Stability of repetitive control with multi-channel periodic input signal
LI Xing(李醒), WANG Jian-hui(王建辉), FANG Xiao-ke(方晓柯)
(College of Information Science and Engineering, Northeastern University, Shenyang 110004, China)
Abstract: The problem of stability on repetitive control system with multi-channel periodic input signal was analyzed. It introduced filter into multi-channel repetitive controller (MCRC) and built a multi-channel filter repetitive controller (MCFRC) to increase stableness and robustness of system. Compared with original method, this method has excellent control effect and improves the precision and robustness of tracking system by calculation and simulation.
Key words: repetitive control system with multi-channel periodic input signal; multi-channel filter repetitive controller (MCFRC); stableness; robustness
CLC number: TP13 Document code: A Article ID: 1672-7207(2011)S1-0344-05
1 Introduction
Repetitive control[1] is a kind of design theory of control system which was proposed in 1980s. Its purpose is to design a controller, which can track any reference periodic signal and reach excellent steady-state accuracy. Chang et al[2] studied the design method of repetitive control with multi-channel periodic input signal and proposed multi-channel digital repetitive control system. It analyses the parameter select ruler and opens new doors in the study of repetitive control system with multi-channel periodic input signal.
In order to study the problem of stability on repetitive control with multi-channel periodic input signal based on Ref.[2], the filter into multi-channel repetitive controller (MCRC) was introduced and a multi-channel filter repetitive controller (MCFRC) was built to reduce affection on cancellation of high- frequency phase for modeling error reason or another, increasing the stableness and robustness of system.
2 Issues
In Ref.[2], multiple repetitive control loops parallel was embed into the closed-loop of multi-channel periodic input signal control system, which is specific designed according to base band signal. Repetitive control system with multi-channel periodic input signal as shown in Fig. 1.
Pulse transfer function of closed-loop system in Fig.1 is
 (1)
(1)
where  .
.
Multi-channel repetitive controller K(z) is
 ,
, (2)
(2)
 and
and 
Characteristic equation of system is
 (3)
(3)
Because , , so Eq.(3) can be changed into
, so Eq.(3) can be changed into
 (4)
(4)
So  ,
, .
.
Therefore, characteristic roots of multi-channel repetitive control system are all on the unit disk as shown in Fig.1. So the system shows the status of critical oscillation and has bad stability. If the object model has a slight deviation, or a slight changing in the object parameters, the whole closed-loop system will be very likely to lose stability. This paper will pay more attention to solve afore-mentioned problems in order to increase the stableness of system.
3 Multi-channel filter repetitive controller (MCFRC)
In this work, filter Q(z) into multi-channel repetitive controller (MCRC) was introduced, through regulating effect of filter Q(z) to increase the system stability margin, as shown in Fig.2:
Pulse transfer function of closed-loop system in Fig.2 is
 (5)
(5)
Input-output relationship of improved multi-channel repetitive controller is as follows:

Error characteristic equation is
 (6)
(6)
Using small-gain principle[3] which is in the control theory, the sufficient stability condition of control system is :
 (7)
(7)
where T is sampling period, , and frequency response function is obtained.
, and frequency response function is obtained.
In this work, the various parts of Eq.(7) in the form of frequency responsein on complex plane were expressed. This means that in the whole range of ω from 0 to π/T, trajectory which is caused by the end of the vector  cannot exceed unit disk which circle center is the end of the vector
cannot exceed unit disk which circle center is the end of the vector  , as shown in Fig.3.
, as shown in Fig.3.
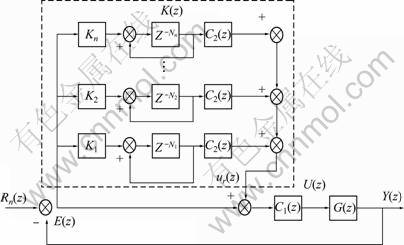
Fig.1 Repetitive control system with multi-channel periodic input signal[2]
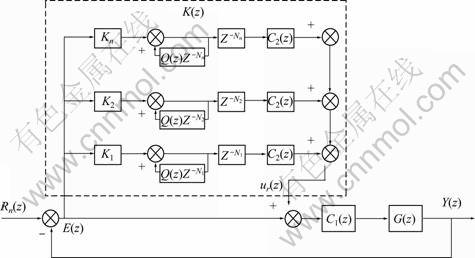
Fig.2 Multi-channel filter repetitive control system (MCFRC)

Fig.3 Geometrical mean of stability condition
Let Q(z) be constant with Q(z)<1 or be function with low pass characteristic. Fig.3 can display Q(z) mechanism how to increase stableness and robustness of system.
When Q(z) is a constant with Q(z)<1, the centre of a circle move 1- Q(z) to the left, and then unit disk covers a small part of the second and forth quadrants[4]. Although this part of the area is small, it can guarantee
that gain of vectorcan be reduced to 1-Q(z), satisfying the stability condition. If Q(z)=1, and
then the centre of unit disk (part of dotted line in Fig.3) will be fixed at (1, 0) point, and the left side of circumference will pass through the origin and be tangent with imaginary axis. However, allow for inevitable modeling error, phase compensation cannot be absolutely accurate. In the low-frequency, due to the error of phase compensation is small and effect of amplitude compensation is better, Eq.(7) can be satisfied. But in the middle and high frequencies, it is difficult to ensure cancellation effect[5] and will make trajectory of
vector into the second and forth
quadrants exceeding the unit circle, so that stability condition of system is destroyed. So Q(z) can make the unit disk shift left and reduce affection on cancellation of high-frequency phase for modeling error reason or another. It would not destroy the sufficient condition of system stability, increasing the stableness and robustness of system.
When Q(z) is a function with low pass characteristic and then the centre of a circle is not a fix value, yet the functions are the same. At this time, allow for the effect of phase frequency characteristics on trajectory of unit disk based on Q(z) zero-phase, analysis
of  is very difficult.
is very difficult.
Besides, when the equation has higher degree, solution of equation is difficult and we must adjust parameters and compute repeatedly, so we do not consider this situation.
Certificate of stability:
For the discrete system, if the modules of characteristic roots of the characteristic equation are all in the circle, then the system is stable[6].
So this work supposes that characteristic root of Eq.(5) is [7], Q(z) is real number less than 1 then
[7], Q(z) is real number less than 1 then



The real part of  is:
is:

If  , then
, then ,
,  , then
, then

So 
Because ,then


That is

So

Contrarily

We can educe the modules of characteristic roots of the characteristic equation are all in the circle as shown in Fig.2, and then the system is stable.
4 Simulation
In this work, the object is the same as Ref.[2], minimum phase systems of it is:

Frequency of the signal is 60, 96 and 160 Hz.
In Ref.[2], N1=40 N2=25 N3=15 N=600,K1=K2= K3=0.3, simulation results of origin method are shown in Fig.4.
Simulation results of multi-channel filter repetitive control system are shown in Fig.5.
It can be seen from Fig.4 and Fig.5 that elimination of errors and effect of tracking in the multi-channel filter repetitive control system are better than origin method’s, it is greatly improved stableness and robustness of system.

Fig.4 Simulation results of multi-channel repetitive control system
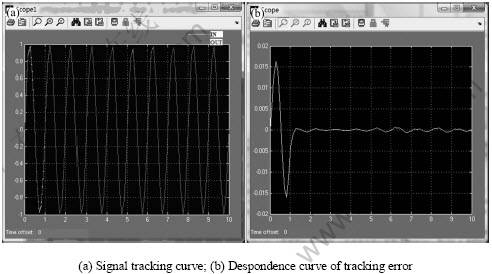
Fig.5 Simulation results of multi-channel filter repetitive control system
5 Conclusions
(1) By calculation and simulation, the multi-channel filter repetitive control system is asymptotic stability and tracks input signal with no errors. So the multi-channel filter repetitive control system has well robustness control function to multi-channel input or perturbation signal, inhibiting errors efficiently.
(2) The method, based on the origin repetitive control method, to be parallel embedded into multiple repetitive control loops with filtering in order to design repetitive controller, has universal significance.
(3) This method can be used into a class of control system with multi-channel input or perturbation signal, to add an augment to method of repetitive control.
References
[1] Nakano M, Yamamoto Y. Repetitive control[M]. Wu min, trans. Changsha: Central South University Press, 1994: 5-10. (in Chinese)
[2] Chang W S, Suh H, Oh J H. Synthesis and analysis of digital-multiple repetitive control systems[C]// Proceedings of the American Control Conference. Philadelphia, Pennsylvania, USA, 1998: 2687-2691.
[3] ZHANG Kai. Waveform correction technique of the CVCF-PWM based on repetitive control theory[D]. Wuhan: Huazhong University of Science & Technology, 2005: 20-25. (in Chinese)
[4] ZHANG Jin-ying. Three phase four legs inverter base on repetitive control and PI double close loop control[D]. Qinhuadao: Yanshan University, 2006: 29-30. (in Chinese)
[5] CHEN Hong. Study on repetitive contro1theory for CVCF inverters[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2003: 35-45. (in Chinese)
[6] WANG Hua-yi. Automatic control theory[M]. Beijing: National Defense Industry Press, 2002: 388-394. (in Chinese)
[7] LIU Jin-kun, Design of robot control system and simulation of MATLAB[M]. Beijing: Tsinghua University Press, 2008: 332-344. (in Chinese)
(Edited by YANG You-ping)
Received date: 2011-04-15; Accepted date: 2011-06-15
Foundation item: Project (N100604003) supported by Fundamental Research Funds for the Central Universities; Project (F10-205-1-57) support by the Foundation of Shenyang, China; Project (2010020176-301) supported by the Science and Technology Planning Project of Liaoning Province, China
Corresponding author: LI Xing(1982-), Doctoral candidate; Tel: +86-18624058345; E-mail: lixing8245@163.com

