
J. Cent. South Univ. (2019) 26: 881-892
DOI: https://doi.org/10.1007/s11771-019-4057-z

Robust sliding mode control for uncertain networked control system with two-channel packet dropouts
ZHANG Yu(��Ԧ)1, REN Li-tong(����ͨ)2, XIE Shou-sheng(л����)1,ZHANG Le-di(���ֵ�)1, ZHOU Bin(�ܱ�)1
1. Aeronautical Engineering Institute, Air Force Engineering University, Xi��an 710038, China;
2. Unit 94314 of Chinese PLA, Zhengzhou 450003, China
 Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2019
Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2019
Abstract: A robust sliding mode control algorithm is developed for a class of networked control system with packet dropouts in both sensor-controller channel and controller-actuator channel, and at the same time mismatched parametric uncertainty and external disturbance are also taken into consideration. A two-level Bernoulli process has been used to describe the packet dropouts existing in both channels. A novel integral sliding surface is proposed, based on which the H�� performance of system sliding mode motion is analyzed. Then the sufficient condition for system stability and robustness is derived in the form of linear matrix inequality (LMI). A sliding mode controller is designed which can guarantee a relatively ideal system dynamic performance and has certain robustness against unknown parameter perturbations and external disturbances. The results from numerical simulations are presented to corroborate the validity of the proposed controller.
Key words: networked control system; sliding mode control; packet dropout; uncertainty
Cite this article as: ZHANG Yu, REN Li-tong, XIE Shou-sheng, ZHANG Le-di, ZHOU Bin. Robust sliding mode control for uncertain networked control system with two-channel packet dropouts [J]. Journal of Central South University, 2019, 26(4): 881�C892. DOI: https://doi.org/10.1007/s11771-019-4057-z.
1 Introduction
With the emergence of networked control systems, where sensors, controllers, and actuators can be viewed as self-contained entities exchanging information over a common communication network, various benefits can be witnessed. However, before the benefits of networked control can be realized in practice, some obstacles must be overcome, and packet dropout remains one of the most crucial problems that cannot be bypassed. Packet dropouts may occur frequently as a result of imperfect communication mechanism or limited network bandwidth [1, 2]. Therefore, to achieve a further progress towards the adoption of networked control in practical systems, the effect of packet dropouts on system stability and performance must be minimized.
It has been extensively reported over the past few years of researches on networked control systems with packet dropouts [3�C6], with two main aspects serving as the focus of most researches, which are system modeling [7] and controller design [8, 9]. In the aspect of system modeling, one of the most commonly used methods is to describe packet dropouts as a random Bernoulli or Markov process [10]. In the aspect of controller design, methods such as H�� control [11], predictive control [12], optimal control [13] and sliding mode control [14] are relatively popular as reported in recent literatures. Among the above-mentioned methods, sliding mode control (SMC) stands out for its strong robustness against uncertainties because during the sliding phase (i.e., when system state reaches a specially designed sliding surface), the motion of system state will be totally independent from the influence of uncertainties [15]. Therefore, the sliding mode controller is designed to drive the system trajectory onto the sliding surface or into its neighborhood in finite time and remains there for all subsequent time. The advantages of SMC make it a fairly suitable choice when designing controllers for uncertain systems. XIONG [16] proposed a sliding mode predictive controller, where the predictive approach was applied to compensating the impact of time delay and packet dropout in the network while SMC was employed to overcome the network induced noise. However, the limitation of their work is also obvious that packet dropouts were equivalently transformed as time delay in their work to simplify the analysis process, which makes it impossible to describe explicitly the relation between system performance and packet dropout parameters such as packet dropout rate and the largest permitted number of packet dropouts. JIA [17] proposed a sliding mode control algorithm for a class of random packet dropout system where a packet dropout compensation strategy was adopted to overcome the impact of state loss and a packet dropout rate dependent integral sliding surface was proposed together with a novel sliding mode controller. A similar controller was applied to tackling the packet dropout problem in a networked control system with Markovian jumping parameters and the sliding mode reaching condition depending on packet dropout rate was given [18]. However, the above mentioned literatures only consider the packet dropouts in sensor-controller channel while the effect of controller-actuator packet dropouts have not been discussed. Actually, packet dropouts in controller-actuator channel are also inevitable and harmful. When packet dropouts occur in controller-actuator channel, which means the latest control signal is lost, zero-input or hold-input strategy [19] will be taken by the actuator as an alternative but it is obvious that such input strategies are not able to provide the most suitable control signals for the system. Therefore, controller-actuator channel and sensor-controller channel packet dropouts can both result in system performance deterioration and instability. But to the authors�� best knowledge, the research still remains open on sliding mode controller design for systems with two-channel packet dropouts. When designing sliding mode controller for networked control systems, it is of great importance to figure out the explicit effect of two-channel packet dropouts on the performance and stability of the closed-loop system and this motives the present study.
In this paper, a robust sliding mode controller is designed for a class of networked control system with two-channel packet dropouts, unknown parameter perturbations and external disturbances. The networked control system model is presented with packet dropouts described as two-level Bernoulli process in both sensor-controller channel and controller-actuator channel, based on which the main contributions of this work are presented 1) a new sliding surface is proposed which can reflect the influence of packet dropouts on system stability; 2) the sliding surface parameter is deduced, which guarantees system asymptotical stability and H�� robustness during the sliding phase; 3) a sliding mode controller is designed that can drive the system trajectory onto the designed sliding surface and maintain the trajectory within its neighborhood for all subsequent time and the effect of parametric uncertainty and external disturbances is also overcome.
The remainder of this article is organized as follows. Section 2 introduces the control system model. Design of the novel sliding surface is presented in Section 3, followed by the design of robust sliding mode controller in Section 4. Numerical simulation results are shown in Section 5. Section 6 presents some conclusions.
2 Problem formulations
The structure of a class of networked control system with two-channel packet dropouts is shown in Figure 1, where time delay is assumed to be small enough to be neglected and the breakers of the two channels represent the condition of packet dropouts. The sensor and the actuator are both time driven, while the controller is event driven. Data are transmitted in single packet and packet disorder will not happen. Then the discrete system model can be described as follows:
 (1)
(1)
where k��0 is the sampling instant, is system state variable;
is system state variable;  is control input; ��A is mismatched system parameter perturbation;
is control input; ��A is mismatched system parameter perturbation;  is external disturbance whose upper bound is known; A, B and D are coefficient matrices with appropriate dimensions. In addition, matrix pair (A, B) is assumed to be controllable and B is a matrix of full column rank, which satisfies rank(B)=m��n. Moreover, all system state variables are measurable.
is external disturbance whose upper bound is known; A, B and D are coefficient matrices with appropriate dimensions. In addition, matrix pair (A, B) is assumed to be controllable and B is a matrix of full column rank, which satisfies rank(B)=m��n. Moreover, all system state variables are measurable.
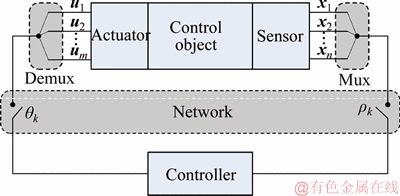
Figure 1 Structure of a class of networked control system
In this paper, system parameter perturbation ��A is mismatched but satisfies:
 (2)
(2)
where  are known constant matrices with appropriate dimensions; matrix F(k) is unknown but satisfies FT(k)F(k)��I. To simplify the expression, F(k) is expressed as F in the following discussions.
are known constant matrices with appropriate dimensions; matrix F(k) is unknown but satisfies FT(k)F(k)��I. To simplify the expression, F(k) is expressed as F in the following discussions.
The packet dropout distribution of the two channels is assumed to obey the two-level Bernoulli random process. Denote  as the sensor signal that reaches the controller and
as the sensor signal that reaches the controller and  as the control signal that reaches the actuator at time instant k. The hold strategy is adopted here as:
as the control signal that reaches the actuator at time instant k. The hold strategy is adopted here as:
 (3)
(3)
where  are parameters used to describe the packet dropout state of the two channels, that is, when ��k=0, it is believed that no packet dropout occurs in the sensor-controller channel; when ��k=1, it represents that the data packet is lost when being transmitted from sensor to controller. Parameter ��k is the counterpart of ��k in controller-actuator channel. The probability distribution of ��k, ��k is
are parameters used to describe the packet dropout state of the two channels, that is, when ��k=0, it is believed that no packet dropout occurs in the sensor-controller channel; when ��k=1, it represents that the data packet is lost when being transmitted from sensor to controller. Parameter ��k is the counterpart of ��k in controller-actuator channel. The probability distribution of ��k, ��k is
 (4)
(4)
where 
 are defined as the packet dropout rates of the two channels, respectively. In this paper, the packet dropout rate is assumed to be a constant value.
are defined as the packet dropout rates of the two channels, respectively. In this paper, the packet dropout rate is assumed to be a constant value.
According to Eq. (3), the system model considering two-channel packet dropouts is described as follows:

 (5)
(5)
Then, a sliding mode controller will be designed for system Eq. (5), which is able to guarantee the asymptotical stability of the closed- loop system despite the existence of packet dropouts in both sensor-controller channel and controller-actuator channel and is robust to uncertainties.
3 Design of robust sliding surface
To suppress the effect of packet dropouts on system stability, a novel integral like sliding surface with packet dropout compensation function is constructed as follows:
 (6)
(6)
where G is the sliding surface parameter matrix to be designed. It is required as a precondition that GB is nonsingular. This condition can be satisfied by defining G=BTP,  because matrix B is assumed to be column full rank. It can be obtained from Eqs.(6) and (1) that,
because matrix B is assumed to be column full rank. It can be obtained from Eqs.(6) and (1) that,

 (7)
(7)
When system state trajectory is driven onto the sliding surface, there is s(k+1)=s(k)=0, and then the equivalent control law for ideal sliding mode motion can be obtained as

 (8)
(8)
where 
 Substituting Eq. (8) into Eq. (1) yields the sliding mode motion equation:
Substituting Eq. (8) into Eq. (1) yields the sliding mode motion equation:
 (9)
(9)
Since packet dropouts are considered, an augmented system state variable is defined as  According to Eqs. (3), (8) and (9), the augmented sliding mode motion equation is obtained as
According to Eqs. (3), (8) and (9), the augmented sliding mode motion equation is obtained as

 (10)
(10)
where 





It can be seen from Eq. (10) that the augmented sliding mode motion will be affected by the packet dropout parameter  and
and  parameter perturbation ��A as well as external disturbance d(k), which means that the system is not invariant upon uncertainties. To solve this problem, the to-be- designed sliding surface parameter G is expected to achieve the following target: when d(k)=0, the augmented sliding mode motion (10) can be mean square asymptotically stable despite the existence
parameter perturbation ��A as well as external disturbance d(k), which means that the system is not invariant upon uncertainties. To solve this problem, the to-be- designed sliding surface parameter G is expected to achieve the following target: when d(k)=0, the augmented sliding mode motion (10) can be mean square asymptotically stable despite the existence
of two-channel packet dropouts; when  and zero initial condition is considered, system (10) will have the H�� performance defined as
and zero initial condition is considered, system (10) will have the H�� performance defined as  where �� is the prescribed H�� performance index.
where �� is the prescribed H�� performance index.
Lemma 1 [20]. For any real vectors a, b and matrix X>0 of appropriate dimensions, the following inequality holds
 (11)
(11)
Lemma 2 [21]. Let H, G and F be real matrices of appropriate dimensions with F satisfying FTF��I. Then for arbitrary scalar ��>0, we have
HFG+GTFTHT�ܦ�HHT+���C1GTG (12)
Theorem 1. For the networked control system (1) with packet dropout model (5), sliding surface (6) is adopted. Then for the prescribed positive constant ��, the augmented sliding mode motion (10) is asymptotically stable with a noise attenuation level �� upon the external disturbance d(k), if there exist symmetric positive definite matrix P and scalar ��>0 satisfying the following linear matrix inequality (LMI):
 (13)
(13)
where 






Thus, the sliding surface parameter matrix can be obtained as G=BTP.
Proof: Define the Lyapunov function as
 (14)
(14)
Along the trajectory of system (10), we have,

 (15)
(15)
Choose


 ��, ��>0, and then it follows from the definition of �� and
��, ��>0, and then it follows from the definition of �� and  that:
that:


 (16)
(16)
It follows from Eqs. (15) and (16) that:



 (17)
(17)
Define  then we have
then we have

 (18)
(18)
According to Eq. (10) and Lemma 1, there is
 (19)
(19)
where ,
, ,
, ,
,
 .
.
In the same way, it is obtained that:
 (20)
(20)
where 

Substituting Eq. (19) and Eq. (20) into Eq. (18), yields the following inequality according to Schur��s complement,

 (21)
(21)
where 
It can be obtained from Eq. (21) that when ��<0, there is
 (22)
(22)
It is deduced from Lemma 2 that Eq. (21) holds if and only if there exists a scalar ��>0 satisfying


 (23)
(23)
where
According to Schur��s complement, Eq. (23) is equivalent to Eq. (13), which makes Eq. (22) hold. Then when  it can be obtained by summing both sides of Eq. (22) from 0 to �� that
it can be obtained by summing both sides of Eq. (22) from 0 to �� that
 (24)
(24)
that is,
 (25)
(25)
Thus it is concluded that the sliding mode motion Eq. (10) is asymptotically mean square stable, while the prescribed noise attenuation level �� is achieved.
Remark 1. Here it can be seen that the effect of two-channel packet dropouts on networked control system can be reflected by the packet dropout parameter 
 and their coupling parameters, such as ��, ��, ��1, ��2, etc. Additionally, the introduction of packet dropout compensation terms
and their coupling parameters, such as ��, ��, ��1, ��2, etc. Additionally, the introduction of packet dropout compensation terms  and
and  enables the designed sliding surface parameter G to be robust against the two-channel packet dropouts.
enables the designed sliding surface parameter G to be robust against the two-channel packet dropouts.
Corollary. It is noticed that Theorem 1 is presented as a feasible solution for the two-channel packet dropout problem considered in this paper. In order to illustrate the system performance under different packet dropout condition, the H�� index �� can be assumed to be an unknown value, and then the feasibility problem Eq. (13) will be converted into the following minimization problem:
 (26)
(26)
Solving problem (26) yields the distribution of largest tolerated packet dropout rates in the two channels.
4 Design of reaching law based sliding mode controller
Ideally, system state is expected to be driven precisely onto the sliding surface, and then maintain s(k+1)=s(k)=0, so that the system state can ��slide�� smoothly on the sliding surface until it reaches the equilibrium point. However, on one hand, for discrete systems, it is scarcely possible to get a positive integer to make exactly s(x(k))=0. So system state can only be driven into a neighborhood of the sliding surface. On the other hand, the existence of packet dropouts and uncertainties further degrades system dynamic performance, which makes it fairly important to design a controller that can guarantee a relatively ideal system dynamic performance despite the existence of packet dropouts and uncertainties.
It can be seen that there are unknown uncertainty terms  and
and  in Eq. (7) that must be compensated during the design of controller to achieve a relatively ideal reaching phase performance. A sliding mode controller is thus proposed here based on the uncertainty upper bound.
in Eq. (7) that must be compensated during the design of controller to achieve a relatively ideal reaching phase performance. A sliding mode controller is thus proposed here based on the uncertainty upper bound.
Define
 and then it is obtained according to Eq.(2) and the bound of external disturbance d(k) that the following inequality holds,
and then it is obtained according to Eq.(2) and the bound of external disturbance d(k) that the following inequality holds,
 (27)
(27)
with


 ��dmax=
��dmax=  and
and  being the upper bound vector of the external disturbance.Furthermore, we define
being the upper bound vector of the external disturbance.Furthermore, we define 



 with
with  and
and  being the corresponding elements of vectors
being the corresponding elements of vectors  and
and  respectively. Then the sliding mode controller is proposed based on the exponential reaching law [22]:
respectively. Then the sliding mode controller is proposed based on the exponential reaching law [22]:


 (28)
(28)
where T is the system sampling period;  and
and  are coefficient matrices of the reaching law. It must be satisfied that ei>0, qi>0 and 1�CqiT>0 (i=1, 2, ��, m) when designing the controller. In addition,
are coefficient matrices of the reaching law. It must be satisfied that ei>0, qi>0 and 1�CqiT>0 (i=1, 2, ��, m) when designing the controller. In addition,  is a specially designed term to compensate the effect of parameter perturbation and external disturbance so that the performance of the closed-loop system can be guaranteed.
is a specially designed term to compensate the effect of parameter perturbation and external disturbance so that the performance of the closed-loop system can be guaranteed.
Theorem 2. For the networked control system Eq.(1) with packet dropout model Eq. (5), the sliding mode control law Eq. (28) is adopted. Then the system trajectory can be driven onto the designed sliding surface Eq. (6) in finite time and stay in a reasonable neighborhood of it for all subsequent time.
Proof: It follows from Eqs. (1), (3) and (7) that

 (29)
(29)
Then it can be obtained from formula (27) that
 (30)
(30)
Substituting formula (30) into Eq. (29), yields:
 (31)
(31)
Therefore, the reaching condition is satisfied, which means that system (1) will be driven onto the sliding surface and stay there for all subsequent time.
5 Simulation results and analysis
Consider the following uncertain system in the form of Eq.(1):

 .
.
Subsequently, the parameters for packet dropouts, parameter perturbation and external disturbance are illustrated as



The specific quantitative settings of the three above-mentioned uncertainties are given as follows:
1) Two-channel random packet dropouts
The packet dropout rates of the sensor- controller channel and controller-actuator channel are  and
and  respectively.
respectively.
2) System parameter perturbation
According to Eq. (2), define F(k)=sin(k��T), with T being the system sampling period and here it is given that T=0.02 s. It is obvious that FT(k)F(k)��I.
3) External disturbance
Define
 (32)
(32)
where is the Gaussian white noise;
is the Gaussian white noise;  is the upper bound of noise intensity and here we define Ni=0.1, i=1, 2, 3.
is the upper bound of noise intensity and here we define Ni=0.1, i=1, 2, 3.
It is given that ��=0.68, then according to Theorem 1, the sliding surface parameter matrix can be obtained by solving LMI (13), that is  , ��=0.4888.
, ��=0.4888.
Then it follows from formula (26) that  and
and 
Furthermore, it is obtained that 
In the same way, we have 

The reaching law parameters are defined as ei=0.2 and qi=10 (i=1, 2).
To verify the robustness of the proposed sliding surface, a sliding surface designed based on pole assignment method [23] is introduced as a comparison. Then, for the reduced order normal form of system (9), the pole assignment method based coefficient matrix is calculated as

with expected pole as ��g=�C1. Leave the other parameters remaining the same as the proposed controller and substitute Gp into Eq. (28), the first contrastive controller can be obtained, which is denoted as P-RSMC (pole-assignment based reaching law sliding mode controller). Meanwhile, another contrastive controller is introduced to reflect the advantage of the proposed controller in dynamic performance. Compared with the proposed controller given by Eq. (28), the control law of the second contrastive controller does not have the uncertainty compensation term 
 and we denote the second contrastive controller as RSMC (reaching law sliding mode controller). Then, for the easiness of presentation, the proposed controller given by Eq. (28) is denoted as UR-RSMC (uncertainty bound based robust reaching law sliding mode controller).
and we denote the second contrastive controller as RSMC (reaching law sliding mode controller). Then, for the easiness of presentation, the proposed controller given by Eq. (28) is denoted as UR-RSMC (uncertainty bound based robust reaching law sliding mode controller).
The initial system state is chosen as  and the simulation results are shown in Figures 2�C4. It can be seen that the system with the proposed controller has better dynamic performance and smaller steady state error than those with the two contrastive controllers. In addition, the system with the proposed controller presents a shorter convergence time with the sliding mode motion being achieved in 0.6 s. In contrast, system with RSMC shows a longer settling time. It takes the system 1.1 s to reach the sliding mode motion state, the reason of which can be explained as follows: the absence of uncertainty compensation term limits RSMC��s ability to suppress the effect of parameter perturbation and external disturbance during the reaching phase, which leads to the falling of convergence speed. However, since the same robust sliding surface has been adapted, RSMC shares a same error level with UR-RSMC. Compared with the first two controllers, P-RSMC shows obvious disadvantage in steady state error both for state variable x(k) and switching function s(k), the reason of which can be explained as follows: the pole assignment method is conducted on the nominal system without parameter perturbation and external disturbance, thus the obtained sliding surface parameter cannot guarantee a small steady state error when uncertainties exist.
and the simulation results are shown in Figures 2�C4. It can be seen that the system with the proposed controller has better dynamic performance and smaller steady state error than those with the two contrastive controllers. In addition, the system with the proposed controller presents a shorter convergence time with the sliding mode motion being achieved in 0.6 s. In contrast, system with RSMC shows a longer settling time. It takes the system 1.1 s to reach the sliding mode motion state, the reason of which can be explained as follows: the absence of uncertainty compensation term limits RSMC��s ability to suppress the effect of parameter perturbation and external disturbance during the reaching phase, which leads to the falling of convergence speed. However, since the same robust sliding surface has been adapted, RSMC shares a same error level with UR-RSMC. Compared with the first two controllers, P-RSMC shows obvious disadvantage in steady state error both for state variable x(k) and switching function s(k), the reason of which can be explained as follows: the pole assignment method is conducted on the nominal system without parameter perturbation and external disturbance, thus the obtained sliding surface parameter cannot guarantee a small steady state error when uncertainties exist.
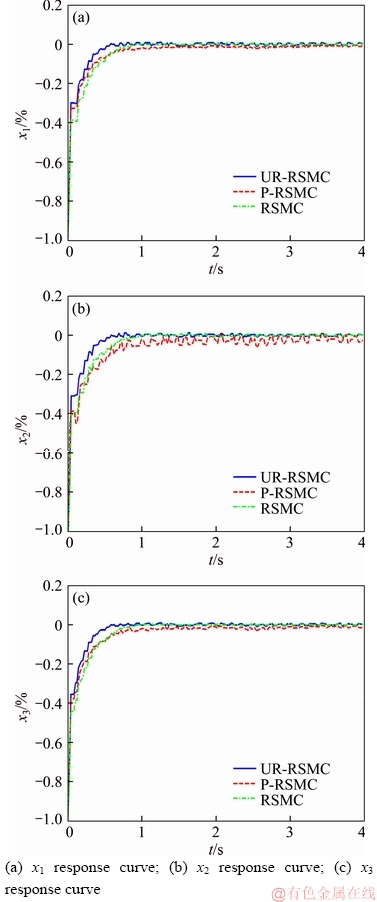
Figure 2 Response curves of system state variables:
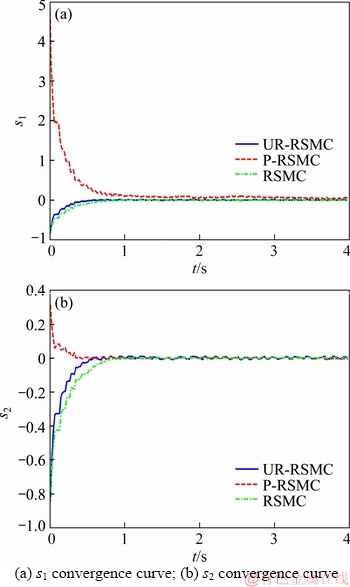
Figure 3 Convergence curves of switching function s(k):
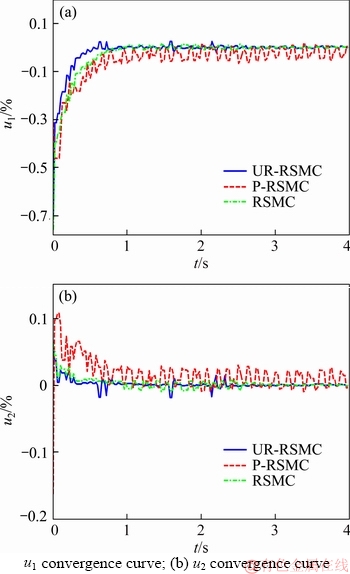
Figure 4 Convergence curves of control input u(k):
In this paper, it is assumed that data are transmitted in single packet, which means the information of one variable will be transmitted through one single data packet without separation, so in other words, when packet dropout occurs, the sensor or controller information of this time instant is lost entirely. Therefore, when system suffers from a high packet dropout rate, consecutive packet dropouts will occur which will severely worsen the control effectiveness. Considering such condition, the packet dropout rate is redefined as  then the system packet dropout situation is presented in Figure 5, where �� is the packet dropout description value. It can be seen that higher packet dropout rate results in severer consecutive packet dropout. In Figure 6, the system state response is given under the packet dropout condition
then the system packet dropout situation is presented in Figure 5, where �� is the packet dropout description value. It can be seen that higher packet dropout rate results in severer consecutive packet dropout. In Figure 6, the system state response is given under the packet dropout condition A certain degree of performance degradation can be witnessed but system��s robustness to uncertainties is still maintained, which verifies that the proposed method is suitable for the situation of consecutive packet dropouts.
A certain degree of performance degradation can be witnessed but system��s robustness to uncertainties is still maintained, which verifies that the proposed method is suitable for the situation of consecutive packet dropouts.
In order to obtain the maximum permissive packet dropout rate, LMI Eq. (26) is solved iteratively following the change of and and the change curve of optimal H�� performance index  is shown in Figure 7. It is seen that the higher packet the dropout rate, the bigger the value of
is shown in Figure 7. It is seen that the higher packet the dropout rate, the bigger the value of  which leads to a worse robustness. When the packet dropout rate increases to an extremely high level, the optimal solution of LMI (26) does not exist. Therefore, Figure 7 can reflect the distribution of the maximum permissive packet dropout rate.
which leads to a worse robustness. When the packet dropout rate increases to an extremely high level, the optimal solution of LMI (26) does not exist. Therefore, Figure 7 can reflect the distribution of the maximum permissive packet dropout rate.
6 Conclusions
A robust sliding mode control algorithm is developed for a class of uncertain networked control system with packet dropouts in both sensor-controller channel and controller-actuator channel. The following conclusions are obtained:
1) A robust sliding surface is proposed which is proved to have better robustness against two- channel packet dropouts, parameter perturbation, and external disturbances, thus the robustness of the system sliding mode motion can be well guaranteed.
2) A sliding mode controller with uncertainty compensation term is proposed, through which the influence of uncertainties on system reaching phase is effectively restrained, resulting in a favorable system dynamic performance.

Figure 5 Packet dropout distribution under different packet dropout rates:
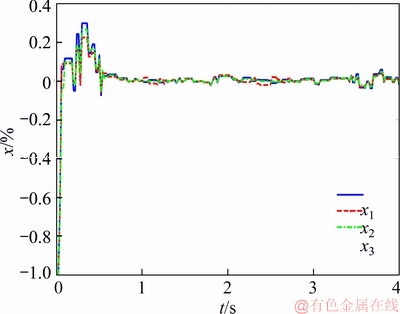
Figure 6 Response curves of system state variables when 
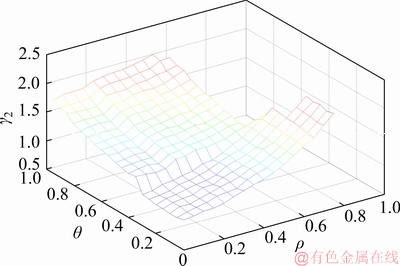
Figure 7 Changing curve of optimal H�� performance index
3) When packet dropout rate increases, consecutive packet dropout will occur more frequently, thus the dynamic and steady state performance of the closed-loop system will be affected to a certain degree. However, as long as Theorem 1 is solvable, the robustness of the closed-loop system can still be guaranteed, which illustrates the validity of the proposed method.
References
[1] QI Qing-yuan, ZHANG Huan-shui. Output feedback control and stabilization for networked control systems with packet losses [J]. IEEE Transactions on Cybernetics, 2017, 47(8): 2223�C2234.
[2] YAN Jing-jing, XIA Yuan-qing. Quantized control for networked control systems with packet dropout and unknown disturbances [J]. Information Sciences, 2016, 354: 86�C100.
[3] PANG Zhong-hua, LIU Guo-ping, ZHOU Dong-hua, SUN De-hui. Data-based predictive control for networked nonlinear systems with packet dropout and measurement noise [J]. Journal of System Science and Complexity, 2017, 30: 1072�C1083.
[4] SHEN Dong, ZHANG Chao, XU Yun. Two updating schemes of iterative learning control for networked control systems with random data dropouts [J]. Information Sciences, 2017, 381: 352�C370.
[5] JIANG Xiao-wei, ZHANG He-xian, GUAN Zhi-hong, YU Li, YAN Huai-cheng. Performance limitations of networked control systems with quantization and packet dropouts [J]. ISA Transactions, 2017, 67: 98�C106.
[6] SONG Jiang-peng, ZHOU Di, SUN Guang-li, QI Zhi-hui. Robust control with compensation of adaptive model for dual-stage inertially stabilized platform [J]. Journal of Central South University, 2018, 25(11): 2615�C2625.
[7] YANG Hong-jiu, XU Yang, ZHANG Jin-hui. Event-driven control for networked control systems with quantization and markov packet losses [J]. IEEE Transactions on Cybernetics, 2017, 47(8): 2235�C2243.
[8] CHEN Hai-fei, GAO Jin-feng, SHI Ting, LU Ren-quan. H�� control for networked control systems with time delay, data packet dropout and disorder [J]. Neurocomputing, 2016, 179: 211�C218.
[9] TANG Z E, PARK J H, LEE T H. Dynamic output-feedback-based H�� design for networked control systems with multipath packet dropouts [J]. Applied Mathematics and Computation, 2016, 275: 121�C133.
[10] SAKTHIVEL R, SANTRA S, MATHIYALAGAN K, ANTHONI S M. Observer-based control for switched networked control systems with missing data J]. International Journal of Machine Learning and Cybernatics, 2015, 6: 677�C686.
[11] HUA Chang-chun, YU Shao-chong, GUAN Xin-ping. A robust H�� control approach for a class of networked control systems with sampling jitter and packet-dropout [J]. International Journal of Control, Automation, and Systems, 2014, 12(4): 759�C768.
[12] LI Zhi-jun, SUN De-hui, SHI Yun-tao, WANG Li-feng. A stabilizing model predictive control for networked control system with data packet dropout [J]. Journal of Control Theory and Applications, 2009, 7(3): 281�C284.
[13] GAO Shou-wan, TANG Gong-you. Stochastic optimal control of networked control systems with control packet dropouts [J]. Journal of Control Theory and Applications, 2012, 10(3): 410�C414.
[14] LIAN Bo-sen, ZHANG Qing-ling, LI Jin-na. Sliding mode control for non-linear networked control systems subject to packet disordering via prediction method [J]. IET Control Theory Applications, 2017, 11(17): 3079�C3088.
[15] REN Li-tong, XIE Shou-sheng, MIAO Zhuo-guang, TIAN Hu-sen, PENG Jing-bo. Fuzzy robust sliding mode control of a class of uncertain systems [J]. Journal of Central South University, 2016, 23(9): 2296-2304.
[16] XIONG Yuan-sheng, YU Li, YU Shi-ming. Sliding mode multiple steps predictive control for networked control systems [J]. Control Theory and Applications, 2005, 22(2): 301�C306.
[17] JIA Ting-gang, NIU Yu-gang, ZOU Yuan-yuan. Sliding mode control for stochastic systems subject to packet losses [J]. Information Sciences, 2012, 217: 117�C126.
[18] CHEN Bei, NIU Yu-gang, ZOU Yuan-yuan. Sliding mode control for networked systems with markovian jumping parameters [C]// Proceedings of the 12th International Conference on Control, Automation, Robotics & Vision. Guangzhou: IEEE, 2012: 1495�C1500.
[19] ZHAN Xi-sheng, WU Jie, JIANG Tao, JIANG Xiao-wei. Optimal performance of networked control systems under the packet dropouts and channel noise [J]. ISA Transactions, 2015, 58: 214�C221.
[20] CHEN Bei, NIU Yu-gang, ZOU Yuan-yuan. Sliding mode control for stochastic markovian jumping systems subject to successive packet losses [J]. Journal of the Franklin Institute, 2015, 351: 2169�C2184.
[21] GUAN Xin-ping, DAI Shuang-feng, LONG Cheng-nian. Controller design for networked control system with data packet dropout and transmission delays [J]. Journal of Control Theory and Applications, 2007, 5(3): 227�C232.
[22] HU Jun, WANG Zi-dong, GAO Hui-jun. Robust H�� sliding mode control for discrete time-delay systems with stochastic nonlinearities [J]. Journal of the Franklin Institute, 2012, 349: 1459�C1479.
[23] KHANDEKAR A A, MALWATKAR G M, PATRE B M. Discrete sliding mode control for robust tracking of higher order delay time systems with experimental application [J]. ISA Transactions, 2013, 52: 36�C44.
(Edited by HE Yun-bin)
���ĵ���
����˫ͨ�������IJ�ȷ���������ϵͳ³����ģ����
ժҪ�����һ��ͬʱ���ڴ�����-�������Լ�������-ִ�����������������ϵͳ�������һ��³����ģ�����㷨�����ȣ��������Bernoulli��ģ���������˶���ϵͳģ�͡��ڴ˻����������һ�־��ж����������³����ģ�棬�Լ����ڸ����Ͻ�������ʻ�ģ����������Ӧ��Lyapunov�ȶ��Է���������������ϵͳ����ģ̬���ȶ����Լ��������ĵ�������������������������ƵĿ������ܹ���Ч����˫ͨ�����ݶ�����ϵͳ���ܵ�Ӱ�죬ͬʱ�Է�ƥ�䲻ȷ���Ժ��ⲿ���ž������õ�³���ԡ�
�ؼ��ʣ��������ϵͳ����ģ���ƣ����ݶ�������ȷ����
Foundation item: Projects(51476187, 51506221, 51606219) supported by the National Natural Science Foundation of China
Received date: 2017-12-13; Accepted date: 2018-09-20
Corresponding author: ZHANG Yu, PhD; Tel: +86-13325382530; E-mail: frank_sharon1314@126.com; ORCID: 0000-0001-6609- 583X

