基于自抗扰控制技术的高压大功率
异步电机直接转矩控制系统
刘子建,吴敏,王一军,陈鑫,王春生,雷琪
(中南大学 信息科学与工程学院,湖南 长沙,410083)
摘要:针对异步电机的非线性特点,设计一种新颖的级联型多电平逆变器供电的高压大功率异步电机直接转矩控制系统。在定子坐标系内对定子磁链与电机转矩进行闭环控制得到定子磁链增量,包括定子磁链的幅值增量和相位增量。由定子磁链增量计算异步电机定子电压矢量,定子磁链和电机转矩采用自适应观测器估计。采用自抗扰控制技术设计速度、转矩和定子磁链控制器,这些控制器具有鲁棒性强的特点。研究结果表明:通过速度控制器对负载扰动进行估计和补偿,消除了负载扰动可能带来的稳态跟踪误差;逆变器的开关信号利用载波移相脉宽调制方法生成,从而减少了转矩和定子磁链幅值的脉动;系统具有良好的动态和稳态性能。
关键词:异步电机;直接转矩控制;自抗扰控制;级联型多电平逆变器;脉宽调制
中图分类号:TM343 文献标志码:A 文章编号:1672-7207(2011)11-3392-07
Direct torque control system of high-voltage high-power asynchronous machine based on active disturbance rejection control technique
LIU Zi-jian, WU Min, WANG Yi-jun, CHEN Xin, WANG Chun-sheng, LEI Qi
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: Considering the nonlinear characteristic of asynchronous machine, a novel approach to direct torque control system of high-voltage high-power asynchronous machine fed was presented using cascaded multilevel inverter. The stator flux increment vector including range increment and phase increment was obtained when the stator flux and machine torque were controlled in a closed way in the stator coordinate. The required stator voltage vector was calculated according to the stator flux increment vector. The stator flux and machine torque were estimated by an adaptive observer. The speed, torque and stator flux controllers were designed by using active disturbance rejection control technique, and these controllers have high robustness. The load disturbance was estimated and compensated by the speed controller, which effectively removed the static tracking error that would be caused by the disturbance without compensation. The results show that inverter switching signals are generated by carrier phase-shifted pulse width modulation method, and thus the torque and stator flux amplitude ripples are reduced. The closed-loop control system has excellent dynamic and static performance.
Key words: asynchronous machine; direct torque control; active disturbance rejection control; cascaded multilevel inverter; pulse width modulation(PWM)
在许多应用场合,高压大功率异步电机要求具有高性能调速的功能。在已提出的多电平逆变器拓扑中,级联型多电平逆变器可以通过改变串联单元的个数来适应不同的输出电压要求,特别适合用作高压大功率异步电机的调速装置[1]。级联型多电平逆变器一般采用载波移相脉宽调制方法,该方法具有实现简单、易于扩展的特点[2]。直接转矩控制[3-4]是继矢量控制之后的又一种高性能传动控制方法,但直接转矩控制在级联型多电平逆变器供电的高压大功率异步电机调速系统中应用较少[5-6]。基于磁环比较和优化矢量表的传统直接转矩控制在两电平和三电平逆变器上容易实现。但级联型多电平逆变器的电压矢量多,优化矢量表难以确定。在两电平和三电平逆变器的开关控制中,结合空间矢量调制技术可以有效地改进传统直接转矩控制转矩、磁链、电流脉动大和逆变器开关频率不恒定的缺点[7],但级联型多电平逆变器的空间矢量调制仍是一个难题。将载波移相脉宽调制方法引入到直接转矩控制中,就能够将直接转矩控制应用到级联型多电平逆变器中,可以改进传统直接转矩控制转矩以及磁链和电流脉动大的缺点。异步电机是非线性多变量强耦合的时变系统,其精确的数学模型难以建立,采用基于精确数学模型的控制方法难以得到好的控制效果。自抗扰控制[8-9]发挥了传统PID控制的优点(即基于误差而消除误差)、开发运用特殊非线性效应而发展起来的新型实用控制技术,是继PID控制之后的一种新的不依赖于对象精确数学模型的控制方法。自抗扰控制可以对系统的内外扰动进行估计并给予补偿,当被控对象参数发生变化或遇到不确定性扰动时仍能得到很好的控制效果,具有较强的鲁棒性。Sun等[10-13]将自抗扰控制技术应用到电力电子与电力传动领域,获得了很好的控制效果。本文将自抗扰控制技术和载波移相脉宽调制方法应用到级联型多电平逆变器供电的高压大功率异步电机直接转矩控制系统中,阐述级联型多电平逆变器的拓扑结构和调制方法,介绍异步电机的数学模型和圆形磁链轨迹直接转矩控制,给出控制算法的推导过程,通过仿真验证所提控制策略的有效性。
1 级联型多电平逆变器简介
级联型多电平逆变器是高压大功率交流传动系统中应用最为广泛的逆变器拓扑结构之一,其拓扑结构如图1所示。级联型多电平逆变器由多个功率单元组成,采用多个功率单元的串联来实现高压输出,并减小输出电压的谐波。设每相串联的功率单元数为m,则对应的电平数n=2m+1。图1所示为11电平的逆 变器。
级联型多电平逆变器一般采用载波移相脉宽调制PWM方法[2],对于一个n电平的三相逆变器,每相用n-1个幅值和频率相同而依次移相360°/(n-1)的三角载波分别与调制波进行比较,生成相对独立的n-1组PWM信号,去驱动对应的功率单元,各功率单元的输出相加生成多电平PWM波形。当采用载波移相PWM方法时,逆变器等效开关频率为器件开关频率的n-1倍,因此,可以在不提高载波频率的条件下,大大减少输出电压的谐波。
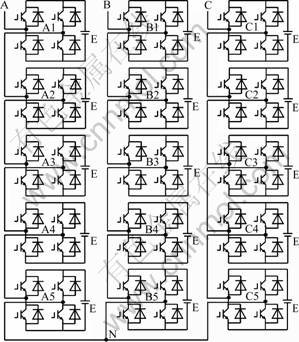
图1 级联型多电平逆变器拓扑结构
Fig.1 Topology of cascaded multilevel inverter
2 圆形磁链轨迹直接转矩控制
采用圆形磁链轨迹的直接转矩控制,能充分利用电机磁通,避免磁链轨迹畸变,减少定子电流的谐波成分[7]。本文采用圆形磁链轨迹的直接转矩控制方案。
2.1 异步电机的数学模型
三相异步电动机在静止αβ坐标系的数学模型为:
 (1)
(1)
式中:us为定子电压;is为定子电流;ψs为定子磁链;ψr为转子磁链;Rs为定子电阻;Rr为转子电阻;ωr为转子电角速度;pn为电机极对数;J为转动惯量;Te为电磁转矩;TL为负载转矩;下标α和β分别表示α和β轴;下标s和r分别表示定子侧和转子侧。
2.2 圆形磁链轨迹控制的数学关系
1个开关周期时间为Tc,第k个开关周期内定子磁链从ψs(k-1)旋转到ψs(k),空间角度变化量为Δθ(k),幅值变化量为Fψ(k),可用数学模型表述为:
 (2)
(2)
1个开关周期的定子磁链变化量为:

 (3)
(3)
由式(1)的第1个式子和式(3)可得:
 (4)
(4)
2.3 圆形磁链轨迹控制的基本原理
基于圆形磁链轨迹的异步电机直接转矩控制系统的结构框图如图2所示。定子磁链、转子磁链和实际电磁转矩由观测器得到;定子磁链幅值变化量Fψ由磁链控制器得到;通过速度控制器得到给定转矩。定子磁链空间角度变化量Δθ由2部分组成:动态分量Δθd和静态分量Δθs。动态分量Δθd由转矩控制器得到,静态分量Δθs由前1个开关周期的定子频率预测得到。最后通过式(4)得到控制电压。

图2 异步电机直接转矩控制系统的结构框图
Fig.2 Scheme of asynchronous machine direct torque control system
3 控制系统设计
3.1 自抗扰控制器简介
自抗扰控制器[9]一般由3部分即非线性跟踪微分器、扩张状态观测器和非线性状态误差反馈组成。非线性跟踪微分器用来实现对系统输入信号的快速无超调跟踪,并能对其给出良好的微分信号;扩张状态观测器对系统的状态和扰动进行估计;非线性状态误差反馈获得控制量,且控制量中含有扰动的补偿量。最复杂的自抗扰控制器包含上述3个部分,最简单的自抗扰控制器只有非线性状态误差反馈。
3.2 基于自抗扰控制的速度控制器设计
为了有效地抑制负载扰动,有必要采用自抗扰控制器对转速进行控制。为了简化设计,省略非线性跟踪微分器,自抗扰控制器由1个二阶扩张状态观测器和1个一阶非线性状态误差反馈组成。为了便于设计自抗扰控制器,将式(1)的第3个式子写成如下规范化形式:
 (5)
(5)
式中:
 ;
; ;
; 。
。
与式(5)对应的二阶扩张状态观测器为:
 (6)
(6)
式中: 。
。
当α<1时,fal函数具有误差小时增益大而误差大时增益小的特点。
只要适当选择参数β1,β2,g1和d1,二阶扩张状态观测器就能很好地估计状态ωr和负载扰动f,即
 (7)
(7)
至此,可以求出负载转矩的估计值 :
:
 (8)
(8)
常用式(8)来检测扩张状态观测器的性能。一阶非线性状态误差反馈取为:
 (9)
(9)
控制量取为
 (10)
(10)
3.3 基于自抗扰控制的转矩控制器设计
定子磁链空间角度变化量的动态分量Δθd通常采用PI控制器得到。采用最简单的自抗扰控制器得到:
 (11)
(11)
定子磁链空间角度变化量的静态分量Δθs由下式确定:
 (12)
(12)
从控制理论的角度看,定子磁链空间角度变化量的静态分量Δθs为前馈补偿项,起到加快动态响应的作用。定子磁链空间角度变化量Δθ为:
 (13)
(13)
3.4 基于自抗扰控制的磁链控制器设计
定子磁链幅值变化量Fψ通常采用PI控制器得到,下面采用最简单的自抗扰控制器得到:
 (14)
(14)
3.5 磁链观测器
定子磁链观测器是异步电机直接转矩控制系统中极为重要的一个环节,它的准确性对系统的稳定性和精确度有着直接的影响[14]。本文采用自适应观测器估计定子磁链。在两相静止αβ坐标系中,以定子磁链和转子磁链为状态变量的异步电机数学模型为:

 (15)
(15)
式中:
 ;
; ;
;
 ;
;
 ;
; ;
; ;
;
 ;
; ;
; ;
;
 ;
; ;
;
 ;
; ;
; ;
;
Ls为定子自感;Lr为转子自感;Lm为定转子间互感。
根据式(15)构造异步电机的全阶状态观测器:
 (16)
(16)
式中:上标“^”表示估计值;G为增益矩阵。
采用文献[15]的方法来设计增益矩阵G,G由下式确定:
 (17)
(17)
式中: ;
; ;
;

 ;
; ; k>1。
; k>1。
根据式(16)观测的定子磁链分量就可以按下式算出定子磁链的幅值和电磁转矩:
 (18)
(18)
4 仿真结果
为了验证所提控制策略的有效性,在MATLAB环境下进行数值仿真。仿真中采用的异步电机参数为额定功率PN=880 kW,额定电压UN=6 kV,额定转速nN=990 r/min,额定转矩TN=8 489 N・m,Rs=0.156 Ω,Rr=0.164 Ω,Lm=96.01 mH,Ls=98.976 mH,Lr=100.481 mH,pn=3,J=15 kg・m2;速度控制器参数为β1=20 000,β2=300 000,g1=0.99,d1=0.01,β=1 800,g2=0.9,d2=0.01;转矩控制器参数为β3=0.000 01,g3=0.9,d3=0.01,Tc=100 μs;磁链控制器参数为β4=0.01,g4=0.9,d4=0.01;定子磁链观测器参数k=1.2。逆变器为11电平的,三角载波频率为1 kHz。
图3所示为系统起动响应波形。电机空载运行,转速给定值为300 rad/s,定子磁链给定值为13 Wb。从图3可以看出:转速无超调、稳态无偏差;逆变器输出电压谐波含量低。
图4所示为参考转速突变时动态响应波形。电机空载运行,转速有0,±10,50,±300 rad/s共6种给定值,定子磁链给定值为13 Wb。可以看出转速能够快速准确地跟踪指令,响应平滑。

图3 系统起动响应波形
Fig.3 Wave shapes of start-up behaviors

图4 参考转速突变时动态响应波形
Fig.4 Response to a step speed reference variation
图5所示为负载突变时动态响应波形。转速给定值为300 rad/s,定子磁链给定值为13 Wb。从图5可以看出:自抗扰速度控制器能够快速准确地实时估计负载的变化,并消除负载变化对转速的影响,转速无稳态误差;PI速度控制器不能实时估计负载的变化,转速存在稳态误差;自抗扰速度控制器的抗扰动能力明显比PI速度控制器的抗扰动能力强。
自抗扰控制器所用电机参数有转动惯量J和电机极对数pn,转动惯量J在电机运行过程中会发生变化。图6所示为转动惯量突变时的动态响应波形。电机所带负载为8 kN・m,转速给定值为10 rad/s,定子磁链给定值为13 Wb。从图6可以看出:转动惯量的变化对转速和定子磁链的影响均很小;转矩和定子磁链幅值的脉动小。
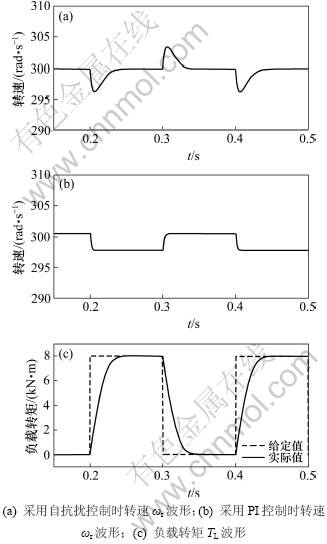
图5 负载突变时动态响应波形
Fig.5 Response to a step load variation
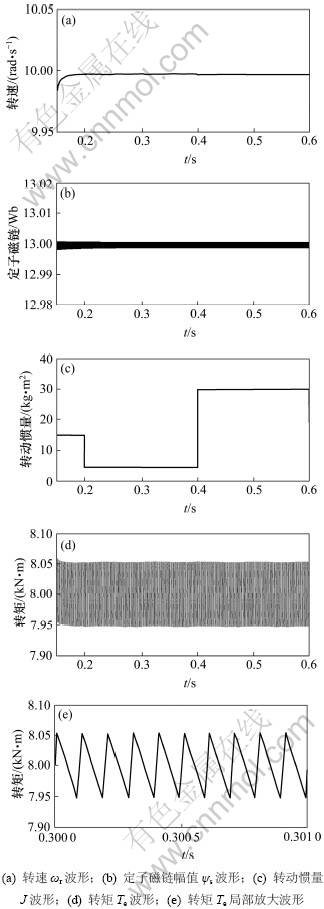
图6 转动惯量突变时动态响应波形
Fig.6 Response to a step variation of moment of inertia
5 结论
(1) 自抗扰控制器设计简单,控制性能良好。速度、转矩和定子磁链均采用自抗扰控制,使控制系统具有以下特点:起动过程中转速无超调、稳态无偏差;转速稳态精度高、动态响应快;抑制负载扰动的能力强;对转动惯量的变化有很强的鲁棒性。
(2) 自适应观测器能准确地估计定子磁链和电机转矩。
(3) 采用载波移相脉宽调制方法生成级联型多电平逆变器的开关信号,使转矩和定子磁链幅值的脉 动小。
参考文献:
[1] Malinowski M, Gopakumar K, Rodriguez J, et al. A survey on cascaded multilevel inverters[J]. IEEE Transactions on Industrial Electronics, 2010, 57(7): 2197-2206.
[2] Rodriguez J, Lai J, Peng F. Multilevel inverters: A survey of topologies, controls, and applications[J]. IEEE Transactions on Industrial Electronics, 2002, 49(4): 724-738.
[3] Takahashi I, Noguchi T. A new quick-response and high-efficiency control strategy of an induction motor[J]. IEEE Transactions on Industry Applications, 1986, 22(5): 820-827.
[4] Depenbrock M. Direct self control(DSC) of inverter-fed induction machine[J]. IEEE Transactions on Power Electronics, 1988, 3(4): 420-429.
[5] Rodriguez J, Pontt J, Kouro S, et al. Direct torque control with imposed switching frequency in an 11-level cascaded inverter[J]. IEEE Transactions on Industrial Electronics, 2004, 51(4): 827-833.
[6] 王毅, 石新春, 李和明, 等. 级联型多电平逆变器的新型直接转矩控制[J]. 中国电机工程学报, 2005, 25(22): 83-87.
WANG Yi, SHI Xin-chun, LI He-ming, et al. A novel direct torque control strategy for cascaded multilevel inverters[J]. Proceeding of the CSEE, 2005, 25(22): 83-87.
[7] Buja G, Kazmierkowski P. Direct torque control of PWM inverter-fed AC motors: A survey[J]. IEEE Transactions on Industrial Electronics, 2004, 51(4): 744-757.
[8] Han J. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[9] 韩京清. 自抗扰控制技术―估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 243-287.
HAN Jing-qing. Active disturbance rejection control technique―the technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008: 243-287.
[10] Sun B, Gao Z. A DSP-based active disturbance rejection control design for a 1-kw H-bridge DC-DC power converter[J]. IEEE Transactions on Industrial Electronics, 2005, 52(5): 1271-1277.
[11] 邓文浪, 令狐文娟, 朱建林. 应用自抗扰控制器的双级矩阵变换器闭环控制[J]. 中国电机工程学报, 2008, 28(12): 13-19.
DENG Wen-lang, LINGHU Wen-juan, ZHU Jian-lin. Closed-control for two-stage matrix converter based on auto-disturbance rejection controller[J]. Proceeding of the CSEE, 2008, 28(12): 13-19.
[12] Su Y, Zheng C, Duan B. Automatic disturbances rejection controller for precise motion control of permanent-magnet synchronous motors[J]. IEEE Transactions on Industrial Electronics, 2005, 52(3): 814-823.
[13] 任一峰, 刘刚, 赵敏. 自抗扰技术在异步电机DTC系统中的应用[J]. 电气传动, 2009, 39(6): 15-18.
REN Yi-feng, LIU Gang, ZHAO Min. Application of active disturbance rejection control in direct torque control of induction motor[J]. Electric Drive, 2009, 39(6): 15-18.
[14] 奚国华, 高宏洋, 许为, 等. 定子磁链全阶观测器增益矩阵的确定方法[J]. 中南大学学报: 自然科学版, 2008, 39(4): 793-798.
XI Guo-hua, GAO Hong-yang, XU Wei, et al. A method to determine gain matrix of stator flux full order observer[J]. Journal of Central South University: Science and Technology, 2008, 39(4): 793-798.
[15] Kubota H, Matsuse K. DSP-based adaptive flux observer of induction motor[J]. IEEE Transactions on Industry Applications, 1993, 29(2): 344-348.
(编辑 陈灿华)
收稿日期:2010-11-07;修回日期:2011-01-28
基金项目:国家自然科学基金资助项目(60974045)
通信作者:王一军(1963-),男,辽宁台安人,博士,教授,从事系统工程、交通信息工程及控制研究;电话:0731-88879629;E-mail: xxywyj@sina.com

