
�����˶�ƽ̨�����Կ��ſ���
�����֣���������־��
(��������ҵ��ѧ ����ѧԺ�������� ��������150001)
ժ Ҫ��
�ŷ��˶�ƽ̨ϵͳģ�����һ�������Կ��ſ��Ʒ������÷����Ŀ�����ͨ������״̬�۲����۲�ϵͳ�Ķ�̬�仯������ϵͳ�е�δ��ģ��̬�����Ŷ���Ϊ��Сϵͳ�Ķ�̬������������ǰ����ϵͳ�ĸ��������в������ڴ˸��Ͽ��Ʒ�ʽ�£�������ʵ���Կ��ſ��ƣ�ǰ���������ܺõز��������һ�㷴������ϵͳ����߿��ƾ�����ȷ��ϵͳ�ȶ���֮����ڵ�ì�ܡ�ʵ��������������������Կ��ſ��Ʒ������Ƹ߶�̬�����ŷ��˶�ƽ̨ϵͳ�Ķ�̬���ܺͿ��������������ϵͳ�Ķ�λ���ȡ�
�ؼ��ʣ�
�Կ�����ǰ���������߶�̬�����ŷ���
��ͼ����ţ�TP273+.3 ���ױ�־�룺A ���±�ţ�1672-7207(2013)08-3210-06
Linear active disturbance rejection control used in precision motion platform
CHEN Xinlin, LIU Chuan, WU Zhipeng
(School of Astronautics, Harbin Institute of Technology, Harbin 150001, China)
Abstract: A linear active disturbance rejection controller design for high dynamic precision servo system was presented. The controller is designed through an extended state observer to estimate the system��s state and compensate the variant dynamics of the system, the external disturbance, and other uncertainties. To improve the tracking performance of the dynamic system, the tracking error is added to the reference input and used as feed-forward error compensation. Under such a combined control method, the controller has the ability of active disturbance rejection, and the feed-forward error compensation controller compensates tracking error well, which makes a very good solution to the contradiction between the improving control accuracy and ensuring system stability in the general feedback control system. The experiments show that the linear active disturbance rejection controller design can improve the dynamic performance and the anti-jamming capability of the high dynamic precision servo system, and enhance the control precision.
Key words: active disturbance rejection; feed-forward compensation; high dynamic precision servo
�߶�̬�����ŷ��˶�ƽ̨�ǹ�̻�����Ҫ��������Ҫ���ڸ����˶�������£��ڽ϶̵��г���ʵ�ֶ�ƽ̨�ľ�ȷ��λ����١���ASML�Ѿ����õ����Ƚ���̻�Twinscan XT 1950i����Ϊ��������ʱ����ٶȴ���0.5 m/s�����ٶȴ���10 m/s2���г�С��1 m����λ�����ڼ��������ҡ���ˣ�ѡ��һ���ܹ��������ţ�ȷ����ƽ̨�˶��Ŀ����㷨�Ե���Ϊ��Ҫ���Կ��ſ���(ADRC)[1]�����˴�ͳPID���Ƶ��ŵ㣬���Ҳ������ڱ��ض���ȷ����ѧģ�ͣ���δ֪��ȷ���Ŷ������£���ϵͳ���Ŷ����й��Ʋ����貹�������н�ǿ��³���ԣ��������ںܶ��ʵ��ʵ���ж�ȡ��������Ŀ���Ч����Su��[2-9]���Կ��ſ��Ƽ���Ӧ�õ�������������������Լ�������������˺ܺõĿ���Ч�������Ľ�ADRC���õ�����ƽ̨�Ŀ����У����Ƚ���ƽ̨����ģ�ͣ��켣�滮Ϊ���S���ߣ���θ����˾���������Կ��ſ����㷨��Ϊ��Сϵͳ�Ķ�̬������������ǰ����ϵͳ�ĸ��������в��������ͨ��ʵ����֤�˸÷�������Ч�ԡ�
1 ����ģ��
�����о��ľ��ܹ���̨�У�ƽ̨���������쵼����ֱ�ߵ���������ü�������Ǽ���˶�ƽ̨��������֮���λ��y������ƽ̨�и����������Ӹն��㹻��������Чģ����ͼ1��ʾ�����У�mΪ�˶�ƽ̨������FΪֱ�ߵ�������룻cΪ����ϵ������Ϊϵͳ����������֧�ţ������˶�ƽ̨��������֮��ĸն�k���Ժ��Բ��ơ�
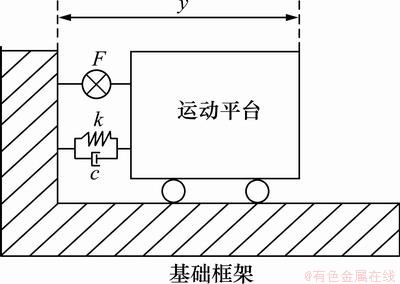
ͼ1 �˶�ƽ̨��еģ��
Fig. 1 Mechanical model of moving platform
���г�ֱ��ֱ�ߵ����Ϊ��ṹ������ʽ�IJ�ͬ������ѧģ�Ͳ��ϴ�[10-12]�����ֱ�ߵ���Ľṹ������ʽ������������ѧģ�ͣ�
 (1)
(1)
 (2)
(2)
ʽ�У�FdΪ�˶�ƽ̨�������Ŷ���kmΪֱ�ߵ������������i(t)Ϊֱ�ߵ����Ȧ��·�еĵ�����
 (3)
(3)
ʽ�У�U(t)Ϊ����ֱ�ߵ��������Ȧ���ߵĵ�ѹ��EΪ��Ȧ�ƶ�ʱ�����ķ����ƣ�RΪ��Ȧ��·���裻LΪ��Ȧ��·��С�
 (4)
(4)
ʽ�У�keΪ���ٶ��йصķ��綯��ϵ����

 (5)
(5)
2 �켣�滮
Ϊ�ﵽ�߾��ȵ�Ե�켣�滮���������S���߹켣����ȵͽ켣����켣�Ĺ켣�������⻬���Ի�����ܳ����С����ϵͳ��ɵ����٣��ﵽ��λ�þ��ȸ��ߡ�ͼ2��ʾΪһ�ֵ��͵����S���߹켣��xΪ�˶����룬vΪ�ٶȣ�aΪ���ٶȣ�j��d��dd�Դ����ơ�����ı������Լ���������켣�����ٶ�taʱ��Ρ��켣���Ӽ��ٶ�tjʱ��Ρ��켣���ӼӼ��ٶ�tdʱ��Ρ��켣���ӼӼ��ٶ�б�� ʱ��ζ����ܲ����ڣ���˹켣�滮���ںܶ��ֿ������Ρ���ʱ��μ��㹫ʽ���£�
ʱ��ζ����ܲ����ڣ���˹켣�滮���ںܶ��ֿ������Ρ���ʱ��μ��㹫ʽ���£�


 (6)
(6)
ʽ�У�d0��j0��a0��v0��x0Ϊ��ʼ�߽�������tΪʱ�䡣x=0.075 m��vmax=0.3 m/s��amax=10 m/s2��jmax=666.7 m/s2��dmax=1.667��105 m/s4��ddmax=1.667��108 m/s5��
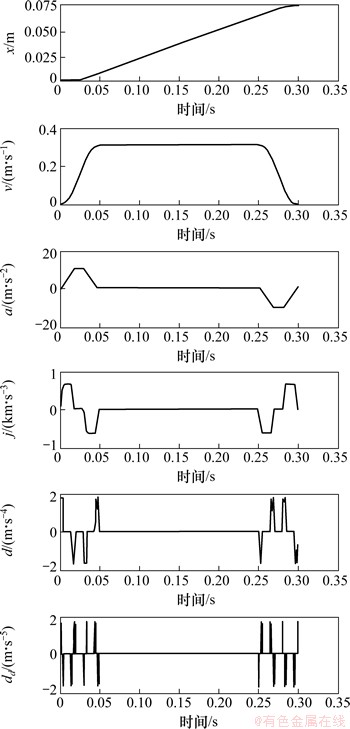
ͼ2 ���Ե��˶��켣
Fig. 2 Fifth-order trajectory planning
3 ����ϵͳ���
�Կ��ſ�����һ������-������(TD)������״̬�۲���(ESO)�ͷ��������(N-PD)3���������[13]����-��������������ϵͳ�����źţ�������ȷ�����źţ�����״̬�۲���������ϵͳ��״̬���Ŷ����й��ƣ���������ϻ�ÿ������������Ŷ����в������ʹ�ͳ���Կ��ſ�������ȣ�������ƵĿ�����û����-������(TD)��һ��ԭ����̨����˶��켣�����S���ߣ��Ѿ���ȫ�滮�ã������ź�����ã���һ��ԭ������-���������㷨�������кܿ죬����Ȼ������켣ʱ���ϵ��ӳ٣�������������Ƶ��Կ��ſ�������ͼ��ͼ3��
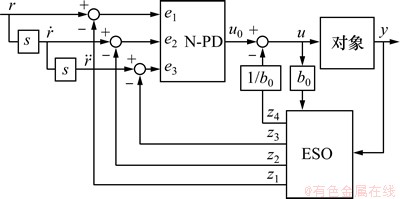
ͼ3 �Կ��ſ�������ͼ
Fig. 3 Architecture of ADRC
��ʽ(5)��֪���ƶ���Ϊ������ϵͳ��Ҫ������й۲⣬Ҫ���Ľ�״̬�۲������Ľ�ESO��ɢ����ʽΪ��
 (7)
(7)
ʽ�У���0ΪESO�۲����kΪ�ɼ�������z1��z2��z3��z4ΪESO�����hΪ��������1����2����3����4ΪESO���Ʋ����������ʽ[14-15]Ϊ��
 (8)
(8)
���У���0��ΪESO�Ĵ��������ɼ������õõ���״̬�۲����Ĺ۲��ٶ�Խ�죬ϵͳ�е��Ŷ���Խ���ױ��۲�����������ܼ�ʱ�ز����ⲿ�ָ��ţ����ǣ�״̬�۲����۲��ٶȹ��죬�����봫�����ĸ�Ƶ���������Ҳ���Ƶ��Ҳ�����˹۲������ٶȡ���ˣ���0�������Ϊ��Ҫ��
״̬�۲������Ϊ4�ף����������Ϊ��
 (9)
(9)
ʽ�У�uΪ��������r�� ��
�� �ֱ�Ϊ����ο�λ���źţ��ٶ��źźͼ��ٶ��źţ�b0Ϊ�������ӣ�kp��kd1��kd2Ϊ������棬�����ʽ[14-15]���£�
�ֱ�Ϊ����ο�λ���źţ��ٶ��źźͼ��ٶ��źţ�b0Ϊ�������ӣ�kp��kd1��kd2Ϊ������棬�����ʽ[14-15]���£�
 (10)
(10)
���У���cΪϵͳ�ջ���������0=(3~5)��c [15]������Խ����ͨ���ĸ�Ƶ�ɷֶ࣬����ĸ��־��Ⱦ�Խ�ߣ�����ϵͳ�����ܾ�Խ�á����ǣ��������ߣ������봫�����ĸ�Ƶ���������һ��������е��г����ˣ���c��ȷ����������[15]�ķ����������IJ�������Ʒ�����ʹ��Ƶõ���
Ϊ�˷���ϵͳ��Ƶ������ܣ���ϵͳ������������������˹�任[1]��������Ϊ��λ������ʽ�����ƿ�ͼ��ͼ4��ʾ��
 (11)
(11)

 (12)
(12)
��ͼ4�У�Gr(s)Ϊ�����Կ��ŵĵ�Ч�����źŴ��ݺ�����Gc(s)Ϊ�����Կ��ŵĵ�Ч�������ݺ�����Gp(s)Ϊ���ƶ���Ĵ��ݺ�����
 (13)
(13)
 (14)
(14)
����
 (15)
(15)
 (16)
(16)
 (17)
(17)
 (18)
(18)
 (19)
(19)
 (20)
(20)
 (21)
(21)
 (22)
(22)
 (23)
(23)
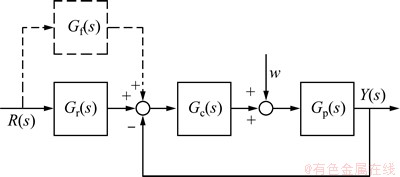
ͼ4 ���Ͽ���ϵͳ��ͼ
Fig. 4 Block diagram of combined control method
ϵͳ�����Ϊ��

 (24)
(24)
������ǰ��Gr(s)��


 (25)
(25)
Ҫʹ ��С����=0����
������=0����
 (26)
(26)
��˵������ǰ������֮����ʽ(26)�����������£��ܺõز�����ϵͳ���������=0��ʵ���˶������źŵ����ȫ�����������ϵͳ�Ŀ��ƾ��ȡ��ӿ���ϵͳ�ȶ��ԵĽǶ�������û��ǰ������ʱ�ķ�������ϵͳ���������̣�����ǰ������ʱ�ĸ��Ͽ���ϵͳ������������ȫһ�£�����ϵͳ���ȶ�����ǰ�������ء���ˣ��˸��Ͽ���ϵͳҲ�ܺõؽ����һ�㷴������ϵͳ����߿��ƾ�����ȷ��ϵͳ�ȶ���֮����ڵ�ì�ܡ�
4 ʵ��
ͼ5��ʾΪʵ��ϵͳ�������˶�ƽ̨�������������ˢֱ���ŷ����BLMC-192-A���г�Ϊ200 mm��ĸ����ߵ�ѹ320 V(DC)����դ�߶�λ���ȡ�0.2 ��m���˶�ƽ̨����mΪ9 kg�����綯�Ƴ���keΪ26.89 V/(m��s-1)��������kmΪ33.09 N/A��25 ��ʱ����RΪ6.4 �������ֵLΪ1.9 mH�������ϲ�������ʽ(5)���õ����ƶ���Ĵ��ݺ�����ȡb0=4����c=75 Hz����0=300 Hz������ʽ(8)��ʽ(10)���ó��������Ʋ�����
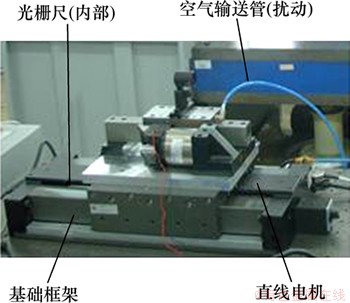
ͼ5 ʵ��ϵͳʵ����
Fig. 5 Photograph of experimental system
ͼ6��ʾΪʵ����ٵ����S���ߣ�PID��ADRC�ֱ���������S���߽��и��١��켣x=0.01 m��vmax=0.5 m/s��amax=10 m/s2��jmax=666.7 m/s3��dmax=1.667��105 m/s4��ddmax=1.667��108 m/s5��
ͼ7��ʾΪPID�����µĸ���������ߡ�PID��������Ϊû��״̬�۲�����ǰ���������ڼ��ٽΣ����ϴ�������Ϊ0.12 mm�������ٽΣ���ϵͳ����������£��������С��������٣���������ȶ���
ͼ8��ʾΪADRC�����µĹ켣������ߡ���Ϊ��״̬�۲����۲�ϵͳ��̬�仯�Ͳ���ϵͳ�е�δ֪�Ŷ�������ǰ��������ϵͳ���ڼ��ٽΣ�������Ϊ14 ��m��������Ա�С�������ٽΣ�������һ����Χ֮�ڣ�������4 ��m��
�Ա�ͼ7��ͼ8�ɼ���ADRC���Ƶ�ϵͳ�������Ҫ��PID���Ƶ�ϵͳ���ҪС��ϵͳ�ﵽ�ľ��ȸ��ߣ���֤�˸÷�������Ч�ԡ�
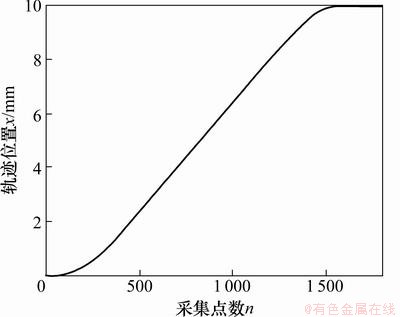
ͼ6 ʵ����ٵ����S����
Fig. 6 Fifth-order S-curve of the experimental track
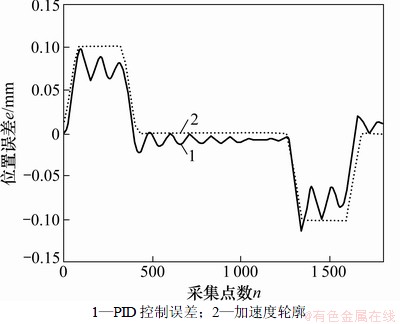
ͼ7 PID�����µĹ켣�������
Fig. 7 Trajectory error curve of PID controller
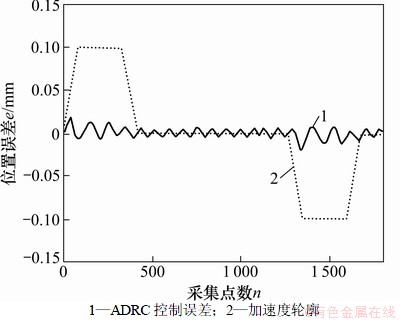
ͼ8 ADRC�����µĹ켣�������
Fig. 8 Trajectory error curve of ADRC controller
5 ����
(1) ͨ�����Կ��ſ����������Ի���������ǰ���������ƣ������˸߶�̬�����ŷ��˶�ƽ̨ϵͳ�Ķ�̬���ܺͿ����������������ϵͳ�ĸ������ܺͶ�λ���ȡ�
(2) ��������Ϊ�����Կ��ſ������������ܵ�Ψһ���Բ��������˼��㣬����������
(3) �����Կ��ſ�����������ϵͳ��ȷģ�ͣ�����Ч�ع۲�ϵͳ״̬�仯��ʵʱ���Ƴ�ϵͳδ��ģ��̬�Ͳ�ȷ���Ŷ�����ϵͳ�д��ڵ��Ŷ����в�������Ч�������Ŷ���ϵͳ��Ӱ�졣
(4) �������Կ��ſ��ƺ�ǰ�������������ϵĸ��Ͽ��Ʒ�������Ϊһ���·����ڹ������ƹ�Ӧ�á�
�ο����ף�
[1] Han J. From PID to auto disturbances rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[2] Su Y, Duan Y, Zheng C, et al. Disturbance-rejection high-precision motion control of a Stewart platform[J]. IEEE Transactions on Control Systems and Technology, 2004, 12(3): 364-374.
[3] Su Y, Zheng C, Duan B. Automatic disturbances rejection controller for precise motion control of permanent-magnet synchronous motors[J]. IEEE Transactions on Industrial Electronics. 2005, 52(3): 814-823.
[4] Sun D, Comments on active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2007, 54(6): 3428-3429.
[5] Wu D, Chen K. Design and analysis of precision active disturbance rejection control for noncircular turning process[J]. IEEE Transactions on Industrial Electronics, 2009, 56(7): 2746-2753.
[6] Wu D, Chen K, Wang X. Tracking control and active disturbance rejection with application to noncircular machining[J]. International Journal of Machine Tools&Manufacture, 2007, 47(15): 2207-2217.
[7] She J, Fang M, Ohyama Y, et al. Improving disturbance-rejection performance based on an equivalent input-disturbance approach[J]. IEEE Transactions on Industrial Electronics, 2008, 55(1): 380-389.
[8] She J, Xin X, Pan Y. Equivalent-input-disturbance approach��Analysis and application to disturbance rejection in dual-stage feed drive control system[J]. IEEE/ASME Transactions on Mechatronics, 2011, 16(2): 330-340.
[9] She J, Ohyama Y, Nakano M. A new approach to the estimation and rejection of disturbances in servo systems[J]. IEEE Transactions on Control Systems Technology, 2005, 13(3): 378-385.
[10] ����ƽ, ��־ǿ, ����, ��. һ�ֶ��г�ֱ�ߵ������ѧģ�ͼ���ʵ���о�[J]. �й��������ѧ��, 2005, 25(7): 131-136.
CHEN Youping, DU Zhiqiang, AI Wu, et al. Research on model of a new short-stroke liner motor and its experiments[J]. Proceeding of the CSEE, 2005, 25(7): 131-136.
[11] Pompermaier C, Jorge Haddad K F, Zambonetti A, et al. Small linear PM oscillatory motor: magnetic circuit modeling corrected by axisymmetric 2-D FEM and experimental characterization[J]. IEEE Transactions on Industrial Electronics, 2012, 59(3): 1389-1396.
[12] Smithmaitrie P, Suybangdum P, Laoratanakul P, et al. Design and performance testing of an ultrasonic linear motor with dual piezoelectric actuators[J]. IEEE Transactions on Ultrasonic, Ferroelectrics, and Frequency Control, 2012, 59(5): 1033-1042.
[13] ���ӽ�, ����, ��һ��. �����Կ��ſ��Ƽ����ĸ�ѹ�����첽���ֱ��ת�ؿ���ϵͳ[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2011, 42(11): 3392-3398.
LIU Zijian, WU Min, WANG Yijun. Direct torque control system of high-voltage high-power asynchronous machine based on active disturbance rejection control technique[J]. Journal of Central South University: Science and Technology, 2011, 42(11): 3392-3398.
[14] Gao Z. Active disturbance rejection control: a paradigm shift in feedback control system design[C]//Proceedings of the 2006 American Control Conference. Minneapolis: IEEE, 2006: 2399-2405.
[15] Gao Z. Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the American Control Conference. Denver: IEEE, 2003: 4989-4996.
(�༭ �°���)
�ո����ڣ�2012-10-06�������ڣ�2012-12-23
������Ŀ�����ҿƼ��ش�ר��������Ŀ(2009ZX02207)
ͨ�����ߣ�����(1982-)���У��Ĵ������ˣ���ʿ�о��������¹�̻�˫����̨����ϵͳ����о����绰��13946039547��E-mail��liuchuan1226@126.com
ժҪ�����ڸ߶�̬�����ŷ��˶�ƽ̨ϵͳģ�����һ�������Կ��ſ��Ʒ������÷����Ŀ�����ͨ������״̬�۲����۲�ϵͳ�Ķ�̬�仯������ϵͳ�е�δ��ģ��̬�����Ŷ���Ϊ��Сϵͳ�Ķ�̬������������ǰ����ϵͳ�ĸ��������в������ڴ˸��Ͽ��Ʒ�ʽ�£�������ʵ���Կ��ſ��ƣ�ǰ���������ܺõز��������һ�㷴������ϵͳ����߿��ƾ�����ȷ��ϵͳ�ȶ���֮����ڵ�ì�ܡ�ʵ��������������������Կ��ſ��Ʒ������Ƹ߶�̬�����ŷ��˶�ƽ̨ϵͳ�Ķ�̬���ܺͿ��������������ϵͳ�Ķ�λ���ȡ�
