DOI: 10.11817/j.issn.1672-7207.2019.01.009
���ڲ��������ij��ص��ܼ������������о�
����1, 2��ţ����1, 3�������1��������1
(1. ɽ����ѧ ��е����ѧԺ��ɽ�� ���ϣ�250061��
2. ���ִ�ѧ ������������ƹ����ص�ʵ���ң����� ������130025��
3. ɽ����ѧ ��Ч�ྻ��е����������ص�ʵ���ң�ɽ�� ���ϣ�250061)
ժҪ��λ�ھȻ������ص����ϵ��������壬���������·��Ķ�ά������Ϊ�˶Զ�ά���и��룬�Ľ�һ��4-PUU����������Ϊ���ص��ܵ����壬�����ƶ�������װ��������������������Ƶ�����ϵͳ�Ķ���ѧ��״̬�ռ䷽�̡��������������Ŀɿ���������LQR���������Hrovat�������㷨�õ����о�����ϵͳ�����·�����������������Ƽ��������ܡ��о�����������õ���ϵͳ�ܹ���Ч�������������ƽ�����Լ���x�����ת�����ô����������������������Ƶ���ϵͳ�ĸ��������������ڱ������Ƶĸ������ܣ����ܹ�ȡ�������������ƽӽ��ļ���Ч����
�ؼ��ʣ��Ȼ������ܣ�����������������������������������
��ͼ����ţ�TH113��TB53 ���ױ�־�룺A ���±�ţ�1672-7207(2019)01-0059-08
Ambulance stretcher based on parallel mechanism and vibration semi-active control
GAO Xiang1, 2, NIU Junchuan1, 3, SHEN Guodong1, TIAN Lili1
(1. School of Mechanical Engineering, Shandong University, Jinan 250061, China;
2. State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130025, China;
3. Key Laboratory of High-efficiency and Clean Mechanical Manufacture of Ministry of Education, Shandong University, Jinan 250061, China)
Abstract: The supine patients on ambulance stretcher experienced multi-dimensional excitations from the road. In order to isolate the multi-dimensional vibration effectively, an improved 4-PUU parallel mechanism was proposed as the main structure of the stretcher. Springs and magneto-rheological dampers were installed at the prismatic pairs. Dynamic and state-space equations of the vibration isolation system were deduced. The controllable damping force was obtained by combining LQR with Hrovat semi-active algorithm. The semi-active control and vibration isolation capability were addressed with stochastic road profile excitation. The results show that the stretcher system is able to reduce the translational vibrations along the axes and the rotational vibration around the x-axis validly. The vibration isolation capability of semi-active control stretcher system composed of MR dampers is significantly better than passive control system, and it can achieve almost the same vibration isolation performance as active control system.
Key words: ambulance stretcher; parallel mechanism; magneto-rheological damper; semi-active control
Ŀǰ���ҹ��Ȼ�������ɻ������̻���ԽҰ������ֱ�Ӹ�װ���ɣ��������ܾ�Ϊ�������ܣ����ܸ���·��״������ʵʱ���������������ܼ���������������Ƴɱ��ϸߣ����ҹ���δ�õ��㷺Ӧ��[1]����ˣ��Գ��ص��ܽ���������Ż�����һ�ֽ�������������������Ч�ķ�ʽ��ͨ������ϵͳ�Ƿ�����������ɽ����Ƽ�����Ϊ�����������������ơ��������ƵĶ�̬���Բ���ʵʱ���ڣ�����������������ʵʱ�ṩ�������������Ч���������ڱ������ƣ�����������������ɱ��ߡ��ܺĴ�ʧ�粻������������ȱ�㡣���������Ƽ�������˱����������������Ƶ��ŵ㣬ͨ����ѧ�������ڿɱ�նȻ�ɱ�����Ԫ������ѧ���ԣ�ʵ�����ơ���ϵͳʧ�磬���˻�Ϊ��������ϵͳ����ʱ�Կ�ʵ������ϵͳ�������õ�³�����뾭����[2]�����оȻ������ص��ܴ��Ϊ����֧�ţ�����ڳ����뵣�����Ӵ��������������ɱ�������ϵͳ���������ܽϲ�����ᵼ�²�Ա��ת��;���ܵ������˺�����ˣ��б�Ҫ�Ե��ܽ��ж��θ�����ƣ�����߲�Ա�ij���������[3]���Դˣ�������ѧ��չ���������о��������[4]�������˹�����Ӧ���ڼ��ȳ����ܻ���װ���ϣ�����ģ��PID����Ӧ���Ʒ�������Ч�����˴������Ǽ��ٶȡ��ڵ¸���[5]�����˼ľȻ�������-��λ�����ά�����ɶ���ѧģ�ͣ������ģ�����������Գ��ص��ܽ��������������ƣ��Ӷ��ܿ���������Ƶ�Σ�ȡ���˽Ϻõĸ���Ч��������[6]�����˿������ɵ��ܵ���ѧģ�Ͳ������˲�ͬ·��������о���ZHAO��[7]�����һ��3-PUU��������������ܹ�����������Ķ�ά������Ч���룬������������������Ķ�ά��CHAE��[8]�Դ�����������Ϊ���ص��ܼ������������ͨ����ģ��ṹ�����㷨ʵ�������������ơ�BRUZZONE��[9]�����һ�־���3T2R���Ե�5���ɶȲ���������Ϊ���ص��ܵ�����ṹ����δ����������ܽ�������̽�֡������о�������ļ��ܴ����Դ�������������и��룬��δ����ˮƽ�����������������Ӱ�졣��ISO2631����֪�����������ˮƽ������������Ƶ�ηֱ�Ϊ1~2 Hz��8~12 Hz���Ȼ�����·������ʻ����ͣ��ת��Ȳ��������У���ʹ����ϵͳ����ǰ�����ҡ������Լ�������[10]��Ϊ�˶Ե���ϵͳ�Ķ�ά������Ч�����ܡ��ɿ����ƣ��������߸Ľ�һ��4-PUU����������Ϊ���ص��ܵ����壬�ڲ��������ƶ�������װ��������������������Ƶ�����ѧ��״̬�ռ䷽�̣��о����������Ƽ���������ܡ�
1 �����˶�ѧ
1.1 ����ģ��
4-PUU����������ͼ��ͼ1��ʾ���û�����Ϊ���ܵ����壬��4��֧��������ͬ���˶���������ʽ���Զ�ƽ̨����ƽ̨���ֱ����ƶ��������˸������˸���˳�ɡ�ÿ��֧���е�2�����˸�����ת�����߾�λ��xyƽ�棬����һ��������x��ã�����һ������ƫ��y����в��á������������˻�����y��z�����ת�˶�����ƽ̨�뵣��ƽ����������ƽ̨�복��ذ���������Ai��Bi֮����ƶ���������4�鵯�ɡ������������������������˺��д������������Ķ�ά����ϵͳ��
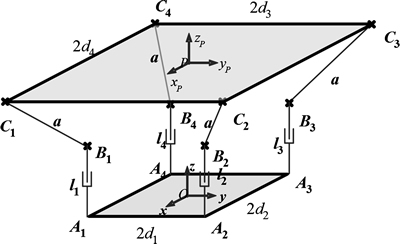
ͼ1 4-PUU����������ͼ
Fig. 1 Schematic of 4-PUU parallel mechanism
����������G-K��ʽ[11]�����Եõ�4-PUU�������������ɶ�Ϊ4���������������ƽ���˶��Լ���x�����ת�˶���
1.2 �˶�ѧ����
Ϊ̽�ֵ��ܵĸ������ܣ�����Ҫ��������˶�ѧ��������ƽ̨Ϊ�߳�2d3��2d4�ľ��Σ�PΪ������ϵ��ԭ�㡣��ƽ̨Ϊ�߳�2d1��2d2�ľ��Σ�OΪ������ϵ��ԭ�㡣�ڶ�ƽ̨�Ͷ�ƽ̨�ֱ���������ϵO-xyz�Ͷ�����ϵP-xPyPzP������ =a���ƶ�������
=a���ƶ������� =li (i=1, 2, 3, 4)����x��ת��Ϊ�ȡ�����λ�ˣ���Bi��Ci�ڶ�����ϵP-xPyPzP�;�����ϵO-xyz�е�����ֱ�ΪBPi��CPi�Լ�BOi��COi�����Ci�ɱ�ʾΪ
=li (i=1, 2, 3, 4)����x��ת��Ϊ�ȡ�����λ�ˣ���Bi��Ci�ڶ�����ϵP-xPyPzP�;�����ϵO-xyz�е�����ֱ�ΪBPi��CPi�Լ�BOi��COi�����Ci�ɱ�ʾΪ
 (1)
(1)
ʽ�У� ��mΪO��P��
��mΪO��P�� Ϊ��x�����ת�任����
Ϊ��x�����ת�任����
 (2)
(2)
�ڶ�����ϵO-xyz�У����ü��ι�ϵ���Եõ�
 (3)
(3)
Ϊ��֤��ƽ̨��ͼ1��ʾ���ã��ɵû�����λ�÷���Ϊ
 (4)
(4)
ʽ�У�
 (5)
(5)
���� ���ʻ������ſ˱������
���ʻ������ſ˱������ �ɱ�ʾΪ
�ɱ�ʾΪ
 (6)
(6)
2 ����ѧ����
2.1 ��������������ѧģ��
������������Ϊ�ɱ�����Ԫ����������ӦѸ�١��ܺĵ͡�ʧ������ȶ��������ŵ㣬����ѡ�ô�������������Ϊ���ص���ϵͳ��������������ѧģ�Ϳɷ�Ϊ����ģ����Dz���ģ�������ࡣ���õIJ���ģ����Binghamģ�͡�Bouc-Wenģ�ͺ�Herschel-Bulkleyģ�͵ȣ��Dz���ģ����ָ���ö���ʽ��������Դ���������������-�ٶȹ�ϵ������϶��õ���ģ��[12-13]��Ϊ����ʵ����ʵʱ���ƣ��ڴ�ѡ��Binghamģ�ͱ�������������������ѧ��Ϊ��Binghamģ�͵Ķ���ѧ����[14]�ɱ�ʾΪ
 (7)
(7)
ʽ�У�FeΪ����������������������ceΪ���������������������ϵ���� Ϊ�������������������˶��ٶȣ�FMRΪ�������������Ŀɿ���������HΪ�ų�ǿ�ȣ�IΪ���Ƶ�����������������弰ȡֵ����1��
Ϊ�������������������˶��ٶȣ�FMRΪ�������������Ŀɿ���������HΪ�ų�ǿ�ȣ�IΪ���Ƶ�����������������弰ȡֵ����1��
��1 ����������������ȡֵ
Table 1 Parameters of MR damper
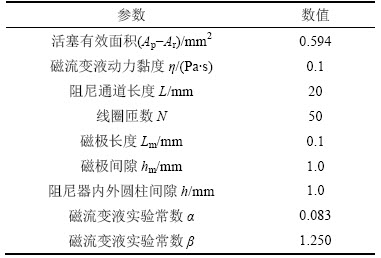
��������ı仯��ΧΪ0~2A���ɵõ����������������������ϵ��ceΪ281.1 N��s/m���ṩ�Ŀɿ���������Χ0~294.78 N��
2.2 ����ѧ���̽���
���ڲ�������������ϣ��䶯��ѧ���̱���Ϊǿ�ҵķ����ԣ���⸴�ӣ�Ӧ���䶯��ѧ���̵Ľ����������ʵ������ؼ����ǵ�����ϵͳ�������������£����ԣ��ڹ�������ѧ����ʱ�ɺ��Զ�ƽ̨���������ܡ�����������������ڶ�ƽ̨������С����ˣ���������������ѡȡ��ƽ̨λ��Ϊϵͳ�Ĺ������꣬���������ɢϵ����Lagrange���̿ɱ�ʾΪ
 (8)
(8)
ʽ�У�TEΪϵͳ���ܣ�UEΪϵͳ���ܣ�DEΪϵͳ�����ɢ�ܣ�XΪϵͳ�Ĺ������������� Ϊϵͳ������������
Ϊϵͳ������������
������������������������ȣ������Ľṹ�����С���ڴ˺��Խṹ���ᣬ�����Ǵ����������������ᡣ����ϵͳ�Ķ��ܡ������Լ������ɢ�ܿɷֱ��ʾΪ
 (9)
(9)
ʽ�У� ��MΪ��ƽ̨�Ĺ�������
��MΪ��ƽ̨�Ĺ������� ��mpΪ��ƽ̨������IxΪ��x���ת��������KΪ�նȾ���
��mpΪ��ƽ̨������IxΪ��x���ת��������KΪ�նȾ��� ��kΪ���ɸնȣ�CΪ�������
��kΪ���ɸնȣ�CΪ������� ��GΪ���������ſ˱Ⱦ���
��GΪ���������ſ˱Ⱦ��� ��
��
��ʽ(9)����ʽ(8)�������ɵõ���ϵͳ�Ķ���ѧ����Ϊ
 (10)
(10)
3 ���Ʋ���
��������������Ϊ���ܵ����������������������ͨ�������ɲ�ͬ���Ʒ����õ����������������õ������ڰ��������Ʋ����ṩ���ⷽ�����������Ҫ�����Ӧ�İ������㷨�������������������LQR����������ָ������ΪĿ�ģ�ͬʱ���ϵͳ��Ӧ������������ì�ܵ����������ſ��ƽ��дΪͳһ�Ľ�������ʽ������ʵ�ֱջ����ơ��ڴˣ����Ȳ���LQR�����õ�������������ٽ����Hrovat�������㷨[15]�õ���������������ʵ�ʿ���������Hrovat�������㷨�ɱ�ʾΪ
 (11)
(11)
ʽ�У�FMRmaxΪ���������������ɿ���������FMRminΪ��������������С�ɿ���������uiΪ�����������i=1,2,3,4��
ѡȡ��ƽ̨�����λ��Ϊ״̬�������� ����ʽ(10)��д��״̬�ռ����ʽ��
����ʽ(10)��д��״̬�ռ����ʽ��
 (12)
(12)
ʽ�У� ��Ϊ���ſ�����������
��Ϊ���ſ����������� Ϊ���·����ٶȼ�����A��Ba��BΪϵ������
Ϊ���·����ٶȼ�����A��Ba��BΪϵ������
 (13)
(13)
 ,
,  (14)
(14)
���Զ�������������ָ�귺�� �ɱ�ʾΪ
�ɱ�ʾΪ
 (15)
(15)
ʽ�У� Ϊ����������
���������� ��������
�������� ��
�� �ͦ�RΪȨϵ�����������������ṩ������������ɱ�ʾΪ
�ͦ�RΪȨϵ�����������������ṩ������������ɱ�ʾΪ
 (16)
(16)
ʽ�У� ��
�� Ϊ����Riccati���̵������⣬
Ϊ����Riccati���̵������⣬
 (17)
(17)
���ʽ(12)��ʽ(16)���� ��ȡ����Ҷ�任���ɵõ��������������ṩ���������ʱ��ƽ̨���λ�Ƶ�Ƶ��⣬��
��ȡ����Ҷ�任���ɵõ��������������ṩ���������ʱ��ƽ̨���λ�Ƶ�Ƶ��⣬��
 (18)
(18)
ʽ�У� Ϊ·�漤����Ƶ����ʽ��
Ϊ·�漤����Ƶ����ʽ�� ��
��
��������������������ٶȷ���������������������ɿ�������ʱ����ʱ�������������ṩ���ɿ�����������״̬���̿ɱ�ʾΪ
 (19)
(19)
��ʽ(19)ȡ���ϱ任����ʱ����ƽ̨���λ�Ƶ�Ƶ���ɱ�ʾΪ

 (20)
(20)
ʽ(12)�У��� �����˻�Ϊ���������״̬�ռ䷽�̣���
�����˻�Ϊ���������״̬�ռ䷽�̣���
 (21)
(21)
��ʽ(21)ȡ����Ҷ�任�����Եõ����������¶�ƽ̨���λ�Ƶ�Ƶ��⣺
 (22)
(22)
������Hrovat�������㷨����ijһƵ�ʴ�����ƽ̨λ�Ƶ�Ƶ���Ϊʽ(18)��(20)��(22)����֮һ��������ʽΪ�㣬�����������ƶ�ƽ̨λ�Ƶ�Ƶ���ɱ�ʾΪ
 (23)
(23)
4 �������
λ�ڳ��ص����ϵ�����������ܵ�·�治ƽ�Ȳ��������������Ӱ�죬�ڴˣ�����Ȼ�����ʻ��B��·�档���·���ɱ�ʾΪ[16]
 (24)
(24)
ʽ�У� Ϊ���ֵ��˹��������
Ϊ���ֵ��˹�������� Ϊ·������̣߳�����������弰ȡֵ����2��
Ϊ·������̣߳�����������弰ȡֵ����2��
��ʽ(24)����Ҷ�任���ɵ����ֵ�������źŵĹ������ܶ�(PSD)ΪSw(��)���ڴˣ���Sw(��)=1������Ӧ�Ĺ������ܶȿɱ�ʾΪ
 (25)
(25)
ʽ�У� Ϊϵͳ��Ƶ�캯����i=x, y, z, �ȣ�j=x, y, z, �ȡ�
Ϊϵͳ��Ƶ�캯����i=x, y, z, �ȣ�j=x, y, z, �ȡ�
�ڷ�������У�ʽ(15)��Ȩϵ���ֱ�ȡ

 ��
�� 5��10-3������ϵͳ��·������Ҫ�������2��ʾ��
5��10-3������ϵͳ��·������Ҫ�������2��ʾ��
��2 ��������
Table 2 Parameters in simulation
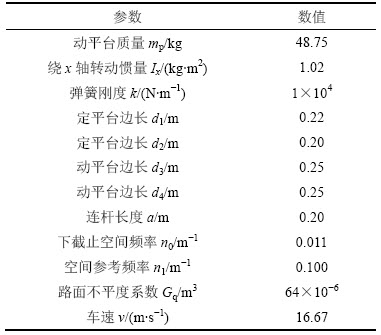
ͨ����2�е����ݣ����Լ��������ϵͳ��y��x��z���Լ���x���4������Ƶ�ʷֱ�Ϊfn1=0.015 Hz�� fn2=1.20 Hz��fn3=4.58 Hz��fn4=7.84 Hz��������[17]��֪�����������1~12 Hz�ļ�����Ϊ���У���������ǻ����ǻ���ò��������ĵ�2~4��Ƶǡ��λ���������������Ƶ�Ρ����ڱ����������Ե�Ƶ�Ŀ���Ч���ϲ��ˣ����ð��������Ƽ���������Ƶ�ε����Ը��룬����߲�Ա�������ԡ�Ϊ�˶ԱȰ��������Ƶ�Ч����ͬʱ�������������ơ����������������ı��������Լ����������������ϵ��ce=0ʱ�Ĺ������ܶȡ�
4-PUU�����������������������ƽ���Լ���x��ת��4�����ɶȣ�����ϵͳ���Զ����������ƽ�����Լ���x��ĸ���������Ч���롣���ȶ��嶨ƽ̨�ܵ��������·����������ʱ���Ƶ���о�����ϵͳ�ĸ���������
ͼ2��ͼ3��ʾ�ֱ�Ϊ��z��Զ�ƽ̨���м���ʱ��ƽ̨z����ٶ�ʱ�̺����ס��ɼ�����ʱ���У�����������Ч����ã��ٶ����㸽��С���Ȳ��������������Ƶĸ����������Ժ��ڱ������ƣ��ӽ��������ƣ�ֻ���ڸ���ʱ����С��ֵ���������ڴ����������������ԣ���������������������������֮���л���Ƶ���У���������������������Ч���ӽ�����4���������зdz��õ��������á������������z�ἤ��ʱz����ٶ�ʱ����z�������ܶȣ��������ٶ�ʱ���빦�����ܶȿɰ���ͬ�����õ�����������������Ծ������ƽ��ۡ�
���ǵ��Ȼ���ʵ����ʻ״���������������ܲ�ͬ����Ķ�ά�������ڴ˶��嵣��ϵͳ�ܵ��ظ��������Լ���x��ĸ��ϼ������о�����ϵͳ�ڸ��ϼ����µ��������ܶȡ�
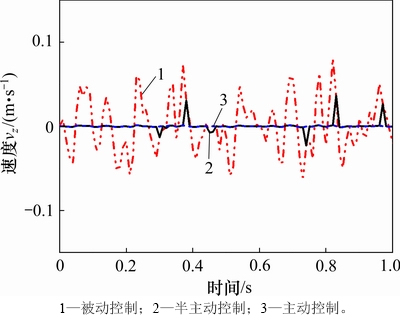
ͼ2 ��z�ἤ��z������ٶȵ�ʱ��
Fig. 2 Output velocity in z direction with excitation in z axis
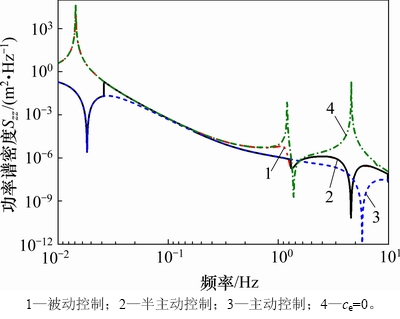
ͼ3 ��z�ἤ��z������Ĺ�����
Fig. 3 PSD in z direction with excitation in z axis
ͼ4~7��ʾ�ֱ�Ϊ��ƽ̨�ܸ��ϼ���ʱ��ƽ̨��x��y��z�᷽���Լ���x�᷽��Ĺ����ס���ͼ4~7�ɼ���1) ���������������ϵ��ce=0ʱ����ʱ���ܵĹ������ȫ��������ǡ��������Ľ�Ƶ���Ӧ������������ϵͳ�п��Ǵ������������ʱ������һ����ģ̬֮��λ��������������Ƶ�εĹ����õ������ƣ�2) ���������������������ƣ���4��������кܺõ��������ã��뱻��������Ƚϣ�PSDֵ�����½���Ӧ�ô������������İ���������ϵͳ��ȡ�������������ƽӽ��ļ���Ч����3) ���ڴ���������������ʵʱ�ṩ�������������ɿ�������������Hrovat�������㷨���������������ܶ������ڱ�������������֮���л���
ͼ8��ʾΪ���ϼ����´������������ṩ�Ŀɿ�����������ͼ8�ɼ����ɿ�������ʵʱ�仯����仯��Χ���ڡ�75 N֮�䣬��δ�������ɿ���������
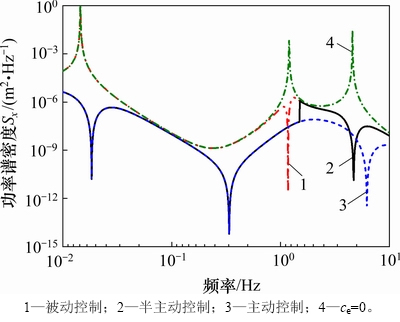
ͼ4 ���ϼ�������x��Ĺ�����
Fig. 4 PSD in x direction with compound excitations
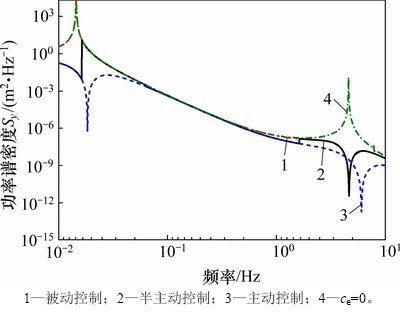
ͼ5 ���ϼ�������y��Ĺ�����
Fig. 5 PSD in y direction with compound excitations
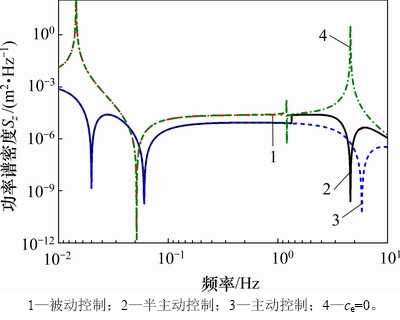
ͼ6 ���ϼ�������z��Ĺ�����
Fig. 6 PSD in z direction with compound excitations
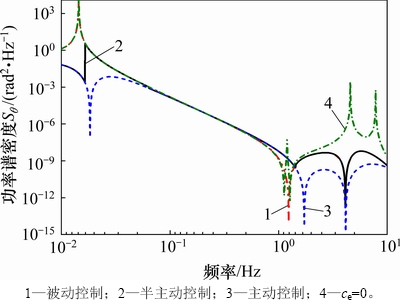
ͼ7 ���ϼ�������x��Ĺ�����
Fig. 7 PSD around x direction with compound excitations
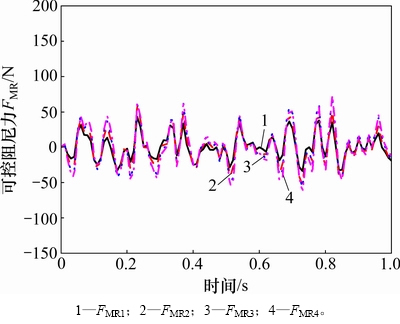
ͼ8 �������������ṩ�Ŀɿ�������
Fig. 8 Controllable damping force of MR damper
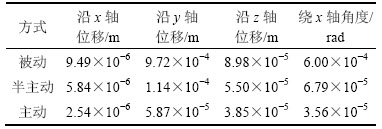
Ϊ�˶ԱȲ�ͬ������ʽ�ĸ���Ч�����ڴ˲��þ�����(RMS)��Ϊ��������ָ�꣬��ͬ����ʽ��RMS����3���ӱ�3��֪���뱻��������ȣ���������������x��y��z�᷽���Լ���x�᷽���λ�ƾ�����ֵ�ֱ��½���38.46%��88.27%��38.75%��88.68%�����������Ƶľ�������4�������Ͼ�����С�ڱ������Ƶľ��������������������Ƶľ������Դ���������ڴ�������������������������һ����Ч�����ά�ķ�ʽ���ر����ڵ��ܵ������Լ���������ȡ���˷dz������ĸ���Ч����
��3 ��ͬ����ʽ��RMS
Table 3 RMS of different vibration isolation performances
5 ����
1) �Ľ���һ��4-PUU����������Ϊ���ص��ܵ����壬���ƶ�������װ������������������������˺��д������������İ��������Ƶ���ϵͳ���Ƶ��˸���ϵͳ�Ķ���ѧ��״̬�ռ䷽�̡�����LQR�����Hrovat�������㷨�õ��������������Ŀɿ����������õ���ϵͳ�ܹ��������������ƽ�����Լ���x�����ת������Ч���롣��������������������ɱ��ߣ��ܺĴ��ô����������������������Ƽ����������õĿɿ����뾭���ԡ�
2) ���ô����������������������Ƶ���ϵͳ���ܹ�ȡ������������ϵͳ�ӽ��ĸ���Ч�������������뱻���������������д���Ƚ��͡��ø���ƽ̨������������죬���������ڳ��ص��ܣ����ҿ�Ӧ���ھ�����ƽ��һת����ʽ�Ķ�ά���룬Ϊ��ά�����豸����ṩ��һ�ֲο���
�ο����ף�
[1] �, Ф����, �����. �Ȼ���ת�˵��ܶ���λ���������Է���[J]. ũҵװ���복������, 2016, 54(9): 19-22.
LI Jun, XIAO Yayun, WU Keshao. Simulation and analysis of lying position comfort of ambulance transfer stretcher[J]. Agriculture Equipment & Vehicle Engineering, 2016, 54(9): 19-22.
[2] ���. �����о���չ����[J]. ��ѧ����, 2015, 36(4): 547-565.
XU Jian. Advances of research on vibration control[J]. Chinese Quarterly of Mechanics, 2015, 36(4): 547-565.
[3] ����, ����ϲ, ����. ij�ͼ��ȳ�����̨�������Է���������Ż�����о�[J]. ������, 2008, 27(8): 77-80.
WANG Meng, XU Xinxi, REN Xudong. Simulation analysis and optimization design for vibration isolation characteristics of stretchers on ambulance[J]. Journal of Vibration and Shock, 2008, 27(8): 77-80.
[4] ����, ����, �����, ��. ���ȳ��ص����˹��������ϵͳ���Է���[J]. ����������, 2014, 34(3): 119-123.
GAO Peng, SUN Dagang, LIANG Peigen, et al. Characteristics analysis of pneumatic artificial muscle isolation systems on ambulance vehicle mounted stretchers[J]. Noise and Vibration Control, 2014, 34(3): 119-123.
[5] �ڵ¸�, ������, ��³�, ��. �Ȼ�������-��λ����ϵͳ�����������о�[J]. �ൺ��ѧѧ��(���̼�����), 2011, 26(2): 89-93.
YU Defu, FU Chaoxing, YANG Dechao, et al. Study on vibration active control of ambulance stretcher and supine patient system[J]. Journal of Qingdao University(Engineering & Technology Edition), 2011, 26(2): 89-93.
[6] ����, �ε¹�, ����, ��. ���������ڳ��ص��ܸ���ϵͳ�е�Ӧ��[J]. ҽ������װ��, 2009, 30(10): 20-22.
REN Xudong, DUAN Deguang, GAO Zhenhai, et al. Application study of air spring for vehicle stretcher vibration isolation system[J]. Medical Equipment, 2009, 30(10): 20-22.
[7] ZHAO Wei, LI Bing, LIU Ping, et al. Semi-active control for a multi-dimensional vibration isolator with parallel mechanism[J]. Journal of Vibration and Control, 2012, 19(6): 879-888.
[8] CHAE H D, CHOI S B. A new vibration isolation bed stage with magnetorheological dampers for ambulance vehicles[J]. Smart Materials and Structures, 2015, 24: 1-14.
[9] BRUZZONE L, MOLFINO R M. Special-purpose parallel robot for active suspension of ambulance stretchers[J]. International Journal of Robotics and Automation, 2003, 18(3): 121-130.
[10] ţ����, ���, ����. ���ڱ�����������Ķ�ά�����о�[J]. ������, 2014, 33(7): 206-209.
NIU Junchuan, YANG Feng, LI Yong. Multi-dimensional vibration isolation based on metamorphic parallel mechanism[J]. Journal of Vibration and Shock, 2014, 33(7): 206-209.
[11] ����, ������, �½�, ��. һ������4-PUU���������˶�ѧ����[J]. ��ɽ��ѧѧ��, 2007, 31(5): 387-391.
QI Xiaoyuan, LI Ningning, CHEN Jiang, et al. Kinematic analysis of a new style 4-PUU parallel mechanism[J]. Journal of Yanshan University, 2007, 31(5): 387-391.
[12] ��־��, ����, �Ʋ�ϼ, ��. ���в�����ȷ���Եij�����������H�������������������[J]. ������, 2013, 32(14): 93-97.
ZHANG Zhiyong, LIU Xin, HUANG Caixia, et al. H�� output feedback semi-active control for a vehicle seat suspension with parametric uncertainty[J]. Journal of Vibration and Shock, 2013, 32(14): 93-97.
[13] ������, �Ĺ���, ������. ������������³�������ܿ��Ʒ����о�[J]. ��������, 2014, 36(2): 216-221.
LONG Yaokun, WEN Guilin, CHEN Zhewu. A simulation study on robust guaranteed cost control for vehicle active suspension[J]. Automotive Engineering, 2014, 36(2): 216-221.
[14] CHOI S B, LEE H S, PARK Y P. H�� control performance of a full-vehicle suspension featuring magnetorheological dampers[J]. International Journal of Vehicle Mechanics and Mobility, 2002, 38(5): 341-360.
[15] ŷ��Ƽ. �ṹ����: ����, �����������ܿ���[M]. ����: ��ѧ������, 2003: 131-140.
OU Jinping. Structure vibration control: active, semi-active and intelligent control[M]. Beijing: Science Press, 2003: 131-140.
[16] �½�ƽ, ����η, ף��, ��. ����Matlab/Simulink�����·�潨ģ�벻ƽ�ȷ���[J]. ũҵ��еѧ��, 2010, 41(3): 11-15.
CHEN Jieping, CHEN Wuwei, ZHU Hui, et al. Modeling and simulation on stochastic road surface irregularity based on Matlab/Simulink[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(3): 11-15.
[17] PADDAN G S, GRIFFIN M J. Evaluation of whole-body vibration in vehicles[J]. Journal of Sound and Vibration, 2002, 253(1): 195-213.
(�༭ ����ƽ)
�ո����ڣ�2018-03-01�������ڣ�2018-06-05
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51275275��51675306)��������������ƹ����ص�ʵ���ҿ��Ż���������Ŀ(20161112) (Projects(51275275, 51675306) supported by the National Natural Science Foundation of China; Project(20161112) supported by Foundation of State Key Laboratory of Automotive Simulation and Control)
ͨ�����ߣ�ţ��������ʿ�����ڣ����»�еϵͳ����ѧ���������������о���E-mail: niujc@sdu.edu.cn

