Fuzzy iterative learning control of electro-hydraulic servo system forSRM direct-drive volume control hydraulic press
来源期刊:中南大学学报(英文版)2010年第2期
论文作者:郑建明 赵升吨 魏树国
文章页码:316 - 322
Key words:hydraulic press; volume control electro-hydraulic servo; iterative learning control; fuzzy control
Abstract: A new kind of volume control hydraulic press that combines the advantages of both hydraulic and SRM (switched reluctance motor) driving technology is developed. Considering that the serious dead zone and time-variant nonlinearity exist in the volume control electro-hydraulic servo system, the ILC (iterative learning control) method is applied to tracking the displacement curve of the hydraulic press slider. In order to improve the convergence speed and precision of ILC, a fuzzy ILC algorithm that utilizes the fuzzy strategy to adaptively adjust the iterative learning gains is put forward. The simulation and experimental researches are carried out to investigate the convergence speed and precision of the fuzzy ILC for hydraulic press slider position tracking. The results show that the fuzzy ILC can raise the iterative learning speed enormously, and realize the tracking control of slider displacement curve with rapid response speed and high control precision. In experiment, the maximum tracking error 0.02 V is achieved through 12 iterations only.
基金信息:the National High-Tech Research and Development Program of China
the China Postdoctoral Science Foundation
J. Cent. South Univ. Technol. (2010) 17: 316-322
DOI: 10.1007/s11771-010-0048-9 ![]()
ZHENG Jian-ming(郑建明)1, 2, ZHAO Sheng-dun(赵升吨)1, WEI Shu-guo(魏树国)1
1. School of Mechanical Engineering, Xi’an Jiaotong University, Xi’an 710049, China;
2. School of Mechanical Instrumental Engineering, Xi’an University of Technology, Xi’an 710048, China
? Central South University Press and Springer-Verlag Berlin Heidelberg 2010
Abstract: A new kind of volume control hydraulic press that combines the advantages of both hydraulic and SRM (switched reluctance motor) driving technology is developed. Considering that the serious dead zone and time-variant nonlinearity exist in the volume control electro-hydraulic servo system, the ILC (iterative learning control) method is applied to tracking the displacement curve of the hydraulic press slider. In order to improve the convergence speed and precision of ILC, a fuzzy ILC algorithm that utilizes the fuzzy strategy to adaptively adjust the iterative learning gains is put forward. The simulation and experimental researches are carried out to investigate the convergence speed and precision of the fuzzy ILC for hydraulic press slider position tracking. The results show that the fuzzy ILC can raise the iterative learning speed enormously, and realize the tracking control of slider displacement curve with rapid response speed and high control precision. In experiment, the maximum tracking error 0.02 V is achieved through 12 iterations only.
Key words: hydraulic press; volume control electro-hydraulic servo; iterative learning control; fuzzy control
1 Introduction
The hydraulic presses are extensively used in different industries because they possess a high power- to-mass ratio, fast response, high stiffness and high load capability. However, the conventional hydraulic presses that adopt the valve-controlled hydraulic system have a lot of drawbacks, such as complex structure, considerable energy consumption, plentiful heat generating, high noise, serious vibration, high precision requirement of oil filtrating and large pressure losing [1].
Recently, with the maturity of the motor speed regulating and servo control techniques, the volume control electro-hydraulic servo system driven by various kinds of servo motor directly has appeared. It radically abandons the working principle and pattern of traditional valve-controlled hydraulic system. The bidirectional fixed volume pump is directly driven by the servo motor. The control of pressure, flow and direction of working liquid is realized through controlling the rotation speed and direction of pump. Thus, the control of the movement speed and direction of actuator is achieved without various servo valves. The volume control system has the property of simpler structure, higher reliability and greater mechanical efficiency compared with traditional valve-controlled electro-hydraulic servo system. Furthermore, the closed volume control system driven by servo motor directly possesses a series of advantages, such as wide governor range, high accuracy, good performance of energy saving, strong anti-pollution capability and easy control by computer. Thus, it has caused wide public concern in recent 20 years [2-5]. However, the volume control system, the same as the other electro-hydraulic servo systems, is seriously nonlinear due to the influence of its intrinsic properties and external disturbance. Therefore, the requirements of dynamic and steady-state indexes cannot be satisfied by using traditional control method [6-7]. ILC, as a branch of non-model control theory, can make the real outputs of the controlled object track the expected outputs by using the error between real outputs and expected outputs to regulate the value of control continuously. Compared with other control method, ILC has a very simple structure. It is especially suitable for solving the uncertainty problems caused by nonlinearity and poor system model. In industry control fields, more and more attention has been paid to ILC. In Refs.[8-9], ILC was adopted in an electro-hydraulic position servo system. The high positioning precision was achieved, and the dynamic response characteristic of system was improved enormously. Circular trajectory tracking of Pneumatic X-Y table was accomplished by using ILC [10]. Experimental studies on the convergence feature of 5- DOF robot manipulator movement locus tracking were carried out by using the control strategy combining adaptive ILC with classical PD [11]. In order to solve the initial control choice of ILC for a new tracking objective, a new method that made use of the historic data to determine the initial control by fuzzy inference was put forward [12]. The convergence speed was improved greatly with fuzzy sliding mode and variable learning gain ILC method [13-14]. In Ref.[15], a new adaptive switching learning control approach, called adaptive switching learning PD control (ASL-PD), was proposed. The simulation study validated that the convergence rate was faster than that of other iterative learning control method by using the ASL-PD.
The SRM servo driven technique is introduced into the field of hydraulic press by combining the latest achievement of electric, microelectronic and hydraulic control technology in this work. The SRM direct-drive volume control system is constructed to substitute the primary valve-controlled system of the hydraulic press. Considering that the serious nonlinearity exists in volume control electro-hydraulic servo system and the molding process is an operation with high repeatability, a new kind of fuzzy ILC method that can adaptively adjust the learning gains based on fuzzy strategies is put forward to carry out the position tracking control for the SRM direct-drive volume control hydraulic press.
2 Working principle of volume control hydraulic press
The working principle of the volume control hydraulic press is illustrated in Fig.1. The flow pressure, volume and direction of working medium can be controlled by using SRM to drive the bi-directional axial piston pump directly. So the movement speed and direction of hydraulic press slider is controlled by pump but not with valve. The total system comprises SRM speed control module, volume control module and auxiliary hydraulic loop module.
The SRM speed control module, including SRM and servo driver, controls the turning speed, angle, direction and torque of pump. The volume control module is made up of a bi-directionally dischargeable pump and an asymmetric piston cylinder, which controls the movement velocity, pressure and direction of piston by changing the turning speed and direction of pump. The auxiliary hydraulic loop module is composed of two relief valves and two check valves, which are connected with oil tank and the oil pipes of main loop. The relief valves play a role of unloading when overload and the check ones solve the flow unbalance between the rod-side and the piston-side. When the piston moves downwards, the pump delivers the hydraulic oil towards piston head with less volume of oil returned from the rod side. The supplement of oil is insufficient in the inlet of pump and the pressure in rod side decreases. The check valve opens reversely and the shortage of oil is suctioned from oil tank. However, as the piston moves upwards, the quantity of outflow oil in piston side is more than outflow oil in rod side. The pilot check valve opens reversely to return the surplus to the reservoir through the pipe shown in dot line. The flow volume balance is realized for the volume control of asymmetric cylinder.
3 Mathematic model of volume control electro-hydraulic servo system
3.1 Mathematic model of SRM module
The SRM and its driving system is a kind of typical complicate nonlinear system, thus it is hard to establish the exact mathematic model. In this work, according to the property of the motor and the limits of the highest rotation speed of piston pump, this module is simplified and shown in Fig.2.
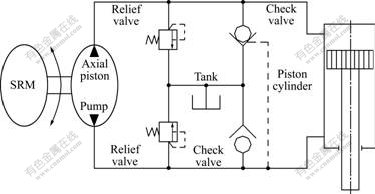
Fig.1 Working principle of SRM direct-drive hydraulic press
The model can be established individually from three zones. The first zone (-u1≤uc≤u1) is dead zone, in which the SRM does not turn because the lowest permissible rotating speed of SRM is 0.5 r/s. The second zone (uc≤-u2, uc≥u2) is saturation zone, in which the rotating speed of SRM is limited to the highest permissible speed of bump 25 r/s. The third zone is the normal working zone of SRM. Due to the frequency band of this module is wider than that of direct-drive electro-hydraulic position servo system enormously, thus, the property of SRM in this zone can be simplified to first-order inertial element. The transfer function is presented as:
![]() (1)
(1)
where Np is the rotation rate, r/s; Kv is the speed gain, r/(s?V); TD is the time constant, s; and U is the control voltage, V.
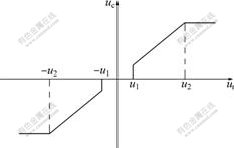
Fig.2 Property curve of SRM module
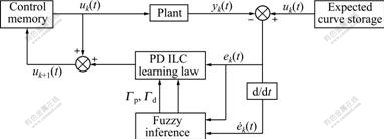
Fig.3 System structure of open-loop fuzzy PD ILC
3.2 Mathematic model of volume control module
3.2.1 Equation of flow continuity
If the leakage of pump and the pressure at low pressure terminal are ignored, the flow equation of piston side when piston moves downwards is shown as follows:
![]() (2)
(2)
where Np is the rotation rate of pump, r/s; Dp is the pump delivery, m3/r; λ is the leakage coefficient of piston cylinder, m3/(s?Pa); p1 is the oil pressure at piston side, Pa; V1(x) is the volume of piston-side (including volume of pipe and pump), m3; βe is the effective volume elastic modulus of medium, N/m2; A1 is the section area of piston-side, m2; and x is the displacement of piston, m.
3.2.2 Force equilibrium equation of piston
If some nonlinear factors, such as static fiction are ignored, based on Newton motion law, the force equilibrium equation when piston moves downwards can be obtained as follows:
![]() (3)
(3)
where F represents the theoretical output force of hydraulic cylinder, N; m is the total mass of load and piston, kg; Bp is viscous damping coefficient, N・s/m; K is elastic stiffness, N/m; and FL is the external load, N.
3.2.3 Transfer function of volume control module
If viscous damping and elasticity of load are ignored (Bp=0, K=0), the transfer function of piston displacement can be represented as follow based on Eqs.(2) and (3) when the rotation rate Np(s) and external load FL(s) act on the piston simultaneously:
 (4)
(4)
where ωh is the system natural frequency, ωh= ![]() rad/s; ξh is the damping ratio, ξh=
rad/s; ξh is the damping ratio, ξh= ![]() .
.
3.3 Mathematical model of system
When the piston moves downwards (upwards is similar), the open-loop transfer function is
(5)
where KC is open-loop gain calculated by the equation of KC=KvDp/(TDA1).
According to Eq.(5), the state equation and output equation of electro-hydraulic servo system driven by SRM directly are
 (6)
(6)
 (7)
(7)
In Eqs.(6) and (7)
![]() ,
, ![]()
![]() ,
, ![]()
where A, B and C are the state matrix, input matrix and output matrix, respectively; u is the input of system; x is the state vector, x=[x1 x2 x3 x4]T=[x ![]()
![]()
![]() ]T.
]T.
4 Fuzzy ILC controller design
4.1 Principle of ILC
For the controlled object with the characteristics of repetitive motion, unknown construction and parameters, it requires that output y(t) tracks expected output yd(t) when t![]() [0, T]. Assuming that the expected control ud(t) exists under the initial condition x(0), then the aim of ILC is to make u(t)
[0, T]. Assuming that the expected control ud(t) exists under the initial condition x(0), then the aim of ILC is to make u(t)![]() ud(t), y(t)
ud(t), y(t)![]() yd(t) with certain learning rule through repetitive motion. ILC is classified into open-loop and closed-loop learning. Through k operations, the output error is
yd(t) with certain learning rule through repetitive motion. ILC is classified into open-loop and closed-loop learning. Through k operations, the output error is
![]() (8)
(8)
Then the learning rule of open-loop PD ILC can be represented as:
![]() (9)
(9)
where Γp and Γd are the gain parameters of PD ILC; uk(t), uk+1(t) are the control quantities of the kth and (k+1)th at time t; and ek(t) is the error of the kth operation at t.
By adopting the above ILC with PD learning rule, when the learning gain is settled, tracking performance and convergence speed are fixed. The research results showed that the required precision was achieved generally only through thousands of iterative learning for the electro-hydraulic servo system [10-11]. The convergence rate of ILC is so slow that it is difficult to be applied to the practical system.
4.2 Algorithm of fuzzy ILC
4.2.1 Principle of fuzzy ILC
In order to solve the adaptive ability of ILC and improve convergence speed, a new kind of adaptive fuzzy ILC was put forward by combining ILC and adaptive fuzzy control, which is shown in Fig.3. A fuzzy inference module that can regulate iterative learning gain parameters adaptively is added into the open-loop PD ILC.
The fuzzy control module adopts the structure of two inputs and two outputs, in which the inputs are error and change in error coming from ILC at every turn, and the outputs are PD iterative learning gain parameters Γp and Γd. The fuzzy control module accomplishes adjusting the learning rate adaptively based on error and change in error. So the convergence speed of ILC can be accelerated.
4.2.2 Establishment of membership function
Fuzzy inference system is established on the basis of fuzzy set theory. At first, the input and output variables are needed to carry out fuzzification processing, which transforms the input and output variables into proper semantic value. In this work, the basic universes of input and output variables are: e![]() [-5, 5],
[-5, 5], ![]()
![]() [-10, 10], Γp
[-10, 10], Γp![]() [0, 5], Γd
[0, 5], Γd![]() [0, 10]. In order to design easily, the fuzzy universes are united as: e,
[0, 10]. In order to design easily, the fuzzy universes are united as: e, ![]()
![]() [-1, 1]; Γp, Γd
[-1, 1]; Γp, Γd![]() [0, 1]. The corresponding fuzzy subsets of input and output variables are:
[0, 1]. The corresponding fuzzy subsets of input and output variables are:
![]()
![]()
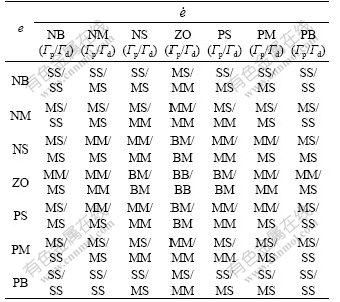
where NB is the abbreviation of negative big, NM is the negative middle, NS is the negative small, ZO is the zero, PS is the positive small, PM is the positive middle, and PB is the positive big; SS is the small, MS is the middle small, MM is the middle, BM is the big middle, and BB is the big.
Let NB and PB be trapezoidal membership functions and others be triangular membership functions; let BB be trapezoidal membership functions and others be triangular membership functions. All figures of the membership functions are shown in Figs.4 and 5.
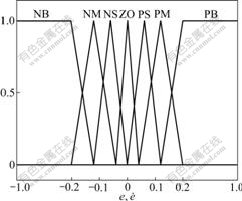
Fig.4 Membership function of e and ![]()
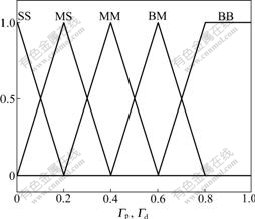
Fig.5 Membership function of Γp and Γd
4.2.3 Establishment of fuzzy inference rule
A key to implementing iterative learning gain adaptive adjustment during the design of fuzzy PD ILC is to establish exact fuzzy inference rules. So far, the professional knowledge about adaptively regulating learning gain parameters with error and change in error is deficient. In this work, the fuzzy mapping relation between inputs and outputs, shown in Table 1, is concluded through large amount of iterative learning simulation experiments which study influences of the gain parameter on iterative learning convergence rate.
Table 1 Fuzzy inference rule table
4.2.4 Fuzzy inference and defuzzification
The fuzzy inference rule used in Table 1 is as follows:
If e is Ai and ![]() is Bj, then Γp=Cij and Γd=Dij.
is Bj, then Γp=Cij and Γd=Dij.
where Ai, Bj, Cij and Dij are fuzzy subsets of input and output variables, and i, j=1, 2, 3, 4, 5, 6, 7.
The Mamdani min and max operators are adopted to carry out fuzzy calculation for fuzzy implication and synthesis respectively. Thus, the result of Γp (Γd is similar) is:
![]() (10)
(10)
After the output fuzzy set C′ that is acquired from the fuzzy operation is defuzzified by Centroid method, the iterative learning gain parameter Γp is obtained as follows:
 (11)
(11)
5 Simulation and experimental results
The volume control hydraulic press developed in this paper is reconstructed on the basis of common hydraulic press Y-63. The hydraulic system of original press is transformed based on the principle of SRM direct-drive volume control system described in Fig.1. The resistance displacement feedback sensor KTC-500 (The maximum distance is 500 mm, the output voltage is 0-5 V), and computer control system with 12 bit Yanhua high speed A/D D/A card PCI-1712 is added. The simulation and experiment studies have been carried out to investigate the performance of speed control and position servo of the direct-drive volume control system.
The simulation parameters of the above system are the SRM speed constant Kv=5 r/(s・V); the SRM time constant TD=0.078 s; the hydraulic oil volume elastic modulus βe=700 MPa; the leaking coefficient of piston cylinder λ=7×10-11 m?/(Pa・s); the piston-side section area of piston cylinder A1=3.14×10-2 m2; the mass of the moving parts m=120 kg; the piston-side volume of piston cylinder V1=1.57×10-2 m?; the pump delivery Dp=6×10-5 m3/r; the natural frequency of hydraulic system ωh1=605.408 rad/s; and the damping ratio of hydraulic system ξh1=2.577×10-3.
The initial control and objective curve are planned manually in order to ensure that the expected objective of ILC can be achieved. Firstly, a fixed SRM rotation rate curve is selected as the input of initial control. Then, the rotation rate curve is transformed into the velocity curve of piston movement according to linear proportion association. Finally, the piston displacement curve (shown in Fig.6) that possesses the characteristics of accelerating- constant-decelerating and positioning operations can be obtained through integral operation on the velocity curve.
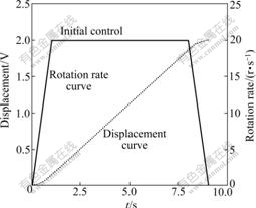
Fig.6 Planning of initial control and displacement curve
The simulation experiments are carried out to investigate the convergence speed and precision of ILC with the conventional PD and fuzzy PD learning arithmetic. The results are shown in Fig.7. The curves describe the variation of maximum absolute error in iterative learning process. It can be seen that the convergence speed of the conventional ILC is slow, and the PD iterative learning parameters play a significant role in convergence speed and precision. As shown in Fig.7(a), when the learning gain is small, the convergence speed at earlier stage is quickly while it is slow at later stage, and the convergence precision is low, the maximum error is 0.016 V after 100 times of iteration. With the increase of the learning gain, as shown in Figs.7(b) and (c), the convergence speed at earlier stage becomes slow, and the overshot vibration becomes violently, while at later stage, the convergence speed is quicker and precision is higher. The maximum error is 0.008 V after 76 times of iteration (shown in Fig.7(c)). For fuzzy PD ILC, the fuzzy control strategy is used to adaptively regulate learning gains based on error and change in error. For example, when the error and change in error are bigger, lower learning gain is adopted to avoid violent vibration, and when the error and change in error are smaller, higher learning gain is used to accelerate the convergence speed. Therefore, the convergence speed can be accelerated. The simulation results shown in Fig.7(d) demonstrate that the maximum error decreases to 0.008 V after 46 times of iteration with fuzzy PD ILC. It is obvious that the fuzzy PD ILC arithmetic can significantly improve the convergence speed and precision of iterative learning for hydraulic press position servo control.
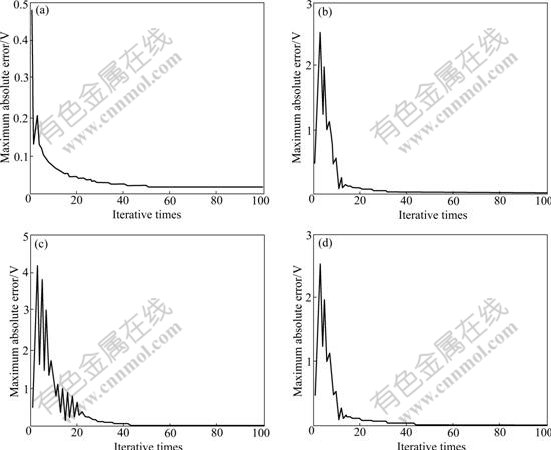
Fig.7 Simulation results of conventional PD and fuzzy PD ILC: (a) Conventional PD (Γp=0.5, Γd=2); (b) Conventional PD (Γp=2, Γd=5); (c) Conventional PD (Γp=5, Γd=10); (d) Fuzzy PD ILC (Γp=2, Γd=5)
Figs.8(a) and (b) describe the process of approaching objective curve and the maximum absolute error change curve obtained by fuzzy PD ILC in experiments, whose iterative objective and initial control are the same as those of stimulation.

Fig.8 Experimental results of open-loop fuzzy PD ILC:(a) Iterative and expected output; (b) Fuzzy PD ILC error curve
The maximum tracking error 0.02 V is acquired after 12 times of iteration when the fuzzy PD ILC is applied to carrying out displacement curve tracking. And due to the precision of sensor and performance of system, the maximum error maintains at 0.02 V when the iterative experiment continues. This is in accordance with the precision obtained in positioning control with closed-loop PID. Thus, the arithmetic proposed in this work can obtain the expected control signal with quicker speed and overcome the problems existing in conventional open-loop ILC. A novel control strategy is presented to fulfill the servo control of pressing process for direct-drive volume control hydraulic press.
6 Conclusions
(1) The SRM driven technique is introduced into the fields of hydraulic press. The traditional valve-controlled hydraulic servo system is replaced by SRM direct-drive volume control system. The electro-hydraulic position servo control of hydraulic press slider is realized.
(2) A kind of fuzzy ILC algorithm that can adaptively adjust the ILC gains using fuzzy strategy is put forward. The fuzzy algorithm principle and implementation process of adaptive adjustment ILC gains based on error and change in error is presented. A new approach is provided to improve the convergence rate of ILC.
(3) The simulated and experimental results show that the gain parameters of ILC have an important influence upon the convergence rate and precision, the fuzzy ILC can evidently accelerate the convergence rate in the process of ILC for electro-hydraulic servo system, and the displacement curve tracking control of hydraulic press slider is achieved with the higher precision of maximum error of 0.02 V after 12 iterations in experiments.
References
[1] QUAN Long. Current state, problems and the innovative solution of electro-hydraulic technology of pump controlled cylinder [J]. Chinese Journal of Mechanical Engineering, 2008, 44(11): 87-92. (in Chinese)
[2] ITO M, SATO H, MAEDA Y. Direct drive volume control of hydraulic system and its application to the steering system of ship [C]// Proceedings of FLUCOME’97. Hayama, 1997: 445-450.
[3] ITO M, HIROSE N, SHIMIZU E. Main engine revolution control for ship with direct drive volume control system [C]// Proceedings of ISME. Tokyo, 2000: 221-229.
[4] QUAN Long, LI Feng-lan, WANG Xiang. Study on the efficiency of differential cylinder system driven with servo motor and constant pump [J]. Proceedings of the CSEE, 2006, 26(8): 93-98.
[5] TIAN Yuan, WU Sheng-lin. Theoretic analysis and experiment of valveless electro-hydraulic servo system [J]. China Mechanical Engineering, 2003, 14(21): 1822-1823. (in Chinese)
[6] ZHANG You-wang, GUI Wei-hua. Compensation for secondary uncertainty in electro-hydraulic servo system by gain adaptive sliding mode variable structure control [J]. J Cent South Univ Technol, 2008, 15(2): 256-263.
[7] ZHOU Miao-lei, TIAN Yan-tao, GAO Wei, YANG Zhi-gang. High precise control method for a new type of piezoelectric electro-hydraulic servo valve [J]. J Cent South Univ Technol, 2007, 14(6): 832-837.
[8] WU Yong-hong, ZHANG De-hua, DUAN Suo-lin. Iterative learning control on electro-hydraulic position servo systems of the pump-controlled cylinder [J]. Journal of Taiyuan University of Science and Technology, 2006, 27(4): 277-280. (in Chinese)
[9] ZHAO Sheng-dun, WANG Ji, WANG Li-hong. Iterative learning control of electro-hydraulic proportional feeding system in slotting machine for metal bar cropping [J]. International Journal of Machine Tools and Manufacture, 2005, 45: 923-931.
[10] CHEN C K, HWANG J. Iterative learning control for position tracking of a pneumatic actuated X-Y table [J]. Control Engineering Practice, 2005, 13: 1455-1461.
[11] TAYEBI A, ISLAM S. Adaptive iterative learning control for robot manipulators: Experimental results [J]. Control Engineering Practice, 2006, 14: 843-851.
[12] GOPINATH S, KAR I N, BHATT R K P. Experience inclusion in iterative learning controllers: Fuzzy model based approaches [J]. Engineering Applications of Artificial Intelligence, 2008, 21: 578-590.
[13] WANG Yan, FU Yong-ling. Application of fuzzy sliding mode iterative learning control algorithm in hydraulic servo system [J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(11): 86-89. (in Chinese)
[14] XU Min, LIN Hui, LIU Zhen. Iterative learning control law with variable learning gain [J]. Control Theory and Applications, 2007, 24(5): 856-860. (in Chinese)
[15] OUYANG P R, ZHANG W J, GUPTA M M. An adaptive switching learning control method for trajectory tracking of robot manipulators [J]. Mechatronics, 2006, 16: 51-61.
Foundation item: Project(2007AA04Z144) supported by the National High-Tech Research and Development Program of China; Project(2007421119) supported by the China Postdoctoral Science Foundation
Received date: 2009-04-17; Accepted date: 2009-07-11
Corresponding author: ZHENG Jian-ming, PhD, Professor; Tel: +86-29-82312776; E-mail: zjm@xaut.edu.cn
(Edited by YANG You-ping)

