Adaptive fuzzy integral sliding mode pressure control for cutter feeding system of trench cutter
来源期刊:中南大学学报(英文版)2016年第12期
论文作者:魏建华 田启岩 方锦辉 国凯
文章页码:3302 - 3311
Key words:electro-hydraulic system; cutter feeding system; feeding pressure control; adaptive fuzzy integral sliding mode control
Abstract: A nonlinear pressure controller was presented to track desired feeding pressure for the cutter feeding system (CFS) of trench cutter (TC) in the presence of unknown external disturbances. The feeding pressure control of CFS is subjected to unknown load characteristics of rock or soil; in addition, the geological condition is time-varying. Due to the complex load characteristics of rock or soil, the feeding velocity of TC is related to geological conditions. What is worse, its dynamic model is subjected to uncertainties and its function is unknown. To deal with the particular characteristics of CFS, a novel adaptive fuzzy integral sliding mode control (AFISMC) was designed for feeding pressure control of CFS, which combines the robust characteristics of an integral sliding mode controller and the adaptive adjusting characteristics of an adaptive fuzzy controller. The AFISMC feeding pressure controller is synthesized using the backstepping technique. The stability of the overall closed-loop system consisting of the adaptive fuzzy inference system, integral sliding mode controller and the cutter feeding system is proved using Lyapunov theory. Experiments are conducted on a TC test bench with the AFISMC under different operating conditions. The experimental results demonstrate that the proposed AFISMC feeding pressure controller for CFS gives a superior and robust pressure tracking performance with maximum pressure tracking error within ±0.3 MPa.
J. Cent. South Univ. (2016) 23: 3302-3311
DOI: 10.1007/s11771-016-3396-2

TIAN Qi-yan(田启岩), WEI Jian-hua(魏建华), FANG Jin-hui(方锦辉), GUO Kai(国凯)
State Key Laboratory of Fluid Power Transmission and Control, Zhejiang University, Hangzhou 310027, China
 Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Abstract: A nonlinear pressure controller was presented to track desired feeding pressure for the cutter feeding system (CFS) of trench cutter (TC) in the presence of unknown external disturbances. The feeding pressure control of CFS is subjected to unknown load characteristics of rock or soil; in addition, the geological condition is time-varying. Due to the complex load characteristics of rock or soil, the feeding velocity of TC is related to geological conditions. What is worse, its dynamic model is subjected to uncertainties and its function is unknown. To deal with the particular characteristics of CFS, a novel adaptive fuzzy integral sliding mode control (AFISMC) was designed for feeding pressure control of CFS, which combines the robust characteristics of an integral sliding mode controller and the adaptive adjusting characteristics of an adaptive fuzzy controller. The AFISMC feeding pressure controller is synthesized using the backstepping technique. The stability of the overall closed-loop system consisting of the adaptive fuzzy inference system, integral sliding mode controller and the cutter feeding system is proved using Lyapunov theory. Experiments are conducted on a TC test bench with the AFISMC under different operating conditions. The experimental results demonstrate that the proposed AFISMC feeding pressure controller for CFS gives a superior and robust pressure tracking performance with maximum pressure tracking error within ±0.3 MPa.
Key words: electro-hydraulic system; cutter feeding system; feeding pressure control; adaptive fuzzy integral sliding mode control
1 Introduction
Development of the diaphragm walling technique has changed civil engineering significantly with the introduction of the trench cutter technology. The trench cutter (TC) is the most advanced construction machinery for the diaphragm wall now. The cutter feeding system (CFS) driven by hydraulic motors provides the cutter feeding motion and is a critical part of TC. The trench cutter feeding force control is of great importance in the operating process to ensure the construction efficiency and safety, but it is subjected to unknown load characteristics and varying geological conditions, which makes the pressure control an intricate problem.
Force or pressure tracking control of hydraulic actuators has drawn great attention for last few decades and various controllers have been adopted. PID controllers with model based compensation were widely used in industrial applications [1]. Feedback linearization was used to synthesize a differential pressure controller for a rotational hydraulic drive [2]. Several robust controllers treat the actuator movement as a disturbance [3-4]. TRUONG and AHN [5] designed a fuzzy self-tuning PID controller to obtain robust force control performance. Sliding mode control was used to compensate for disturbances in electro-hydraulic systems [6-7]. A cascaded sliding-mode control scheme was presented for a pneumatic linear axis [8]. However, the chattering in the control signal due to the sliding mode controller can easily excite high frequency chattering in the control signal and degrade the system performance. The introduction of the boundary layer [9-10] around the sliding surface can alleviate the chattering problem at the expense of tracking performance. A combination of the input-output linearization technique with the integral sliding mode was employed for load pressure control of die-cushion cylinder drive [11]. An adaptive controller was proposed to automatically adjust the controller parameters and has been proven to be a valid method to parameter uncertainties [12]. A Lyapunov based controller relying on an accurate model of the system was designed for force tracking control of an electro- hydraulic actuator [13]. WANG et al [14] developed a high performance nonlinear adaptive control method for electro-hydraulic load simulator in the presence of actuator’s active motion disturbance, flow nonlinear and parametric uncertainties. Recently, the disturbance observer based control has been widely used for system plants subject to disturbances and uncertainties due to its faster response in handling the disturbances [15-16]. A nonlinear controller including a disturbance observer, a nonlinear feedforward controller and a feedback controller was designed to improve the supply pressure tracking performance of the hydraulic pump in the presence of unknown time-varying load flow disturbances [17].
In most aforementioned papers, it is common to pay attentions to the points of uncertain nonlinearities and parametric uncertainties using model based control algorithms. However, due to the complex load characteristics of rock or soil, the feeding velocity of TC is related to geological conditions, cutting velocity, etc. What is worse, its dynamic model is subjected to uncertainties and its function is unknown, thus making the aforementioned control algorithms which need an explicit mathematical model not suitable for the feeding pressure control of CFS. Moreover, the feeding velocity cannot be measured on the actual equipment, therefore, the actuator movement is a great disturbance for the pressure control. This will severely affect the feeding pressure tracking performance and robustness of CFS. Fuzzy logic is an intelligent control method which behaves like humans and is independent of plant model [18]. The model free fuzzy control approach has been widely used in electro-hydraulic servo systems [19]. However, the fuzzy rules have to be adjusted through trial and error, which is a time consuming procedure. Therefore, adaptive fuzzy control [20-21] has been proposed to adjust the fuzzy sets and better control performance has achieved.
In this work, an adaptive fuzzy integral sliding mode controller is proposed for feeding pressure control of CFS in which the robust characteristics of an integral sliding mode control and the adaptive adjusting characteristics of an adaptive fuzzy control are combined. The AFISMC feeding pressure controller is synthesized using backstepping technique. The stability of the overall closed-loop system consisting of the adaptive fuzzy inference system, integral sliding mode controller and the cutter feeding system is proved using Lyapunov theory.
The rest of the paper is organized as follows. Section 2 presents the controlled plant and its mathematical model. Section 3 designs the adaptive fuzzy integral sliding mode control (AFISMC) feeding pressure controller for CFS. In section 4, experiments are conducted on a TC test bench under different operating conditions with different controllers and the experimental results are presented. Finally, Section 5 shows the conclusions.
2 Architecture and mathematical model
2.1 System architecture
The CFS is shown schematically in Fig. 1. The configuration of CFS, including hydraulic motor, servo valve, flow control valve, coupling shaft and winch system, is built by the integration of hydraulic components and mechanical apparatus. A servo valve with position feedback is employed to control the feeding pressure of CFS.
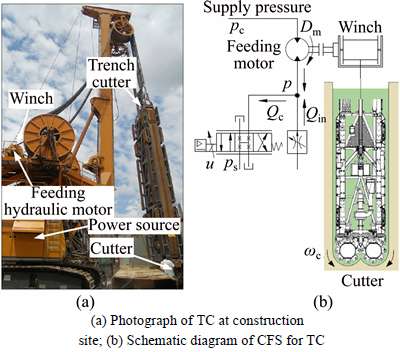
Fig. 1 Architecture of TC:
The feeding pressure control of CFS is subjected to the unknown load characteristics of rock or soil, in addition, the geological condition is time-varying. Due to the complex load characteristics of rock or soil, the feeding velocity of TC is related to geological conditions, cutting velocity of cutter and feeding pressure. What is worse, its dynamic model is subjected to uncertainties and its function is unknown. All these particular characteristics of CFS present great challenge for feeding pressure controller design.
2.2 Mathematical model
The pressure dynamics of the chamber between the hydraulic motor and the servo valve can be written as [22]
 (1)
(1)
where p is the controlled feeding pressure; Qin is the inlet flow rate to the chamber through the flow control valve; V is the initial control volume of the chamber; βe is the effective hydraulic fluid bulk modulus; ωc is the cutting velocity of cutter; pc is the supply pressure of the feeding motor; f (p, ωc, pc) is the outlet flow rate of feeding motor. Due to the complex load characteristics of rock or soil, the outlet flow rate of feeding motor is related to geological conditions, cutting velocity and pressure difference, but the nonlinear functional relationships among them is unknown. Qc is the output flow rate of the chamber through the servo valve. The servo valve orifices are assumed matched and symmetrical so that the valve flow Qc is modeled by
 (2)
(2)
where ps is the supply pressure of the servo valve; kq is the servo valve flow gain; and xv is the servo valve spool displacement.
Because the dynamics of the servo valve is much higher than that of the whole system, the servo valve can be modeled as a first order model given by
 (3)
(3)
where τv is the time constant; u is control input voltage; and kv is the servo valve gain.
Define the system state variables as x=[x1, x2]T=[p, xv]T. The whole system can be written as
 (4)
(4)
where
 (5)
(5)
3 Controller design
Given the desired pressure reference x1d (t), the goal of controller is to guarantee that the output can track the desired trajectory as closely as possible in the presence of unknown disturbance. Using the backstepping technique, the controller is shown as follows.
Step 1: Define the tracking error as  then an integral sliding surface s1 is defined in the form
then an integral sliding surface s1 is defined in the form
 (6)
(6)
where λ is positive constant. Since decreasing  is the same as decreasing s1, so the rest of the work is to make s1 as small as possible. The time derivative of s1 along the system can be written as
is the same as decreasing s1, so the rest of the work is to make s1 as small as possible. The time derivative of s1 along the system can be written as

 (7)
(7)
However, f is an unknown nonlinear function, so the ideal control law cannot be implemented. Fuzzy control intimating the human logic thinking is independent of the plant model, which is suitable for this system. Here, an on-line tuning fuzzy system through an adaptive mechanism is designed.
In the fuzzy controller, a product inference engine, singleton fuzzification and center average defuzzification are employed. Here, the input membership functions ought to be at least twice continuously differentiable to use the backstepping technique. In addition, the membership function should be as simple as possible to ease implementation. Therefore, as shown in Fig. 2, we design a novel membership function which is twice continuously differentiable for the two input variables.
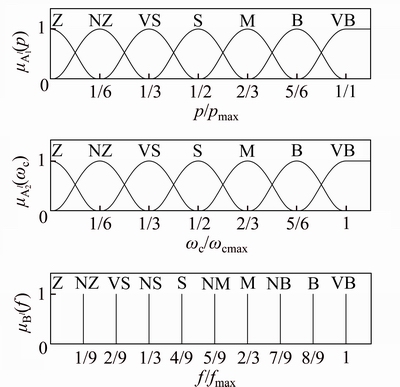
Fig. 2 Fuzzy sets and membership functions (Z: zero; NZ: near zero; VS: very small; S: small; M: middle; B: big; VB: very big)
The twice continuously differentiable function of the two input variables is expressed as follows:
 (8)
(8)
where  is the membership function value of the
is the membership function value of the
input variables; i=1, …, m denotes the fuzzy rule number; k=1, 2 denotes the input variable number; j=1, …, n denotes the input variable membership function number;  and
and  are respectively the width and center of the membership functions of the controlled feeding pressure and the cutting velocity.
are respectively the width and center of the membership functions of the controlled feeding pressure and the cutting velocity.
The rules describing the fuzzy system are shown in Table 1. The knowledge base for the fuzzy system comprises a set of fuzzy If-Then rules in which the ith rule is shown as

where  and
and  are linguistic values of the controlled feeding pressure and the cutting velocity respectively; θi is the fuzzy system output of rule R(i).
are linguistic values of the controlled feeding pressure and the cutting velocity respectively; θi is the fuzzy system output of rule R(i).
Table 1 Rule base for fuzzy logic system

The fuzzy system output value is given as
 (9)
(9)
Therefore, the fuzzy system output can be expressed as regression models:
 (10)
(10)
where α=[α1, …, αm]T is a regressive vector defined as follows and θ=[θ1, …, θm]T is the unknown parameter.
 (11)
(11)
In accordance with the universal approximation theory, an optimal fuzzy system exists in the following form expressed as
 (12)
(12)
where ε is the approximation error and satisfies  where E is a positive constant. In fact, the approximated fuzzy system
where E is a positive constant. In fact, the approximated fuzzy system  is used in the controller. Therefore, the error is shown as
is used in the controller. Therefore, the error is shown as
 (13)
(13)
A virtual controller x2d for x2 is shown as

 (14)
(14)
where k11 is a positive constant, is the bound estimation and ucomp is used to compensate the difference between the real nonlinear function f and
is the bound estimation and ucomp is used to compensate the difference between the real nonlinear function f and  and it is the reaching part of sliding mode control. Here, we use a smooth signum function to obtain the twice differentiable smooth saturation ucomp facilitating calculation given by
and it is the reaching part of sliding mode control. Here, we use a smooth signum function to obtain the twice differentiable smooth saturation ucomp facilitating calculation given by
 (15)
(15)
where Φ is the sliding surface boundary layer width.
Let  denote the tracking error of the servo valve spool displacement, substituting Eq. (14) into Eq. (7), we get the time derivative of s1 as
denote the tracking error of the servo valve spool displacement, substituting Eq. (14) into Eq. (7), we get the time derivative of s1 as
 (16)
(16)
Define  and we can get
and we can get
 (17)
(17)
The properties of the function s1Δ are used to cease adaptation when the boundary layer is reached and to avoid unbounded increase.
A Lyapunov function is defined as
 (18)
(18)
where η11 and η12 are positive constants.
The time derivative of V1 is written as
 (19)
(19)
Thus, if  then
then  it follows V1=0. If
it follows V1=0. If  then
then  By substituting Eq. (16) into Eq. (19) we can obtain:
By substituting Eq. (16) into Eq. (19) we can obtain:

 (20)
(20)
The adaptive laws are chosen as
 (21)
(21)
Thus, Eq. (20) can be rewritten as

 (22)
(22)
Step 2: In this step, the actual control input u is determined. The time derivative of s2 can be written as
 (23)
(23)
Define the Lyapunov function as
 (24)
(24)
where η21 is a positive constant.
Differentiate Eq. (24) with respect to time as
 (25)
(25)
By substituting Eq. (23) into Eq. (25) we can get

 (26)
(26)
Then the control law can be expressed as
 (27)
(27)
Thus, Eq. (26) can be rewritten as

 (28)
(28)
Therefore, if then  and
and  Else if then
Else if then  and
and  0, it follows
0, it follows
The stability of the overall closed-loop system, consisting of the controller and the adaptive fuzzy system, is guaranteed, and all the signals involved in the system are proved to be bounded. The block diagram of the whole system is shown in Fig. 3.
4 Experiment verification
4.1 Test bench setup
In this section, experiments are carried out to verify the effectiveness of the proposed controller. The experimental installation is presented in Fig. 4. The structure of the test rig is shown in Fig. 5. In general, the experiment is mainly composed of the feeding pressure control system (FPCS) and the load generating system (LGS). In the test bench, the feeding motor of which the displacement is 2.55×10-6 m3/rad is controlled by a servo valve with position feedback whose bandwidth is above 100 Hz. The supply pressure pc is set at 1.5 MPa. The other servo valve controlled loading motor is used to simulate load acting on the feeding motor and generates velocity disturbance in the motor feeding pressure control process. The pressures of the test system are measured by pressure sensors and the angular velocity of the hydraulic motors is obtained by differentiating of the angular signal which is measured by the angle encoder. A compatible PC including a 16-bit multi-function data acquisition and control card is used to acquire the sensor signals and generate control signals to the servo valves. The feeding pressure controller and the load generating controller are both implemented in the MATLAB/xPC target environment and the sampling time is 1 ms.
4.2 Experimental results
First of all, we focus on the feeding pressure tracking control of CFS in four different geological conditions: soil, hard soil, limestone and granite. To evaluate the control performance of AFISMC for the system, we employ sinusoidal pressure reference with two control schemes, the AFISMC and the conventional PI controller. The desired pressure tracking trajectory of the two controllers is a sinusoidal signal with amplitude of 5 MPa and frequency of 0.1 Hz. The PI gains are determined by trial and error on the basis of a compromise between the tracking performance and robustness and are used in the following four different geological conditions:
 (29)
(29)
Due to the unknown bound of disturbance, it increases the complexity to calculate a feedback gain of the reaching controller to ensure the theoretical rigor. As an alternative, a pragmatic approach is to simply choose a large enough feedback gain without worrying about specific prerequisites, which increases the tuning efficiency. The fuzzy system parameters are selected according to engineering experience and the control gains are tuned by trial and error based on the desired dynamic response. The boundary layer thickness Φ is selected on the basis of a compromise between the chattering phenomenon and the tracking accuracy. The proposed AFISMC parameters are shown in Table 2.

Fig. 3 Structure of AFISMC for feeding pressure control
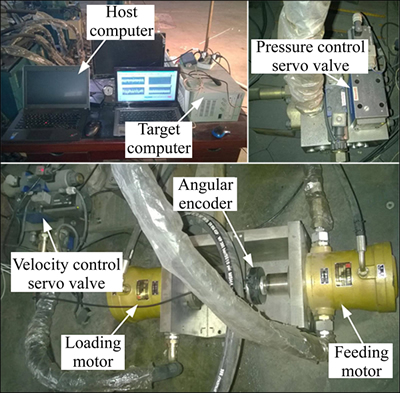
Fig. 4 Experimental test rig
Figure 6 shows the pressure tracking results of the two controllers in soil. As seen, the maximum tracking error of PI controller is more than 1 MPa and there exists a certain phase lag, while the tracking error of the proposed AFISMC controller is always less than 0.3 MPa. The AFISMC obviously exhibits better performance in soil than PI in terms of tracking errors.
The corresponding transient pressures p and pc are shown in Fig. 7, and the control input voltage is shown in Fig. 8. As can be seen, they are all bounded. Moreover, the control input is smooth.
Figure 9 shows the pressure tracking experimental results of the two controllers in hard soil. As seen, the two controllers show similar tracking error in the beginning time of the experiment. However, as the experiment continues, the proposed control scheme shows its advantage in comparison with PI controller. The tracking error of AFISMC converges to less than 0.2 MPa, while the maximum error of PI is still nearly 0.5 MPa. This indicates that the adaptive fuzzy system can decrease the tracking error through the adaptive law for the fuzzy system.
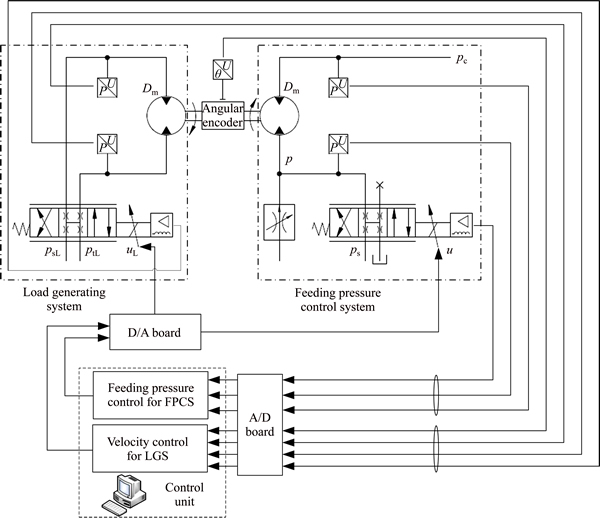
Fig. 5 Structure of test rig
Table 2 AFISMC control parameters


Fig. 6 Pressure tracking of system in soil

Fig. 7 Transient feeding and supply pressure of motor in soil using AFISMC
Figures 10 and 11 respectively show the sinusoidal tracking experimental results of the two controllers in limestone and granite. As seen, PI controller exhibits a little better performance than the proposed controller in the beginning time of the experiment. However, as the experiment continues, the proposed control scheme shows higher tracking accuracy in comparison with PI controller just as the previous experiment shows. The tracking error of AFISMC converges to less than 0.1 MPa, while the maximum error of PI is nearly 0.25 MPa.

Fig. 8 Control input of servo valve in soil using AFISMC

Fig. 9 Pressure tracking of system in hard soil
As previously stated, the conventional PI controller could achieve a relatively good tracking performance in limestone and granite, but it shows poor performance in soil and hard soil, thus it can not cover all the operating conditions. AFISMC achieves a good tracking performance in all the four operating conditions and shows higher tracking accuracy and faster response than PI except for in the beginning time of the experiments. The tracking error of AFISMC achieves rapid asymptotic decrease in the process of the approximation error of adaptive fuzzy system convergence through the fuzzy parameters tuning on-line.
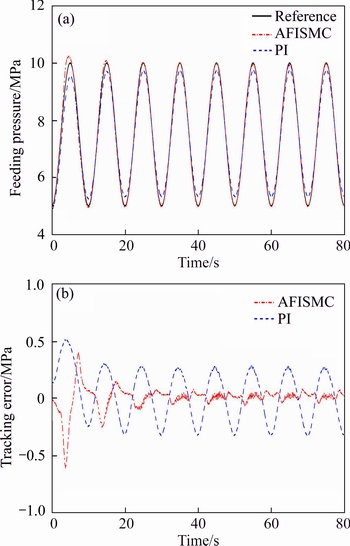
Fig. 10 Pressure tracking of system in limestone

Fig. 11 Pressure tracking of system in granite
Next, to evaluate the disturbance rejection ability of the proposed controller for pressure control of the system, we employ constant pressure reference x1d=7.5 MPa with disturbance introduced by the cutting rotational velocity of cutter. The cutting rotational speed disturbance signal is a sinusoidal signal whose amplitude is 10 r/min and frequency is 0.1 Hz.
The corresponding tracking errors of AFISMC and PI with disturbance in soil are respectively shown in Fig. 12. As seen, the maximum error of AFISMC is approximately 0.2 MPa except for the beginning and there always exists a better robustness compared with PI.
The corresponding tracking errors of AFISMC and PI with disturbance in hard soil are respectively shown in Fig. 13. As seen, the two controllers show similar performance in the beginning time of the experiment and the error of AFISMC is less than 0.5 MPa in the beginning. However, as the experiment continues, the ASFMC controlled pressure rapidly returns to the reference pressure and shows better robustness than PI.

Fig. 12 Constant tracking with disturbance in soil

Fig. 13 Constant tracking with disturbance in hard soil
The tracking errors of the two controllers with disturbance in limestone and granite are respectively shown in Figs. 14 and 15. As seen, PI controller exhibits a little better performance than AFISMC and the errors of AFISMC are both around 0.3 MPa in the beginning. However, as the experiment continues, the AFISMC controlled pressure rapidly returns to the reference pressure and remains almost unchanged. The maximum errors of AFISMC are both less than 0.1 MPa except for the beginning.
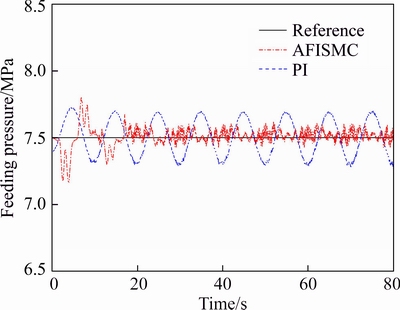
Fig. 14 Constant tracking with disturbance in limestone

Fig. 15 Constant tracking with disturbance in hard granite
As previously stated, AFISMC achieves better performance than PI with disturbance in all the four different operating conditions except for the beginning of the experiments. It is illustrated that the updating of the AFISMC parameters during the control process improves the robustness of the system.
5 Conclusions
In this work, feeding pressure control of CFS is presented. To deal with the particular characteristics of CFS, an AFISMC controller is designed for feeding pressure control of CFS, which combines the robust characteristics of an integral sliding mode controller and the adaptive adjusting characteristics of an adaptive fuzzy controller. The AFISMC feeding pressure controller is synthesized using backstepping technique. The stability of the overall closed-loop system consisting of the adaptive fuzzy inference system, integral sliding mode controller and the cutter feeding system is proved using Lyapunov theory. Finally, the effectiveness of the proposed controller is verified by the experimental results.
References
[1] ZHOU Hua, HOU Jiao-yi, ZHAO Yong-gang, CHEN Ying-long. Model-based trajectory tracking control for an electrohydraulic lifting system with valve compensation strategy [J]. Journal of Central South University, 2012, 19(11): 3110-3117.
[2] SEO J, VENUGOPAL R,  J. Feedback linearization based control of a rotational hydraulic drive [J]. Control Engineering Practice, 2007, 15(12): 1495-1507.
J. Feedback linearization based control of a rotational hydraulic drive [J]. Control Engineering Practice, 2007, 15(12): 1495-1507.
[3] NIKSEFAT N, SEPEHRI N. Design and experimental evaluation of a robust force controller for an electro-hydraulic actuator via quantitative feedback theory [J]. Control Engineering Practice, 2000, 8(12): 1335-1345.
[4] NAM Y, HONG S K. Force control system design for aerodynamic load simulator [J]. Control Engineering Practice, 2002, 10(5): 549-558.
[5] TRUONG D Q, AHN K K. Force control for hydraulic load simulator using self-tuning grey predictor-fuzzy PID [J]. Mechatronics, 2009, 19(2): 233-246.
[6] GUAN Cheng, PAN Shuang-xia. Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters [J]. Control Engineering Practice, 2008, 16(11): 1275-1284.
[7] LOUKIANOV A G, SANCHEZ E, LIZALDE C. Force tracking neural block control for an electro-hydraulic actuator via second- order sliding mode [J]. International Journal of Robust and Nonlinear Control, 2008, 18(3): 319-332.
[8] ASCHEMANN H, SCHINDELE D. Sliding-mode control of a high-speed linear axis driven by pneumatic muscle actuators [J]. IEEE Transactions on Industrial Electronics, 2008, 55(11): 3855- 3864.
[9] LEE H, KIM E, KANG H J, PARK M. A new sliding-mode control with fuzzy boundary layer [J]. Fuzzy Sets and Systems, 2001, 120(1): 135-143.
[10] CERMAN O,  P. Adaptive fuzzy sliding mode control for electro-hydraulic servo mechanism [J]. Expert Systems with Applications, 2012, 39(11): 10269-10277.
P. Adaptive fuzzy sliding mode control for electro-hydraulic servo mechanism [J]. Expert Systems with Applications, 2012, 39(11): 10269-10277.
[11] KOMSTA J, van OIJEN N, ANTOSZKIEWICZ P. Integral sliding mode compensator for load pressure control of die-cushion cylinder drive [J]. Control Engineering Practice, 2013, 21(5): 708-718.
[12] MOHANTY A, YAO Bin. Indirect adaptive robust control of hydraulic manipulators with accurate parameter estimates [J]. IEEE Transactions on Control Systems Technology, 2011, 19(3): 567-575.
[13] ALLEYNE A, LIU Rui. A simplified approach to force control for electro-hydraulic systems [J]. Control Engineering Practice, 2000, 8(12): 1347-1356.
[14] WANG Cheng-wen, JIAO Zong-xia, WU Shuai, SHANG Yao-xing. Nonlinear adaptive torque control of electro-hydraulic load system with external active motion disturbance [J]. Mechatronics, 2014, 24(1): 32-40.
[15] GUO Kai, WEI Jian-hua, TIAN Qi-yan. Disturbance observer based position tracking of electro-hydraulic actuator [J]. Journal of Central South University, 2015, 22(6): 2158-2165.
[16] KIM W, SHIN D, WON D, CHOO CHUNG C. Disturbance- observer-based position tracking controller in the presence of biased sinusoidal disturbance for electrohydraulic actuators [J]. IEEE Transactions on Control Systems Technology, 2013, 21(6): 2290-2298.
[17] WEI Jian-hua, GUO Kai, TIAN Qi-yan. Nonlinear supply pressure control for a variable displacement axial piston pump [J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2015, 29(7): 614-624.
[18] LIN J, HUANG Z Z. A hierarchical fuzzy approach to supervisory control of robot manipulators with oscillatory bases [J]. Mechatronics, 2007, 17(10): 589-600.
[19] KALYONCU M, HAYDIM M. Mathematical modelling and fuzzy logic based position control of an electrohydraulic servosystem with internal leakage [J]. Mechatronics, 2009, 19(6): 847-858.
[20] WANG Xing-jian, WANG Shao-ping, ZHAO Pan. Adaptive fuzzy torque control of passive torque servo systems based on small gain theorem and input-to-state stability [J]. Chinese Journal of Aeronautics, 2012, 25(6): 906-916.
[21] CERMAN O. Fuzzy model reference control with adaptation mechanism [J]. Expert Systems with Applications, 2013, 40(13): 5181-5187.
[22] MERRITT H E. Hydraulic Control Systems [M]. New York: John Wiley & Sons Inc, 1967: 1-10.
(Edited by FANG Jing-hua)
Foundation item: Project(2012AA041801) supported by the High-tech Research and Development Program of China
Received date: 2015-09-12; Accepted date: 2016-01-18
Corresponding author: WEI Jian-hua, Professor, PhD; Tel: +86-571-86791650; E-mail: jhwei@zju.edu.cn

