DOI: 10.11817/j.issn.1672-7207.2019.11.009
单参数调整的欠驱动吊车防摆定位全过程自抗扰控制
肖友刚1, 2,卢浩1, 2,余驿1, 2,韩锟1, 2
(1. 中南大学 交通运输工程学院,湖南 长沙,410075;
2. 中南大学 轨道交通安全关键技术国际合作联合实验室,湖南 长沙,410075)
摘要:通过对比台车作业轨迹的理想值与实际值,构造台车作业轨迹的误差反馈控制律;针对绳长、负载、非线性等因素影响负载摆动且负载摆动角度和角速度难以测量的问题,设计负载摆动的扩张状态观测器,并构造抑制负载摆动的误差反馈控制律,进而得到不依赖于系统模型参数、结构简单且能抑制系统非线性及干扰影响的吊车防摆定位全过程自抗扰控制器。研究结果表明:使用Hurwitz稳定矩阵的特征值与控制系统增益产生关联,保证闭环系统的稳定性,而且将繁琐的控制系统参数化为容易实施的单参数调整,使吊车在绳长变化及外界恶劣环境的干扰下,实际作业曲线都能全过程按照设定轨迹以尽可能小的负载摆角运行,使台车作业时间得到准确控制,吊车作业效率显著提升。
关键词:欠驱动吊车;防摆定位;单参数调整;全过程自抗扰控制
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2019)11-2703-09
WADRC for anti-swing positioning of underactuated crane with one parameters tuning
XIAO Yougang1, 2, LU Hao1, 2, YU Yi1, 2, HAN Kun1, 2
(1. School of Traffic and Transportation Engineering, Central South University, Changsha 410075, China;
2. Joint International Research Laboratory of Key Technology for Rail Traffic Safety, Central South University, Changsha 410075, China)
Abstract: By comparing the ideal values with the actual values of the trolley operation track, the error feedback control law was constructed. Aiming at the uncertain factors such as rope length, load, nonlinearity and so on, which affect the load swing, and the problem that the load swing angle and angular velocity are difficult to measure, an extended state observer for load swing was designed. Then an error feedback control law was constructed to suppress the load swing. Furthermore, a whole-process active disturbance rejection controller(WADRC) for crane anti-swing positioning independent of system model parameters was formed, which was simple in structure and able to reject the influence of system nonlinearity and disturbance. The results show that by associating the eigenvalues of Hurwitz stability matrix with the gains of the control system, the stability of the closed-loop system is guaranteed, and several difficult-tuned control parameters are transformed into an easy-tuned parameter. Under the disturbance of rope length change and external bad environment, the actual operation track can run according to the set track with the smallest load swing angle as much as possible, so that the working time of the crane can be accurately controlled, and the efficiency of crane operation can be improved significantly.
Key words: underactuated crane; anti-swing positioning; single parameter tuning; WDRC(whole-process active disturbance rejection controller)
在港口、电站、地铁、路桥建设、各行业车间等领域,桥式吊车被广泛应用于搬运重物,其主要控制要求是将货物安全、快速、准确地搬到目标位置。然而,在吊车作业过程中,起吊质量、起吊位置存在很大不确定性,吊绳长度也会实时变化,摩擦力、风力、电网电压波动、振动等外界扰动存在很大随机性,这些因素导致质量大的物体易发生摆动,若到达目标点后残余摆动过大,则将导致摆动衰减过程耗时过长,工作效率低,并给司机的落吊操作带来困难,甚至可能与周围人员或物体发生碰撞而引发安全事故。现场有经验的司机可通过控制台车运动来抑制货物摆动,但效率低,且易发生误操作。为减少货物的残余摆动,目前现场常采用变频调速方式使货物以很慢速度就位,但效率低。如何保证吊车系统安全、准确、快速就位,并使货物摆动受到最大抑制且快速衰减,是吊车作业中尚待解决的重要问题。吊车系统在工作时,应尽可能快速、准确地到达目标位置,并使货物摆幅尽可能小,因此,对吊车系统进行控制时,需要同时控制吊车位移与负载摆角。吊车位移可以通过施加在台车上的驱动力来控制,而负载的欠驱动特性使其摆动不能靠驱动力来抑制,只能通过台车运动来控制,但外界干扰及不当的台车运动又会激发大的负载摆动,因此,需要采用科学的控制方式来控制台车运动,使负载摆幅最小。目前,许多学者将鲁棒控制、自适应控制、滑模控制、预测控制、非线性控制、轨迹跟踪控制、整形控制等方法或方法的组合应用于吊车系统控制[1-8]。虽然鲁棒控制和自适应控制能有效解决模型不确定性问题,但这些方法很多涉及大量复杂运算,导致实际应用困难,而滑模控制也存在现实中难以解决的抖动问题。为了提升欠驱动系统的控制性能,得到更高的控制精度和鲁棒性,将上述控制方法与学习算法、模糊方法、神经网络相结合,得到了桥式吊车的智能控制算法,如神经网络滑模控制[9]、自适应模糊控制[10]、自适应模糊滑模控制[11]、自适应神经网络模糊滑模控制[12]以及自适应迭代学习控制器等[13]。然而,模糊控制需要借鉴专家经验,经过模糊推理得到模糊控制器的输出,神经网络需要大量的训练来获得内部权值,学习算法需要长时间在线学习,这大大增加了控制器的设计和调整难度,使其工程应用困难,而且目前这些吊车控制方法仍然存在如下缺陷:1) 台车的工作起点默认为零,目标点的值为初始误差,当吊车作业距离很长时,初始控制量很大,甚至难以控制;2) 难以考虑吊绳绳长、负载质量、摩擦因数、空气阻力、振动等不确定性因素及外界干扰对台车定位及负载摆动控制的影响;3) 需要全状态反馈,但负载摆动角速度难以直接测量,且安装传感器会增加成本,导致系统结构复杂;4) 在设计轨迹跟踪的吊车控制系统时,要求理想轨迹的目标点不能远离初始点,且难以将台车速度、加速度、跟踪误差及负载摆角始终限制在安全范围内,也不能保证台车精确地按照设定的初始轨迹运行;5) 须通过在控制律中添加复杂的非线性耦合项以改善暂态控制性能,使控制器设计复杂;6) 参数整定困难,需要专业人员经过大量试调后才能确定可行的参数,而且难以达到最优;7) 采用复杂的非线性模型导致控制器设计复杂,难以推广应用,而采用线性化模型时要求负载实际摆角不能超过允许的摆角范围,否则控制性能急速变差,甚至导致系统闭环不稳定。HAN[14]提出的自抗扰控制技术(active disturbance rejection control, ADRC)以积分器串联型作为反馈系统的标准型,采用扩张状态观测器(ESO)对异于标准型的总和扰动进行实时估计,并主动补偿,从而将充满扰动、不确定性和非线性的被控对象转化为标准型进行控制。由于其自抗扰控制具有良好的抗干扰能力,已用于自主车[15]、潜水艇[16]、双足机器人[17]、Furuta摆[18]、质量弹簧减振系统[19]、球-刚性三角系统[20]等欠驱动装置的控制,但在应用时,需要根据实验结果整定各个回路的控制参数,导致参数整定工作量非常大,所整定的参数也会互相影响,一个参数调到最优后,另一个参数对应的性能又恶化,最终所得到的只是各个参数折中的结果,整体控制性能大大降低。针对以上不足,本文作者设计不依赖于系统模型参数、结构简单的吊车防摆定位全过程自抗扰控制器,将繁琐的控制参数调整为很容易实施的单参数调整,使吊车在绳长变化及外界恶劣环境的干扰下,实际作业轨迹都能全过程准确按照设定曲线以尽可能小的负载摆角运行,使台车作业时间得到准确控制,吊车作业效率显著提升。
1 欠驱动吊车控制器设计
欠驱动吊车的工作原理如图1所示(其中,x(t)为台车位移)。由图1可知,通过台车在桥架上的来回移动,可以将负载送到目标位置,但在运送过程中,负载会产生摆动。应用Euler-Lagrange方法,可得欠驱动吊车系统的动力学方程[7,19]:
 (1)
(1)
其中:M和m分别为台车质量和负载质量;θ和 分别为负载摆角和负载摆角加速度;l为摆线长度;F为台车驱动力;f为摩擦力;g为重力加速度;
分别为负载摆角和负载摆角加速度;l为摆线长度;F为台车驱动力;f为摩擦力;g为重力加速度; 为台车加速度。
为台车加速度。
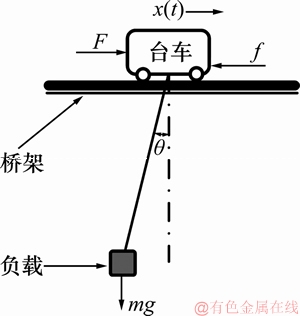
图1 欠驱动吊车工作原理
Fig. 1 Working principle of underactuated crane
吊车作业环境复杂,在不同场合,环境风速、周围障碍物差异很大,因此,应根据操作规程,在保障安全的前提下,确定设定台车的额定运行速度及加速度:在风力为3级至5级之间或周围障碍密集的复杂作业环境,选择低速作业方式;在风力为3级至1级之间或周围障碍较多的普通作业环境,选择中速作业方式;在风力为1级以下、周围障碍稀疏且无障碍的良好作业环境,选择高速作业方式。在台车不同作业方式下,为提高作业效率,设定台车均以该作业方式下的额定速度和加速度运行,具体作业指标如下:台车额定加速度为ae,台车额定速度为ve,台车作业起点和终点位置处的速度均为0 m/s,台车作业距离为s。为使吊车按要求准确快速地到达目标位置,构造如下S型曲线作为台车的理想作业轨迹 :
:
 (2)
(2)
式中: ,为台车初始加速度调节因子。
,为台车初始加速度调节因子。
根据式(1),可确定t时刻台车的理想位置v1,对式(2)可导可得t时刻台车的理想速度v2,利用相关传感器,可测得t时刻台车的实际位移x1,实际速度x2 ,则台车实际位置与理想位置信号的误差 为
为
 (3)
(3)
台车实际速度与理想速度的误差 为
为
 (4)
(4)
为使台车精确地按照设定的理想轨迹达到目标位置,应使台车在任意时刻的实际值和理想值误差尽可能地小。以台车加速度u1为控制量,设计吊车位置的误差控制律为
 (5)
(5)
式中:k1和k2分别为和的控制量增益系数。
从上述过程可以看出,在任意时刻t,台车都有1个理想位置信号和速度信号,通过任意时刻的误差反馈,实时纠正任意时刻实际位置与理想位置的偏差,控制台车全过程按照理想轨迹运行,并有效消除目标位置距离初始位置过长而导致的初始控制量过大问题。
吊车负载摆动严重影响着吊车运行安全和运送效率,因此,应使吊车运行全过程中的负载摆角尽可能地小。考虑系统扰动w (包括摩擦力、模型不确定部分和外扰)对欠驱动吊车负载摆动的作用,将负载摆动的动力学方程更新为
 (6)
(6)
为描述方便,将负载摆角θ记为θ1,负载摆动角速度记为θ2,对负载摆动的动力学方程(6)进行扩张,得
 (7)
(7)
式中:θ3为系统总和扰动;u为小车加速度,作为控制量;b为负载摆动控制量增益。
从式(7)可以看出台车运动导致负载摆动,要抑制负载摆动,就需将摆角的实时值和目标值的差反馈给台车,并据此施加考虑干扰影响的控制量,使其能通过台车和负载间的耦合运动,在外界干扰及系统不确定情况下抑制负载摆动。为达此目标,需要明确负载摆角的实时状态,但测量负载摆动角度和角速度不仅会使控制装置复杂,成本增加,而且难以实施,因此,采用线性扩张状态观测器LESO的设计方法[21],设计吊车摆角的LESO,实时估计负载摆动角度、角速度及系统总和扰动量,具体设计如下:
 (8)
(8)
式中:z1为负载摆角θ1的状态估计值;z2为对负载摆动角速度θ2的状态估计值;z3为影响负载摆动的总和扰动θ3的状态估计值; 为负载摆角的观测误差;b0为扩张状态观测器增益,为负载摆动控制量增益b的估计值;β01,β02和β03为三阶线性扩张状态观测器的参数,采用基于迭代步长h的三阶线性扩张状态观测器的参数序列[21],即
为负载摆角的观测误差;b0为扩张状态观测器增益,为负载摆动控制量增益b的估计值;β01,β02和β03为三阶线性扩张状态观测器的参数,采用基于迭代步长h的三阶线性扩张状态观测器的参数序列[21],即 。
。
从式(7)可知,负载摆动的控制量增益为
 (9)
(9)
因此,负载摆动的控制量增益可以用实际吊绳长度表示。在吊车控制过程中,吊绳长度很容易实测得到,因此,扩张状态观测器增益b0可根据实际摆线长度实时更新,且台车在运行过程中,cos θ1≈1,即
 (10)
(10)
负载摆动的稳定坐标为(θ1, θ2)=(0, 0),设计负载摆动的误差控制律为
 (11)
(11)
式中:k3和k4分别为z1和z2的控制量增益系数。
从式(1)可以看出,负载摆动状态是通过台车运动来控制的。要使台车按预定的理想轨迹运动,负载摆角须尽可能地小,故应该将台车运动控制量和负载摆动控制量进行合成,作为台车的综合控制量,即

 (12)
(12)
将式(12)代入 ,可得
,可得



 (13)
(13)
根据式(13),当扩张状态观测器没有误差或误差足够小即e3≈0时,式(13)这种串联积分式设计可以消除稳态误差,又可以消除未知扰动及模型中非线性部分的影响,提高系统的抗干扰能力,而且控制量u只与台车的实时状态、状态观测器误差及控制量增益有关,与系统各部分质量、摩擦力、初始状态、非线性项无关,因而,系统参数、外界干扰、非线性项不会影响系统的控制性能。
2 欠驱动吊车自抗扰控制性能
2.1 欠驱动吊车自抗扰控制参数分析
吊车防摆定位全过程自抗扰控制器包括2个误差反馈控制器,待整定的参数包括k1,k2,k3和k4,且台车位置和负载摆动相互耦合,靠试凑的方法显然是不合理的,且会耗费大量的时间和精力。由于自抗扰控制参数的取值必须满足控制系统稳定这一基本条件,因此,从这一基本条件出发,进一步精简并选取合适的控制参数。
将式(13)代入式(7)可得
 (14)
(14)
欠驱动吊车的理想目标状态可表示为(x1, x2, θ1, θ2)=(s, 0, 0, 0),因此,其误差可定义为
 (15)
(15)
扩张状态观测器的观测误差可定义为
 ,
, ,
, (16)
(16)
台车理想轨迹与目标状态的误差可定义为
 ,
, (17)
(17)
令ψ=[ψ1, ψ2, ψ3]T,e=[e1, e2, e3]T, =[
=[ 1, 2]T,根据式(14)~(17)可得整个控制系统的误差方程:
1, 2]T,根据式(14)~(17)可得整个控制系统的误差方程:
 (18)
(18)
其中:

将Aψ的特征值都配置在点(- , 0),> 0,使得Aψ是Hurwitz稳定矩阵,即
, 0),> 0,使得Aψ是Hurwitz稳定矩阵,即
 (19)
(19)
式中:I为4阶单位矩阵。
求解式(19)可得:
 (20)
(20)
欠驱动吊车自抗扰控制的控制率最终确定为

 (21)
(21)
由式(21)可知:台车作业轨迹误差反馈控制参数k1和k2以及负载摆动误差反馈控制参数k3和k4都由Hurwitz稳定矩阵的特征值-决定,并且当gt; 0时,即可保证矩阵Aψ是Hurwitz稳定矩阵,保障了系统误差的收敛性,且吊车定位防摆控制的4个待整定参数就转化为这1个参数,实现了吊车定位防摆控制的单参数调整,大大减少了参数整定工作量和难度。
2.2 欠驱动吊车自抗扰控制器稳定性分析
假设1 变量x1,x2,θ1,θ2和θ3在作业时间内是连续可微的。
假设2 系统总和扰动及其导数是有界的,即 。
。
将扩张状态观测器的观测误差e对时间t求导,再将式(8)代入,可得线性扩张状态观测器微分方程为
 (22)
(22)
其中: 。
。
选择如下函数Ve作为Lyapunov候选函数:
 (23)
(23)
对Ve针对时间t求导,可得
 (24)
(24)
将式(22)代入式(24)得
 (25)
(25)
求解矩阵E的特征值,可得其3个特征根的实部分别为 ,
, 和
和 。当h>0时,其特征值的实部均小于0,故矩阵E为Hurwitz稳定矩阵。因此,式(25)可更新为
。当h>0时,其特征值的实部均小于0,故矩阵E为Hurwitz稳定矩阵。因此,式(25)可更新为
 (26)
(26)
其中:λmin(E)为矩阵E的最小特征值。
当δ2=0时, ,因此,线性扩张状态观测器LESO在零点大范围渐进稳定。当δ2≠0时,系统的观测值会出现一定误差。由于系统达到稳态时有
,因此,线性扩张状态观测器LESO在零点大范围渐进稳定。当δ2≠0时,系统的观测值会出现一定误差。由于系统达到稳态时有 ,根据式(22)得到观测值的误差范围:
,根据式(22)得到观测值的误差范围:
 (27)
(27)
从式(27)可以看出:减小控制器步长h可以减小稳态误差,但步长小将降低算法的收敛速度和跟踪速度,对硬件设备的要求也更高。目前设备硬件性能已大幅度提高,因此,若在控制时追求更高的控制精度,宜选择较小步长;若要追求更快的控制速度,宜选择较大步长。
将式(18)进一步表示为
 (28)
(28)
其中: 。
。
矩阵Aψ是Hurwitz稳定矩阵,故令式(28)的Lyapunov函数为
 (29)
(29)
则

 (30)
(30)
当扰动θ3=0时, ,因此,系统在稳定点附近大范围稳定。
,因此,系统在稳定点附近大范围稳定。
当θ3≠0时,
 (31)
(31)
其中: 。
。
当系统稳定时,

 。根据式(18),可得到系统的误差范围:
。根据式(18),可得到系统的误差范围:
 (32)
(32)
从式(32)可以看出:当扩张状态观测器的观测值与实际值没有误差或观测误差足够小时,欠驱动吊车的系统的误差稳态误差可以足够小。
3 结果与分析
为了验证欠驱动吊车定位消摆全过程自抗扰控制器的有效性,采用如图2所示实验平台,其参数为:M=6.157 kg,m=1 kg,g=9.81 m/s2, ae=0.05 m/s2,ve=1 m/s。在实验中,计算机步长取0.05,仿真时将台车目标位置设定为100 m,根据吊车实验台长度,实验时将台车目标位置设定为0.2 m,经过充分整定后,式(20)中自抗扰控制线性控制参数ωc=4。将部分实验结果与采用线性二次最优LQR法、文献[22]中的ECNC(enhanced coupling nonlinear controller)法所得结果进行对比。对比中,这3种算法均采用式(2)所示的S型曲线作为台车定位的理想轨迹。LQR法控制律表达式为: 。经过充分整定后,控制量增益参数优选为:k1=2.7,k2=2.4,k3=-3,k4=-3。ECNC法的控制律表达式为:
。经过充分整定后,控制量增益参数优选为:k1=2.7,k2=2.4,k3=-3,k4=-3。ECNC法的控制律表达式为: ,控制参数优选为kp=50,kξ=50,λ=12。仿真结果如图3所示。
,控制参数优选为kp=50,kξ=50,λ=12。仿真结果如图3所示。
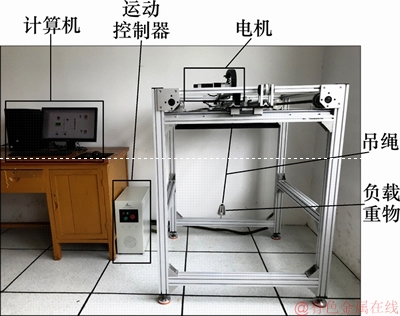
图2 欠驱动吊车实物控制实验
Fig. 2 Physical control experiment of underactuated crane
从图3可以看出:WADRC,LQR和ECNC这3种控制算法均能较好跟踪台车理想轨迹曲线,但启动时,WADRC法控制下负载摆角最小,稳定时间最短,作为控制量的台车加速度也最小;停止时,ECNC法控制下台车到达目标点耗时最长,LQR法控制下超调量最大。因此,WADRC法对吊车作业的控制效果最好。
实物控制实验结果如图4所示。从图4可以看出:自抗扰的仿真曲线与欠驱动吊车的控制曲线大致保持一致,说明仿真实验结果与实物实验结果具有良好的统一性。但由于实物实验时,电网电压波动和电磁干扰会影响控制效果,因此,实物控制曲线没有仿真曲线平滑,但WADRC法受影响程度最小,说明WADRC法具有更强的抗电磁干扰能力。
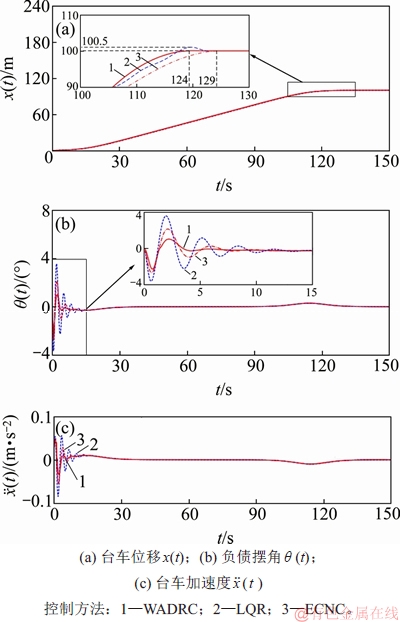
图3 3种控制方法下吊车防摆定位仿真结果
Fig. 3 Simulation results of anti-swing positioning of crane under three control methods
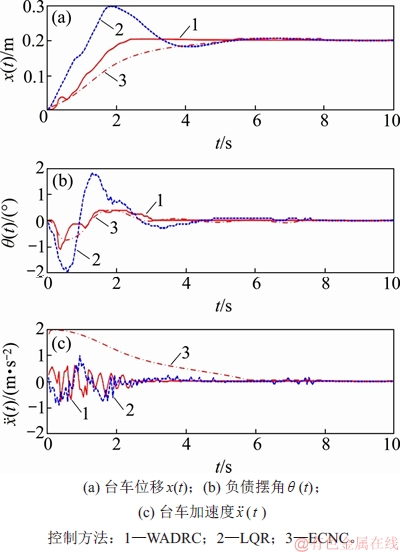
图4 3种控制方法下吊车防摆定位实验结果
Fig. 4 Experimental results of anti-swing positioning of crane under three control methods
在工业上,吊车作业环境复杂,为验证WADRC法的抗外扰能力,在0~10 s时对负载摆角施加幅值为3°的随机扰动(noise 1),在50 s时对负载摆角施加幅值为3°的脉冲扰动(noise 2),在100~110 s时对负载摆角施加频率为1、幅值为3°的正弦扰动(noise 3),在130~140 s时对负载摆角施加幅值为6°的随机扰动(noise 4),实验结果如图5所示。从图5可以看出:在不同阶段对负载施加扰动,台车都能够按照设定曲线运动,到达目标点的时间仍为120 s,负载摆角都能控制在合理范围内;且当扰动消除之后,WADRC法控制下负载摆角均能快速回到并稳定在目标值,说明WADRC法具有较强的抗负载摆角扰动的能力。
为提高系统工作效率,在有些情况下会同步进行负载升降与水平运送动作,此时,吊绳长度从常值转变为变量。为检验WADRC法对绳长参数变化的敏感性,对负载在1~7 s内从1.0 m上升到2.4 m,在45~65 s内从2.4 m上升到12.4 m,在90~100 s从12.4 m下降到0.4 m进行仿真实验,得到如图6所示的实验结果。从图6可以看出:虽然在负载上升和下降过程中,吊绳长度经历了缩短、变长和不变共3种状态,但台车还是能够精确按照设定的理想曲线运动,且到达目标点的时间仍为 120 s;在台车加、减速过程中,负载的升降运动虽然使负载摆角出现了一定波动,但波动幅度极小;在台车匀速平移过程中,负载的升降运动对负载摆角几乎没有影响,说明WADRC法对绳长变化有极强的鲁棒性。
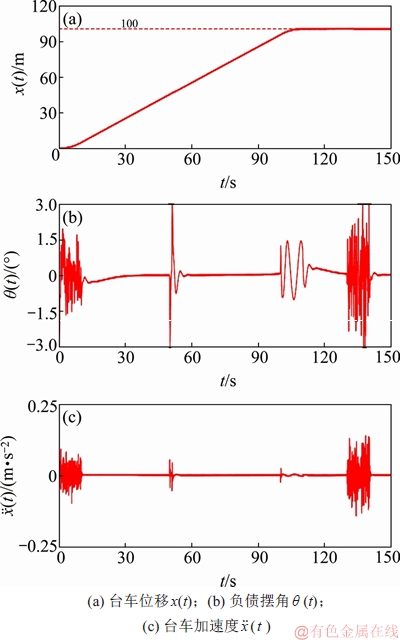
图5 不同扰动作用下WADRC法对吊车防摆定位的控制效果
Fig. 5 Effects for method WADRC with different external disturbances
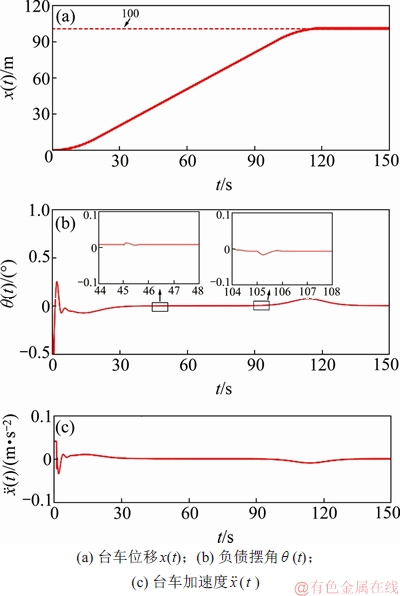
图6 负载升降过程中WADRC法对吊车防摆定位的控制效果
Fig. 6 Effects for method WADRC with payload hoisting-lowering
4 结论
1) 针对绳长变化、负载、非线性等因素影响负载摆动且负载摆动角度和角速度难以测量的问题,设计了不依赖于系统模型参数、能抑制系统非线性及干扰影响且无需摆角传感器的吊车防摆定位全过程自抗扰控制器,实现了吊车在非线性、参数不确定、外界恶劣环境及长距离作业情况下,任意位置处的负载摆角控制。
2) 台车运动全过程自抗扰控制通过纠正任一时刻实际位置与理想位置的偏差,使台车全过程按照设定的理想轨迹运行,台车作业时间得到了准确控制,吊车作业效率显著提升,为吊车全过程自动作业提供了技术支撑。
3) 实现了吊车防摆定位控制器的单参数调整,显著减少了参数调整工作量和难度。
参考文献:
[1] RAMLI L, MOHAMED Z, ABDULLAHI A M, et al. Control strategies for crane systems: a comprehensive review[J]. Mechanical Systems and Signal Processing, 2017, 95(10): 1-23.
[2] MAGHSOUDI M J, RAMLI L, SUDIN S, et al. Improved unity magnitude input shaping scheme for sway control of an underactuated 3D overhead crane with hoisting[J]. Mechanical Systems and Signal Processing, 2019, 123: 466-482.
[3] 孙宁. 欠驱动吊车轨迹规划与非线性控制策略设计、分析及应用[D]. 天津: 南开大学计算机与控制工程学院, 2014: 1-15.
SUN Ning. Trajectory planning and nonlinear control for underactuated cranes: design, analysis, and applications[D]. Tianjin: Nankai University. College of Computer and Control Engineering, 2014: 1-15.
[4] 武宪青. 桥式吊车系统的部分反馈线性化控制研究[D]. 杭州: 浙江工业大学信息工程学院, 2016:1-14.
WU Xianqing. Research on partial feedback linearization control of overhead crane systems[D]. Hangzhou: Zhejiang University of Technology. College of Information Engineering, 2016: 1-14.
[5] 张梦华. 欠驱动单级摆及二级摆型桥式吊车非线性控制策略研究[D]. 济南: 山东大学控制科学与工程学院, 2018: 1-13.
ZHANG Menghua. Nonlinear control for single-pendulum and double-pendulum overhead cranes[D]. Jinan: Shandong University. College of Control Science and Engineering, 2018:1-13.
[6] SUN Ning, FANG Yongchun, CHEN He, et al. A new antiswing control method for underactuated cranes with unmodeled uncertainties: theoretical design and hardware experiments[J]. IEEE Transactions on Industrial Electronics, 2015, 62(1): 453-465.
[7] ZHANG Menghua, MA Xin, RONG Xuewen, et al. Error tracking control for underactuated overhead cranes against arbitrary initial payload swing angles[J]. Mechanical Systems and Signal Processing, 2017, 84: 268-285.
[8] ZHANG Zhongcai, WU Yuqiang, HUANG Jinming. Differential-flatness-based finite-time anti-swing control of underactuated crane systems[J]. Nonlinear Dynamics, 2017, 87(3): 1749-1761.
[9] LEE L H, HUANG P H, SHIH Y C, et al. Parallel neural network combined with sliding mode control in overhead crane control system[J]. Journal of Vibration and Control, 2014, 20(5): 749-760.
[10] WU T S, KARKOUB M, YU W S, et al. Anti-sway tracking control of tower cranes with delayed uncertainty using a robust adaptive fuzzy control[J]. Fuzzy Sets and Systems, 2016, 290(5): 118-137.
[11] PEZESHKI S, BADAMCHIZADEH M A, GHIASI A R, et al. Control of overhead crane system using adaptive model-free and adaptive fuzzy sliding mode controllers[J]. Journal of Control, Automation and Electrical Systems, 2015, 26(1): 1-15.
[12] BENHELLAL B, HAMERLAIN M, RAHMANI Y. Decoupled adaptive neuro-interval type-2 fuzzy sliding mode control applied in a 3DCrane system[J]. Arabian Journal for Science and Engineering, 2018, 43(6): 2725-2733.
[13] QIAN Yuzhe, FANG Yongchun, LU Biao. Adaptive repetitive learning control for an offshore boom crane[J]. Automatica, 2017, 82: 21-28.
[14] HAN Jingqing. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[15] XIA Yuanqing, PU Fan, LI Shengfei, et al. Lateral path tracking control of autonomous land vehicle based on ADRC and differential flatness[J]. IEEE Transactions on Industrial Electronics, 2016, 63(5): 3091-3099.
[16] MIAO Jianming, WANG Shaoping, ZHAO Zhiping, et al. Spatial curvilinear path following control of underactuated AUV with multiple uncertainties[J]. ISA Transactions, 2017, 67(1): 107-130.
[17] MARTINEZFONSECA N, CASTANEDA L, URANGA A, et al. Robust disturbance rejection control of a biped robotic system using high-order extended state observer[J]. ISA Transactions, 2016, 62(2): 276-286.
[18] RAM REZ-NERIA M, SIRA-RAMREZ H, GARRIDO-MOCTEZUMA R, et al. Linear active disturbance rejection control of underactuated systems: the case of the Furuta pendulum[J]. ISA Transactions, 2014, 53(4): 920-928.
REZ-NERIA M, SIRA-RAMREZ H, GARRIDO-MOCTEZUMA R, et al. Linear active disturbance rejection control of underactuated systems: the case of the Furuta pendulum[J]. ISA Transactions, 2014, 53(4): 920-928.
[19] MORA C M, ROSAS A D, RASCON C R, et al. Robust output control of an uncertain underactuated 2DOF mass-spring-damper system with backlash based on active disturbance rejection control structure[J]. Mathematical Problems in Engineering, 2018. DOI:10.1155/2187534047.
[20] AGUILAR-IBANEZ C, SIRA-RAMIREZ H, SUAREZ-CASTANON M S. A linear active disturbance rejection control for a ball and rigid triangle system[J]. Mathematical Problems in Engineering, 2016, DOI:10.1155/2016/1318930.
[21] 韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 183-239.
HAN Jinqing. Active disturbance rejection control technique: the technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008: 183-239.
[22] SUN Ning, FANG Yongchun, WU Xianqing. An enhanced coupling nonlinear control method for bridge cranes[J]. IET Control Theory & Applications, 2014, 8(13): 1215-1223.
(编辑 陈灿华)
收稿日期: 2019 -01 -08; 修回日期: 2019 -03 -21
基金项目(Foundation item):国家自然科学基金资助项目(51275531);湖南省科技计划项目(2013GK3004)(Project(51275531) supported by the National Natural Science Foundation of China; Project(2013GK3004) supported by the Science and Technology Plan of Hunan Province)
通信作者:肖友刚,博士,教授,博士生导师;从事设备状态监测与智能控制研究;E-mail: csuxyg@163.com

