DOI: 10.11817/j.issn.1672-7207.2018.08.018
ЗЕКҪЖрЦШ»ъҙуіөЧФККУҰН¬ІҪРӯөчҫАЖ«ҝШЦЖ
АоУВёХЈ¬БхЛјУоЈ¬ЦмәмЗуЈ¬ЦЬКжЗе
(ЦРДПҙуС§ РЕПўҝЖС§Ул№ӨіМС§ФәЈ¬әюДП іӨЙіЈ¬410083)
ХӘТӘЈәХл¶ФЗЕКҪЖрЦШ»ъҙуіөРРЧЯ№эіМТЧЖ«АлХэіЈ№мөА¶шФміЙЖҪОИРФәН°ІИ«РФПВҪөөДОКМвЈ¬МбіцТ»ЦЦҙуіөН¬ІҪРӯөчҫАЖ«ҝШЦЖ·Ҫ·ЁЎЈ»щУЪЗЕКҪЖрЦШ»ъҙуіөРРЧЯ№эіМөДКЬБҰ·ЦОцЈ¬ҪЁБўЖдҫАЖ«¶ҜБҰС§ДЈРНЈ¬Мбіц»щУЪЎ°ОуІоУЕ»ҜЎұС§П°Лг·ЁөДЙсҫӯНшВзЧФККУҰҝШЦЖІЯВФЈ¬¶ФЗЕКҪЖрЦШ»ъҙуіөөДБҪІаЛЩ¶ИҪшРРРӯөчҝШЦЖЈ¬¶ФЛЩ¶ИІоЎўО»ТЖІоәНЖ«ЧӘҪЗҪшРРҝмЛЩФЪПЯөчХыЈ¬ҙУ¶шҫАХэҙуіөРРЧЯЖ«ІоЎЈСРҫҝҪб№ыұнГчЈәЛщМбҫАЖ«ҝШЦЖІЯВФҫЯУРБјәГөДҫАЖ«ҝШЦЖР§№ыЈ¬ЖрЦШ»ъҙуіөҝЙКөКұЧФөчХыЈ¬ҙпөҪМбёЯЗЕКҪЖрЦШ»ъФЛРРЖҪОИРФәН°ІИ«РФөДДҝөДЎЈ
№ШјьҙКЈәЗЕКҪЖрЦШ»ъЈ»ҫАЖ«Ј»¶ҜБҰС§ДЈРНЈ»ЙсҫӯНшВзЈ»Н¬ІҪРӯөч
ЦРНј·ЦАаәЕЈәTP273 ОДПЧұкЦҫВлЈәA ОДХВұаәЕЈә1672-7207(2018)08-1971-08
Synchronous coordinated deviation rectification adaptive control for overhead traveling crane
LI Yonggang, LIU Siyu, ZHU Hongqiu, ZHOU Shuqing
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: In the running process of overhead traveling crane, crane is easy to deviate from the normal track, which results in the decrease of the stability and safety. A method of synchronous rectification control for crane was proposed. Based on the analysis of forces in walking process of overhead traveling crane, the dynamic model of deviation rectification of overhead traveling crane was established, a neural network adaptive control strategy based on the learning algorithm of error optimization was proposed to coordinated control the speed of the two sides of overhead traveling crane and online adjust the speed difference, the displacement difference and the deflection angle and correct crane deviation. The results show that the good deviation rectification control effect is obtained, the crane can be adjusted in real time, and the stability and safety of the overhead traveling crane are improved.
Key words: overhead traveling crane; deviation rectification; dynamic model; neural network; synchronization and coordination
ФЪ№ӨТөЙъІъПЦіЎЈ¬ЗЕКҪЖрЦШ»ъөДФЛРР»·ҫіҪП¶сБУЈ¬№ӨЧчИООсҪП·ұЦШЈ¬¶шёчҪб№№јюөДОИ¶ЁРФәНҝЙҝҝРФҪПІоЎЈН¬КұЈ¬ЗЕКҪЖрЦШ»ъҝз¶ИҙуЈ¬Л®ЖҪёХ¶ИөНЈ¬°ІЧ°ҫ«¶ИТІДСТФұЈЦӨЈ¬ЗТФЪЧчТө№эіМЦРҝЙДЬ»бУцөҪұИҪПёҙФУөД№ӨҝцЈ¬ОӘҙЛЈ¬ЗЕКҪЖрЦШ»ъҙуіөФЪРРЧЯКұ»бІъЙъІ»Н¬іМ¶ИөДЕЬЖ«ПЦПуЈ¬өјЦВЧчТөР§ВКөНЈ¬СПЦШКұЙхЦБ·ўЙъ°ІИ«КВ№К[1-3]ЎЈ¶ФЗЕКҪЖрЦШ»ъҙуіөҪшРРҫАЖ«ҝШЦЖЈ¬ҝЙёДЙЖЖдФЪФЛРРКұөДЖҪОИРФәН°ІИ«РФЈ¬ҪөөНО¬»ӨіЙұҫЈ¬МбёЯЙъІъР§ВК[4]ЎЈҪьДкАҙЈ¬ИЛГЗ¶ФҫАЖ«ОКМвҪшРРБЛҙуБҝСРҫҝЎЈФЪҙ«НіөДЖрЦШ»ъҫАЖ«СРҫҝЦРЈ¬ҙу¶јІЙУГ»ъРөҫАЖ«өДҙҰАн·Ҫ·ЁЈ¬ЦчТӘКЗјхРЎіөВЦУл№мөАЦ®јдөДДҘЛрЈ¬ө«ХвІўГ»УРі№өЧҫАХэЖрЦШ»ъҙуіөөДРРЧЯЖ«ІоЎЈ¶шФЪёч№ӨТөЙъІъБмУтЈ¬ИЛГЗ¶ФҫАЖ«ҝШЦЖТІҪшРРБЛСРҫҝЎЈLIUөИ[5]Ҫ«ҫАЖ«ҝШЦЖ·Ҫ·ЁУҰУГУЪІЙГә»ъЧкН·ЙПЈ¬НЁ№эёДҪшPIDЛг·ЁАҙКөПЦЎЈёЯС©БЦөИ[6]Хл¶ФЛ®ЖҪ¶ЁПтЧк№мјЈЖ«ІоРЈХэОКМвЈ¬Мбіц№мјЈЧФ¶ҜҫАЖ«өДЛг·ЁЈ¬ФЪЙПО»»ъЙПКөПЦБЛЧФ¶ҜҫАЖ«ЎЈSUNөИ[7]»щУЪ¶аПЯҪб№№№вКУҫхАҙ¶ҜМ¬ІвБҝёЦ№мөДДҘәДіМ¶ИЈ¬ТФҙЛјмІвЖдФЛ¶ҜЖ«ІоЈ¬ҙУ¶шМбіцБЛЖ«ІоРЈХэ·Ҫ·ЁЎЈРмТ«БјөИ[8]ОӘБЛҪвҫцҫАЖ«ҝШЦЖЖчөДұ»ҝШ¶ФПуФЪёЯЛЩФЛРРЧҙМ¬ПВЛщҫЯУРөДёҙФУ·ЗПЯРФОКМвІўН¬КұМбёЯҫАЖ«ҝШЦЖЖчөДҫАЖ«ҫ«¶ИЈ¬Ҫ«ЧФККУҰДЈәэҝШЦЖ·Ҫ·ЁУҰУГУЪҫАЖ«ҝШЦЖЖчЦРЈ¬НЁ№эКөСйЦӨГчБЛёГ·Ҫ·ЁөДУРР§РФЎЈХвР©СРҫҝҪб№ы¶ФСРҫҝЗЕКҪЖрЦШ»ъҙуіөөДҫАЖ«ҝШЦЖҫЯУРәЬәГөДҪијшТвТеЎЈ¶шФЪЗЕКҪЖрЦШ»ъҙуіөөДҫАЖ«ҝШЦЖСРҫҝЦРЈ¬¶аКэСРҫҝХЯІаЦШУЪФЪУІјюЙПҙоҪЁҝШЦЖПөНіЈ¬Оҙ¶ФҫАЖ«ҝШЦЖФЛ¶Ҝ»ъАнҪшРРЙоИлМҪМЦЈ¬ОӘҙЛЈ¬БхиӘөИ[9]МбіцБЛЗЕКҪЖрЦШ»ъФЪҫАЖ«КұО»ЦГҫАЖ«әН·ҪПтҫАЖ«Н¬КұҪшРРөДЛЩ¶ИҝШЦЖІЯВФЈ¬АнВЫЙПҝЙөГөҪҪПәГөДҝШЦЖР§№ыЎЈОвУсПгөИ[10-12]¶ФЙсҫӯНшВзөДПа№ШУҰУГҪшРРБЛСРҫҝЎЈФЪТФЙПёчЦЦҫАЖ«ҝШЦЖІЯВФөДұіҫ°ПВЈ¬ұҫОДЧчХЯ¶ФЗЕКҪЖрЦШ»ъҙуіөФЛРРЧҙМ¬әНКЬБҰЗйҝцҪшРР·ЦОцЈ¬ҪЁБўЗЕКҪЖрЦШ»ъҙуіөРРЧЯҫАЖ«¶ҜБҰС§ДЈРНЈ»¶ФЖрЦШ»ъҙуіөБҪІаЛЩ¶ИәНО»ТЖТФј°Ж«ЧӘҪЗҪшРРҝШЦЖЈ¬АыУГёДҪшәуөДЙсҫӯНшВзЧФККУҰҝШЦЖЖчҪшРРН¬ІҪРӯөчҫАЖ«ҝШЦЖЈ¬ТФКөПЦЗЕКҪЖрЦШ»ъҙуіөЖҪОИ°ІИ«өДФЛРР[13]ЎЈ
1 ЗЕКҪЖрЦШ»ъҙуіөРРЧЯҫАЖ«¶ҜБҰС§ДЈРН
ЗЕКҪЖрЦШ»ъҙуіөФЪФЛРР№эіМЦРөДРРЧЯДЈКҪј°ЖдұҫЙн°ІЧ°ҫ«¶ИөИёчЦЦТтЛШФміЙіөЙнПа¶ФУЪ№мөАЖ«РұРРЧЯЈ¬КЗІъЙъЕЬЖ«ПЦПуөДёщұҫФӯТтЈ¬ТтҙЛЈ¬ҪвҫцЕЬЖ«ОКМвөДёщұҫ·Ҫ·ЁФЪУЪҫАХэіөЙнПа¶ФУЪ№мөАөДЖ«Рұ[14]ЎЈҫӯ№э¶ФЗЕКҪЖрЦШ»ъҙуіөЕЬЖ«КұФЛ¶ҜЧҙМ¬ҪшРР·ЦОц·ўПЦЈ¬ТӘК№Ж«ІоөГөҪҫАХэЈ¬ЧоЦХУҰК№өГЖрЦШ»ъҙуіөБҪІаО»ТЖТ»ЦВЈ¬јҙЕЬЖ«өДЖ«РұҪЗОӘ0ЎгЎЈТтҙЛЈ¬РиТӘөчХыЖрЦШ»ъҙуіөБҪІаөДЛЩ¶ИЈ¬К№ҙуіө·ўЙъЖ«ЧӘҙУ¶шҫАХэЕЬЖ«ЎЈөұЕЬЖ«Ж«ЧӘҪЗОӘ0ЎгКұЈ¬ұЈЦӨҙуіөБҪІаЛЩ¶ИәНО»ТЖҫщПаөИЈ¬ҙЛКұЈ¬ЖрЦШ»ъЖ«ІоөГөҪҫАХэЎЈ
КЧПИ·ЦОцЗЕКҪЖрЦШ»ъҙуіөөДФЛРРЧҙМ¬[15]ЎЈөұҙуіөХэіЈРРЧЯКұЈ¬ЖдФЛ¶ҜКҫТвНјИзНј1(a)ЛщКҫЈ»өұҙуіөЕЬЖ«КұЈ¬ЖдФЛ¶ҜКҫТвНјИзНј1(b)ЛщКҫЎЈ
өұЗЕКҪЖрЦШ»ъХэіЈФЛРРКұЈ¬ҙуіөБҪІаөз»ъМṩөДЗэ¶ҜБҰFl(ЧуІаЗэ¶ҜБҰ)әНFr(УТІаЗэ¶ҜБҰ)ПаөИЈ¬БҪІаО»ТЖXl(ЧуІаО»ТЖ)әНXr(УТІаО»ТЖ)ПаөИЈ¬БҪІаЛЩ¶И (ЧуІаЛЩ¶И)әН
(ЧуІаЛЩ¶И)әН (УТІаЛЩ¶И)ПаөИЈ¬ҙЛКұЈ¬ҙуіө°ҙХэіЈ·ҪПтРРЧЯЈ¬Ж«РұҪЗОӘ0ЎгЎЈөұЗЕКҪЖрЦШ»ъЕЬЖ«ФЛРРКұЈ¬ИфҙЛКұҙуіөБҪІаөз»ъМṩөДЗэ¶ҜБҰFlәНFrИФИ»ПаөИЈ¬ФтБҪІаЛЩ¶ИәНТІИФИ»ПаөИЈ¬ө«УЙУЪҙуіөЖ«РұҪЗҰИТСІъЙъЈ¬ФтБҪІаО»ТЖXlәНXrІ»ФЩПаөИЎЈИфТӘ¶ФЖдҫАЖ«Ј¬ҝјВЗНј1(b)ЛщКҫЗйҝцЈ¬ҙЛКұУҰК№FrЈҫFlЈ¬өчХыҙуіөБҪІаЛЩ¶ИәН
(УТІаЛЩ¶И)ПаөИЈ¬ҙЛКұЈ¬ҙуіө°ҙХэіЈ·ҪПтРРЧЯЈ¬Ж«РұҪЗОӘ0ЎгЎЈөұЗЕКҪЖрЦШ»ъЕЬЖ«ФЛРРКұЈ¬ИфҙЛКұҙуіөБҪІаөз»ъМṩөДЗэ¶ҜБҰFlәНFrИФИ»ПаөИЈ¬ФтБҪІаЛЩ¶ИәНТІИФИ»ПаөИЈ¬ө«УЙУЪҙуіөЖ«РұҪЗҰИТСІъЙъЈ¬ФтБҪІаО»ТЖXlәНXrІ»ФЩПаөИЎЈИфТӘ¶ФЖдҫАЖ«Ј¬ҝјВЗНј1(b)ЛщКҫЗйҝцЈ¬ҙЛКұУҰК№FrЈҫFlЈ¬өчХыҙуіөБҪІаЛЩ¶ИәН Ј¬К№өГЧоЦХXlәНXrПаөИЈ¬Ж«РұҪЗОӘ0ЎгЎЈ
Ј¬К№өГЧоЦХXlәНXrПаөИЈ¬Ж«РұҪЗОӘ0ЎгЎЈ
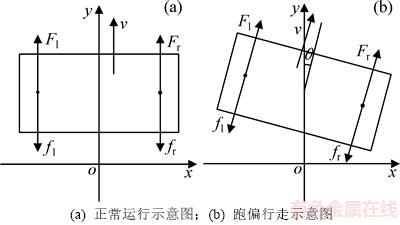
Нј1 ЗЕКҪЖрЦШ»ъҙуіөФЛРРЧҙМ¬КҫТвНј
Fig. 1 Schematic diagrams of operating state of bridge crane
ҫЭТФЙП·ЦОцЈ¬¶ФЗЕКҪЖрЦШ»ъҙуіөҪшРРҫАЖ«КұЈ¬Жд¶ҜМ¬МШРФҝЙУГПВГжөД¶ҜБҰС§·ҪіМГиКцЎЈ
ёщҫЭБҰҫШЖҪәвФӯАнЈ¬ҝјВЗөҪҙжФЪДҰІББҰЈ¬ЖрЦШ»ъҙуіөөДЖ«ЧӘЧӘҫШөИУЪ(ВФҙуУЪөИУЪ)ҙуіөБҪІаөДЗэ¶ҜБҰҫШЦ®ІоУлДҰІББҰҫШЦ®ІоөДәНЈ¬јҙ
 (1)
(1)
ЖдЦРЈәIОӘИЖЖрЦШ»ъҙуіөЦКРДөДЧӘ¶Ҝ№ЯБҝЈ»ҰИОӘЖ«РұҪЗјУЛЩ¶ИЈ»lОӘЖрЦШ»ъҙуіөҝн¶ИөДТ»°лЈ»FrОӘҙуіөУТІаЗэ¶ҜБҰЈ»FlОӘҙуіөЧуІаЗэ¶ҜБҰЈ»frОӘУТІаДҰІББҰЈ»flОӘЧуІаДҰІББҰЎЈ
јЩЙи№мөАУлҙуіөЦ®јдөДДҰІБТтКэОӘҰМЈ¬ЗТ¶юХЯЦ®јдөДДҰІББҰУлҙуіөЛЩ¶ИіКПЯРФ№ШПөЈ¬ФтҝЙөГЧуЎўУТБҪІаДҰІББҰОӘ
 (2)
(2)
ЖдЦРЈәОӘҙуіөУТІаЛЩ¶ИЈ» ОӘҙуіөЧуІаЛЩ¶ИЎЈ
ОӘҙуіөЧуІаЛЩ¶ИЎЈ
ёщҫЭЕЈ¶Щ¶ЁВЙЈ¬ҝЙөГ
 (3)
(3)
ЖдЦРЈәMОӘЖрЦШ»ъЦКБҝЈ»mОӘёәФШЦКБҝЈ» ОӘҙуіөУТІајУЛЩ¶ИЈ»
ОӘҙуіөУТІајУЛЩ¶ИЈ» ОӘҙуіөЧуІајУЛЩ¶ИЎЈ
ОӘҙуіөЧуІајУЛЩ¶ИЎЈ
БнНвЈ¬·ЦОцЖрЦШ»ъҙуіөЕЬЖ«КұөДФЛ¶ҜЧҙМ¬өГ
 (4)
(4)
¶Ф(4)КҪҪшРРЗуөјЈ¬ҝЙөГ
 (5)
(5)
ХыАнКҪ(1)~(5)ҝЙөГ
 (6)
(6)
¶Ф(6)КҪҪшРРұд»»Ј¬ҝЙөГ
 (7)
(7)
¶ЁТеЧҙМ¬ұдБҝ Ј¬ҝШЦЖКдИлОӘ
Ј¬ҝШЦЖКдИлОӘ Ј¬КдіцұдБҝОӘ
Ј¬КдіцұдБҝОӘ ЎЈФтУЙ(7)КҪөГЗЕКҪЖрЦШ»ъҙуіөҫАЖ«өД¶ҜБҰС§ЧҙМ¬·ҪіМОӘ
ЎЈФтУЙ(7)КҪөГЗЕКҪЖрЦШ»ъҙуіөҫАЖ«өД¶ҜБҰС§ЧҙМ¬·ҪіМОӘ
 (8)
(8)
ЖдЦРЈә
 Ј»
Ј»
 Ј»
Ј»
 ЎЈ
ЎЈ
ҫӯ·ЦОцҝЙЦӘЈәФЪёГДЈРНЦРЈ¬РиН¬КұҝШЦЖЖрЦШ»ъҙуіөБҪІаөДұдБҝЈ¬ҝШЦЖКдИлОӘFlәНFrЎЈТӘұЈЦӨҙуіөБҪІаөДЈ¬әНҰИН¬КұөГөҪҝШЦЖЈ¬ХвФцјУБЛҝШЦЖөДДС¶ИЈ¬ҙуіөДіТ»ІаөДІОКэұд»Ҝ»бУ°ПмөҪБнТ»ІаЈ¬ТтҙЛЈ¬ҫАЖ«ҝШЦЖ№эіМКЗКөКұН¬ІҪРӯөчҝШЦЖ№эіМЎЈөұҙуіөБҪІаҙпөҪЖҪәвјҙБҪІаО»ТЖІоЦөІ»ФЩРиТӘҫАХэКұЈ¬ҫАЖ«НкіЙЎЈ
УлҙЛН¬КұЈ¬ФЪКөјКЙъІъЧчТө№эіМЦРЈ¬ёГДЈРНЦРөДІОКэlЈ¬mәНҰМҫщ»б·ўЙъұд»ҜЈ¬ХвК№өГҝШЦЖұдөГ·ЗіЈёҙФУЎЈlОӘЖрЦШ»ъҙуіөҝн¶ИөДТ»°лЈ¬өұРЎіөЧуЎўУТАҙ»ШФЛ¶ҜКұЈ¬ЦШРД·ўЙъұд»ҜЈ¬ФтlТІ»б·ўЙъұд»ҜЈ»mОӘёәФШЦКБҝЈ¬ФЪТ»°гЗйҝцПВЈ¬ФЪ1ҙОЧчТө№эіМЦРёәФШЦКБҝІ»»б·ўЙъұд»ҜЈ¬ө«өұ2ҙОЧчТөөДёәФШұд»ҜұИҪПҙуКұЈ¬ТІ»б¶ФҙуіөөДРРЧЯІъЙъТ»¶ЁУ°ПмЈ»ҰМОӘДҰІБТтКэЈ¬ҙуіөФЛРР№мөАұнГжЗйҝцІ»Т»ЦВЈ¬КөјКЙПЈ¬ФЪЗЕКҪЖрЦШ»ъҙуіөРРЧЯ№эіМЦРЈ¬ёГІОКэ»б·ўЙъұд»ҜУ°ПмЖдРРЧЯВ·ҫ¶ЎЈТтҙЛЈ¬Ц»УРҝШЦЖДЈРНЦРёчІОКэөДұд»ҜЈ¬ІЕДЬК№ҫАЖ«ҝШЦЖҙпөҪБјәГөДР§№ыЎЈ
2 ЧФККУҰН¬ІҪРӯөчҫАЖ«ҝШЦЖІЯВФ
2.1 Н¬ІҪРӯөчҫАЖ«ҝШЦЖІЯВФ
ҙ«НіPIDҝШЦЖЖчУЙУЪҪб№№јтөҘЎўөчХы·ҪұгЈ¬ФЪ№эіМҝШЦЖЦР»сөГ№г·әУҰУГЎЈө«¶ФТ»Р©ёҙФУЗТКұұдПөНіЈ¬УЙУЪЖХНЁPIDІОКэІ»ДЬФЪПЯөчҪЪЈ¬ҝШЦЖР§№ыәЬДСВъЧгТӘЗуЎЈ¶шХл¶ФЗЕКҪЖрЦШ»ъХвЦЦФЛРР»·ҫіұИҪП¶сБУЎўПЦіЎёЙИЕұИҪП¶аөДҫАЖ«ҝШЦЖЈ¬ФЪЦЪ¶аҝШЦЖ·Ҫ·ЁЦРЈ¬»щУЪЙсҫӯНшВзФЪХвЦЦ·ЗПЯРФ»·ҫіЦРБјәГөДҝмЛЩРФәНКөКұРФЈ¬ЙсҫӯНшВзҫАЖ«ҝШЦЖПөНі»бФЪЖ«РұІъЙъәуҝмЛЩПмУҰЈ¬ј°КұҫАЖ«Ј¬ұЈЦӨЖрЦШ»ъҙуіөДЬҝмЛЩ»ШөҪХэіЈФЛРРЧҙМ¬Ј¬өұҫАЖ«№эіМЦРёЙИЕФЩҙОІъЙъКұЈ¬ЙсҫӯНшВзҫЯУРәЬЗҝөДЧФККУҰәНЧФөчҪЪДЬБҰЈ¬ҝШЦЖІОКэҝЙҪшРРФЪПЯЧФХы¶ЁЈ¬ЖрөҪБјәГөДҝШЦЖР§№ыЎЈТтҙЛЈ¬»щУЪЙсҫӯНшВзҝШЦЖ·Ҫ·ЁәНЗ°КцҫАЖ«ҝШЦЖПөНіДЈРНЈ¬ҝЙҪшРРҫАЖ«ҝШЦЖЖчЙијЖЎЈ
ЙиАнПлІОҝјЛЩ¶ИОӘ Ј¬ЗЕКҪЖрЦШ»ъ¶ФПуДЈРНКдіцәуҝЙөГөҪПаУҰөДЛЩ¶ИәНЎЈ¶ЁТеЖрЦШ»ъҙуіөБҪІаөДЛЩ¶ИОуІоәҜКэОӘ
Ј¬ЗЕКҪЖрЦШ»ъ¶ФПуДЈРНКдіцәуҝЙөГөҪПаУҰөДЛЩ¶ИәНЎЈ¶ЁТеЖрЦШ»ъҙуіөБҪІаөДЛЩ¶ИОуІоәҜКэОӘ әН
әН ЎЈ¶ш¶ФУЪЖ«РұҪЗҰИЈ¬АнПлЗйҝцПВІ»·ўЙъИОәОЖ«РұЈ¬АнПлЖ«РұҪЗОӘ0ЎгЎЈТтҙЛЈ¬¶ЁТеЖрЦШ»ъҙуіөЖ«РұҪЗОуІоәҜКэОӘ
ЎЈ¶ш¶ФУЪЖ«РұҪЗҰИЈ¬АнПлЗйҝцПВІ»·ўЙъИОәОЖ«РұЈ¬АнПлЖ«РұҪЗОӘ0ЎгЎЈТтҙЛЈ¬¶ЁТеЖрЦШ»ъҙуіөЖ«РұҪЗОуІоәҜКэОӘ ЎЈ
ЎЈ
»щУЪТФЙП·ЦОцТФј°ЙПКцҫАЖ«ҝШЦЖДЈРНЈ¬ФЪёГҝШЦЖПөНіЦРТэИлЛЩ¶ИҝШЦЖЖчәНҪЗ¶ИҝШЦЖЖчЈ¬ЛЩ¶ИҝШЦЖЖчҝШЦЖБҪІаЛЩ¶ИПаөИЈ¬ҪЗ¶ИҝШЦЖЖчҝШЦЖЖ«РұҪЗОӘ0ЎгЈ¬јҙБҪІаО»ТЖПаөИЎЈҝШЦЖПөНіҪб№№ҝтНјИзНј2ЛщКҫЎЈ
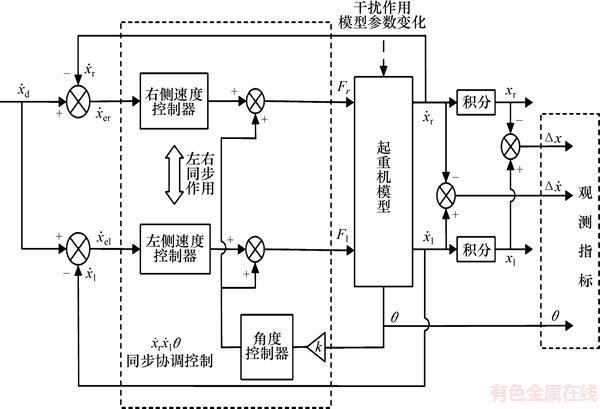
Нј2 ЗЕКҪЖрЦШ»ъН¬ІҪРӯөчҫАЖ«ҝШЦЖПөНіҪб№№ҝтНј
Fig. 2 Block diagram of synchronous coordination correction control system bridge crane
2.2 ЧФККУҰҝШЦЖЖчЙијЖ
АыУГЙсҫӯНшВзДЈРНАҙҪшРРҝШЦЖЖчЙијЖЈ¬ЖдФӯАнҝтНјИзНј3ЛщКҫ[16]ЎЈ
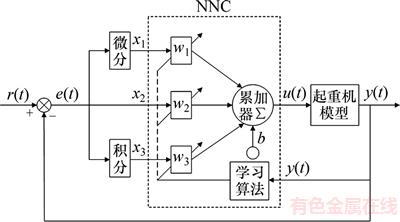
Нј3 ЧФККУҰPIDҝШЦЖФӯАнҝтНј
Fig. 3 Principle diagram of adaptive PID control
ұҫПөНіАыУГ1ёцИэКдИлЙсҫӯНшВзДЈРН[17]ЎЈёГДЈРНУЙ1ёцКдИлПтБҝЎў1ёцАЫјУЖчәН1ёцҙ«КдәҜКэЧйіЙЈ¬ЖдКдИлКдіц№ШПөОӘ (ЖдЦРЈә
(ЖдЦРЈә Ј¬ОӘКдИлПтБҝЈ»
Ј¬ОӘКдИлПтБҝЈ» Ј¬ОӘИЁЦөТтЛШПтБҝЈ»f[ЎӨ]ОӘҙ«КдәҜКэЈ»aОӘНшВзКдіц)ЎЈ
Ј¬ОӘИЁЦөТтЛШПтБҝЈ»f[ЎӨ]ОӘҙ«КдәҜКэЈ»aОӘНшВзКдіц)ЎЈ
УлЖдЛыҝШЦЖПөНіІ»Н¬Ј¬ұҫПөНіФЪҙуіөБҪІаН¬КұҪшРРҫАЖ«ҝШЦЖЈ¬ЧчУГУЪЗЕКҪЖрЦШ»ъХв1ёцұ»ҝШ¶ФПуЈ¬ТтҙЛЈ¬ЛЩ¶ИҝШЦЖЖчәНҪЗ¶ИҝШЦЖЖчН¬КұЧчУГ[18]Ј¬ЙсҫӯНшВзН¬КұҪшРРФЪПЯЧФХы¶ЁЈ¬ФцјУБЛРӯөчҝШЦЖөДДС¶ИЎЈ
Ҫ«ұнҙпКҪЦРөДaАЫјУЖчКдіцёДРҙіЙұкБҝРОКҪЈ¬nОӘАЫјУЖчКдіцЈ¬УР
 (9)
(9)
ЙсҫӯНшВзКдИлПтБҝЦРөД3ёцКдИлБҝx1Ј¬x2әНx3·ЦұрОӘe(k)Ј¬ әН
әН (ЖдЦРЈ¬e(k)ОӘОуІоәҜКэЈ»ОӘОуІоөДұд»ҜБҝЈ¬ПаөұУЪОуІоөДОў·ЦЈ»ОӘОуІоұд»ҜөДЛЩ¶ИЈ¬ПаөұУЪОуІоөД»э·Ц)ЎЈТтҙЛЈ¬ФЪұҫҫАЖ«ҝШЦЖПөНіЦРЈ¬ЙсҫӯНшВзЛЩ¶ИҝШЦЖЖчөДКдИлБҝОӘЛЩ¶ИІоЎўЛЩ¶ИІоұд»ҜБҝЎўЛЩ¶ИІоұд»ҜјУЛЩ¶ИЈ¬ЙсҫӯНшВзҪЗ¶ИҝШЦЖЖчөДКдИлБҝОӘЖ«РұҪЗЎўЖ«РұҪЗұд»ҜБҝЎўЖ«РұҪЗұд»ҜјУЛЩ¶ИЎЈ
(ЖдЦРЈ¬e(k)ОӘОуІоәҜКэЈ»ОӘОуІоөДұд»ҜБҝЈ¬ПаөұУЪОуІоөДОў·ЦЈ»ОӘОуІоұд»ҜөДЛЩ¶ИЈ¬ПаөұУЪОуІоөД»э·Ц)ЎЈТтҙЛЈ¬ФЪұҫҫАЖ«ҝШЦЖПөНіЦРЈ¬ЙсҫӯНшВзЛЩ¶ИҝШЦЖЖчөДКдИлБҝОӘЛЩ¶ИІоЎўЛЩ¶ИІоұд»ҜБҝЎўЛЩ¶ИІоұд»ҜјУЛЩ¶ИЈ¬ЙсҫӯНшВзҪЗ¶ИҝШЦЖЖчөДКдИлБҝОӘЖ«РұҪЗЎўЖ«РұҪЗұд»ҜБҝЎўЖ«РұҪЗұд»ҜјУЛЩ¶ИЎЈ
І»ДС·ўПЦЈ¬КҪ(9)ЛщКҫөДөҘЙсҫӯФӘИэКдИлЙсҫӯНшВзДЈРНөДАЫјУЖчКдіцУлФцБҝКҪАлЙўPIDҝШЦЖДЈРНУРЧЕПаН¬өДКдИлЎўКдіц№ШПө[19]Ј¬ТтҙЛЈ¬ҝЙөГөҘЙсҫӯФӘЙсҫӯНшВзPIDҝШЦЖЖчДЈРНИзПВЈә
 (10)
(10)
u(k)ОӘЙсҫӯНшВзДЈРНөДКдіцБҝЈ¬Н¬КұТІКЗұ»ҝШ¶ФПуЖрЦШ»ъҙуіөөДКдИлБҝЎЈҙУёГҝШЦЖЖчДЈРНҝЙТФҝҙіцЈә¶ФҝШЦЖЖчөД3ёцИЁЦөТтЛШҪшРРФЪПЯөчХыјҙҝЙёДұдҝШЦЖЖчөДКдіцЈ¬ҝШЦЖІОКэw1Ј¬w2әНw3ҫЯУРЧФККУҰЎўЧФС§П°№ҰДЬЈ¬ҙУ¶шКөПЦІОКэөДЧФХы¶ЁЎЈ
ФЪұҫҫАЖ«ҝШЦЖПөНіЦРЈ¬ОуІоәҜКэЧчОӘҝШЦЖЖчөДКдИлБҝЈ¬ИфДЬҪ«ЖдҝмЛЩПыіэЦБЖЪНыЦөЈ¬ФтҫАЖ«№эіМНкіЙЎЈТтҙЛЈ¬ФЪЙсҫӯНшВзЧФККУҰҝШЦЖЖчЦРЈ¬С§П°Лг·ЁЦБ№ШЦШТӘЈ¬ҙЛҙҰІЙУГөДКЗЎ°ОуІоУЕ»ҜЎұЛг·ЁЈ¬НЁ№эСӯ»·АыУГОуІоәҜКэЈ¬e(k)әНөГөҪПаУҰІоЦөЈ¬ҙУ¶шІ»¶ПФЪПЯөчХыИЁЦөТтЛШw1Ј¬w2әНw3ЎЈҝШЦЖІОКэөДөчХы№эіМұҫЦКЙПКЗТ»ёцУЕ»ҜЛСЛч№эіМЈ¬јҙФЪ1ёцУЙОЮЗоЧйҪв№№іЙөДw1Ј¬w2әНw3ИэО¬ҪвҝХјдЦРЛСС°Т»ЧйҝЙ¶ФөұЗ°ДҝұкПөНіКөРРУРР§ҝШЦЖөДВъТвҪвөД№эіМЎЈХвСщ·ҙёҙУЕ»ҜЛСЛчЈ¬ЧоЦХҝЙөГ1ёцЧоУЕКдіцЦөЈ¬ЧчУГУЪЖрЦШ»ъҙуіөЎЈҙуіөБҪІаН¬ІҪРӯөчҝШЦЖЈ¬Ж«ІоҝЙҝмЛЩПыіэЎЈ
К№УГөДЎ°ОуІоУЕ»ҜЎұС§П°Лг·ЁҫЯМе№жФтИзПВЎЈ
БоЙсҫӯНшВзИЁЦөТтЛШөДёьРВВЙВъЧгИзПВ№ШПөЈә
 (11)
(11)
ФтҝЙөГИЁЦөТтЛШөДөчХыБҝОӘ

 (12)
(12)
ЖдЦРЈәhiОӘИЁЦөТтЛШөДПаУҰФцТжЎЈФт3ПоИЁЦөТтЛШЦ®әНwaddОӘ
 (13)
(13)
waddУГУЪИЁЦөТтЛШөДөчХыЎЈАыУГёГС§П°Лг·ЁЈ¬»щУЪЙсҫӯНшВзЧФККУҰҝШЦЖЖчҪшРРФЪПЯС§П°Ј¬ҫӯККөұСөБ·әуЈ¬Кдіц Ҫ«ұЖҪьyЈ¬К№өГКдіцЦрҪҘОИ¶ЁЈ¬КөПЦБјәГҝШЦЖР§№ыЎЈ
Ҫ«ұЖҪьyЈ¬К№өГКдіцЦрҪҘОИ¶ЁЈ¬КөПЦБјәГҝШЦЖР§№ыЎЈ
НЁ№эТФЙП·ЦОцҝЙЦӘЗЕКҪЖрЦШ»ъҙуіөҫАЖ«ҝШЦЖКЗТ»ёцН¬ІҪРӯөчҝШЦЖ№эіМЈ¬өұјмІвөҪҙуіөБҪІаО»ТЖІ»өИКұЈ¬ҫАЖ«№эіМЖф¶ҜЈ¬ҝШЦЖЖчН¬ІҪРӯөчҪшРРЎЈЦ»УРөұЖрЦШ»ъҙуіөБҪІаЛЩ¶ИәНО»ТЖҫщПаөИТФј°Ж«ЧӘҪЗОӘ0ЎгКұЈ¬ҫАЖ«ІЕЦХЦ№Ј¬·сФтҝШЦЖЖчіЦРшЧчУГЦұЦБҪбКшЎЈЗЕКҪЖрЦШ»ъҙуіөҫАЖ«ҝШЦЖЛјВ·ИзНј4ЛщКҫЎЈ
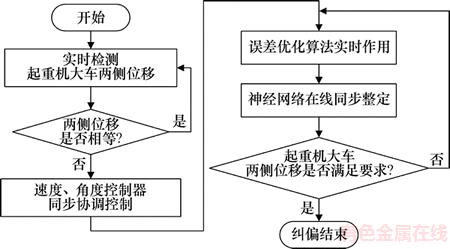
Нј4 ЗЕКҪЖрЦШ»ъҙуіөҫАЖ«ҝШЦЖЛјВ·
Fig. 4 Deviation correction control idea of bridge crane
3 ·ВХжј°Ҫб№ы·ЦОц
ОӘБЛІвКФЛщЙијЖҫАЖ«ҝШЦЖЖчөДҫАЖ«РФДЬЈ¬ФЪMATLAB SIMULINK»·ҫіЦРҪшРР·ВХжКөСйЎЈ
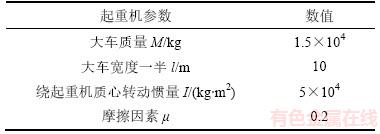
ЗЕКҪЖрЦШ»ъҙуіөөДУР№ШіхКјІОКэИзұн1ЛщКҫЎЈ
ОӘК№·ВХжҪб№ыёьЗеОъЎўЦұ№ЫЈ¬Ҫ«ҙуіөБҪІаЛЩ¶ИәНО»ТЖ·ЦұрЗуІоЈ¬өГөҪЛЩ¶ИІоәНО»ТЖІоЧчОӘ·ВХжҪб№ыЎЈ
ұн1 ЗЕКҪЖрЦШ»ъҙуіөіхКјІОКэ
Table 1 Bridge crane trolley initial parameters
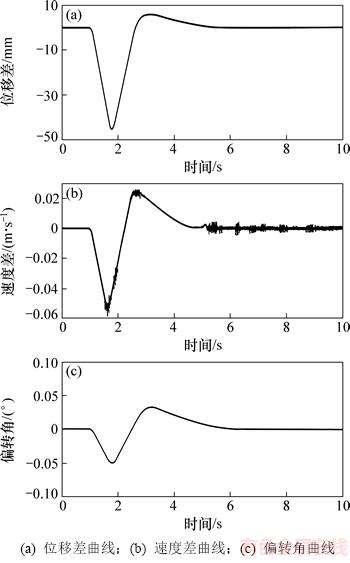
ОӘСйЦӨІЙУГЎ°ОуІоУЕ»ҜЎұЛг·ЁәуҝШЦЖЖчөДУРР§РФәНПИҪшРФЈ¬ХвАпУлBPЙсҫӯНшВзҪшРР·ВХж¶ФұИЈ¬өұІЙУГЖХНЁЙсҫӯНшВзҫАЖ«КұЈ¬·ВХжҪб№ыИзНј5ЛщКҫЎЈ
Нј5 »щұҫҝШЦЖЖчҝШЦЖЗъПЯ
Fig. 5 Control curves of basic controller
ҙУНј5ҝЙҝҙіцЈәөұІЙУГЖХНЁЙсҫӯНшВзҫАЖ«КұЈ¬О»ТЖІоҫӯ5~6 sҪУҪь0 mЈ¬ө«ЛЩ¶ИІоУРІЁ¶ҜЈ¬ЛЩ¶ИәНІ»№»ОИ¶ЁЈ¬Ж«ЧӘҪЗҰИКХБІҪПВэЈ¬ҝЙјыҝШЦЖЖч¶ФҝШЦЖБҝөДөчХы»№І»№»өҪО»ЎЈ
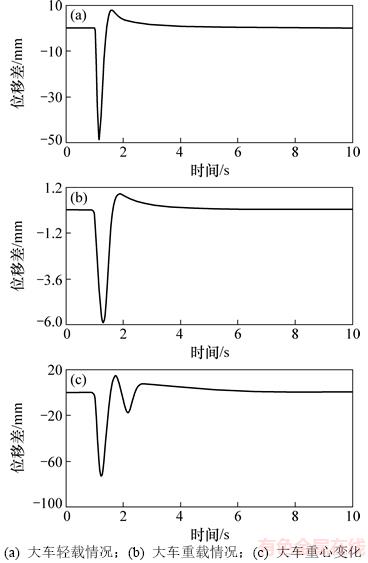
¶шөұІЙУГёДҪшәуөДЙсҫӯНшВзҪшРРҝШЦЖКұЈ¬·ЦұрФЪЗбФШЎўЦШФШәНЦШРДұд»ҜХв3ЦЦ№ӨҝцПВҪшРР·ВХжЈ¬ФЪөЪ1 sКұК©јУёЙИЕК№ЖдІъЙъЕЬЖ«ПЦПуЎЈ3ЦЦ№ӨҝцПВөДО»ТЖІоЗъПЯИзНј6ЛщКҫЈ¬ЛЩ¶ИІоЗъПЯИзНј7ЛщКҫЈ¬Ж«ЧӘҪЗЗъПЯИзНј8ЛщКҫЎЈ
ҙУНј6ҝЙҝҙіцЈәөұІЙУГёДҪш·Ҫ·ЁҪшРРҫАЖ«ҝШЦЖКұЈ¬ҝШЦЖПмУҰЛЩ¶ИҝмЈ¬ЗбФШКұҪц2~3 sұгҝЙНкіЙҫАЖ«Ј¬ЦШФШКұО»ТЖІоТІәЬҝмКХБІЎЈ¶шөұЦШРД·ўЙъұд»ҜКұЈ¬ФЪҫӯАъРЎ·¶О§ІЁ¶ҜәуЈ¬ҫӯөчХыЈ¬4~5 sјҙҝЙКХБІЎЈ
ҙУНј7ҝЙҝҙіцЈәөұІЙУГёДҪш·Ҫ·ЁҪшРРҫАЖ«ҝШЦЖКұЈ¬ЗбФШәНЦШФШКұЗЕКҪЖрЦШ»ъҙуіөөДБҪІаЛЩ¶ИәНІЁ¶Ҝ¶јј«РЎЎўәЬОИ¶ЁЈ¬ҙуіөЦШРДёДұдЗйҝцФЪҫӯАъІЁ¶ҜөчХыәуЖдЛЩ¶ИТІј«ОИ¶ЁЈ¬ЛЩ¶ИІоҝШЦЖР§№ыАнПлЎЈ
ҙУНј8ҝЙҝҙіцЈәөұІЙУГёДҪш·Ҫ·ЁҪшРРҫАЖ«ҝШЦЖКұЈ¬Ж«ЧӘҪЗҰИФЪЗбФШЎўЦШФШКұ¶јДЬҝмЛЩПыіэЈ¬ҙуіөЦШРДұд»ҜКұҫӯ№э2 sІЁ¶ҜәуТІДЬПыіэЦБ0ЎгЈ¬ҝШЦЖРФДЬБјәГЎЈ
ЧЫЙПҝЙЦӘЈәІЙУГёДҪш·Ҫ·ЁКұЈ¬ФЪІ»Н¬ЧҙМ¬ПВҫАЖ«ҝШЦЖР§№ыГчПФЈ¬ҝШЦЖПмУҰЛЩ¶ИҝмЈ¬ЛЩ¶ИІоәНО»ТЖІоКХБІЛЩ¶ИҝмЈ¬Ж«ЧӘҪЗПыіэР§№ыәГЎЈТФЙП·ВХжҪб№ыЦӨГчБЛұҫОДЛщМбөДҝШЦЖ·Ҫ·ЁөДУРР§РФәНПИҪшРФЎЈ
Нј6 ёДҪшЧФККУҰҝШЦЖЖчО»ТЖІоЗъПЯ
Fig. 6 Displacement curves of improved adaptive controller
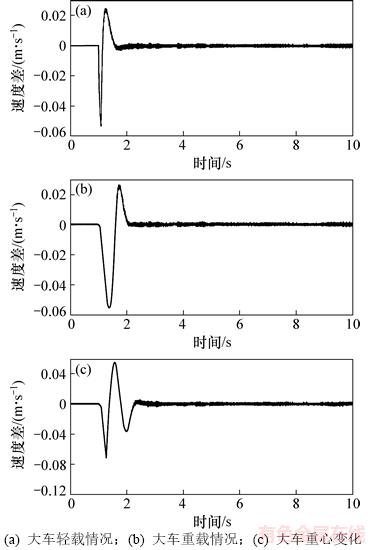
Нј7 ёДҪшЧФККУҰҝШЦЖЖчЛЩ¶ИІоЗъПЯ
Fig. 7 Speed difference curves of improved adaptive controller
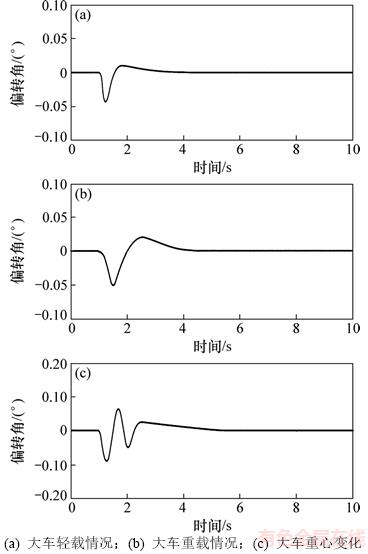
Нј8 ёДҪшЧФККУҰҝШЦЖЖчЖ«ЧӘҪЗЗъПЯ
Fig. 8 Deflection angle curves of improved adaptive controller
4 ПЦіЎПөНіЙијЖј°УҰУГ
ТФНӯөзҪвЧЁУГЗЕКҪЖрЦШ»ъОӘ¶ФПуҪшРРПЦіЎСРҫҝЎЈЖдЧФ¶ҜФЛРРПөНіҝЙКөПЦІЩЧчИЛФұФЪУСәГөДHMIПөНіЙПёщҫЭЙъІъИООс¶ФёчПоИООсЦёБоПВҙпЈ¬ЗЕКҪЖрЦШ»ъёщҫЭЦёБоНЁ№э№ӨТөТФМ«НшУлөШГж»ъЧйНЁРЕЈ¬РӯөчЕдәПЈ¬ёЯР§өШЧФ¶ҜҪшРРТхСфј«°еСӯ»·ЧӘФЛЧчТөЎЈ
ұҫПөНіЦчТӘ·ЦОӘБҪҙуІҝ·ЦЈәНӯөзҪвЧЁУГЗЕКҪЖрЦШ»ъЧФ¶ҜФЛРРҝШЦЖПөНіәННӯөзҪвЧЁУГЗЕКҪЖрЦШ»ъHMIПөНіЎЈТФНӯөзҪвЧЁУГРРіөЧФ¶ҜФЛРРҝШЦЖПөНіөДS7-300CPUОӘЦРРДЈ¬НЁ№эProfibusЈ¬ProfinetПЦіЎЧЬПЯТФј°№ӨТөТФМ«НшКөПЦУлёчҝШЦЖөҘФӘЎўҙУХҫөДI/OәНHMIНЁРЕЎЈНӯөзҪвЧЁУГЗЕКҪЖрЦШ»ъЧФ¶ҜФЛРРПөНіөДХыМејЬ№№ИзНј9ЛщКҫЎЈ
ёщҫЭПЦіЎЗЕКҪЖрЦШ»ъҙуіөөДЗэ¶ҜПөНіҪб№№Ј¬ҝЙҪшТ»ІҪөГөҪҙуіөРРЧЯҫАЖ«ҝШЦЖөДХыМеҝШЦЖЛјВ·ЈәІЙУГЗЕКҪЖрЦШ»ъҙуіөБҪІајӨ№вІвҫаТЗҪшРРІвҫаЈ»ҫӯPLCҝШЦЖЈ¬ФЩҫӯҙуіөБҪІаұдЖөЖчәНөз»ъ·Цұр¶ФҙуіөіөВЦҪшРРөчЛЩЈ¬ЧоЦХК№өГҙуіөБҪІаРРЧЯҫаАлПаөИЎЈЗЕКҪЖрЦШ»ъҙуіөҫАЖ«ҝШЦЖПөНіҪб№№ИзНј10ЛщКҫЎЈ
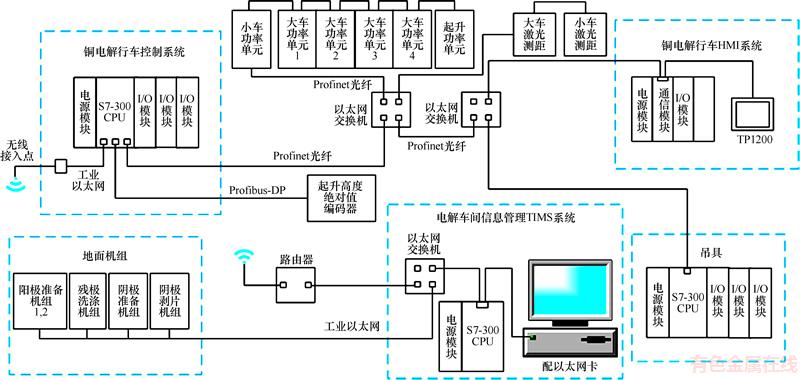
Нј9 НӯөзҪвЧЁУГЗЕКҪЖрЦШ»ъЧФ¶ҜФЛРРПөНіөДХыМејЬ№№Нј
Fig. 9 Overall structure diagram of electrolytic copper special craneЎҜs automatic operation system
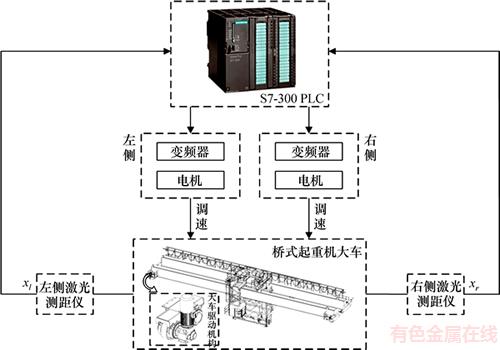
Нј10 ЗЕКҪЖрЦШ»ъҙуіөҫАЖ«ҝШЦЖПөНіҪб№№
Fig. 10 System structure of bridge crane deviation correction control system
5 ҪбВЫ
1) Хл¶ФЗЕКҪЖрЦШ»ъҙуіөөДЕЬЖ«ОКМвЈ¬ҪЁБўБЛЖдҫАЖ«¶ҜБҰС§ДЈРНЈ¬МбіцБЛТ»ЦЦ»щУЪЎ°ОуІоУЕ»ҜЎұС§П°Лг·ЁөДЧФККУҰН¬ІҪРӯөчҫАЖ«ҝШЦЖІЯВФЈ¬К№ҙуіөБҪІаЛЩ¶ИәНО»ТЖТФј°Ж«ЧӘҪЗөГөҪҝмЛЩҝШЦЖЎЈ
2) ҫАЖ«ҝШЦЖПмУҰЛЩ¶ИҝмЈ¬ОИ¶ЁРФәГЈ¬КХБІҝмЈ¬ҝШЦЖЖчҫАЖ«РФДЬБјәГЎЈФЪЙъІъПЦіЎЈ¬ЗЕКҪЖрЦШ»ъЧФ¶ҜҝШЦЖПөНіРФДЬБјәГЈ¬ФЛРРёЯР§ЎЈ
3) АыУГёГҫАЖ«ҝШЦЖІЯВФЈ¬ЗЕКҪЖрЦШ»ъҙуіөЕЬЖ«ПЦПуөГөҪУРР§ТЦЦЖЈ¬јИМбёЯБЛЗЕКҪЖрЦШ»ъҙуіөөДЧчТөР§ВКЈ¬УЦұЈЦӨБЛҙуіөФЛРРөДЖҪОИРФәН°ІИ«РФЎЈ
ІОҝјОДПЧЈә
[1] РмО°·ж, ЛОРЛәЈ. ҫАЖ«ҝШЦЖјјКхФЪЗЕЎўГЕКҪЖрЦШ»ъЦРөДУҰУГ[J]. ЖрЦШФЛКд»ъРө, 2014(1): 73-74.
XU Weifeng, SONG Xinghai. Application of corrective control technology in bridge and gantry cranes[J]. Hoisting and Transportation Machinery, 2014(1): 73-74.
[2] ҫ°і¬, »фАцДИ, АоПюГч. ҙуҝз¶ИГЕКҪЖрЦШ»ъөДөзЖшЧФ¶ҜҫАЖ«ПөНі[J]. ЦШ№ӨУлЖрЦШјјКх, 2016, 9(2): 23-24.
JING Chao, HUO Lina, LI Xiaoming. Electrical automatic deviation correction system for long-span gantry crane[J]. Heavy Industry & Lifting Technology, 2016, 9(2): 23-24.
[3] ERMIDORO M, COLOGNI A L, FORMENTIN S, et al. Fixed-order gain-scheduling anti-sway control of overhead bridge cranes[J]. Mechatronics, 2016, 39: 237-247.
[4] FATEHI M H, EGHTESAD M, AMJADIFARD R. Modelling and control of an overhead crane system with a flexible cable and large swing angle[J]. Journal of Low Frequency Noise Vibration & Active Control, 2015, 33(4): 395-410.
[5] LIU Ting, DU Yuxing, TONG Minming. Realization of drill rectifying control for coal shearer based on an improved PID algorithm[C]//IEEE International Conference on Mechatronics and Automation. Harbin, China, 2016: 32-36.
[6] ёЯС©БЦ, Т¶ил, ИОбҝбҝ, өИ. Л®ЖҪ¶ЁПтЧкөД№мјЈЧФ¶ҜҫАЖ«·Ҫ·Ё[J]. ЦРДПҙуѧѧұЁ(ЧФИ»ҝЖС§°ж), 2013, 44(1): 297-300.
GAO Xuelin, YE Hua, REN Zhengzheng, et al. Automatic deviation correction method for horizontal directional drilling[J]. Journal of Central South University (Science and Technology), 2013, 44(1): 297-300.
[7] SUN Jinghua, LIU Zhen, ZHAO Yuntao. Motion deviation rectifying method of dynamically measuring rail wear based on multi-line structured-light vision[J]. Optics & Laser Technology, 2013, 50(2): 25-32.
[8] РмТ«Бј, ХФНтҪЈ, НхІ©, өИ. ЧФККУҰДЈәэҝШЦЖФЪҫАЖ«ҝШЦЖЖчЦРөДУҰУГ[J]. ҝШЦЖ№ӨіМ, 2013, 20(2): 313-316, 323.
XU Yaoliang, ZHAO Wanjian, WANG Bo, et al. Application of adaptive fuzzy control in deviation correction controller[J]. Control Engineering, 2013, 20(2): 313-316, 323.
[9] БхиӘ, АоРЛёщ. ЗЕКҪЖрЦШ»ъҫАЖ«ҝШЦЖІЯВФөДСРҫҝ[J]. РВјјКхРВ№ӨТХ, 2010(10): 27-29.
LIU Jin, LI Xinggen. Research on the corrective control strategy of bridge crane[J]. New Technology & New Process, 2010(10): 27-29.
[10] ОвУсПг, НхҙП. »щУЪИ·¶ЁС§П°өД»ъЖчИЛИООсҝХјдЧФККУҰЙсҫӯНшВзҝШЦЖ[J]. ЧФ¶Ҝ»ҜС§ұЁ, 2013, 39(6): 806-815.
WU Yuxiang, WANG Cong. Self-adaptive neural network control for robot tasks based on deterministic learning[J]. Automation Journal, 2013, 39(6): 806-815.
[11] јЦәЧГщ, ХЕАыҫь, ЖлС©, өИ. »щУЪЙсҫӯНшВзөДЛ®ПВ»ъЖчИЛИэО¬әҪјЈёъЧЩҝШЦЖ[J]. ҝШЦЖАнВЫУлУҰУГ, 2012, 29(7): 56-62.
JIA Heming, ZHANG Lijun, QI Xue, et al. Three-dimensional track tracking control of underwater robot based on neural network[J]. Control Theory & Applications, 2012, 29(7): 56-62.
[12] SMOCZEK J. Fuzzy crane control with sensorless payload deflection feedback for vibration reduction[J]. Mechanical Systems & Signal Processing, 2014, 46(1): 70-81.
[13] іВПю·Ҫ, №рОА»Ә, ІМЧФРЛ, өИ. №эіМҝШЦЖЦРөДЦЗДЬјҜіЙҪЁДЈ·Ҫ·Ё[J]. ПөНі·ВХжС§ұЁ, 2001, 13(Z1): 8-11.
CHEN Xiaofang, GUI Weihua, CAI Zixing, et al. Intelligent integrated modeling method in process control[J]. Journal of System Simulation, 2001, 13(Z1): 8-11.
[14] іВПюЕф, АоіЙИЩ, Ао№ҰСа, өИ. »щУЪ¶ҜБҰС§ДЈРНөДВЦКҪТЖ¶Ҝ»ъЖчИЛөз»ъҝШЦЖ[J]. »ъЖчИЛ, 2008, 30(4): 326-332.
CHEN Xiaopeng, LI Chengrong, LI Gongyan, et al. The motor control of wheeled mobile robot based on dynamic model[J]. Robot, 2008, 30(4): 326-332.
[15] АЧҪъЙъ. ЧФ¶Ҝ»Ҝ№мөАЖрЦШ»ъЖ«РұРРЧЯІаПтБҰ·ЦОц[J]. ЖрЦШФЛКд»ъРө, 2016(3): 55-57.
LEI Jinsheng. Analysis of lateral forces in skew walking of automatic rail cranes[J]. Hoisting and Transportation Machinery, 2016(3): 55-57.
[16] SHU Huailin, HU Jintian. Study on multivariable system based on PID neural network control[J]. Advanced Materials Research, 2012(12): 591-593.
[17] іВКйЗ«, ХЕАцәз. BPЙсҫӯНшВзФЪPIDҝШЦЖЖчІОКэХы¶ЁЦРөДУҰУГ[J]. јЖЛг»ъ·ВХж, 2010, 27(10): 171-174.
CHEN Shuqian, ZHANG Lihong. Application of BP neural network in PID controller parameter tuning[J]. Computer Simulation, 2010, 27(10): 171-174.
[18] MA Bojun, FANG Yongchun, WANG Yutao. Adaptive control for an underactuated overhead crane system[J]. Control Theory and Applications, 2008, 25(6): 1105-1109.
[19] МЖГчЦй, Сфҙә»Ә, №рОА»Ә, өИ. ҙъјЫГфёРёЕВКЙсҫӯНшВзј°ЖдФЪ№КХПХп¶ПЦРөДУҰУГ[J]. ҝШЦЖУлҫцІЯ, 2010, 25(7): 1074-1078.
TANG Mingzhu, YANG Chunhua, GUI Weihua, et al. Cost-sensitive probabilistic neural network and its application in fault diagnosis[J]. Control and Decision, 2010, 25(7): 1074-1078.
(ұајӯ іВІУ»Ә)
КХёеИХЖЪЈә2017-10-12Ј»РЮ»ШИХЖЪЈә2017-12-22
»щҪрПоДҝ(Foundation item)Јә№ъјТЧФИ»ҝЖС§»щҪрЧКЦъПоДҝ(61673400);№ъјТЧФИ»ҝЖС§»щҪрҙҙРВСРҫҝИәМеПоДҝ(61621062)Ј»әюДПКЎХҪВФРФРВРЛІъТөҝЖјј№Ҙ№ШАаПоДҝ(2016GK4023)(Project(61673400) supported by the National Natural Science Foundation of China; Project(61621062) supported by the Foundation for Innovation Research Groups of the National Natural Science Foundation of China; Project(2016GK4023) supported by the Strategic Emerging Industry Technology Research Foundation of Hunan Province)
НЁРЕЧчХЯЈәАоУВёХЈ¬І©КҝЈ¬ҪМКЪЈ¬ҙУКВёҙФУ№эіМҪЁДЈУлУЕ»ҜҝШЦЖСРҫҝЈ»E-mailЈәliyonggang@mail.csu.edu.cn

