DOI: 10.11817/j.issn.1672-7207.2015.07.014
海底摆臂型履带式移动平台的越障性能
李力1,曹拓1,陈向东2
(1. 中南大学 机电工程学院,湖南 长沙,410083;
2. 深圳市中南宏业高新技术有限公司,广东 深圳,518000)
摘要:采用摆臂型履带车方式作为大洋矿产资源采矿的海底移动平台方案。针对该方案,从运动学的角度开展海底摆臂型履带式移动平台越障机制分析,得其摆臂摆角和车体仰角及越障高度的临界曲面关系图;基于多刚体理论,采用ADAMS/ATV软件,建立海底摆臂型履带式移动平台的三维动力学模型和虚拟样机,对其翻越障碍的动力学进行仿真研究。研究结果表明:越障能力仿真结果与越障能力理论结果的相对误差小于7%,越障能力提高46%;海底摆臂型履带式移动平台的建模与仿真正确,且具优良的越障性能。
关键词:海底移动平台;履带车;越障性能;摆臂;ADAMS软件
中图分类号:TP242,TP391.9 文献标志码:A 文章编号:1672-7207(2015)07-2481-06
Obstacle surmounting performance of a swing-arm-type tracked seabed walking platform
LI Li1, CAO Tuo1, CHEN Xiangdong2
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. Zhongnan Hongye High Technology Co.Ltd., Shenzhen 518000, China)
Abstract: The way of a swing-arm-type tracked vehicle was used as the scheme of the seabed walking platform for marine mining. Obstacle surmounting mechanism of the scheme was analyzed from kinematics, and the diagram of the relationship among the swing-arm’s angle, the elevation angle of the vehicle and the obstacle height were obtained. Based on the multi-rigid-body theory, the virtual prototype of the swing-arm-type tracked seabed walking platform was established and dynamics simulations of obstacle surmounting were obtained by using the ADAMS/ATV software. The results show that the relative deviation between the simulation results of obstacle surmounting performance and the theoretical results are less than 7% and the capability of obstacle surmounting increased by 46%, which indicates the correctness of the modeling and simulation and the good obstacle surmounting performance of the swing-arm-type tracked seabed walking platform.
Key words: seabed walking platform; tracked vehicle; obstacle surmounting performance; swing arm; ADAMS software
随着陆地上矿产资源日益消耗,海洋丰富的矿产资源将成为人类21世纪资源的新来源[1-2]。大洋海山和海脊上蕴藏具有开采价值的钴结壳、热液硫化物等海洋矿产资源。海底移动平台作为海洋采矿系统的载体,是海洋矿产资源采矿系统的关键技术之一,该平台将携带采矿工具、液压系统、电子仓、几千米长扬矿软管和电缆行走于地形极为崎岖的海山和海脊表 面[3],因此,海洋采矿系统要求海底移动平台具有良好的越障性、通过性及重载性。在适用于崎岖地形的海洋采矿移动平台研究方面,王俊杰等[4]将2个履带行走机构通过浮动悬挂铰接于车架上,使其具有较好的越障性能;李小飞等[5]开展铰接式履带行走机构设计与优化,该机构通过铰接机构实现前、后履带车之间的俯仰、侧翻和转向,使其具有极高的复杂地形适用性;李炳华[6]采用车体转向式4个履带行走机构作为海底移动平台,该机构的前后2个履带车相对总车体可俯仰、侧翻和转向,适用于复杂地形。在摆臂履带车研究与应用方面,Vu等[7-8]对摆臂式机器人的性能进行了研究,因其具有良好的越障性能,摆臂式机器人被应用于军事、采矿、搜救等领域;Li等[9-10]采用摆臂履带车方式用于煤矿探测机器人,使其具有优异的越障性能;信建国等[11]开展了履带腿式小型移动机器人研究,研究表明其对复杂地形的适应性良好;Kawatsuma等[12-13]将摆臂型履带机器人应用于搜救等领域,表现出良好的效果。至目前为止,摆臂履带车的研究均限于电驱动的微型模型车,未见采用ADAMS软件[14]开展重载型摆臂履带车动力学研究的相关文献。为此,本文作者采用一种摆臂型履带式行走机构作为海底移动平台行走方案。针对海底摆臂型履带式移动平台方案,开展其越障机制分析,建立虚拟样机,进行越障动力学仿真研究及仿真分析,以期获得海底摆臂型履带移动平台优良的通过性和越障性能,为海洋矿产资源采矿系统提供技术支持。
1 海底摆臂型履带式移动平台方案
海底摆臂型履带式移动平台方案如图1所示。由图1可见:移动平台主要由主履带车、液压油缸、摆臂机构、车架和作业工具及着地平衡装置等组成。其中,主履带车采用驱动轮前置、浮动悬挂、前后倾角、橡胶履带等方式;摆臂机构由驱动轮、支重轮、从动轮、三角形橡胶履带组成。
主履带车驱动轮与摆臂机构驱动轮同轴,两者既可同时运转,又可独立运转。摆臂机构由液压缸控制其从水平至垂直范围内摆动,由此可形成90°前倾角,使摆臂机构可达到较高的障碍边缘,极大地提高了移动平台的越障能力和通过性。
2 海底移动平台越障机制分析
普通履带车的越障过程如图2所示。由图2可知:随着履带车向前运动,车体仰角增大,重心向前和向上移动(见图2(a));当重心水平坐标达到障碍外角线时(见图2(b)),处于临界通过状态,履带车将在自重作用下以障碍外角线为支线向前翻转(见图2(c))至障碍上部(见图2(d)),从而实现履带车的越障。由此可知,履带车重心水平坐标与障碍外角线重合为履带车越障临界条件。
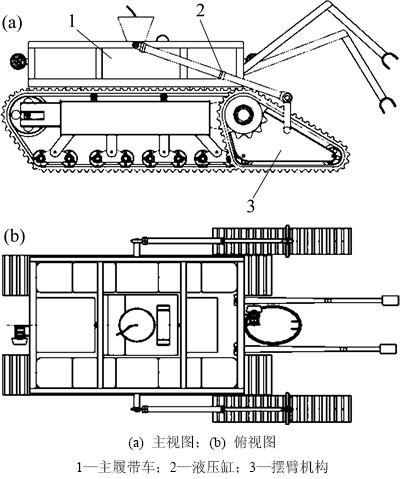
图1 海底摆臂型履带式移动平台方案
Fig. 1 Scheme of swing-arm-type seabed walking platform
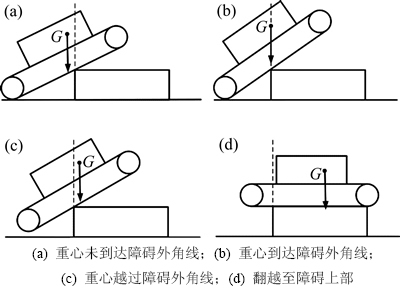
图2 普通履带车越障示意图
Fig. 2 Obstacle surmounting sketch map of normal tracked vehicles
图3所示为海底摆臂型履带式移动平台的越障参数示意图,主要参数如表1所示。在图3中,建立以O1为原点的XO1Y车体坐标系,设摆臂机构摆角β为[0°,90°],车体仰角γ为[0°,60°],海底摆臂型履带式移动平台重心与主车重心和摆臂机构重心有如下关系:
 (1)
(1)
其中:G1为主履带车质量;G2为摆臂机构质量;G为移动平台质量; 为摆臂机构质心与驱动轮连线与2支重轮连线的夹角;β为摆臂机构摆动角度;γ为车体仰角; l1为主履带车质心平行于车身方向到后轮中心的距离;l2为主履带车前后轮质心的距离;l3为摆臂机构质心在平行于其2支重轮连线方向与摆臂机构驱动轮中心的距离;h1为主履带车质心于后轮中心在垂直于车身方向的距离;h2为主履带车中心到履带下边沿的距离;h3为摆臂机构质心在垂直于其2支重轮连线方向与摆臂机构驱动轮中心的距离。
为摆臂机构质心与驱动轮连线与2支重轮连线的夹角;β为摆臂机构摆动角度;γ为车体仰角; l1为主履带车质心平行于车身方向到后轮中心的距离;l2为主履带车前后轮质心的距离;l3为摆臂机构质心在平行于其2支重轮连线方向与摆臂机构驱动轮中心的距离;h1为主履带车质心于后轮中心在垂直于车身方向的距离;h2为主履带车中心到履带下边沿的距离;h3为摆臂机构质心在垂直于其2支重轮连线方向与摆臂机构驱动轮中心的距离。
表1 平台参数值
Table 1 Parameters of platform

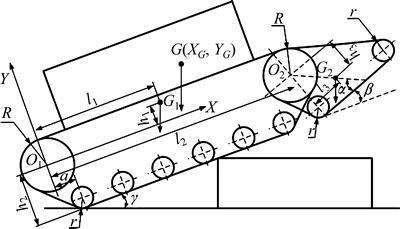
图3 海底摆臂型履带式移动平台越障参数示意图
Fig. 3 Parameter sketch map when seabed walking platform crossing an obstacle
由式(1)得海底移动平台的重心坐标为
 (2)
(2)
由式(2)可知:海底移动平台重心坐标为关于摆臂机构摆角β的函数,说明摆臂机构的摆动角直接影响车体的重心,从而影响海底移动平台越障能力。
图4所示为海底摆臂型履带式移动平台越障临界状态示意图。根据履带车越障临界条件,海底移动平台重心水平坐标与障碍外角线重合,得海底移动平台越障高度为
 (3)
(3)
其中:a为主履带车后轮到最近支重轮沿车身方向的距离;r为支重轮半径。
联立式(2)与(3),用MATLAB软件得海底移动平台在临界通过状态时越障高度H、摆臂机构摆角β和车体仰角γ的关系曲线,如图5所示。
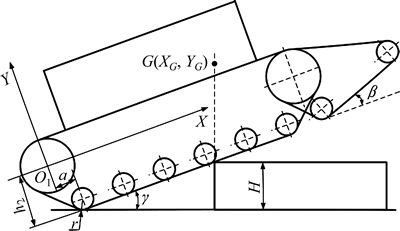
图4 海底摆臂型履带式移动平台越障临界状态示意图
Fig. 4 Sketch map of obstacle surmounting critical condition of swing-arm-type tracked seabed walking platform
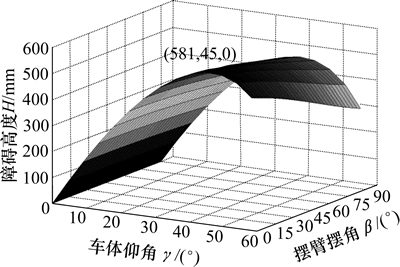
图5 海底移动平台越障高度H、摆臂机构摆角β和车体仰角γ关系曲面
Fig. 5 Surface diagram of relationship among H, β and γ
由图5可知:当摆臂摆角和车体仰角位于曲面上时,所对应的障碍高度为临界越障高度,海底移动平台能越过的最大障碍高度为581 mm,对应的车体仰角为45°,摆臂摆角为0°。由此,海底移动平台在采矿越障过程中可以通过控制和检测其摆臂摆角β和车体仰角γ,判断其越障能力,并可通过优化海底移动平台参数,优化曲面形状,达到提高其越障性能的目的。
海底移动平台在越障临界状态不同车体仰角下越障高度H与摆臂摆角β的关系如图6所示。由图6可知:当障碍高度H≤470 mm,摆臂摆角β在0°~90°时车体均能通过,说明摆臂摆角对越障性能无影响;当470≤H≤580 mm时,摆臂摆角在0°~90°增加时最大越障高度降低,其两者的对应关系为图6中顶部曲线,通过数值拟合求得其近似方程为
 (4)
(4)
式(4)为海底移动平台越障通过性方程。由式(4)可知:当越障高度为500 mm时,其对应临界摆臂摆角约为70.5°;当越障高度为550 mm时,其对应临界摆臂摆角约为32.5°。

图6 越障高度H与摆臂摆角β越障临界的关系
Fig. 6 Relationship between H and β for critical obstacle surmounting
3 海底移动平台越障动力学分析
3.1 海底移动平台虚拟样机建模
ADAMS软件是基于多刚体理论所开发的大型机械系统动力学仿真软件,ADAMS的ATV模块[15]为其专用履带车模块。
根据多刚体理论,机械系统动力学方程为
 ;
;
 (5)
(5)
其中:K为系统动能;ψi为描述系统的广义坐标列;qi为约束方程;Fj为在广义坐标方向的广义力; 为拉格朗日乘子列阵。
为拉格朗日乘子列阵。
以ADAMS/ATV履带车模块为平台,根据海底摆臂型履带式移动平台方案,建立主履带车的车架、驱动轮、从动轮、支重轮、托轮、张紧机构和履带等主要零部件的虚拟样机,及摆臂机构的车架、驱动轮、从动轮、支重轮和履带等主要零部件的虚拟样机,装配主履带车和摆臂机构的主要零部件,建立海底摆臂型履带式移动平台三维多刚体动力学模型和虚拟样机,如图7所示;同时,建立具有海底底质特性的障碍地形模型,并输入其三维多刚体动力学模型中,从而建立海底摆臂型履带式移动平台的越障动力学仿真模型。

图7 海底摆臂型履带式移动平台三维多刚体动力学模型和虚拟样机
Fig. 7 3D dynamics multi-rigid model and virtual prototype model of swing-arm type tracked seabed walking platform
3.2 海底移动平台越障动力学仿真
根据海底摆臂型履带式移动平台越障动力学模型,在ADAMS/ATV履带车平台上,开展海底摆臂型履带式移动平台在不同障碍高度下越障仿真研究。
仿真边界条件如下:行驶速度为1 m/s,直线行驶;垂直障碍,障碍位于车体前方2.5 m,障碍高度分别为400,500,550和580 mm,对于4种障碍高度其摆臂摆角均在0°~90°内取值。
将仿真边界条件输入海底摆臂型履带式移动平台多刚体动力学模型中,开展上述多种越障仿真研究,获得海底摆臂型履带式移动平台主要零部件在越障过程中的动力学仿真曲线及动画效果。图8所示为海底摆臂型履带式移动平台的越障过程之一。
3.3 仿真分析
3.3.1 越障性及通过性分析
表2所示为海底移动平台越高度为400,500,550和580 mm的障碍的通过性仿真实验结果,图9所示为海底移动平台越障400,500,550和580 mm通过点与理论越障通过性曲线。
由表2可知:对于高度为400 mm障碍,摆臂摆角从0°~90°变化时均能翻越,与理论分析结果相吻合;对于500 mm高的障碍,摆臂摆角从0°~66°车体均能翻越,其越障临界摆臂摆角为66°,与理论值的相对误差为6.4%;对于550 mm障碍,摆臂机构摆角从0°~31°车体均能翻越碍,其临界摆臂摆角为31°,与理论值的相对误差为4.6%;对于580 mm障碍,摆臂摆角从0°~90°车体均不能翻越。
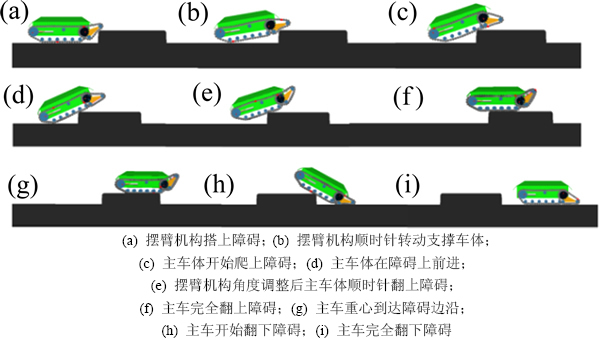
图8 海底摆臂型履带式移动平台越障过程
Fig. 8 Obstacle surmounting processes of swing-arm-type tracked seabed walking platform
表2 平台越障通过性仿真结果
Table 2 Simulation results of obstacle surmounting ability
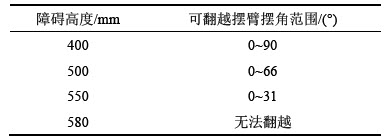
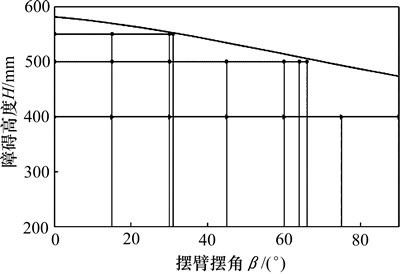
图9 海底移动平台越障仿真通过点与理论越障通过曲线
Fig. 9 Simulation passing dots and theoretical passing curve of seabed walking platform
由图9可知:海底移动平台的仿真通过临界点接近于理论越障通过曲线,且随越障高度的增加,其摆臂的各临界摆角随之减小。两者误差产生的主要原因是海底移动平台越障理论值没有考虑行驶速度和路面摩擦等因素,而海底移动平台动力学仿真考虑了行驶速度和路面摩擦及主动轮、从动轮、支重轮,托轮及履带等多种构件,但两者的相对误差小于6.4%,属于合理范围。由此说明,海底摆臂型履带式移动平台建模与仿真正确。
3.3.2 越障性能分析
海底移动平台越高度为400,500,550和580 mm的障碍时,移开台重心高度的仿真曲线如图10所示,其所对应的摆臂机构摆角β分别为90°,66°,31°和0°。
由图10(a)可知:当海底移动平台运行约2.7 s后,其重心上移,在约6.5 s时重心达到600 mm,在约8.2 s时重心下降,从而顺利越过障碍。由图10(b)可知:当海底移动平台运行2.7 s后,其重心上移,在约8.0 s时重心达到700 mm,在约10 s时重心下降,从而顺利越过障碍。由图10(c)可知:当海底移动平台运行2.7 s后,其重心上移,在约10.0 s时重心达到750 mm,在约12.0 s时重心下降,从而顺利越过障碍。由图10(d)可知:当海底移动平台运行2.7 s后,其重心上移,此后重心保持在约700 mm不变,表明海底移动平台在原地打滑,无法越过障碍。
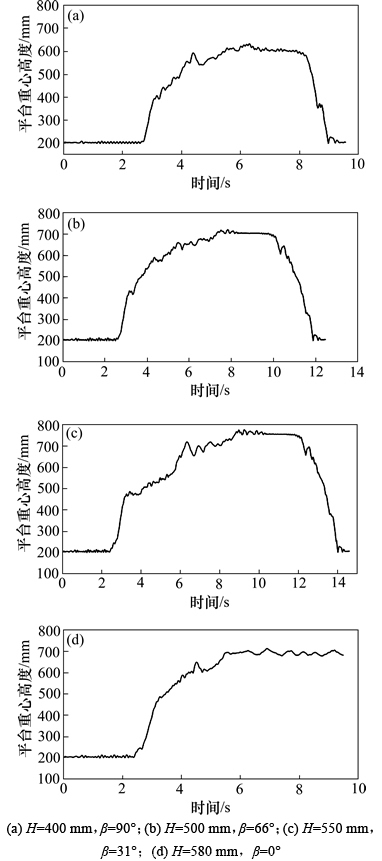
图10 海底移动平台越障重心高度仿真曲线
Fig. 10 Simulation curves of height of seabed walking platform’s center of gravity
由此可知,海底摆臂型履带式移动平台能够通过高度为550 mm的障碍,与理论最大越障高度相对误差为5.3%;相比驱动轮中心高度所决定的最大理论越障高度375 mm,海底摆臂型履带式移动平台越障性能提高了46%;随越障高度的增加,车体到达障碍最高点的时间越长,说明越障的时间越长,打滑程度增加,越障难度增加,与实际履带车的越障过程相吻合。
4 结论
1) 根据海底摆臂型履带式移动平台的越障机制分析,获得摆臂机构摆角和车体仰角与越障高度通过曲面。
2) 基于多刚体理论,建立海底摆臂型履带式移动平台三维动力学模型和虚拟样机,开展当摆臂机构摆角从0°~90°变化时多种障碍高度的动力学仿真研究,获得其通过性状况,与理论通过性曲线吻合,其相对误差均在合理范围内,说明其建模与仿真正确。
3) 海底摆臂型履带式移动平台能够越过高度为550 mm的障碍,越障能力提高46%,说明其在崎岖地形上具有良好越障性能。
4) 海底摆臂型履带式移动平台随着越障高度增加,越过障碍所需时间越长,越障难度增加,与实际履带车的越障过程相吻合。
参考文献:
[1] 阳宁, 王英杰. 海底矿产资源开采技术研究动态与前景分析[J]. 矿业装备, 2012(1): 54-57.
YANG Ning, WANG Yingjie. Research devel opment and prospect analysis of the seafloor mineral resources mining technology[J]. Mining Equipment, 2012(1): 54-57.
[2] Chung J S. Deep-ocean mining technology Ⅲ: Developments [C]// The Eighth ISOPE Ocean Mining Symposium. Cupertino, USA, 2009: 1-7.
[3] 戴瑜, 刘少军. 深海采矿机器人研究: 现状与发展[J]. 机器人, 2013, 35(3): 363-375.
DAI Yu, LIU Shaojun. Researches on deep ocean mining robots: Status and development[J]. Robot, 2013, 35(3): 363-375.
[4] 王俊杰, 李力, 陈金涛. 新型海山钴结壳作业车设计与仿真研究[J]. 机械工程与自动化, 2007(4): 1-3.
WANG Junjie, LI Li, CHEN Jintao. Research on the performance of a new type of deep-sea all-terrain cobalt-crust mining vehicle based on simulation[J]. Mechanical Engineering and Automation, 2007(4): 1-3.
[5] 李小飞, 李力, 周良, 等. 机电液协同仿真技术的钴结壳采矿车行走控制研究[J]. 现代制造工程, 2009(10): 92-96.
LI Xiaofei, LI Li, ZHOU Liang, et al. Research on motion control of cobalt-rich miner based on collaborative simulation[J]. Modern Manufacturing Engineering, 2009(10): 92-96.
[6] 李炳华. 海底车体转向式履带车行走性能的仿真研究[D]. 长沙: 中南大学机电工程学院, 2008: 11-21.
LI Binghua. Simulation research on a seabed tracked vehicle with wagon steer[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2008: 11-21.
[7] Vu Q H, Kim B S, Song J B. Autonomous stair climbing algorithm for a small four-tracked robot[C]// International Conference on Control, Automation and Systems. Seoul, Korea, 2008: 2356-2360.
[8] Lee C H, Kim S H, Kang S C, et al. Double track mobile robot for hazardous environment[J]. Advanced Robotics, 2003, 17(5): 447-459.
[9] LI Yibin, LI Caihong, CHEN Ping. Research and design of control system for a tracked SAR robot under coal mine[C]// International Conference on Automation and Logistics, Shenyang, China, 2009: 1957-1960.
[10] 李允旺, 葛世荣, 朱华, 等. 四履带双摆臂机器人越障机理及越障能力[J]. 机器人, 2010, 32(2): 157-165.
LI Yunwang, GE Shirong, ZHU Hua, et al. Obstacle- surmounting mechanism and capability of four-track robot with two swing arms[J]. Robot, 2010, 32(2): 157-165.
[11] 信建国, 李小凡, 王忠, 等. 履带腿式非结构环境移动机器人特性分析[J]. 机器人, 2004, 26(1): 35-39.
XIN Jianguo, LI Xiaofan, WANG Zhong, et al. Performance analysis of track-leg mobile robot in unstructured environment[J]. Robot, 2004, 26(1): 35-39.
[12] Kawatsuma S, Fukushima M, Okada T. Emergency response by robots to Fukushima-Daiichi accident-summary and lessons learned[J]. Industry Robot, 2012, 39(5): 428-435.
[13] Ventura R, Lima P U. Search and rescue robots: The civil protection teams of the future[C]// Third International Conference on Emerging Security Technologies. Lisbon Portugal, 2012: 12-19.
[14] 李增刚. ADAMS入门详解与实例[M]. 北京: 国防工业出版社, 2006: 53-67
LI Zenggang. ADAMS detailed introduction and examples[M]. Beijing: National Defense Industry Press, 2006: 53-67.
[15] WANG Zhenyu, LIU Shaojun, LI Li. Crawling feasibility simulation study on tracked vehicle for deep ocean mining[J]. Journal of System Simulation, 2004, 16(4): 644-646.
(编辑 刘锦伟)
收稿日期:2014-08-09;修回日期:2014-10-16
基金项目(Foundation item):国家重点基础研究发展计划(973计划)项目(2014CB046305) (Project(2014CB046305) supported by the National Basic Research Development Program (973 Program) of China)
通信作者:李力,教授,硕士生导师,从事海洋技术、车辆技术与机电一体化等研究;E-mail: lilicsu@vip.sina.com

