基于Lyapunov理论的海底采矿车点镇定控制
李力1, 2,张正1,陈铭2,潘珏承1
(1. 中南大学 机电工程学院,湖南 长沙,410083;
2. 深海矿产资源开发利用技术国家重点实验室,湖南 长沙,410012)
摘要:以我国海底采矿车为研究对象,针对其非完整性和非线性的特点,基于Lyapunov理论,提出海底采矿车点镇定控制系统的控制律,证明在此控制律作用下海底采矿车位姿误差是收敛的;设计基于Lyapunov理论的点镇定控制器,采用ADAMS/ATV履带车模块和MATLAB/simulink软件,建立海底采矿车的多刚体动力学模型和基于Lyapunov理论的点镇定控制模型及二者的协同仿真模型,对海底采矿车的点镇定控制仿真进行研究。研究结果表明:海底采矿车在基于Lyapunov理论所设计的点镇定控制器作用下,能快速而平稳地镇定到目标位置和姿态,所提出的控制律和所设计的控制器对于海底采矿车行走控制是有效的。
关键词:海底采矿车;点镇定;Lyapunov理论;协同仿真
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2014)08-2624-05
Point stabilization of seabed mining vehicle based on Lyapunov theory
LI Li1, 2, ZHANG Zheng1, CHEN Ming2, PAN Juecheng1
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2.State Key Laboratory of Deep Sea Mineral Resources Development and Utilization Technology, Changsha 410012, China)
Abstract: According to the underactuated and nonlinear characteristics of the seabed mining vehicle in China, the kind of control law based on the Lyapunov theory in the point stabilization controlling system was put forward. And it was proved that the position and direction error of seabed mining vehicle was converged during the action of this control law. The point stabilization controller was designed. Using ADAMS/ATV module and MATLAB/simulink software, the co-simulation model based on multi-rigid-body dynamics model and point stabilization control model of seabed mining vehicle was established. And the point stabilization control co-simulation of seabed mining vehicle was carried out. The results show that the seabed mining vehicle can move rapidly and steadily to the target position and direction during the action of the controller based on Lyapunov theory, and the proposed control law and the designed controller are effective for moving control of the seabed mining vehicle.
Key words: seabed mining vehicle; point stabilization; Lyapunov theory; co-simulation
海底采矿车作为海洋矿产资源开采系统的重要组成部分,其行走可控性直接影响整个采矿系统的工作效率[1]。由于富存于数千米海底的海洋矿产资源(如多金属结核、富钴结壳和多金属硫化物等)的产出丰度不同,在采矿过程中,不同丰度区域的采矿需要采用不同的采矿路径规划,采矿车需要在不同的规划路径之间转换行走,要求采矿车从规划路径的末点平稳、快速地移动至另一规划路径起点,且保持在指定的方向上。此类行走控制问题属于点镇定问题。海底采矿车采用履带式行走方式,其行走由2条履带差动驱动,属于非线性复杂系统[2],同时,其没有侧移的特性决定了它是一个非完整系统。因此,海底采矿车的镇定控制更加困难。对于海底采矿车这类非完整约束下的运动控制,Brockett[3]证明了不存在连续的时不变反馈控制律将其位姿(位置和姿态)稳定到原点。为此,人们提出了连续时变反馈控制律[4]、非连续反馈控制律[5]和综合两者的混合控制律[6]这3类针对非完整系统的镇定控制律。在此,本文作者以我国海底采矿车比例为1:20的模型车为研究对象,对采矿车在点镇定过程中的位姿误差进行适当转换,从而提出一种基于Lyapunov直接法的连续时变控制律,并对在该控制律控制作用下的误差收敛情况进行证明。同时,以此为基础,设计一种点镇定控制器,利用MATLAB/simulink和ADAMS/ATV平台,建立海底采矿车模型车的机械与控制协同仿真模型,对海底采矿车模型车的点镇定协同仿真进行研究。
1 点镇定控制理论基础
图1所示为海底采矿车位姿误差示意图[7]。在笛卡尔坐标系XIOYI中,设采矿车的当前位姿为 ,
, ;任意给定的目标点位姿为
;任意给定的目标点位姿为 ,
, 为确定的常数向量。其中,x,y和θ分别为采矿车当前位姿的XI坐标、YI坐标和方向角;xr,yr和θr分别为采矿车目标位姿的XI坐标、YI坐标和方向角。则采矿车当前位姿与点镇定目标位姿的误差为
为确定的常数向量。其中,x,y和θ分别为采矿车当前位姿的XI坐标、YI坐标和方向角;xr,yr和θr分别为采矿车目标位姿的XI坐标、YI坐标和方向角。则采矿车当前位姿与点镇定目标位姿的误差为
 (1)
(1)
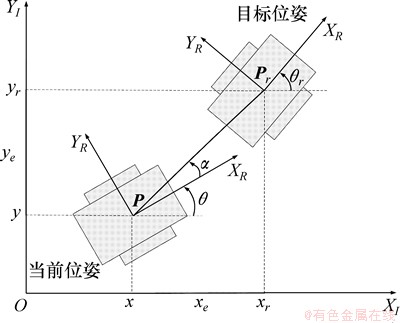
图1 海底采矿车位姿误差示意图
Fig. 1 Position and direction error schematic diagram of seabed mining vehicle
其中:xe,ye和θe分别表示在笛卡尔坐标系中采矿车当前位姿与目标位姿在XI方向、YI方向和方向角上的误差。参照式(1),将采矿车在笛卡尔坐标下的位姿误差转换到极坐标下[8],则可表示为
 (2)
(2)
其中:ρ为采矿车当前位置与目标位置之间的距离;α为采矿车的视角,即采矿车前进方向与当前位置和目标位置的连线的夹角;f为采矿车目标方向角与当前方向角差值。
参考文献[9]可知,当 即采矿车还没有到达目标位置时,在极坐标下的位姿误差均可以转化为式(2)来表示,且ρ,α和f分量相互独立。为了简化控制律的设计及其证明,令
即采矿车还没有到达目标位置时,在极坐标下的位姿误差均可以转化为式(2)来表示,且ρ,α和f分量相互独立。为了简化控制律的设计及其证明,令 ,则ρ,α和β分量也将是相互独立的,式(2)转变成式(3)。因此,采矿车的点镇定控制问题是将使采矿车在一定的控制律作用下平稳快速地移动至指定的目标点,且保持指定的方向角,即使式(3)的误差能够快速平稳地收敛至0。
,则ρ,α和β分量也将是相互独立的,式(2)转变成式(3)。因此,采矿车的点镇定控制问题是将使采矿车在一定的控制律作用下平稳快速地移动至指定的目标点,且保持指定的方向角,即使式(3)的误差能够快速平稳地收敛至0。
 (3)
(3)
由式(3)可得采矿车位姿误差模型的位姿误差动力学方程为
 (4)
(4)
其中: 为采矿车的位姿误差变化率;
为采矿车的位姿误差变化率; ,
, ,
, 分别为ρ,α,β的变化率;v为采矿车前进速度;ω为采矿车转向角速度。
分别为ρ,α,β的变化率;v为采矿车前进速度;ω为采矿车转向角速度。
参考文献[10],对于形如 的非线性系统,状态空间为x,
的非线性系统,状态空间为x, ,若存在相应的Lyapunov候选函数,则系统在原点处是全局一致渐近稳定的。
,若存在相应的Lyapunov候选函数,则系统在原点处是全局一致渐近稳定的。
依据式(1)和(3),结合Lyapunov直接方法,以采矿车运动过程中的位姿误差(ρ,α和β)为变量,设计点镇定控制系统的控制律U为

 (5)
(5)
其中:K1,K2和K3均为大于0的常数。将式(5)代入式(4),可得采矿车位姿误差的动力学方程表示为
 (6)
(6)
选择Lyapunov候选函数V为
 (7)
(7)
对V进行微分:
 (8)
(8)
其中: 为Lyapunov侯选函数的微分,其与常数K1和K2、位姿误差ρ,α和β及其变化率有关。
为Lyapunov侯选函数的微分,其与常数K1和K2、位姿误差ρ,α和β及其变化率有关。
将式(6)代入式(8),得


 (9)
(9)
分析式(8)和式(9)可知:eP=0是自治系统(6)的平衡点;当K1,K2和K3均为大于0的常数,且当eP≠0时,V>0, ,即V为正定,且为负定,故 eP=0是全局渐近稳定的[11]。也就是说,在所设计的控制律
,即V为正定,且为负定,故 eP=0是全局渐近稳定的[11]。也就是说,在所设计的控制律 的控制作用下,通过合理调节K1,K2和K3参数,海底采矿车的位姿误差会收敛到0,海底采矿车可稳定地镇定到指定位置,且保持在指定方向上,即实现海底采矿车的点镇定控制。
的控制作用下,通过合理调节K1,K2和K3参数,海底采矿车的位姿误差会收敛到0,海底采矿车可稳定地镇定到指定位置,且保持在指定方向上,即实现海底采矿车的点镇定控制。
2 海底采矿车点镇定控制模型
2.1 采矿车机械系统模型
以我国海底采矿车比例为1:20的模型车为研究对象,采用机械系统动力学分析软件/履带车专业工具包(ADAMS/ATV)软件平台,构建模型车多刚体动力学模型和虚拟样机[12]。
2.2 速度限制模块和延时模块
海底采矿车行走采用液压驱动,且海底与海上之间的长距离传输,其控制信号与执行元件之间存在一定延时。为了使采矿车虚拟样机的驱动过程更加接近实际情况,在该系统中加入适当的惯性环节[13]以模拟延时模块。
海底采矿车由左右两侧履带差动驱动以实现行走和转向。由于采矿车受实际结构的影响,其所能达到的最大线速度和转向角速度将受到限制。因此,式(5)所示的前进速度v和转向角速度ω可能会因为超过实际限制范围。为了使控制输入有实际意义,引入采矿车的速度和角速度限制模块,且将有助于减小因控制速度变化太大而引起的打滑等问题。
2.3 点镇定控制框图
海底采矿车的点镇定控制是以采矿车的实时位姿作为反馈量的闭环控制系统。以式(1)和(3)为基础设计位姿误差模块,以式(5)所示的基于Lyapunov理论的控制律设计点镇定控制器模块,且其具有连续时变反馈特性。海底采矿车点镇定控制系统的总体结构框图如图2所示。图2中:Pr,P和Pe分别为采矿车的目标位姿、当前位姿和位姿误差;q为控制输入参数,包含前进速度v和转向角速度ω。

图2 海底采矿车点镇定控制结构框图
Fig. 2 Point stabilization control block diagram of seabed mining vehicle
2.4点镇定控制协同仿真模型
根据图2所示采矿车点镇定控制的结构框图,结合以上所述各个模块的分析及参数调整方法,以MATLAB/Simulink为仿真平台[14],建立目标位姿模块、误差模块、点镇定控制器模块、速度限制和延时模块,同时导入由ADAMS/ATV建立的海底采矿车虚拟样机动力学模型作为被控对象,以采矿车虚拟样机模型的实时位姿作为反馈量,建立整个海底采矿车点镇定机械与控制协同仿真模型如图3所示。

图3 海底采矿车点镇定机械与控制系统协同仿真模型
Fig. 3 Co-simulation model of mechanical and control systems for point stabilization of seabed mining vehicle
3 仿真与分析
3.1 点镇定仿真
根据图3所示的海底采矿车点镇定机械与控制协同仿真模型,开展采矿车从当前位姿移动到目标位姿的点镇定协同仿真。
仿真在二维平面XIOYI上进行,设采矿车的初始出发点为原点O,方向角为0°(与XI轴正向一致),其目标位姿为xr=5 m,yr=5 m,方向角θr=π/4 rad。整个镇定过程即要求采矿车从起始位姿(0,0,0)快速平稳地镇定到目标位姿(xr=5,yr=5,θr=π/4)。
将仿真条件输入海底采矿车点镇定机械与控制协同仿真模型,将由ADAMS/ATV建立的海底采矿车模型车作为控制对象导入协同仿真模型,选定参数K1=3,K2=2,K3=4。设置联合仿真的步长,开展海底采矿车点镇定协同仿真,从而得到海底采矿车的轨迹、控制输入和偏差等参数。
图4所示为海底采矿车虚拟样机在点镇定过程中的质心(x,y)轨迹,图5所示为采矿车点镇定行走过程中前进速度v与转向角速度ω曲线,图6所示为海底采矿车在点镇定行走过程中位姿偏差xe,ye和θe曲线。
3.2 仿真结果分析
由图4可知:采矿车能够快速平稳地从初始位姿(0,0,0)镇定到目标位姿,且稳点在目标位姿上。在点镇定的初始阶段,采矿车边向前运动边调整方向,大约行走3 m后,采矿车方向角与目标方向角π/4 rad一致,此后采矿车直线行走,最终到达目标位置。
分析图5可知:在点镇定初始阶段,由于采矿车实际位置和目标位置的距离最大,相应方向角和目标方向角的误差最大。在所设计的控制律作用下,为了快速地镇定到目标位姿,前行速度v与转回角速度ω的控制输入为最大,分别为vmax=1.0 m/s,ω max=1.44 rad/s,其中,行走速度在0~4.85 s内一直保持在1.0 m/s,这是速度限制模块的作用引起的,且转向角速度没有超出角速度限制的范围。随着采矿车进一步接近目标位姿,控制输入参数值在平稳变小,并最终到达目标位姿,此时前行速度v与转回角速度ω分别为0 m/s和0 rad/s。这与所设计的控制律相符,满足点镇定控制的要求。
分析图6可知:在点镇定开始时,采矿车处在初始出发点,此时,采矿车当前位姿和目标位姿相差最大,XI方向上的偏差xe为5 m,YI方向上的偏差ye为5 m,方向角上的偏差θe为π/4 rad。在所设计的控制律作用下,位姿误差快速平稳地减小,经过3.145 s后,方向角偏差θe首先减少到0°,此时采矿车方向角与目标方向角一致。采矿车继续以目标方向前进,偏差xe和ye继续减小,经过约11 s后,其二者偏差均减小到0 m,此时,采矿车镇定到了目标位姿,从而,完成镇定过程。在该过程中,采矿车在10~16 s转向过程中受到干扰,但仍能够在控制律的控制作用下,快速而平稳地镇定到目标位姿,说明控制模型抗干扰能力强。

图4 海底采矿车点镇定轨迹
Fig. 4 Point stabilization trajectory of seabed mining vehicle

图5 海底采矿车点镇定前进速度v和转向角速度ω曲线
Fig. 5 Curves of moving speed v and angular velocity ω during point stabilization of seabed mining vehicle

图6 海底采矿车点镇定位姿误差曲线
Fig. 6 Position and direction error curves during point stabilization of seabed mining vehicle
4 结论
(1) 基于Lyapunov理论,提出了海底采矿车点镇定控制系统控制律,并证明了在该控制律作用下海底采矿车的位姿误差是收敛的。
(2) 设计了海底采矿车点镇定控制模块、位姿误差模块、速度限制模块、延时模块,利用Matlab软件平台,建立了海底采矿车的机械模型与点镇定控制模型二者的协同仿真模型。
(3) 在基于Lyapunov理论所设计的点镇定控制器的作用下,海底采矿车能快速而平稳地镇定到目标位置和方向,表明所设计的控制器是有效的。
参考文献:
[1] Hong S, Choi J S, Kim H W, et al. A Path tracking algorithm for underwater mining vehicles[J]. Journal of Mechanical and Technology, 2009, 23(12): 2030-2037.
[2] Ma B L, Tso S K. Robust discontinuous exponential regulation of dynamic nonholonomic wheeled mobile robots with parameter uncertaintied[J]. International Journal of Robust Nonlinear Control, 2008, 18(6): 960-974.
[3] Brockett R W. Asymptotic stability and feedback stabilization[M]. Differential Geometric Control Theory, 1983: 181-191.
[4] Jiang Z P. Iterative design of time-varying stabilizers for multi-input systems in chained form[J]. Systems and Control Letters, 1996, 28(5): 255-262.
[5] Astolf A. Discontinuous control of nonholonomic systems[J]. Systems and Control Letters, 1996, 27(1): 37-45.
[6] Kolmanovsky I, McClamroch N H. Hybrid feedback laws for a class of cascaded nonlinear control systems[J]. IEEE Transaction on Automatic Control, 1996, 41(10): 1271-1282.
[7] 西格沃特 R, 诺巴克什 I R. 自主移动机器人导论[M]. 李人厚, 译. 西安: 西安交通大学出版社, 2006: 84-89.
Siegwart R, Nourbakhsh I R. Autonomous mobile robots[M]. LI Renhou, trans. Xi’an: Xi’an Jiaotong University Press, 2006: 84-89.
[8] 曹政才, 赵应涛, 吴启迪. 基于Backstepping和神经动力学的非完整移动机器人点镇定[J]. 电子学报, 2011, 39(3): 591-595.
CAO Zhengcai, ZHAO Yingtao, WU Qidi. Point stabilization of a nonholonomic mobile robor based on backstepping and neural dynamics[J]. Chinese Journal of Electronics, 2011, 39(3): 591-595.
[9] 唐述博. 非完整移动机器人点镇定和轨迹跟踪控制研究[D]. 大连: 大连理工大学控制科学与工程学院, 2005: 23-42.
TANG Shubo. Point stabilization and trajectory tracking control on nonholonomic mobile robot[D]. Dalian: Dalian University of Technology. School of Control and Engineering, 2005: 23-42.
[10] 高为炳. 运动稳定性基础[M]. 北京: 高等教育出版社, 1987: 30-36.
GAO Weibing. Foundation of movement stability[M]. Beijing: Higher Education Press, 1987: 30-36.
[11] Hassan K. Khalil.非线性系统[M]. 朱义胜, 董辉, 李作洲, 译. 3版. 北京: 电子工业出版社, 2011: 73-82.
Hassan K. Khalil. Nonlinear system[M]. ZHU Yisheng, DONG Hui, LI Zuozhou, trans. 3rd ed. Beijing: Pubilishing House of Electronic Industry, 2011: 73-82.
[12] 李力, 邹砚湖. 海底采矿车的路径跟踪的变论域模糊控制研究[J]. 中南大学学报(自然科学版), 2012, 43(2): 389-406.
LI Li, ZOU Yanhu. Tracking moving path of seabed mining vehicle based on theory of variable universe fuzzy control[J]. Journal of Central South University (Science and Technology), 2012, 43(2): 389-406.
[13] 张敏. 基于模糊神经网络的海底采矿车路径跟踪行走控制研究[D]. 长沙: 中南大学机电工程学院, 2010: 19-27.
ZHANG Min. Path tracking control of seabed mining vehicle based on fuzzy neural network[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2010: 19-27.
[14] 邱晓林, 李天柁, 第宇鸣, 等. 基于MATLAB的动态模型与系统仿真工具: Simulink 3.0/4.X[M]. 西安: 西安交通大学出版社, 2003: 72-89.
QIU Xiaolin, LI Tiantuo, DI Yuming, et al. Dynamic model and simulation tool based on MATLAB- Simulink 3.0/4.X[M]. Xi’an: Xi’an Jiaotong University Press, 2003: 72-89.
(编辑 陈灿华)
收稿日期:2013-08-10;修回日期:2013-10-09
基金项目:国家重点基础研究发展计划(“973”计划)项目(2014CB0463005)
通信作者:李力(1963-),女,湖南益阳人,教授,从事机械电子工程、海洋采矿技术研究;电话:13873176735;E-mail:lilicsu@vip.sina.com

