represents the equivalent stiffness between the loading wheels and the pavement; kbi represents the equivalent stiffness between the loading wheels and the car body; cbi represents the equivalent damp between the loading wheels and the car body; li represents the distance between the loading wheels and the body mass; zb represents the vertical shift of the car body; zwi and zri represent the vertical shifts of the loading wheels and the pavement excitation, respectively. mw=mwi, kw=kwi, kb=kbi, cb=cbi, i=1, 2, …, 6.
2.2 Differential equations of semi-active suspension system of tracked vehicle
From Fig.1, the system of differential equations of the semi-active suspension of tracked vehicle can be gotten with 1/2 track as
 (1)
(1)
where i=1, 2, …, 6; ![]() and
and ![]() represent the acceleration and speed of the car body and the loading wheels, respectively;
represent the acceleration and speed of the car body and the loading wheels, respectively; ![]() and
and ![]() represent the pitching angle acceleration and angular of the car body.
represent the pitching angle acceleration and angular of the car body.
2.3 State equation of semi-active suspension system of tracked vehicle
Choosing the following state variable:
![]()
![]() (2)
(2)
and choosing the following output variable:
![]() (3)
(3)
the following state-space representation is got:
![]() (4)
(4)
where the material representation of matrix A16×16, B16×6, C9×6, D9×6 and F16×6 can be gained from Eqs.(1) and (3).

Fig.1 Semi-active suspension model of half tracked vehicle
A6×1 and u6×1 can be confirmed as
![]() (5)
(5)
![]() (6)
(6)
where ui represents the adjustable controlling damping force generated by the magneto-rheological damper from the i-th loading wheel, which can change from umin to umax.
Since the coulomb damping force can be looked as a changeless part in the working process of the MR damper and the adjustable viscous damping force uF changes with the current strength II in the regulating coil in the damper, their relation can be expressed as
![]() (7)
(7)
where N represents the turns per coil; h represents the clearance between the piston and the housing; α represents the experimental parameters; L represents the effective length of the piston; D represents the inside diameter of the housing; d represents the diameter of the piston shaft.
3 Design of neuron PI controller for semi- active suspension system of tracked vehicle
Firstly, the non-linearity PI controller was formed by a memoryless non-linearity compensation part based on the PI controller. Then, the scale factor of the neuron was adjusted with the outside conditions under the mind of expert control, taking the proportion, integral and compensation part as the input to the single neuron simultaneity.
3.1 Control formula of PI of neuron of semi-active suspension system of tracked vehicle
The control formula of PI of the neuron of semi-active suspension system of tracked vehicle can be expressed as
![]() (8)
(8)
where K0 represents the non-linearity gain factor; KP represents the ratio gain factor; TI represents the integration time constant; e(t) represents the error. The transfer function can be expressed as
![]() (9)
(9)
Using the less sampling period T0, the relevant increment of Eq.(8) can be expressed as
![]() (10)
(10)
![]() (11)
(11)
where Δf=Δe(k){exp[K0・e(k)]-1/exp[K0・e(k)]}/2; Δe(k)= e(k)-e(k-1); KI=KP・T0/TI.
Fig.2 shows the structure of the non-linearity PI controller of semi-active suspension system of tracked vehicle actualized by using the single neuron. There are three neuron inputs xi(t) (i=1, 2, 3) in Fig.2. The input of the converter reflects the controlled process and the given bias status of the control. Supposing the given bias status as r(k), the output as y(k), the warp as e(k), it will be switched to the status needed via the converter as x1(k), x2(k), x3(k). And x1(k)=Δf, x2(k)=Δe(k), x3(k)=e(k), Wi is the weighted factor, then W1= K0, W2=KP, W3=KI.
Kmax is the max output gain and α is the adjustment factor of the nerve cell. Apparently, by choosing the appropriate weighted factor Wi (i=1, 2, 3) and adjustment factor α, it is possible to track the input signal of the system fully and restrain the external interference effectively. Obviously, x1, x2, x3 are the variables of no-linear compensation, error and error integral. At this time, the dynamical performance of the semi-active suspension system of tracked vehicle only depends on the error signal, and is little affected by the model parameter of the object or not at all. Then, the control formula of PI of the neuron of semi-active suspension system of tracked vehicle can be expressed as
![]() (12)
(12)
![]() (13)
(13)
where u(k) and umax represent the control input and the amplitude limiting of the control input.
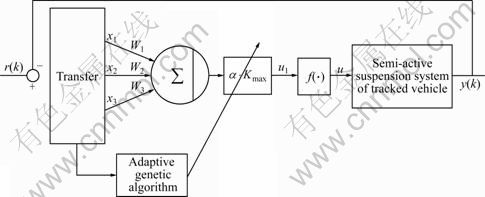
Fig.2 Control structure of single nerve cell
3.2 Optimization of controller parameters of neuron PI of semi-active suspension system of tracked vehicle
Since the dynamic and static performance of the controller system can be evaluated by the integrated time and absolute error (ITAE) synthetically (such as fast response time, short setting time, small overshoots and steady-state error), ITAE rule is available for the optimization of the controller parameters of neuron PI of semi-active suspension system of tracked vehicle. The formula after being discretizing can be expressed as
![]() (14)
(14)
Accordingly, the problem of the optimization of the controller parameters of neuron PI of semi-active suspension system of tracked vehicle can be come down to the calculation of W1, W2, W3 and α. The theory is effective when the following formula is given:
![]() (15)
(15)
s.t. a1≤W1≤b1
a2≤W2≤b2
a3≤W3≤b3
a4≤α≤b4
where m is decided by the size of the sampling period and t represents the step to be calculated.
An adaptive genetic algorithm is selected to optimize W1, W2, W3 and α. The key of the algorithm is to settle down the fitness function. The function is
 (16)
(16)
where ε represents a wee real number to play a role when the denominator is zero.
The initial crossover probability and initial mutation probability are decided by the following formulas:
![]() (17)
(17)
![]() (18)
(18)
where ![]() represents the fitness function of the bigger one of the two crossed individuals; f represents the corresponding size of the fitness function; favg represents the average fitness of the sample; fmax represents the max fitness of sample individual. The initial probability and mutation probability vary as the evolutionary algebra. Its law can be expressed as
represents the fitness function of the bigger one of the two crossed individuals; f represents the corresponding size of the fitness function; favg represents the average fitness of the sample; fmax represents the max fitness of sample individual. The initial probability and mutation probability vary as the evolutionary algebra. Its law can be expressed as
![]() (19)
(19)
![]() (20)
(20)
where t represents a genetic algebra; tmax represents a terminate algebra; λ represents a constant and 10 is selected as its value there.
3.3 Simulation research of neuron PI controller for semi-active suspension system of tracked vehicle
An intelligent composite control and numerical simulation on the suspension quality system of the tracked vehicle under a complex and random pavement was carried out. A group of typical parameters of the suspension quality system are selected according to the types of tracked vehicles: Mb=3.0×104 kg, Mw=160 kg, I=2×105 kg/m2, kb=2.4×106 N/m, kw=4.8×107 N/m, l1= -2.5 m, l2=-1.5 m, l3=-0.5 m, l4=0.5 m, l5=1.5 m, l6= 2.5 m, cb=3.0×104 (N・s)/m.
3.3.1 Excitation of complex and random pavement
A time domain model of elevation was created by employing a simple and convenient method of filtering white noise generating. Considering the single track as an input excitation from the road surface to the vehicle, the incentive force acting on the first wheel can be expressed as
![]() (21)
(21)
The incentive force acting on the rear wheel can be expressed as
![]() (i=2, 3, ?, 6)(22)
(i=2, 3, ?, 6)(22)
where zi(t) represents the incentive force acting on the i-th wheel; α represents a constant decided by the pavement grade; Δ=xi/v, xi represents the distance between the first driving-point to the point i; v represents the speed and ξ(t) represents the white noise. Its covariance can be expressed as
 (23)
(23)
where τ represents a time constant; β represents a constant decided by the pavement grade. For example, selecting the B-level for the simulation road surface, assigning constants for β, ρ and v as follows: β=0.13 m-1, ρ=0.003 2 m, v=15 m/s, the B-level road surface time domain simulation diagram is shown in Fig.3.
3.3.2 Simulation analysis of controller of neuron PI of semi-active suspension system of tracked vehicle
A control model of semi-active suspension system of tracked vehicle was built and under a simulation analysis in MATLAB/Simulink based on the theory analysis and mathematical model mentioned above. Let 0.005 s be the sampling time, 15 m/s be the speed during research, and the simulation result is shown in Figs.4-6.
It is indicated in the figures that the bodywork vertical amplitude, the bodywork vertical acceleration, and the pitch have been controlled effectively. The max value of the bodywork vertical amplitude is 0.016 m, the RMS value is 0.004 3 m under no control. After control, the max amplitude value turns to 0.012 m, and the RMS turns to 0.002 7 m, that is to say, the RMS of the vertical amplitude decreases by 37.2%, which is almost restricted to fluctuate within ±0.004. The max pitching angle value is 0.8? and the RMS is 0.31 °C under no control. After control, the max pitching angle value turns to 0.6?, and the RMS turns to 0.17?. That is to say, the RMS decreases by 45.2%, which is almost restricted to fluctuate within ±0.3. The RMS of bodywork vertical acceleration a is 1.5 m/s2 under no control. After control, the RMS turns to 0.92 m/s2. Compared with the condition of no control, the average acceleration controlled decreases by 38.6%.

Fig.3 B-level road surface time domain simulation diagram

Fig.4 Simulation curves of mass center displacement about tracked vehicle car body: (a) Mass center displacement; (b) RMS of mass center displacement
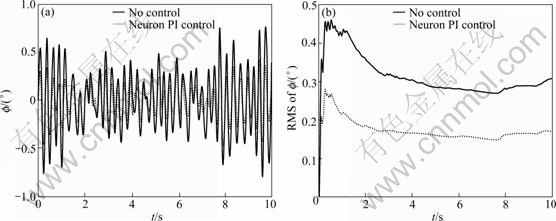
Fig.5 Simulation curves of pitch angle about tracked vehicle body: (a) Pitch angle; (b) RMS of pitch angle

Fig.6 Simulation curves of mass center vertical acceleration about tracked vehicle car body: (a) Vertical acceleration; (b) RMS of vertical acceleration
As the wave crest displayed in Figs.4-6, there is no hysteretic phenomenon on the control curves, which indicates that the neuron PI controller of semi-active suspension system of tracked vehicle has a good real-time characteristic. Under the random pavement excitation, the bodywork vertical amplitude, the bodywork vertical acceleration, and the pitch keep fluctuating within a low range, which indicates that the controller has a good robustness and a high regulating accuracy.
3.4 Control strategy application of neuron PI of semi- ctive suspension system of tracked vehicle
To test the efficiency of the control strategy of the neuron PI of semi-active suspension system of tracked vehicle, work cases of the seabed were simulated by using the single track as an input excitation as Eq.(21), and a contrast experiment was conducted to analyze their harshness in the walk process. One was a walking experiment about the fuzzy PID control strategy of semi-active suspension system of tracked vehicle model used to mine under the sea. The other is a closed cycle walking experiment about the neuron PI control strategy of semi-active suspension system of tracked vehicle model used to mine under the sea.
A comparison diagram about time domain response of vertical acceleration α of the tracked vehicle models under the two conditions mentioned above is displayed in Fig.7. It can be deducted from the diagram that the weighting vertical acceleration RMS under the control of the neuron PI has controller declined by 29.5%. To give a further illumination, Fig.8 displays the correlation curves about frequency response under the two conditions. It can be deduced from the figures that the resonance peak of power spectral density p of the body acceleration a under the control of the neuron PI has declined by 23.8%, in low frequency, indicating that the body vibration performance of tracked vehicle model used to mine under the sea has been improved clearly.

Fig.7 Comparison of automobile body vertical acceleration about semi-active suspension system of tracked vehicle model used to mine under sea

Fig.8 Comparison of power spectral density (p) of automobile body vertical acceleration about semi-active suspension system of tracked vehicle model used to mine under sea
4 Conclusions
1) A neuron PI controller was designed for semi-active suspension system of tracked vehicle model. An adaptive genetic algorithm was used to optimize the neuron PI controller parameters. The simulation results indicate that the bodywork vertical amplitude RMS has declined by 37.2%, which keeps fluctuating within ±0.004 m, the bodywork pitch RMS has declined by 45.2%, fluctuating within ±0.3, and the average vertical vibration acceleration of the body has declined by 38.6%.
2) Under the control of the non-linearity intelligent PI, the two experiments indicate that the weighting acceleration RMS along the vertical direction of the body has declined by 29.5%, and the resonance peak of power spectral density of the body acceleration has declined by 23.8%, which indicates the body vibration performance of tracked vehicle model used to mine under the sea has been improved clearly.
References
[1] LAUWERYS C, SWEVERS J, SAS P. Model free control design for a semi-active suspension of a passenger car [C]// Proceedings of ISMA, Leuven, 2004: 75-86.
[2] KIM J H, LEE C G, KIM G H. Study of machine design for a transformable shape single-tracked vehicle system original [J]. Mechanism and Machine Theory, 2010, 45(8): 1082-1095.
[3] RICCARDO M, ROBERTO Z. Control of port Hamiltonian systems by dissipative devices and its application to improve the semi-active suspension behavior [J]. Mechatronics, 2008, 18(7): 364-369.
[4] CHOI S B, LEE H K, CHANG E G. Field test results of a semi-active ER suspension system associated with skyhook controller [J]. Mechatronics, 2001, 11(3): 345-353.
[5] YAO G Z, YAP F F, CHEN G, LI W H, YEO S H. MR damper and its application for semi-active control of vehicle suspension system [J]. Mechatronics, 2002, 12(7): 963-973.
[6] TRAN D T, BRIEN J O, MURO T. An optimal method for the design of a robotic tracked vehicle to operate over fresh concrete under steering motion [J]. Journal of Terramechanics, 2002, 39(1): 1-22.
[7] RUBINSTEIN D, HITRON R. A detailed multi-body model for dynamic simulation of off-road tracked vehicles [J]. Journal of Terramechanics, 2004, 41(2/3): 163-173.
[8] LI Li-fu, SONG Jun. Vehicles based on preview of magnetorheological semi-active suspension control [J]. Functional Materials, 2006, 37(5): 796-798. (in Chinese)
[9] MARZBANRAD J, AHMADI G. Stochastic optimal preview control of a vehicle suspension [J]. Journal of Sound and Vibration, 2004, 275: 973-990. (in Chinese)
[10] YU Fan, GUO Kong-hui. Active suspension of their vehicle wheelbase preview control combined with Kalman filter [J] Automotive Engineering, 1999, 21 (2): 72-79. (in Chinese)
[11] LIU Shao-jun, LI Yan. Preview Control of Active Suspension Research based on 1/2 car model [J]. Information and Control, 2000, 29(1): 210-217. (in Chinese)
[12] JUN Zhuang-de, YU Fan. More vehicle active suspension with preview control algorithm [J]. China Mechanical Engineering, 2006, 17(12): 1316-1319. (in Chinese)
[13] E Jia-qiang. Intelligent fault diagnosis and its application [M]. Changsha: Hunan University Press, 2006: 123-135. (in Chinese)
[14] E Jia-qiang, WANG Chun-hua, WANG Yao-nan, GONG Jin-ke. A new adaptive mutative scale chaos optimization algorithm and its application [J]. Journal of Control Technology & Applications, 2008, 6(2): 141-145.
[15] XIONG Chao, ZHENG Jian, ZHANG Jin-iu. Tracked vehicle suspension system modeling and simulation J]. Weapons and Equipment Automation, 2005, 24(1): 9-11. (in Chinese)
[16] ZHAO Heng, LU Shi-fu. Road to face four-wheeled vehicles enter the time-domain model [J]. Automotive Engineering, 1999, 21(2): 112-117. (in Chinese)
[17] TAN Yong-hua, CHEN Ying, LU Yong-xiang. Establishment of the time-domain model of vehicle incentives and computer simulation with road surface [J]. China Journal of Highway 1998, 11(3): 96-102. (in Chinese)
Foundation item: Project(2010GK3091) supported by Industrial Support Project in Science and Technology of Hunan Province, China; Project(10B058) supported by Excellent Youth Foundation Subsidized Project of Hunan Provincial Education Department, China
Received date: 2010-11-22; Accepted date: 2010-12-27
Corresponding author: ZENG Yi-hui, Associate Professor; Tel: +86-731-88118922; E-mail: 774158154@qq.com

