精密运动平台线性自抗扰控制
陈兴林,刘川,武志鹏
(哈尔滨工业大学 航天学院,黑龙江 哈尔滨,150001)
摘要:基于高动态精密伺服运动平台系统模型提出一种线性自抗扰控制方法。该方法的控制器通过扩张状态观测器观测系统的动态变化,补偿系统中的未建模动态和各种扰动,为减小系统的动态跟踪误差,再运用前馈对系统的跟踪误差进行补偿。在此复合控制方式下,控制器实现自抗扰控制,前馈控制器很好地补偿误差,解决一般反馈控制系统在提高控制精度与确保系统稳定性之间存在的矛盾。实验结果表明:提出的线性自抗扰控制方法改善高动态精密伺服运动平台系统的动态性能和抗干扰能力,提高系统的定位精度。
关键词:自抗扰;前馈补偿;高动态精密伺服
中图分类号:TP273+.3 文献标志码:A 文章编号:1672-7207(2013)08-3210-06
Linear active disturbance rejection control used in precision motion platform
CHEN Xinlin, LIU Chuan, WU Zhipeng
(School of Astronautics, Harbin Institute of Technology, Harbin 150001, China)
Abstract: A linear active disturbance rejection controller design for high dynamic precision servo system was presented. The controller is designed through an extended state observer to estimate the system’s state and compensate the variant dynamics of the system, the external disturbance, and other uncertainties. To improve the tracking performance of the dynamic system, the tracking error is added to the reference input and used as feed-forward error compensation. Under such a combined control method, the controller has the ability of active disturbance rejection, and the feed-forward error compensation controller compensates tracking error well, which makes a very good solution to the contradiction between the improving control accuracy and ensuring system stability in the general feedback control system. The experiments show that the linear active disturbance rejection controller design can improve the dynamic performance and the anti-jamming capability of the high dynamic precision servo system, and enhance the control precision.
Key words: active disturbance rejection; feed-forward compensation; high dynamic precision servo
高动态精密伺服运动平台是光刻机的重要部件,它要求在高速运动的情况下,在较短的行程内实现对平台的精确定位与跟踪。以ASML已经商用的最先进光刻机Twinscan XT 1950i机型为例,工作时最高速度大于0.5 m/s,加速度大于10 m/s2,行程小于1 m,定位精度在几纳米左右。因此,选择一种能够抗击干扰,准确控制平台运动的控制算法显得尤为重要。自抗扰控制(ADRC)[1]发挥了传统PID控制的优点,而且不依赖于被控对象精确的数学模型,在未知不确定扰动作用下,对系统的扰动进行估计并给予补偿,具有较强的鲁棒性,近年来在很多的实物实验中都取得了理想的控制效果。Su等[2-9]将自抗扰控制技术应用到电力电子与电力传动以及其他领域,都获得了很好的控制效果。本文将ADRC运用到精密平台的控制中,首先建立平台控制模型,轨迹规划为五阶S曲线,其次给出了具体的线性自抗扰控制算法,为减小系统的动态跟踪误差,再运用前馈对系统的跟踪误差进行补偿,最后通过实验验证了该方法的有效性。
1 控制模型
本文研究的精密工作台中,平台由气浮导轨导向,由直线电机驱动。用激光干涉仪检测运动平台与基础框架之间的位移y。考虑平台中各质量块连接刚度足够,建立等效模型如图1所示。其中,m为运动平台质量;F为直线电机力输入;c为阻尼系数。因为系统由气浮导轨支撑,所以运动平台与基础框架之间的刚度k可以忽略不计。
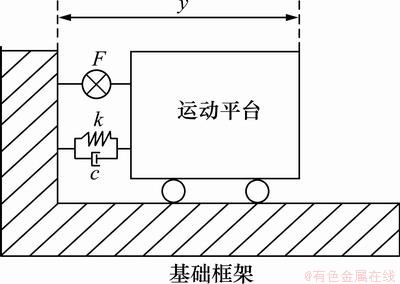
图1 运动平台机械模型
Fig. 1 Mechanical model of moving platform
短行程直流直线电机因为其结构和负载形式的不同,其数学模型差别较大[10-12],结合直线电机的结构和负载形式,建立了其数学模型:
 (1)
(1)
 (2)
(2)
式中:Fd为运动平台的推力扰动;km为直线电机的力常数;i(t)为直线电机线圈回路中的电流。
 (3)
(3)
式中:U(t)为加在直线电机动子线圈两边的电压;E为线圈移动时产生的反电势;R为线圈回路电阻;L为线圈回路电感。
 (4)
(4)
式中:ke为和速度有关的反电动势系数。

 (5)
(5)
2 轨迹规划
为达到高精度点对点轨迹规划,采用五阶S曲线轨迹。相比低阶轨迹,五阶轨迹的轨迹轮廓更光滑,对基础框架冲击更小,对系统造成的振动更少,达到的位置精度更高。图2所示为一种典型的五阶S曲线轨迹。x为运动距离,v为速度,a为加速度,j,d和dd以此类推。如果改变给定的约束条件,轨迹最大加速度ta时间段、轨迹最大加加速度tj时间段、轨迹最大加加加速度td时间段、轨迹最大加加加速度斜率 时间段都可能不存在,因此轨迹规划存在很多种可能情形。各时间段计算公式如下:
时间段都可能不存在,因此轨迹规划存在很多种可能情形。各时间段计算公式如下:


 (6)
(6)
式中:d0,j0,a0,v0,x0为初始边界条件;t为时间。x=0.075 m,vmax=0.3 m/s,amax=10 m/s2,jmax=666.7 m/s2,dmax=1.667×105 m/s4,ddmax=1.667×108 m/s5。
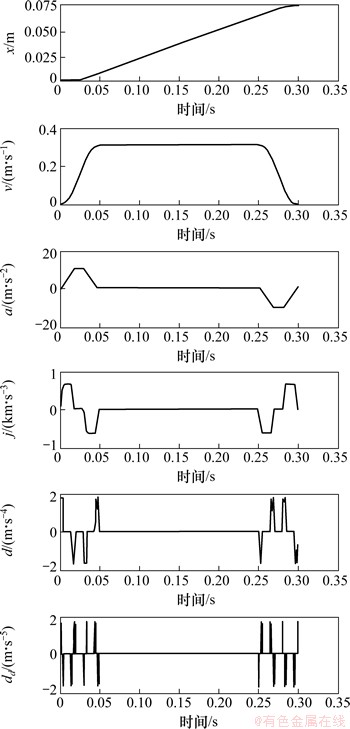
图2 五阶点对点运动轨迹
Fig. 2 Fifth-order trajectory planning
3 控制系统设计
自抗扰控制器一般由微分-跟踪器(TD)、扩张状态观测器(ESO)和非线性组合(N-PD)3个部分组成[13]。微分-跟踪器用来跟踪系统输入信号,并给出准确的微分信号;扩张状态观测器用来对系统的状态和扰动进行估计;非线性组合获得控制量,并对扰动进行补偿。和传统的自抗扰控制器相比,本文设计的控制器没有微分-跟踪器(TD),一个原因是台体的运动轨迹是五阶S曲线,已经完全规划好,其微分信号容易获得;另一个原因是微分-跟踪器的算法尽管运行很快,但依然会引起轨迹时间上的延迟,带来误差。本文设计的自抗扰控制器框图见图3。
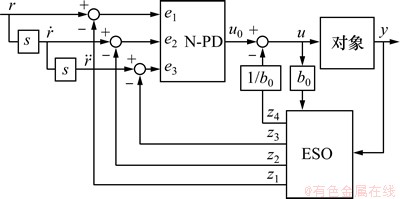
图3 自抗扰控制器框图
Fig. 3 Architecture of ADRC
由式(5)可知控制对象为三阶控制系统,要对其进行观测,要用四阶的状态观测器,四阶的ESO离散表达式为:
 (7)
(7)
式中:ε0为ESO观测到的误差;k为采集点数,z1,z2,z3,z4为ESO输出;h为步长;β1,β2,β3,β4为ESO控制参数,其计算式[14-15]为:
 (8)
(8)
其中:ω0记为ESO的带宽,并由极点配置得到。状态观测器的观测速度越快,系统中的扰动就越容易被观测到,控制器就能及时地补偿这部分干扰,但是,状态观测器观测速度过快,会引入传感器的高频噪声,而且采样频率也限制了观测器的速度。因此,ω0的引入成为必要。
状态观测器设计为4阶,控制器设计为:
 (9)
(9)
式中:u为控制量;r, ,
, 分别为输入参考位移信号,速度信号和加速度信号;b0为补偿因子;kp,kd1,kd2为误差增益,其计算式[14-15]如下:
分别为输入参考位移信号,速度信号和加速度信号;b0为补偿因子;kp,kd1,kd2为误差增益,其计算式[14-15]如下:
 (10)
(10)
其中:ωc为系统闭环带宽,ω0=(3~5)ωc [15]。带宽越宽,通过的高频成分多,输出的复现精度就越高,控制系统的性能就越好。但是,带宽过高,会引入传感器的高频噪声,而且还会引起机械的谐振。因此,ωc的确定采用文献[15]的方法,这样的参数法设计方法,使设计得到简化。
为了分析系统在频域的性能,将系统连续化,进行拉普拉斯变换[1],并化简为单位反馈形式,控制框图如图4所示。
 (11)
(11)

 (12)
(12)
在图4中,Gr(s)为含有自抗扰的等效输入信号传递函数,Gc(s)为含有自抗扰的等效开环传递函数,Gp(s)为控制对象的传递函数。
 (13)
(13)
 (14)
(14)
其中:
 (15)
(15)
 (16)
(16)
 (17)
(17)
 (18)
(18)
 (19)
(19)
 (20)
(20)
 (21)
(21)
 (22)
(22)
 (23)
(23)
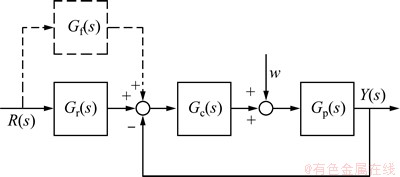
图4 复合控制系统框图
Fig. 4 Block diagram of combined control method
系统的误差为:

 (24)
(24)
当加上前馈Gr(s)后,


 (25)
(25)
要使 最小,即=0,则
最小,即=0,则
 (26)
(26)
这说明加上前馈控制之后,在式(26)成立的条件下,很好地补偿了系统误差,恒有=0,实现了对输入信号的误差全补偿,提高了系统的控制精度。从控制系统稳定性的角度来看,没有前馈控制时的反馈控制系统的特征方程,与有前馈控制时的复合控制系统的特征方程完全一致,表明系统的稳定性与前馈控制无关。因此,此复合控制系统也很好地解决了一般反馈控制系统在提高控制精度与确保系统稳定性之间存在的矛盾。
4 实验
图5所示为实验系统。精密运动平台电机采用线性无刷直线伺服电机BLMC-192-A,行程为200 mm,母线最高电压320 V(DC),光栅尺定位精度±0.2 μm,运动平台质量m为9 kg。反电动势常数ke为26.89 V/(m・s-1),力常数km为33.09 N/A,25 ℃时电阻R为6.4 Ω,电感值L为1.9 mH,将以上参数代入式(5),得到控制对象的传递函数。取b0=4,ωc=75 Hz,ω0=300 Hz,代入式(8)和式(10),得出其他控制参数。
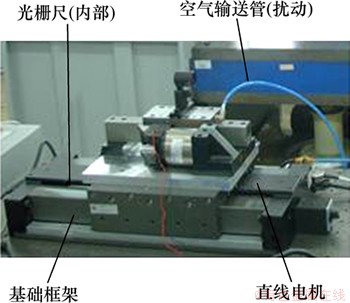
图5 实验系统实物像
Fig. 5 Photograph of experimental system
图6所示为实验跟踪的五阶S曲线,PID和ADRC分别对这条五阶S曲线进行跟踪。轨迹x=0.01 m,vmax=0.5 m/s,amax=10 m/s2,jmax=666.7 m/s3,dmax=1.667×105 m/s4,ddmax=1.667×108 m/s5。
图7所示为PID控制下的跟踪误差曲线。PID控制器因为没有状态观测器和前馈补偿,在加速阶段,误差较大,最大误差为0.12 mm;在匀速阶段,在系统阻尼的作用下,振荡的振幅逐渐减小,误差逐渐减少,最后趋于稳定。
图8所示为ADRC控制下的轨迹误差曲线。因为有状态观测器观测系统动态变化和补偿系统中的未知扰动,又用前馈补偿了系统误差,在加速阶段,最大误差为14 μm,误差明显变小;在匀速阶段,误差恒在一个范围之内,最大误差4 μm。
对比图7和图8可见,ADRC控制的系统误差明显要比PID控制的系统误差要小,系统达到的精度更高,验证了该方法的有效性。
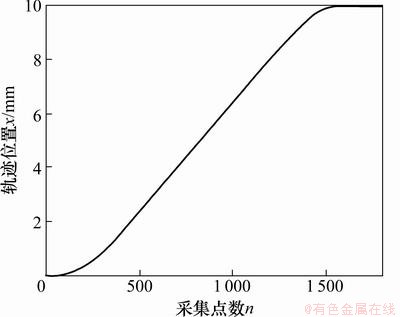
图6 实验跟踪的五阶S曲线
Fig. 6 Fifth-order S-curve of the experimental track
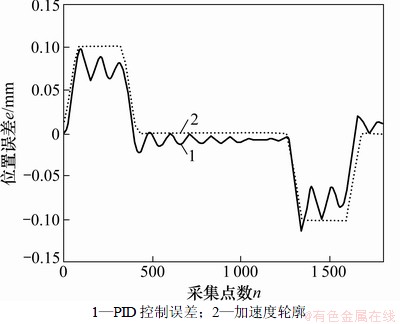
图7 PID控制下的轨迹误差曲线
Fig. 7 Trajectory error curve of PID controller
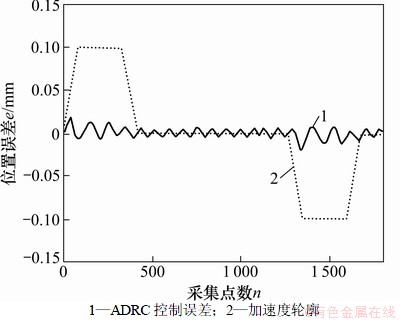
图8 ADRC控制下的轨迹误差曲线
Fig. 8 Trajectory error curve of ADRC controller
5 结论
(1) 通过对自抗扰控制器的线性化,并采用前馈补偿控制,改善了高动态精密伺服运动平台系统的动态性能和抗干扰能力,提高了系统的跟踪性能和定位精度。
(2) 将带宽作为线性自抗扰控制器控制性能的唯一调试参数,简化了计算,便于整定。
(3) 线性自抗扰控制器不依赖系统精确模型,能有效地观测系统状态变化,实时估计出系统未建模动态和不确定扰动,对系统中存在的扰动进行补偿,有效地消除扰动对系统的影响。
(4) 此线性自抗扰控制和前馈补偿控制相结合的复合控制方法可作为一种新方法在工程上推广应用。
参考文献:
[1] Han J. From PID to auto disturbances rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[2] Su Y, Duan Y, Zheng C, et al. Disturbance-rejection high-precision motion control of a Stewart platform[J]. IEEE Transactions on Control Systems and Technology, 2004, 12(3): 364-374.
[3] Su Y, Zheng C, Duan B. Automatic disturbances rejection controller for precise motion control of permanent-magnet synchronous motors[J]. IEEE Transactions on Industrial Electronics. 2005, 52(3): 814-823.
[4] Sun D, Comments on active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2007, 54(6): 3428-3429.
[5] Wu D, Chen K. Design and analysis of precision active disturbance rejection control for noncircular turning process[J]. IEEE Transactions on Industrial Electronics, 2009, 56(7): 2746-2753.
[6] Wu D, Chen K, Wang X. Tracking control and active disturbance rejection with application to noncircular machining[J]. International Journal of Machine Tools&Manufacture, 2007, 47(15): 2207-2217.
[7] She J, Fang M, Ohyama Y, et al. Improving disturbance-rejection performance based on an equivalent input-disturbance approach[J]. IEEE Transactions on Industrial Electronics, 2008, 55(1): 380-389.
[8] She J, Xin X, Pan Y. Equivalent-input-disturbance approach―Analysis and application to disturbance rejection in dual-stage feed drive control system[J]. IEEE/ASME Transactions on Mechatronics, 2011, 16(2): 330-340.
[9] She J, Ohyama Y, Nakano M. A new approach to the estimation and rejection of disturbances in servo systems[J]. IEEE Transactions on Control Systems Technology, 2005, 13(3): 378-385.
[10] 陈幼平, 杜志强, 艾武, 等. 一种短行程直线电机的数学模型及其实验研究[J]. 中国电机工程学报, 2005, 25(7): 131-136.
CHEN Youping, DU Zhiqiang, AI Wu, et al. Research on model of a new short-stroke liner motor and its experiments[J]. Proceeding of the CSEE, 2005, 25(7): 131-136.
[11] Pompermaier C, Jorge Haddad K F, Zambonetti A, et al. Small linear PM oscillatory motor: magnetic circuit modeling corrected by axisymmetric 2-D FEM and experimental characterization[J]. IEEE Transactions on Industrial Electronics, 2012, 59(3): 1389-1396.
[12] Smithmaitrie P, Suybangdum P, Laoratanakul P, et al. Design and performance testing of an ultrasonic linear motor with dual piezoelectric actuators[J]. IEEE Transactions on Ultrasonic, Ferroelectrics, and Frequency Control, 2012, 59(5): 1033-1042.
[13] 刘子建, 吴敏, 王一军. 基于自抗扰控制技术的高压大功率异步电机直接转矩控制系统[J]. 中南大学学报: 自然科学版, 2011, 42(11): 3392-3398.
LIU Zijian, WU Min, WANG Yijun. Direct torque control system of high-voltage high-power asynchronous machine based on active disturbance rejection control technique[J]. Journal of Central South University: Science and Technology, 2011, 42(11): 3392-3398.
[14] Gao Z. Active disturbance rejection control: a paradigm shift in feedback control system design[C]//Proceedings of the 2006 American Control Conference. Minneapolis: IEEE, 2006: 2399-2405.
[15] Gao Z. Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the American Control Conference. Denver: IEEE, 2003: 4989-4996.
(编辑 陈爱华)
收稿日期:2012-10-06;修回日期:2012-12-23
基金项目:国家科技重大专项资助项目(2009ZX02207)
通信作者:刘川(1982-),男,四川资阳人,博士研究生,从事光刻机双工件台控制系统设计研究;电话:13946039547;E-mail:liuchuan1226@126.com

