海底采矿车路径跟踪的变论域模糊控制
李力1, 2,邹砚湖1
(1. 中南大学 机电工程学院,湖南 长沙,410083;
2. 深海矿产资源开发利用技术国家重点实验室,湖南 长沙,410012)
摘要:采用ADAMS/ATV软件建立海底采矿车机械系统模型,利用MATLAB/Simulink平台建立以速度内环和方位外环的行走控制系统模型及机械系统与行走控制系统协同仿真模型;针对海底环境的复杂性和未知性,采用变论域理论设计纠正方向和位置偏差的自适用模糊控制器以及PID控制理论设计速度控制器,开展海底采矿车在越单边障碍时过程中按预定路径行走仿真研究。仿真结果表明:基于变论域模糊控制理论所设计的海底采矿车路径跟踪控制模型的鲁棒性良好,其方位偏差纠正及速度跟踪的响应速度快、稳态性好、控制效果好,实现了海底采矿车按预定路径行走,为海底采矿车在采矿过程中自动行走控制提供了有效的控制方法。
关键词:海底采矿车;变论域理论;模糊控制;协同仿真
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2012)02-0489-08
Tracking moving path of seabed mining vehicle based on theory of variable universe fuzzy control
LI Li1, 2, ZOU Yan-hu1
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. State Key Laboratory of Deep Sea Mineral Resources Development and Utilization Technology, Changsha 410012, China)
Abstract: The multi-rigid body dynamical model of the seabed mining vehicle was built using ADAMS/ATV software. The moving control model of the seabed mining vehicle, which is composed of the speed inner loop and orientation outer loop together, was built by MATLAB/Simulink software. And the co-simulation model of the seabed mining combined with the dynamical model and the moving control system together was also built using MATLAB/Simulink software. Due to the complicated and unknown factors on the seabed, the self-adaptive fuzzy controller based on theory of the variable universe was designed to correct the orientation error of the seabed mining vehicle. The speed controller based on the theory of PID was designed to keep the given speed of the seabed mining vehicle. The seabed mining vehicle’s co-simulation to keep the linear of the moving path was carried out while it went over the barrier just through the right track. The simulation results show that the seabed mining vehicle’s moving control model built by the theory variable universe possesses good robustness, fast and stable response characteristics on two aspects of the orientation error and the speed tracking, and the good effect on tracking the moving along the mining path, thereby the moving along the mining path is realized. And a kind of effective method is supplied to control the seabed mining vehicle to move along the mining path in the ocean mining.
Key words: seabed mining vehicle; theory of the variable universe; fuzzy control; co-simulation
海底采矿车是开采富存于水深0.8~2.5 km海山表面的矿产资源-钴结壳关键设备。为了高效而可靠地开采钴结壳,其采矿系统要求海底采矿车按预定路径行走。但是,由于存在上千米海水覆盖、不可见的海山表面地形、海底洋流等多种恶劣因素,使得海底采矿车的行走路径极易于偏航,无法在矿区按预定轨迹行走。因此,寻求一种智能路径跟踪方法使海底采矿车有效地按预定路径行走是必要的,对于海洋矿产资源-钴结壳采矿而言具有重要意义[1]。目前,我国对于深海矿产资源海底采矿车按预定路径行走控制方法研究处于起步阶段。李力等[2]针对海底采矿车液压系统建立控制模型,采用PID控制方法实现左右履带行走速度跟踪,运用陆地车辆驾驶经验,建立模糊控制规则来实现自动跟踪预定路径模型。李小飞等[3]针对海底采矿车机械系统和液压系统建立协同仿真模型,采用改进的微分先行PID控制策略来跟踪速度控制信号,同样利用陆地车辆驾驶经验,建立模糊控制规则来纠正行走方位偏差。文献[2-3]中采用了成熟的PID控制方法跟踪速度取得了良好的效果,尤其在文献[3]中采用的微分先行PID避免了输入控制量发生突变而造成液压冲击导致控制效果变差的问题。但是,由于常规模糊控制器规则是基于专家知识制定,而海底采矿车的专家知识难以获取,使得其模糊控制难以获得较精准的规则,并且由于输入输出的模糊划分是固定的,随着行走控制过程中误差和误差变化率变小,模糊控制器调节变得粗糙,自适应性较差;此外,在误差较小和环境变化较复杂时时常造成专家经验局部失效即陷入“调节死区”[4],使得路径跟踪时消除误差的响应过慢,较难满足快速而精确地纠正海底采矿车路径方位偏差的要求。由于海底地形崎岖不平和履带式海底采矿车结构复杂,海底采矿车按预定轨迹行走时具有很强的非线性和不确定性,这就要求其行走控制系统要满足非线性控制和自适应性要求。在此,本文作者引入变论域模糊控制理论,提出一种在行走控制过程中实时评价行走控制系统优劣,并实时修正控制策略的自适应模糊控制方法,以实现海底采矿车在复杂地形上按预定路径行走的高效控制。
1 海底采矿车机械系统建模
我国海底采矿车采用履带车的方式。为了控制算法研究的需要,在不改变控制原理的前提下以海底采矿车1:20比例的模型车作为本文研究算法的被控对象。基于多刚体动力学理论,利用机械系统动力学分析软件/履带车专业工具包ADAMS/ATV软件平台,构建海底采矿模型车多刚体三维动力学模型和虚拟样机,如图1所示。
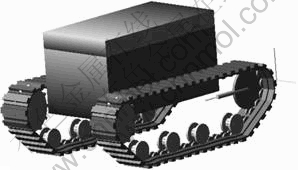
图1 海底采矿模型车多刚体三维动力学模型和虚拟样机
Fig.1 Dynamic model of three-dimensional multi-body and virtual prototype of seabed mining vehicle
2 行走控制模型
海底采矿模型车在海底采矿过程中要求车体以设定速度自动跟踪预定开采路径,在遇到干扰而发生路径和方向偏差时能快速、准确地纠正偏差,返回预定路径,以此高效地开采海底矿产资源。
2.1 运动学模型
根据履带车转向特征,假设海底采矿模型车行走运动模型为二维运动模型[2]。模型车的行走速度为:
 (1)
(1)
其中:ν为车体行走速度;νl为左履带行走速度;νr为右履带行走速度;ω为车体行走角速度;B为履带中心距。设采矿预定路径为直线,预定行走路径目标方向θe到车体行走实际方向θr的夹角为方向偏差e(θ),规定e(θ)逆时针为正,车体实际位置yr与预定行走路径对应点的目标位置ye差值为位置偏差e(y),其规定如图2所示。
2.2 行走控制模型
海底采矿模型车路径跟踪控制模型采用速度内环和方位外环的双环控制策略。速度内环采用微分先行的PID方法跟踪给定速度vl和vr;方位外环采用自适应纠偏模糊控制器纠正车体的位置偏差e(y)和方向偏差e(θ),构建起海底采矿车按预定路径行走的机械-控制系统协同仿真模型。
如图3所示,机械-控制系统协同仿真模型主要由2部分组成。其中:控制模型基于MATLAB/Simulink
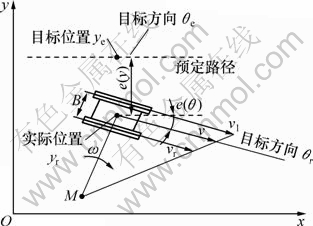
图2 海底采矿车运动学模型
Fig.2 Kinematics model of seabed mining vehicle
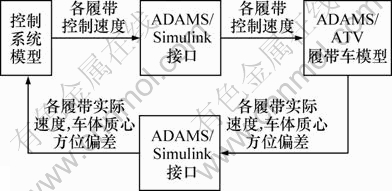
图3 机械-控制系统协同仿真结构示意图
Fig.3 Mechanical system and control system co-simulation structure schematic
软件建立,机械模型基于ADAMS/ATV软件建立。两者通过2个软件之间的通信接口来实现同步仿真。如图3所示,控制模型通过ADAMS/Simulink接口将各履带控制速度输入到机械模型――ADAMS/ATV履带车模型中,机械模型根据输入的控制速度进行多刚体动力学运算,输出当前履带车模型的实际速度以及质心的方位偏差,这些量又通过ADAMS/Simulink接口输出到控制系统模型中,控制系统模型根据当前的方位偏差以及实际速度,运行控制模型。
在仿真过程中,控制系统模型运算与机械系统多刚体动力学运算始终同步,2个软件之间通过设置的数据交换时间2 ms来实现数据的交换。在协同仿真前,仿真的相关参数在各自软件中设置,如仿真的总体时间在MATLAB中进行设置,机械系统的运行环境如地面摩擦因数等则在ADAMS/ATV中设置。
该模型主要由速度分配模块、PID控制模块、延时模块、自适应纠偏模糊控制模块、海底采矿模型车多刚体动力学模型组成,如图4所示。其工作原理为:速度分配模块根据给定车体速度vc和由自适应纠偏模糊控制器输出的纠偏转向角速度ω进行计算输出左、右履带给定速度vl和vr;PID控制器根据左右履带给定速度与机械系统输出的实际履带速度的比较进行运算输出左右履带的速度控制信号;根据液压系统响应的延时特性设置延时模块、速度控制信号经延时模块后,输入海底采矿车机械系统中;ADAMS/ATV海底采矿车模型根据输入的控制信号执行动作;ADAMS/ATV采矿模型通过计算输出左右履带当前的实际行走速度、位置偏差e(y)和方向偏差e(θ),左、右履带实际行走速度与给定速度vl和vr进行比较用于PID控制器根据偏差值输出履带速度控制信号,位置偏差e(y)和方向偏差e(θ)输入至自适应纠偏模糊控制器,自适应纠偏模糊控制器根据当前方向偏差和位置偏差进行运算,输出纠正方位偏差所需的车体转向角速度,如此循环,从而达到跟踪海底采矿车给定速度和预定路径的目的。
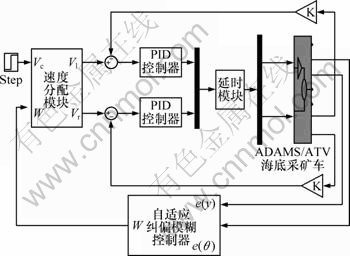
图4 海底采矿车机械-控制系统协同仿真模型
Fig.4 Co-simulation model on mechanical and control systems of seabed mining vehicle
2.3 基于变论域自适应模糊控制器设计
变论域模糊控制方法是在普通模糊控制系统的基础上,通过实时评价被控对象输出误差以及误差变化率特征,实时调整模糊控制器的模糊划分,实现模糊控制系统的自适应变化[4~6]。由于论域的实时调整,相当于增加了模糊控制规则数目,从而提高了控制精度。论域调整在控制过程中会根据系统的输出特征进行实时调整,其初始规则的准确性要求降低,克服了由于专家经验不足而引起的控制系统精度过低的情况。
本文所设计的变论域模糊控制器为二级可变论域型。二级可变论域模糊控制器是在保持模糊规则不变的前提下,通过模糊控制器Ⅰ根据当前系统输出的位置偏差e(y)和方向偏差e(θ)进行推理获得模糊控制器Ⅱ的论域伸缩因子,利用该伸缩因子以及由伸缩因子计算得到的比例因子改变变模糊控制器Ⅱ的模糊划分,从而达到实现新的模糊控制器Ⅱ的结构的目的;然后,利用得到的新控制器进行模糊推理,最终输出车体转向角速度ω,在控制过程中模糊控制器Ⅱ的模糊集论域随输入变小而收缩,或随输入变大而扩展。论域的伸缩增加了模糊控制语言变量值及控制规则,从而提高了控制精度[6]。
2.3.1 变论域模糊控制理论
设Xi=[-E,E](i=1,2,…,n)为输入变量Xi(i=1,2,…,n)的论域,Y=[-U,U]为输出变量y的论域;ui={Aij}(1≤j≤m)为Xi(i=1,2,…,n)上的模糊量;β={Bj}(1≤j≤m)为Y上的模糊量。视ui和β为语言变量,可以形成模糊推理规则[7]:
If x1 is A1j and x2 is A2j and … and xn is Anj,then y is Bj, j=1, 2, …, m (2)
设Xij为Aij的峰点,yj为Bj的峰点 (i=1,2,…,n;j=1,2,…,m),根据文献[8]的结果,基于式(3)的模糊控制系统(即模糊控制器)可以表示为一个n元的插值函数:

(3)
所谓变论域就是指论域Xi和Y可以随着变量xi和y的变化而自动调整,记为:
Xi(xi)=[-a(xi)Ei,a(xi)Ei] (4)
Y(y)=[-β(y),β(y)U] (5)
其中:a(xi)(i=1,2,…,n)与β为论域的伸缩因子,相对于变论域,原来的论域称为初始论域。根据文献[9],基于式(5)和式(6)的变论域自适应模糊控制器可以表示为如下n元分片动态插值函数:

 (6)
(6)
其中:x(t) (x1(t),x2(t),…,xn(t))T。
(x1(t),x2(t),…,xn(t))T。
从式(7)可以看出:模糊控制器的输入变量的论域调整可以等价于在控制器的输入除以相应的伸缩因子,输出变量的论域调整等价于对模糊控制器输出乘以相应的伸缩因子[10]。
2.3.2 变论域模糊控制器结构
根据变论域模糊控制理论,本文设计的变论域模糊控制器由2个模糊控制器构成,结构如图5所示。
模糊控制器I将根据ADAMS/ATV海底采矿模型车车体位置偏差e(y)和方向偏差e(θ)进行模糊推理,
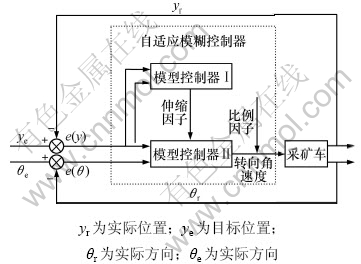
图5 自适应模糊控制器结构图
Fig.5 Structure diagram of the self-adaptive fuzzy controller
输出作用于模糊控制器Ⅱ的伸缩因子。模糊控制器Ⅱ首先根据模糊控制器Ⅰ输出的伸缩因子以及由伸缩因子计算得到的比例因子进行输入变量论域的调整,获得新的模糊控制器,然后,新模糊控制器根据车体位置偏差e(y)和方向偏差e(θ)进行模糊推理,输出履带车的转向角速度,最终将所得到的车体转向角速度输入到海底采矿模型车机械模型中。机械模型经过运算输出实际位置与实际方向,与目标位置和目标方向比较后得到方位偏差用于下一次纠偏控制循环。
2.3.3 模糊控制器Ⅰ设计
模糊控制器Ⅰ主要是根据ADAMS/ATV海底采矿模型车输出的方位偏差进行模糊推理输出模糊控制器Ⅱ的伸缩因子。考虑到论域伸缩因子仅仅影响论域伸缩的程度,并无正负符号之分,因此,可将模糊控制器I的输入变量求绝对值再进行归一化:
 (7)
(7)
以函数f(t)作为模糊控制器Ⅰ的实际输入变量。显然,经过如上处理,模糊控制器Ⅰ被转化为单输入单输出型模糊控制器,其输入变量f(x)的论域范围为 [0,1],输出变量的论域范围也为[0,1]。模糊子集均定义为:{零(ZE),正小(PS),正中(PM),正大(PB)}。隶属度函数均为三角形隶属度函数,得到模糊推理规则如表1所示。
模糊控制器Ⅰ输出为模糊控制器Ⅱ的输入变量的伸缩影子a(t),取方位误差的伸缩因子均为a(t),输出转向角速度的比例因子为a(t)+b(b为常数),经过反复试验,取b为0.7[11]。
2.3.4 模糊控制器Ⅱ设计
模糊控制器Ⅱ作为执行纠正方位偏差任务的纠偏控制器。根据前面的分析可知:为了改变模糊控制器的论域,可以通过在模糊控制器的输入输出乘以相应的比例系数来实现。通过改变输入输出的比例系数间接改变模糊控制器的论域,从而实现模糊控制器结构的变更。故模糊控制器Ⅱ由初始论域模糊控制器和输入输出环节比例系数2部分组成,其中输入输出环节比例系数为模糊控制器Ⅰ得到的伸缩因子以及由伸缩因子计算得到的伸缩因子。模糊控制器Ⅱ结构如图6所示。
表1 论域伸缩因子模糊规则推理表
Table 1 Fuzzy rule reasoning table of universe dilation factor

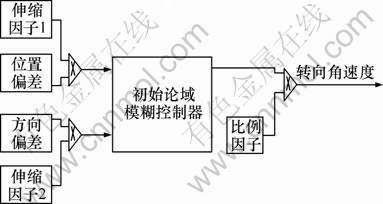
图6 模糊控制器Ⅱ结构图
Fig.6 Structure diagram of fuzzy controllerⅡ
经过上述分析可知:模糊控制器II的设计的重点在于初始论域模糊控制器的设计。初始论域模糊控制器采用普通模糊控制理论设计,该控制器为常规模糊控制器。初始论域模糊控制器的控制规则如下。
(1) 若位置偏差和方向偏差均很大,且车体运动方向为偏离路径方向,则转向角速度很大,使得车体快速转向返回预定路径。
(2) 若位置偏差和方向偏差均很大,但车体运动方向为靠近路径方向,则转向角速度较小,使得车体迅速靠近预定路径。
(3) 若位置偏差较小而方向偏差很大,或者位置偏差很大而方向偏差较小,则转向角速度较小或者 中等。
(4) 转向角速度正负号由位置偏差与方向偏差符号决定。
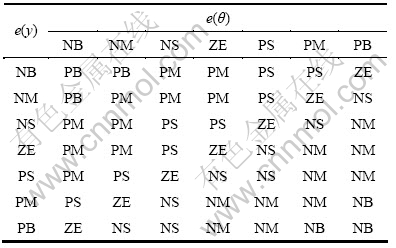
基于上述规则建立模糊规则推理表,如表2所示。其中:NB,NM,NS,ZE,PS,PM和PB分别代表为负大、负中、负小、零、正小、正中、正大。
设初始论域模糊控制器方位角偏差的初始论域为[-15,15],单位为(°);位置偏差的初始论域为[-0.5,0.5],单位为m;车体转向角速度的初始论域为[-0.5,0.5],单位为rad/s。隶属度函数均取为三角形隶属度函数。
表2 转向角速度模糊规则推理表
Table 2 The fuzzy rule reasoning table of steering angular velocity
3 海底采矿模型车仿真研究
根据图4所示的海底采矿模型车机械-控制系统协同仿真模型,基于MATLAB/Simulink和ADAMS/ATV软件开展海底采矿模型车越单边障碍的机械-控制协同仿真。
仿真条件如下:模型车初始速度为0 m/s,行走速度为0.8 m/s,仿真时间为20 s,障碍垂直高度为0.3 m,宽度为0.5 m,垂直障碍位于履带车右侧履带前端约1.5 m处,左侧履带为平地。图7所示为海底采矿模型车在越单边障碍时的机械-控制系统协同仿真虚拟 样机。
将仿真条件输入海底采矿车机械-控制系统协同仿真模型,设置二者的仿真步长,开展海底采矿车机械-控制系统协同仿真,获得海底模型车在变论域模糊控制器作用下车体的行走速度、路径和方位等多种参数、曲线和动画效果。
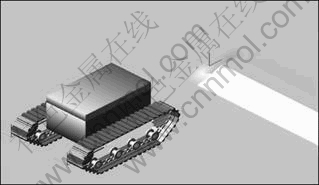
图7 海底采矿模型车机械系统与控制系统协同仿真虚拟样机(越单边障碍)
Fig.7 Virtual prototype of mechanic and control co-system of seabed mining vehicle (barrier on right track)
此外,本文开展了采用以初始论域模糊控制器作为常规模糊控制器的海底采矿模型车在同等边界条件下的仿真研究,便于二者控制效果的比较。
此处只列出了车体在2种控制器作用下主要参数的仿真结果曲线。图8和图9所示分别为海底采矿模型车方向偏差曲线和位置偏差曲线,图10所示为海底采矿模型车的行走轨迹图,图11所示为海底采矿模型车转向角速度控制信号曲线,图12和图13所示分别为海底采矿模型车左、右履带速度控制信号与实际速度曲线。
分析图8~10可知:海底采矿模型车在右履带遇到障碍后向右偏转,在纠偏控制器作用下,海底采矿模型车的方向和位置偏差很快地被纠正分别趋于0°和0 m,质心轨迹回归至预定路径,说明海底采矿模型车实现了预定轨迹自动行走。但是,由于路径跟踪控制方法不同,其控制效果有所不同。当采用基于变论域模糊控制理论的自适应纠偏模糊控制器时,车体所产生的最大方向偏差和位置偏差分别为向右0.242 4 m和-15.47°,比采用常规模糊方法时分别减小了41.5%和23.2%;车体路径偏差和方向偏差响应时间为12 s和15 s,比采用常规模糊控制方法时分别减小41.7%和26.7%;车体前进10 m时,车体质心已回归至预定路径,比采用常规模糊方法时缩短了40%;其路径偏差和质心轨迹无超调,而采用常规模糊控制方法时均存在超调量。
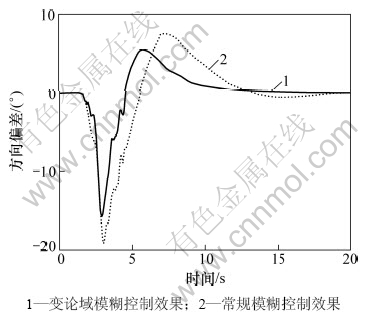
图8 海底采矿模型车方向偏差曲线
Fig.8 Direction error curves of seabed mining vehicle
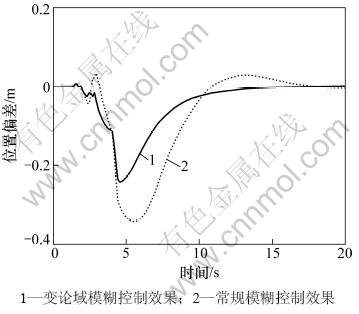
图9 海底采矿模型车位置偏差曲线
Fig.9 Location error curves of seabed mining vehicle
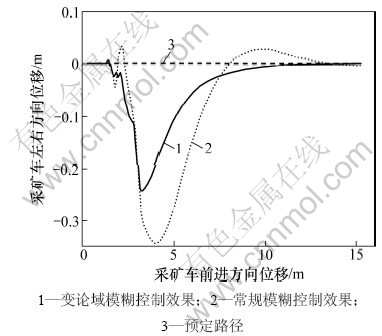
图10 海底采矿模型车车体质心轨迹图
Fig.10 Curves of center of mass of seabed mining vehicle
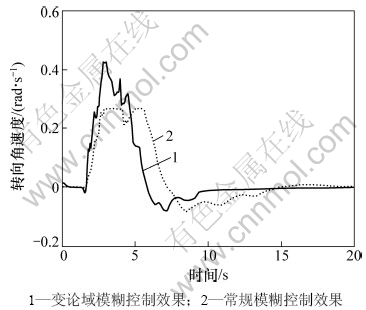
图11 海底采矿模型车转向角速度控制信号曲线
Fig.11 Control signal curves of angle speed of seabed mining vehicle
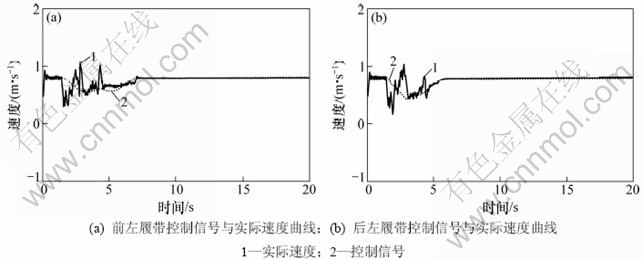
图12 左履带控制信号与实际速度曲线
Fig.12 Curves of control signal the actual speed of left track of seabed mining vehicle
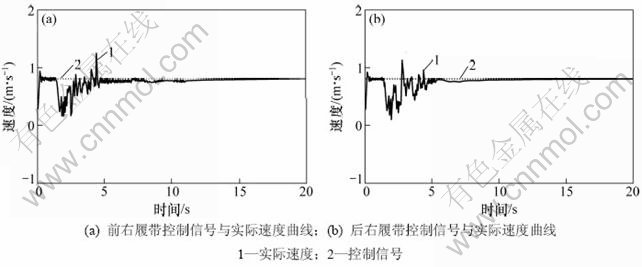
图13 右履带控制信号与实际速度曲线
Fig.13 Curves of control signal and actual speed of right track of seabed mining vehicle
分析图11可知:在变论域控制器作用下转向角速度控制信号量随着车体方向偏差和位置偏差变化而实时调整输出量,其响应时间为10 s,比常规控制器的减少90%;在车体行走至3 s和4 s时,车体方向偏差和位置偏差均为最大,变论域控制器均输出了峰值转向角速度控制信号,分别为0.43 rad/s和0.38 rad/s,使车体在较大纠偏信号下能快速加预定路径;随着车体方向偏差和位置偏差的减小,变论域控制器的输出转向角速度控制信号输出随之减小,而常规模糊控制器输出的转向角速度控制信号在一定时间内保持0.28 rad/s,无法根据车体的方位偏差实时调整输出量,因而,其响应时间大于变论域控制器的响应时间。
分析图12和图13可知:海底采矿模型车在遇到障碍时左、右履带速度降低,在PID控制器作用下,左、右履带速度在7 s时均稳定于0.8 m/s,其中主要是调节左履带的速度;由于2种控制方法的速度控制模型均采用PID控制器,故二者速度控制趋势基本 相同。
从上分析说明:采用变论域模糊控制方法的行走路径跟踪模型是可行的和有效的,其控制器鲁棒性好、响应速度快、无超调、控制效果好。
4 结论
(1) 建立了海底采矿模型车的多刚体运动力学模型。
(2) 建立了以速度内环和方位外环的行走控制系统模型及机械系统与控制系统协同仿真模型。
(3) 设计了基于变论域模糊控制理论的方位外环自适用控制器和速度内环PID控制器,开展了海底采矿模型车在越单边障时按预定路径行走仿真研究。
(4) 基于变论域模糊控制理论所设计的海底采矿模型车行走路径跟踪控制模型的鲁棒性良好,其方向和位置偏差及速度跟踪的响应速度快、稳态性好、控制效果好,实现了海底采矿模型车越障时按预定路径行走,为海底采矿模型车在采矿过程中自动行走控制提供了有效的控制方法。
参考文献:
[1] LI Li, ZHONG Jue. Research of China’s pilot-miner in the mining system of poly-metallic nodule[C]//The proceedings of the sixth(2005) ISOPE Ocean Mining Symposium, 2005. California: ISOPE, 2005: 124-131.
[2] 李力, 邹兴龙. 海底机器人自动跟踪预定开采路径控制[J]. 机械工程学报, 2007, 43(1): 151-157.
LI Li, ZOU Xing-long. Seafloor robot’s control on tracking automatically planning mining paths[J]. Chinese Journal of Mechanical Engineering, 2007, 43(1): 151-157.
[3] 李小飞, 李力, 周良. 机电液协同仿真技术的钴结壳采矿车行走控制研究[J]. 现代制造工程, 2009(10): 92-96.
LI Xiao-fei, LI Li, ZHOU Liang. Research on motion control of cobalt-rich miner based on collaborative simulation[J]. Modern Manufacturing Engineering, 2009(10): 92-96.
[4] 叶建雄, 张华, 杨武强. 焊缝跟踪的变论域自适应模糊控制[J]. 焊接学报, 2005, 26(12): 32-34.
YE Jian-xiong, ZHANG Hua, YANG Wu-qiang. Weld tracking of variable universe adaptive fuzzy control[J]. Transactions of the China Welding Institution, 2005, 26(12): 32-34.
[5] 王其东, 王祺明, 陈无畏. 磁流变半主动悬架变论域模糊控制研究[J]. 振动工程学报, 2009, 22(5): 512-518.
WANG Qi-dong, WANG Qi-ming, CHEN Wu-wei. Advanced variable universe fuzzy control of with magneto-rheological suspension[J]. Journal of Vibration Engineering, 2009, 22(5): 512-518.
[6] 周娜, 张殿华, 吴迪. 变论域模糊控制在带钢卷取温度控制中的应用[J]. 计算机仿真, 2007, 24(7): 164-167.
ZHANG Na, ZHANG Dian-hua, WU Di. Fuzzy control with variable region for coiling temperature in hot strip mill[J]. Computer Simulation, 2007, 24(7): 164-167.
[7] 李洪兴. 变论域自适应模糊控制器[J]. 中国科学: E辑, 1999, 29(1): 32-42.
LI Hong-xing. Variable universe adaptive fuzzy controller[J]. Science in China: E, 1999, 29(1): 32-42.
[8] 李洪兴. 模糊控制的插值机理[J]. 中国科学: E辑, 1998, 28(3): 259-267.
LI Hong-xing. Interpolation mechanism of fuzzy control[J]. Science in China: E, 1998, 28(3): 259-267.
[9] 李洪兴, 苗志宏, 王加银. 非线形系统的变论域稳定自适应模糊控制[J]. 中国科学: E辑, 2002, 4(1): 211-223.
LI Hong-xing, MIAO Zhi-hong, WANG Jia-yin. Non-linear system of variable universe stable adaptive fuzzy control[J]. Science in China: E, 2002, 4(1): 211-223.
[10] 赵宏, 徐红兵, 朱贵平. 变论域自适应模糊控制在航电发电中的应用[J]. 控制理论与应用, 2008, 25(2): 253-256.
ZHENG Hong, XU Hong-bing, ZHU Gui-ping. Adaptive fuzzy control based on variable universe and its application to aero engine turbine power generator[J]. Control Theory and Applications, 2008, 25(2): 253-256.
[11] 黄之初, 杨建林, 蒋冬青. 二级可变论域模糊控制器的设计与仿真试验[J]. 武汉理工大学学报, 2005, 27(8): 87-90.
HUANG Zhi-chu, YANG Jian-lin, JIANG Dong-qing. Design and simulation of two stage changeable universe fuzzy controller[J]. Journal of Wuhan University of Technology, 2005, 27(8): 87-90.
(编辑 陈灿华)
收稿日期:2011-06-35;修回日期:2011-09-10
基金项目:国家大洋专项(DYXM-115-04-02-03);国家高技术研究发展计划(“863”计划)项目(2006AA09Z232,2007AA091901)
通信作者:李力(1963-),女,湖南益阳人,教授,从事机械电子工程、海洋采矿技术研究;电话:13873176735;E-mail:lilicsu@vip.sina.com

