船舶推进系统的BP神经网络广义最小方差控制器
杨杨1,郭晨1,孙建波2
(1. 大连海事大学 信息科学技术学院,辽宁 大连,116026;
2. 大连海事大学 轮机工程学院,辽宁 大连,116026)
摘要:以大型集装箱船舶的柴油主机为控制对象,应用准稳态建模方法建立了包含螺旋桨、大型低速二冲程柴油机、轴系和船舶动力学特性的船舶推进系统全工况实时仿真数学模型;研究基于BP神经网络的广义最小方差控制算法,并将其引入到船舶柴油机调速系统中。仿真结果表明:在大风浪条件下,该算法控制效果优于传统的PID控制器的控制效果,为解决复杂海况下主机转速大幅波动出现增压器喘振问题提供了理论参考。
关键词:广义最小方差;BP神经网络;船舶推进系统;仿真数学模型
中图分类号:U675.5+1 文献标志码:A 文章编号:1672-7207(2011)S1-0001-07
A generalized minimum variance controller based on BP neural network for marine propulsion system
YANG Yang1, GUO Chen1, SUN Jian-bo2
(1. Information Science and Technology College, Dalian Maritime University, Dalian 116026, China;
2. Marine Engineering College, Dalian Maritime University, Dalian 116026, China)
Abstract: The nonlinear mathematical model of main propulsion system of a large container ship was established with the application of the quasi steady state and mixed modeling methods. This model, which included the propeller, the large-scale low-speed two-stroke diesel engine, the shaft and the dynamic characteristics of the ship, was used to investigate the generalized minimum variance self-tuning regulator based on BP neural network, and was introduced into the speed controlling system of marine diesel engine. The simulation results verify the effectiveness of the resulting controller and show the advantage of the proposed controller over traditional PID actuator. It also provides certain theory reference for the improvement of the turbocharger surge caused by the oversized rotation speed oscillations under the condition of rough sea.
Key words: GMV; BP neural network; marine propulsion system; simulation modeling
船舶推进系统是一个船体―柴油机―桨配合的复杂、非线性控制系统,传递函数、状态空间等模型表达式很难完全描述其特性,具有建模难度大的特 点;传统工程中核心控制方案普遍采用常规PID控制算法[1-6]。鉴于PID调速器存在稳定性和快速性之间的矛盾以及该控制方案存在不能适应海况等外部因素变化的缺点,特别是恶劣海况下螺旋桨浮出水面会造成转速的大幅度波动而出现增压器喘振现象,轮机管理人员必须依靠降低设定转速或者选择恶劣海况控制模式来消除喘振的发生。可见,在特殊工况下传统PID控制器仍然存在不足。最近十几年来,国内外科技工作者对柴油机调速性能进行了改进研究,如:林云 聪[3]提出了一种自适应PID控制策略;王芝秋等[4]提出了一种模式分离PID控制算法。国外各大公司也有相应技术革新,但考虑到知识产权以及国家利益,一直对其产品中的关键技术高度保密。仿真方面,张显库研究了基于闭环增益成形算法给出船舶柴油机鲁棒PID算法[3],赵光宙等[5]用模型参考自适应的方法对发电柴油机进行了调速研究,侯馨光等[6]设计了自适应调速系统。但是,上述研究在对控制对象柴油机数学模型上均进行了简化,将其处理为在某一平衡点建立的二阶惯性环节或者二阶惯性加延迟环节,不利于全工况的研究。另外,一方面,1956年Kalman首先提出了自校正控制思想,Astrom等[1]在这基础上设计了最小方差自校正调节器,Clark等[7-8]进一步发展提出广义最小方差自校正控制,这是自校正控制发展的第一阶段;此后,Edmunds等进行了深入的研究工作,开辟了以最优控制思想为主导的自校正调节器历史时期;目前,该领域进入了基于神经网络、模糊控制等理论的智能自校正控制器阶段。由于神经网络可以在指定的紧集上以任意精度逼近解析非线性函数,可以此来补偿标称模型与实际被控对象之间的误差,提高系统的性能,因此,神经网络等智能控制方法与传统自校正控制相结合在解决非线性系统控制问题上发挥出巨大的潜力。为解决恶劣海况下船舶柴油机转速波动过大引起的增压器喘振问题提供理论参考,本文作者在船舶柴油主推进装置建模的基础上,尝试将神经网络与广义最小方差自校正控制算法引入到船舶柴油主机控制系统中,给出仿真结果并加以分析。
1 船舶柴油主推进装置的建模与仿真
船舶柴油推进装置计算框图[9]如图1所示。整个推进装置数学模型由柴油主机和螺旋桨构成,将柴油机分为气缸、扫气箱、排气管以及延迟模块,忽略了空气压缩机、空气冷却器等环节。
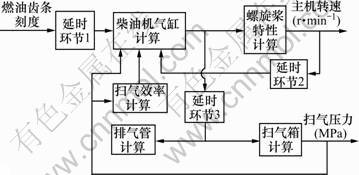
图1 船舶柴油推进装置计算框图
Fig.1 Marine diesel propulsion plant calculation diagram
1.1 螺旋桨推力和转矩计算
本文在螺旋桨的推力和转矩计算中采用文献[2]中的回归计算方法,满足全工况仿真需要。推力系数 和转矩系数
和转矩系数 计算表达式为:
计算表达式为:
 (1)
(1)
 (2)
(2)
其中:β表达式见文献[2]。螺旋桨的有效推力Tprop和负载转矩Mprop计算表达式为:
 (3)
(3)
 (4)
(4)
式中:ρ为海水密度;t为推力减额系数;va为螺旋桨进速;n为主机转速;k,K1和K2为随航行条件变化而变化的系数。
1.2 船―机―桨动态数学模型
船舶运动的微分方程为:
 (5)
(5)
其中:mship为船舶质量;mw为船体附连水质量;vs为船速;Tprop为螺旋桨有效推力;Rship为船舶阻力。
考虑机械摩擦,柴油机转速的微分方程为:
 (6)
(6)
式中:I为转动惯量;Mshaft为柴油机的输出转矩;Mprop为负载转矩;Mfric为柴油机与轴系因机械摩擦而损失的转矩。
船舶柴油机准稳态数学模型仿真计算方法见文献[2]。
1.3 仿真验证
为验证上述建模方法的正确性,选择中远集团当前较先进的5446ETU船舶作为仿真对象。该型号船舶装备MAN B&W型号主机和定距桨。具体技术参 数[10]见表1和表2。
图2所示是MAN B&W 10L90 MC船舶柴油机自起动开始至燃油齿条刻度从127到90再推到127时相关参数的动态仿真曲线。由图2可以看出:燃油齿条刻度减小引起主机转速、输出转矩、螺旋桨负荷转矩、扫气压力、排气压力随之下降,而喷油量减小瞬间由于增压器的变化滞后于柴油机的变化,燃烧室内空气不会急剧减小,造成了空气燃油质量比反而增加现象。仿真数据与台架试验相比,最大误差不超过12%,因此,本节建立的动态仿真模型是可信的。
表1 MAN B&W10L90MC柴油柴油机技术参数
Table 1 Technical parameters of MAN B&W 10L90MC diesel engine
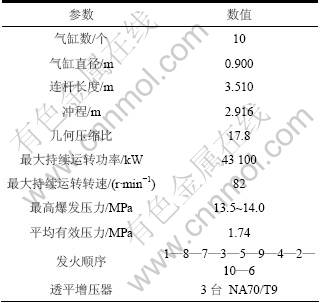
表2 螺旋桨技术参数
Table 2 Technical parameters of the propeller

2 基于BP神经网络的广义最小方差控制器
根据文献[11],在最小方差神经控制的基础上结合船舶动力装置工程背景,给出控制算法原理框图,如图3所示。广义最小方差控制见相关文献。图3中,被控对象的实际输出为y,由于实际被控对象存在非线性不确定性,参数估计模型的输出 与y不一致,NNI神经网络用于补偿该误差;在广义最小方差控制后增加NNC神经网络的输出作为补偿控制项?u,目的是补偿被控对象非线不确定项的影响。其中:
与y不一致,NNI神经网络用于补偿该误差;在广义最小方差控制后增加NNC神经网络的输出作为补偿控制项?u,目的是补偿被控对象非线不确定项的影响。其中:
 (7)
(7)
本文选择NNI和NNC均为3层BP神经网络,设计为 型网络(n<r),输入层含有n个节点,对应于网络的n个输入;隐含层含有r个节点;输出层有1个节点,对应于网络的1个输出。输入层第i个节点(1≤i≤n)到隐含层节点第j个节点(1≤j≤r)间的权值记为wij;隐含层第j个节点(1≤j≤r)到输出层的节点间的权值记为vj;输出层的输出记为Out。
型网络(n<r),输入层含有n个节点,对应于网络的n个输入;隐含层含有r个节点;输出层有1个节点,对应于网络的1个输出。输入层第i个节点(1≤i≤n)到隐含层节点第j个节点(1≤j≤r)间的权值记为wij;隐含层第j个节点(1≤j≤r)到输出层的节点间的权值记为vj;输出层的输出记为Out。
NNI网络与NNC网络用上角标I和C区分。
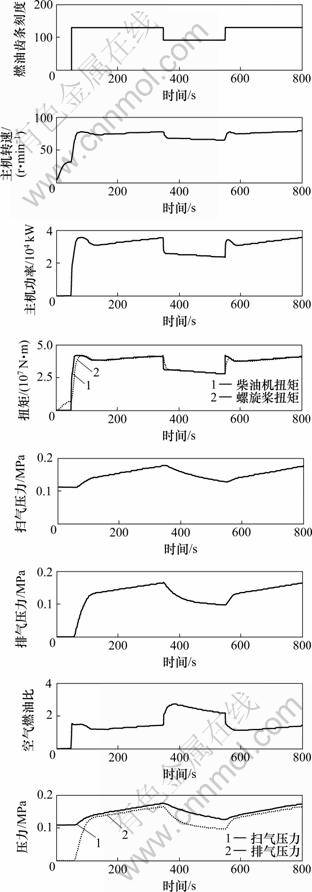
图2 船舶柴油机动态仿真曲线
Fig.2 Dynamic simulation curves of marine diesel

图3 控制算法原理框图
Fig.3 Block diagram of control algorithm
2.1 基于BP神经网络的辨识器
NNI的输入:

 (8)
(8)
NNI的输出:
 (9)
(9)
选择误差函数:
 (10)
(10)
NNI网络隐含层与输出层之间的权值调整推导如下:

 (11)
(11)
NNI网络输入层与隐含层之间的权值调整推导如下:

 (12)
(12)
于是,得到NNI网络的权值调整式子:
 (13)
(13)

 (14)
(14)
2.2 基于BP神经网络的补偿器
NNC的输入:
 (15)
(15)
NNC的输出:
 (16)
(16)
神经网络的训练指标是系统的输出与设定输出之间的误差的平方和最小,选择误差函数:
 (17)
(17)
NNC网络输入层与隐含层之间的权值调整推导如下:

 (18)
(18)

 (19)
(19)


 (20)
(20)


 (21)
(21)
于是,得到NNC网络的权值调整式子:

 (22)
(22)

(23)
3 仿真研究
考虑第二部分介绍的被控对象5446ETU大型集装箱船舶柴油推进装置。该系统存在非线性且数学模型参数未知,实际被控对象用第二部分建立的数学模型代替,然后进行控制规律的设计。仿真中忽略了实际船舶中负荷程序等限制环节。
(1) 风浪为0级,主机起动后,设定转速从75 r/min调至55 r/min再至75 r/min,在常规PID与基于BP神经网络的智能广义最小方差控制2种控制策略下主机转速及燃油齿条刻度对比曲线如图4所示。PID控制器采用PI控制算法,比例增益系数为0.9,积分时间常数为1.2[2];NNI为4×6×1型、NNC为2×10×1型网络,权值初值选择(0,0.01)中的随机数。主机转速及燃油齿条刻度仿真曲线见图4。
由图4可以看出:基于BP神经网络的智能广义最小方差控制与常规PID相比,上升时间短,超调小,能更快地跟踪给定值,经过一定时间神经网络学习和权值调整后,控制量达到稳定。误差变化曲线如图5所示。但是,在设定转速变化的一段时间内,控制量燃油齿条刻度变化较大,甚至达到最大值(或最小值),存在抖动。结果表明,该控制策略在风浪较小的海况下调速控制效果不尽理想,不符合实际工程需要,要尽量克服和避免。
(2) 风浪为9级,设定转速为75 r/min。其中,PID控制算法中比例增益系数为0.7,积分时间常数为4.2,微分时间常数为0.1[2]。仿真曲线如图6和图7所示。时跟踪设定转速;而采用含有BP神经网络的智能广义最小方差控制算法经过输入信号及导师信号的不断学习与自校正,柴油机的转速波动小,具有很强的跟踪能力和抗干扰能力,但是,齿条刻度动作幅度与常规PID的相比偏大。
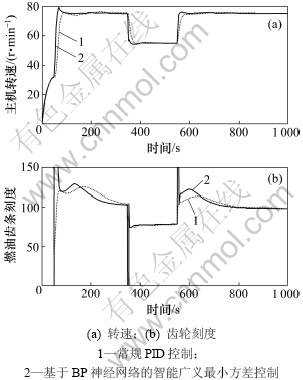
图4 主机转速及燃油齿条刻度仿真曲线
Fig.4 Simulation results of engine speed and fuel index

图5 误差变化曲线
Fig.5 Error curves
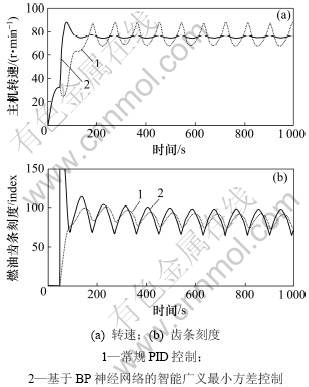
图6 大风浪天主机转速及燃油齿条刻度仿真曲线
Fig.6 Simulation results of engine speed and fuel index at rough sea
由图6和图7可以看出:在风浪为9级的条件下,采用常规PID控制算法,柴油机转速波动大,不能实
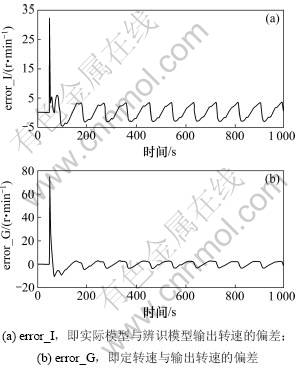
图7 大风浪天误差变化曲线
Fig.7 Error curves at rough sea
4 结论
(1) 在建立数学模型的基础上,针对被控对象非线性不确定性,设计了基于BP神经网络的辨识器和补偿器,最后将智能广义最小方差控制理论引入到船舶柴油主机调速控制中,并进行了仿真研究。
(2) 本方法有助于解决在恶劣海况下螺旋桨浮出水面造成的推进系统转速大幅波动而出现增压器喘振的问题,为在船舶推进系统中应用基于神经网络的智能控制器提供了有效仿真实例。
参考文献:
[1] Astrom K J, Wittenmark B. On self-tuning regulator[J]. Automatic, 1973, 9(2): 185-199.
[2] 孙建波. 船舶柴油主推进装置及其控制系统的建模与仿真研究[D]. 大连: 大连海事大学轮机工程学院, 2007: 14-15.
SUN Jian-bo. The modeling and simulation of marine main diesel propulsion plant and its control system[D]. Dalian: Dalian Maritime University. Marine Engineering College, 2007: 14-15.
[3] 杨杨. 新型船舶柴油主推进遥控仿真系统的研究[D]. 大连: 大连海事大学信息科学技术学院, 2010: 2-3.
YANG Yang. Research on a novel simulation system for marine main diesel propulsion remote control[D]. Dalian: Dalian Maritime University. Information Science and Technology College, 2010: 2-3.
[4] 王芝秋, 陆平, 张志华, 等. 采用动稳态模式分离PID调速算法进一步改进柴油机调速性能[J]. 内燃机工程,1993, 14(1), 57-60.
WANG Zhi-qiu, LU Ping, ZHANG Zhi-hua, et al. An approach on improvement of governing performance with two-mode PID algorithm[J]. Chinese Internal Combustion Engine Engineering, 1993, 14(1): 57-60.
[5] 赵光宙, 高军, 杨志家. 柴油机模型参考自适应调速系统的研究[J]. 内燃机工程, 1995, 16(4): 26-34.
ZHAO Guang-zhou, GAO Jun, YANG Zhi-jia. Research on model-reference adaptive speed control for diesel engine[J]. Chinese Internal Combustion Engine Engineering, 1995, 16(4): 26-34.
[6] 侯馨光, 林雪芳. 船舶主柴油机自适应调速系统计算机仿真[J]. 交通部上海船舶运输科学研究所学报, 1986, 18(2): 79-90.
HOU Xing-guang, LIN Xue-fang. Computer simulation of the adaptive regulation system designed for the speed control of marine propulsion diesel engine[J]. Journal of Shanghai Scientific Research Institute of Shipping, 1986, 18(2): 79-90.
[7] Clark D W, Gawthrop P J. Self-tuning controller[J]. Proceedings IEE, 1975, 122(9): 929-934.
[8] Clark D W, Gawthrop P J. Self-tuning control[J]. Proceedings IEE, 1979, 126(9): 633-640.
[9] Hendricks E, Blanke M, Andersen J S. On modelling large two-stroke diesel engines: Simulation and model evaluation[R]. Demark: Technical University of Denmark, 1984: 5-59.
[10] Technical Literature of 5250TEU[R]. Internal Report, 2002.
[11] 牛玉刚, 杨成梧, 赵建丛. 一类非线性不确定系统的最小方差神经控制[J]. 控制与决策, 2003, 15(4): 465-468.
NIU Yu-gang, YANG Cheng-wu, ZHAO Jian-cong. Minimum variance neural control for a class of nolinear system with uncertaintiese[J]. Control and Decision, 2000, 15(4): 465-468.
(编辑 陈灿华)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(61074053)
通信作者:郭晨(1956-),男,江苏如东人,教授,博士生导师,从事智能控制、船舶系统智能化研究;E-mail: guoc@dlmu.edu.cn

