һ�ֻ����������㷨�ķ�����PID������
���÷1��������2
(1. ������ѧԺ ���������ӹ���ѧԺ������ ��ɳ��410205��
2. ��ɳ������ѧ ��������Ϣ����ѧԺ������ ��ɳ��410076)
ժ Ҫ����Է����ԡ���ȷ��ʱ�Ͷ������һ�ֻ����������㷨�ķ�����PID���������ÿ���������ͳPID�ı��������ֺ��ֲ����ֱ���ɹ�������źŵķ����Ժ��������������Ա������㵥Ԫ�������Ի������㵥Ԫ�ͷ����������㵥Ԫ�ֱ���Ϊ������Ԫ�ļ����������Ӷ����콫PID�����������������Ϊһ������ܿ��������о�������������ô����ܿ�������Ч����˴�ͳPID���Կ��Ʒ����Զ���������Լ���ͳ�����������������Ԫ�ڵ�������ȷ�������⣬��������֤�˸����ܿ���������Ч�ԡ�
�ؼ��ʣ������磻PID�������������Կ���
��ͼ����ţ�TP183 ���ױ�־�룺A ���±�ţ�1672-7207(2010)05-1865-06
A nonlinear PID controller based on neural network algorithm
LI Gui-mei1, ZENG Zhe-zhao2
(1. College of Computer and Electronic Engineering, Hunan University of Commerce, Changsha 410205, China;
2. College of Electrical and Information Engineering, Changsha University of Science and Technology,
Changsha 410076, China)
Abstract: Aiming at nonlinear and uncertain time-delay objects, a nonlinear PID controller based on neural network algorithm was proposed. The controller used nonlinear proportional, nonlinear integral and nonlinear differential functions on error signal as proportional, integral and differential parameters of traditional PID controller, and used nonlinear proportional operation unit, nonlinear integral operation unit and nonlinear differential operation unit as excitation functions of hidden layer neurons, which consists of PID controller and neural network controller. The results show that the intelligent controller effectively solves the control problem of nonlinear object and the problem of number of neurons of hidden layer and it is difficult for the traditional PID controller to solve and determine. Simulation results show the effectiveness of the intelligent controller.
Key words: neural network; PID controller; nonlinear control
����ϵͳ���ӳ̶ȵ���ߺͶ���ȷ�������ص����࣬��ͳ��PID�����Ѿ��������ã���������PID��������ʵ��ӳ��������ƫ���ź�֮��ķ����ԣ���һ���̶��Ͽ˷�������PID���Ƶ�ȱ�ݡ���10�����������������о��߽���������������PID�����������[1-9]��Ŀǰ���ɶ��ַ�ʽ�ϳɵķ�����PID��������Ҫ��ģ��ϵͳ[10]���˹�������[11]�Լ����ھ���ʽ�ķ����Ժ����趨[1-7, 9, 12-13]�ȡ���ԭ����˵�����������Ե��������Ϊ���ƹ��̴��������洦���粹�����ض���ķ����ԡ����ƿ������ܡ���߿���ϵͳ��³���Եȣ�Ϊ������������ṩ�µ����ɶȣ�����������Ӧ���о��нϸ���[9]������������£��о�һ����Ƽ�ʹ�÷���ķ�����PID������������Ҫ�����������Ӧ�ü�ֵ�����ھ���ʽ�ķ����Ժ����趨������ʹ����PID�������ı�������ϵ��Kp����������ϵ��Ki��������ϵ��Kd��Ϊƫ���ź�e(t)�ķ����Ժ�������Kp(e(t))��Ki(e(t))��Kd(e(t))��Ȼ������3�����������泣��PID��������3������ϵ����������ƫ���ź���Ϊ���ɷ����Ժ���Kp(e(t))��Ki(e(t))��Kd(e(t))�����ݣ������ɹ��̾�������ʲô���Ĺ��ɲ�û�й̶��Ĺ�ʽ�����ã������ǽ���������PID������ģ�͵Ĺؼ���Ҫ�õ������Ժ���Kp(e(t))��Ki(e(t))��Kd(e(t))��ȷ����ʽ�ܸ��ӣ��ڴˣ���������ͨ����������PID������ϵͳ���ɹ������仯������仯��ϵ[14]���ֱ�������������ֺ�����������������Ķ�̬�����Ժ������Ӷ���÷�����PID�Ŀ��� ģ�͡�
1 ������PID������ģ��
Kp��Ki��Kd 3�����������e(t)�仯�Ĺ�ϵ������ͼ1��ʾ[14]����Щ���߽�ʾ��Kp��Ki��Kd 3��������PID���ƹ����е����ú��������塣
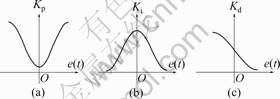
(a) Kp; (b) Ki; (c) Kd
ͼ1 PID 3��������������ı仯����
Fig.1 PID gain parameters of three curves with error
(1) Kp�������Ǽ�С���������ӿ����ԣ����Ҫ�����|e(t)|�ϴ�ʱ��KpҲ�ϴ�|e(t)|��Сʱ��KpҲ��С������ͼ1����Kp�������e(t)�Ķ�̬�����Ժ���Ϊ
 (1)
(1)
�� ʱ��
ʱ�� �����У�ϵ��w1����ƾ�������������ͨ������������ʵʱѵ����ȷ��������Ƕ�̬��ϵ��������ķ����Ժ���Kp(e(t))Ҳ�Ƕ�̬�ķ����Ժ�����
�����У�ϵ��w1����ƾ�������������ͨ������������ʵʱѵ����ȷ��������Ƕ�̬��ϵ��������ķ����Ժ���Kp(e(t))Ҳ�Ƕ�̬�ķ����Ժ�����
(2) Ki���������ۻ�ϵͳ���Լ�Сϵͳ��̬ƫ������Ҫ��|e(t)|�ϴ�ʱ��Ki��С����|e(t)|��Сʱ��Ki�ϴ�������������ȷ������ͼ1����Ki�������e(t)�Ķ�̬�����Ժ���Ϊ��
 (2)
(2)
��ʱ�� ��ͬ����ϵ��w2����ƾ�������������ͨ������������ʵʱѵ����ȷ��������Ƕ�̬��ϵ�����Ӷ�����ķ����Ժ���Ki(e(t))Ҳ�Ƕ�̬�ķ����Ժ�����
��ͬ����ϵ��w2����ƾ�������������ͨ������������ʵʱѵ����ȷ��������Ƕ�̬��ϵ�����Ӷ�����ķ����Ժ���Ki(e(t))Ҳ�Ƕ�̬�ķ����Ժ�����
����Ҫ�ر�ָ�����ǣ������ֻ��ֱ������ʱ��ͨ��ϵ��w2������Ӧ��������Ч������ֱ��͵������
(3) Kd������������ϵͳ���ᣬ��ϵͳ����ǰУ�����ﵽ���ϵͳ�ȶ��Ե�Ŀ�ģ����Ҫ��(e(t)��0)Խ��ʱ��KdԽ��Ƿ��(e(t)��0)Խ��ʱ��KdԽС�����ȶ�ֵ����(e(t)��0)ʱ��Kd���ڳ�����Ƿ��ʱ��֮�䡣��ˣ�����ͼ1����Kd�������e(t)�Ķ�̬�����Ժ���Ϊ
 (3)
(3)
��ʱ�� ��ͬ����ϵ��w3����ƾ�������������ͨ������������ʵʱѵ����ȷ��������Ƕ�̬��ϵ��������ķ����Ժ���Kd(e(t))Ҳ�Ƕ�̬�ķ����Ժ�����
��ͬ����ϵ��w3����ƾ�������������ͨ������������ʵʱѵ����ȷ��������Ƕ�̬��ϵ��������ķ����Ժ���Kd(e(t))Ҳ�Ƕ�̬�ķ����Ժ�����
����ʽ�Ͽ���ʽ(1)~(3)���ǹ�������ź�e(t)�Ķ��κ��������ǣ�����ϵ��w1��w2��w3���Ƕ�̬ϵ������ˣ���ʽ(1)~(3)����ķ����Ժ������и߶ȷ����ԣ����յó��Ķ�̬������PIDģ��Ϊ��
 (4)
(4)
��ʽ(1)~(3)����ʽ(4)���������ã�

 (5)
(5)
Ϊ�˱���CPU��������ʽ(5)��ɢΪ

 (6)
(6)
���У�TΪ�������ڣ���1����������T�ֱ�������ϵ��w2��w3�У�����

��ʽ(6)�ɼ�дΪ

 (7)
(7)
�� �����У������Ա�����Ϊup(e,w1)=w1e3(k)�������Ի�����Ϊ
�����У������Ա�����Ϊup(e,w1)=w1e3(k)�������Ի�����Ϊ
 ������������Ϊ
������������Ϊ ��
��
ʽ(7)��ʾ�ķ����Կ����ʸ�������ȷ���������壺�ڳ���(e(k)��0��e(k)�� -1)ʱ��������PID��������Ҫ�ɷ����Ա�����ͷ�����������������ã��������Ի���������ú�С����Ƿ��(e(k)��0��e(k)��1)ʱ����Ҫ�ɷ����Ա�������������ã�������������ͻ�����������ú�С�����ȶ�ֵ����(|e(k)|��С)ʱ����Ҫ�ɷ����Ի����������������ã��������Ա���������ú�С�����ںܴ�̶��ϱ�֤��ϵͳ�ڹ��ɹ�����PID���������仯������仯��ϵ��
2 ��̬������PID�����������ģ���㷨
2.1 ��̬������PID�����������ģ��
��ʽ(7)��֪������ ��u(k)�ֱ�Ϊ��������������������Զ�̬ϵ��w1��w2��w3Ϊ����Ȩֵ���Է����Ժ���e3(k)��[1-e2(k)]s(k)��[1-e(k)+0.5e2(k)]?e(k)Ϊ������Ԫ������������ɵõ��������˽ṹΪ1��3��1�Ķ�̬������PID���������������ģ����ͼ2��ʾ�����У�s1(k)=e3(k)��s2(k)= [1-e2(k)]s(k)��s3(k)= [1-e(k)+0.5e2(k)]?e(k)��s(k)= s(k-1)+e(k)��s(-1)=0��?e(k)=e(k)-e(k-1)��e(-1)=0��
��u(k)�ֱ�Ϊ��������������������Զ�̬ϵ��w1��w2��w3Ϊ����Ȩֵ���Է����Ժ���e3(k)��[1-e2(k)]s(k)��[1-e(k)+0.5e2(k)]?e(k)Ϊ������Ԫ������������ɵõ��������˽ṹΪ1��3��1�Ķ�̬������PID���������������ģ����ͼ2��ʾ�����У�s1(k)=e3(k)��s2(k)= [1-e2(k)]s(k)��s3(k)= [1-e(k)+0.5e2(k)]?e(k)��s(k)= s(k-1)+e(k)��s(-1)=0��?e(k)=e(k)-e(k-1)��e(-1)=0��
��̬������PID�����������ģ����ͼ2��ʾ����ͼ2��֪�������о��Ķ�̬������PID��������������������˳���PID�������ṹ���ص㣬���ҹ�����PID���������������źŵĶ�̬�����Ժ�������Ϊw1��w2��w3�Ƕ�̬Ȩֵ�����ʵ����PID��������ĸ߶ȷ����ԣ�������ֱ����뵽3
��������Ԫ�У�ͨ���������ʵʱ����ѵ������ȡȨֵϵ������Ч�����˳��������������������Ԫ�ڵ�������ȷ�������⡣
2.2 ��̬������PID������������㷨
��ͼ2��֪��ϵͳ��ʼ����Ϊ��E(k)= r(k)-y(k)��ͨ��������ֵ�����ɵù�һ������ź�e(k) (������PID���������ܿ������������ź�)Ϊ
 (8)
(8)
��������ָ��Ϊ��
 (9)
(9)
����
 (10)
(10)
������ѵ����Ŀ�ľ���ʹ����ָ��J��С���� ��Ϊ�ˣ���������PID������������뱻�ض���
��Ϊ�ˣ���������PID������������뱻�ض���
 (11)
(11)
��Ϊһ�����壬ͨ�������������u(k) (��ʽ(7))����ʽ�е�Ȩֵϵ�����Ż���ʹ����ָ��J��С�����������½���������Ȩֵѵ���㷨���£�
 ; j=1, 2, 3 (12)
; j=1, 2, 3 (12)
��ʽ(7)~(11)�ɵã�
 (13)
(13)
��Ϊ ��
�� ��
��
 ��
�� ��
��

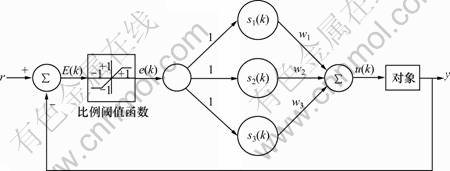
ͼ2 ��̬������PID�����������ģ��
Fig.2 A controller model of dynamic nonlinear PID neural network
 ���ֱ����ʽ(13)���ɵã�
���ֱ����ʽ(13)���ɵã�
 (14)
(14)
 (15)
(15)
 (16)
(16)
��ʽ(14)~(16)����ʽ(12)���ɵã�
 (17)
(17)
 (18)
(18)

 (19)
(19)
���� ��
�� ��
��
 ��
�� ��
�� Ϊѧϰ�ʣ�0����1��
Ϊѧϰ�ʣ�0����1�� ��
��
2.3 ������PID�������㷨
��ʽ(17)~(19)��֪�� ��
��
 ����ϵͳ��δ�����
����ϵͳ��δ����� (δ֪)�йأ������������Ȩֵѵ��ʱ����ּ����������⡣�����������о��߲��ñ��ض����ģ�ͱ�ʶ��������������⣬���ǣ�������Ҳ��ʵʱ�Բ���Ҷ���ʱ��ϵͳ��ģ�ͱ�ʶ����ʵ�֡�
(δ֪)�йأ������������Ȩֵѵ��ʱ����ּ����������⡣�����������о��߲��ñ��ض����ģ�ͱ�ʶ��������������⣬���ǣ�������Ҳ��ʵʱ�Բ���Ҷ���ʱ��ϵͳ��ģ�ͱ�ʶ����ʵ�֡�
���㷨�������ģ������|E(k+1)|��|E(k)|���� |e(k)|��|E(k)|����ֻҪ����|E(k+1)|��|e(k)|���ɱ�֤�㷨�����ġ��ݴˣ��� ����0��
����0�� ��1��������ͨ��ѧϰ��
��1��������ͨ��ѧϰ�� ���ֲ�����ˣ��ɽ�������ѧϰ���С�
���ֲ�����ˣ��ɽ�������ѧϰ���С�
���⣬�÷��ź�������� Ҳ�ǿ��еġ���Ϊ����ŵ�����ֻ����Ȩֵ�仯�ķ�������ֵֻӰ��Ȩֵ�ı仯�ٶȣ���Ȩֵ�仯�ٶ�Ҳ��ͨ��ѧϰ���ֲ�����
Ҳ�ǿ��еġ���Ϊ����ŵ�����ֻ����Ȩֵ�仯�ķ�������ֵֻӰ��Ȩֵ�ı仯�ٶȣ���Ȩֵ�仯�ٶ�Ҳ��ͨ��ѧϰ���ֲ�����
 (20)
(20)
��ʽ(17)~(19)�ɸ�дΪ��
 (21)
(21)
 (22)
(22)
 (23)
(23)
��������ѧϰ���С�Ϊ����Ч������Ȩֵ��������������ѵ�������г���������ͨ����Ȩֵ���й�һ����������
 ��j=1, 2, 3 (24)
��j=1, 2, 3 (24)
��ʽ(21)~(23)��֪��Ȩֵ�ļ���ֻ�뵱ǰ����ʷ��ϵͳ����(r(k)��r(k-1))�����(y(k)��y(k-1))�Լ���ʷ�����ź�(u(k-1)��u(k-2))�йأ������Ч�����Ȩֵ�������⡣���ڱ����о��ķ�����PID�����������ֻ�漰�˷��ͼӷ����㣬����CPU��������ˣ������������С������ʵ��Ӧ�á�
2.4 �㷨������
Ϊ�˱�֤ϵͳ�ȶ�������������㷨�������Խ��������о����Ա�Ϊȷ��ѧϰ���ṩ�������ݣ�����ѡ��ѧϰ�ʵ�äĿ�ԡ�
����1 ���ҽ���ѧϰ������ ʱ�������о����������㷨�������ġ����У���
ʱ�������о����������㷨�������ġ����У���
֤�� ȡLyapunov����Ϊ��


����

��Ϊ ����ˣ�
����ˣ�
 (25)
(25)
���� ����ʽ(10)��ʽ(7)�ɵã�
����ʽ(10)��ʽ(7)�ɵã�
 ��
��
 ,
,

��ʽ(21)~(23)�ɵã�
 ��
�� ��
��

���ǣ��У�

 (26)
(26)
����ʽ(26)����ʽ(25)���������ɵã�
 (27)
(27)
����
 ��
��
��ʽ(27)֪��Ҫʹ�������㷨��������������ʽ������
 (28)
(28)
�� ����
���� �����ԣ�
�����ԣ� ������֤����1.25��p(k)��s2(k)����0����1������������ѧϰ���С���ˣ���ѧϰ��ʱ����Ԫ�㷨�������ģ�֤�ϡ�
������֤����1.25��p(k)��s2(k)����0����1������������ѧϰ���С���ˣ���ѧϰ��ʱ����Ԫ�㷨�������ģ�֤�ϡ�
��������ѵ��ʱ��ͨ��ȡѧϰ�� ��
��
2.5 �㷨����
(1) ������Ȩֵ��ʼ����wj=0(j=1, 2, 3)����s(-1)=0��e(-1)=0��u(m)=0��y(m)=0(m=-1, -2, ��)��
(2) ����ϵͳ��ʼ��E(k)=r(k)-y(k)����ʽ(8)�����һ�����e(k)��
(3) �ֱ�����ۻ����Ͳ�֣�s(k)=s(k-1)+e(k)��?e(k)=e(k)-e(k-1)��
(4) ��ʽ(20)������Ų��� ��������ѧϰ����
��������ѧϰ����
(5) ��ʽ(21)~(23)���Ƽ���������Ȩֵϵ��w1��w2��w3����ʽ(24)��Ȩֵ���й�һ��������
(6) ��ʽ(7)���������PID�������Ŀ�����u(k)����
(7) ���ز���(2)�ظ�����������̣���ʵ�ַ�����PID���������ܿ�����������ʵʱ�Ż����� ���̡�
3 ������
Ϊ����֤��̬������PID���������ܿ���������Ч�ԣ�ѡ������[15]�еĶ���A��B���з���ʵ���о���
��1 ����A��1��һ���Դ��ͺ��ն����� ���䴫�ݺ���Ϊ[15]
���䴫�ݺ���Ϊ[15]
������[15]��֪�������ó�������㷨���Ƹö�������ѻ������Ŀ���Ч�����ڱ����㷨�У�ʹȨֵ�ij�ʼֵΪ0������ѧϰ��=2��10-3����������Ϊ 0.1 s��ͨ��������ʵʱ����ѵ�������������ͼ3(a)��ʾ������[15]�еķ�������ͼ3(b)��ʾ��
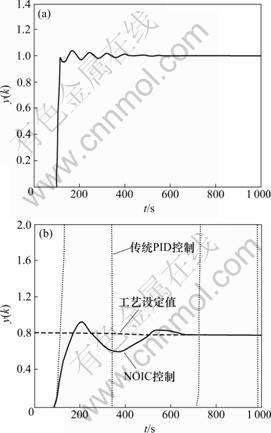
(a) ���ķ�������(b) ����[15]�з�����
ͼ3 ʵ��1������
Fig.3 Simulation results of example 1
��ͼ3��֪�����ñ��ķ���������ʱ��ԼΪ 400 s��������NOIC����[15]����Ҫ650 s����ͼ3(b)����֪��ʹ�ô�ͳPID���Ʒ������Ըö���ʵ����Ч���ơ�
��2 ����B��1�������Զ�������ɢ������Ϊ[15]��

���У�u(k)��y(k)�ֱ��DZ��ض�������������������ڱ����㷨�У�ʹȨֵ�ij�ʼֵΪ0������ѧϰ��Ϊ=2��10-4�����������Ϊ0.1 s��ͨ������������ѵ�������������ͼ4(a)��4(b)��ʾ���ҳ�����Ϊ1.33��10-13%����̬���Ϊ0������ʱ��Ϊ5 s��������[15]�еķ�������ͼ4(c)��ʾ��������Ϊ15%����̬���Ϊ0������ʱ��Ϊ10 s��
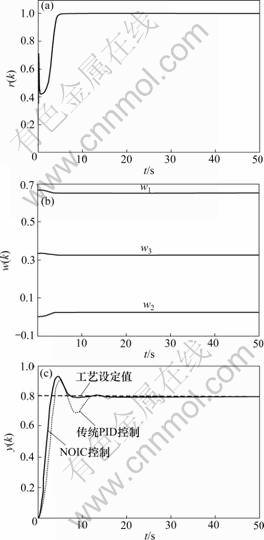
(a) ��λ��Ծ��Ӧ��(b) Ȩֵϵ��ʵʱ�Ż������
(c) ����[15]�����
ͼ4 ʵ��2������
Fig.4 Simulation results of example 2
4 ����
(1) ͨ����������PID������ϵͳ���ɹ������仯������仯��ϵ���ֱ�����˱��������ֺ������������������źŵĶ��η����Ժ���������������3����������ķ����Ժ���ģ�ͣ�����ͨ������������ѵ��ʹ3����������ķ����Ժ���ģ�ͷֱ���Ȩֵw1��w2��w3ʵʱ��̬�仯���Ӷ���ý���̬������PID�����������������Ϊһ������ܿ���ģ�͡�
(2) �������������֤�˱��Ļ����������㷨�ķ�����PID����������Ч�ԡ��봫ͳPID��������ȣ����ñ��ķ�����������������С������ʵ��Ӧ�ã����ҳ���С������ʱ��̡�
�ο����ף�
[1] HAN Jin-qin. Nonlinear PID controller[J]. Acta Automatica Sinica, 1994, 20(4): 487-490.
[2] CHENG Zhong, YAN Wei, LI Zu-shu, et al. HSIC-based nonlinear PID controller[J]. Control and Decision, 2003, 18(6): 694-697.
[3] XU Ying, Hollerbach J M, Ma D. A nonlinear PD controller for force and contact transient control[J]. IEEE Control Systems Magazine, 1995, 15(1): 15-21.
[4] Shahruz S M, Schwartz A L. Nonlinear PI Compensators that achieve high performance[J]. Journal of Dynamic Systems Measurement and Control, 1997, 119: 105-110.
[5] HU Bao-gang, Mann G KI, Gosine R G. Control curve design for nonlinear (or fuzzy) proportional actions using spline-based functions[J]. Automatica, 1998, 34(9): 1125-1133.
[6] Bucklaew T P, LIU Chun-sha S. A new nonlinear gain structure for PD-type controllers in robotic applications[J]. Journal of Robotic Systems, 1999, 16(11): 627-649.
[7] Armstrong B, Neevel D, Kusik T. New results in NPID control: Tracking, integral control, friction compensation and experimental results[J]. IEEE Transactions on Control Systems Technology, 2001, 9(2): 399-406.
[8] GAO Zhen. From linear to nonlinear control means: a practical progression[J]. ISA Transactions, 2002, 41(2): 177-189.
[9] ������. ������PID�������о�: �������ķ����Է���[J]. �Զ���ѧ��, 2006, 32(2): 219-227.
HU Bao-gang. A study on nonlinear PID controllers: Proportional component approach[J]. Acta Automatica Sinica, 2006, 32(2): 219-227.
[10] HU Bao-gang, YING Hao. Review of fuzzy PID control techniques and some important issues[J]. Acta Automatica Sinica, 2001, 27(4): 567-584.
[11] Ruano A E B, Fleming P J, Jones D I. Connectionist approach to PID autotuning[J]. IEE Proceedings D: Control Theory and Applications, 1992, D139(3): 279-285.
[12] ����, �ް�, ����. һ�ֻ����Ŵ��㷨�ķ�����PID������[J]. ���������, 2005, 20(4): 448-454.
HAN Hua, LUO An, YANG Yong. A nonlinear PID controller based on genetic tuning algorithm[J]. Control and Decision, 2005, 20(4): 448-454.
[13] ������, Ҧ��ͤ, ���. ������PID�������о�[J]. �б���ѧѧ��: ��Ȼ��ѧ��, 2006, 27(5): 423-425.
GUO Yan-qing, YAO Zhu-ting, WANG Nan. The study on non-linear PID controller[J]. Journal of North University of China: Natural Science Edition, 2006, 27(5): 423-425.
[14] ������. �Ƚ�PID���Ƽ���MATLAB����[M]. ����: ���ӹ�ҵ������, 2003: 20-80.
LIU Jin-kun. Advanced PID control and MATLAB simulation[M]. Beijing: Electronic Industry Press, 2003: 20-80.
[15] ����, ������, ������. ����NEI���ڻ����ķ����������Ż�������[J]. ���������, 2008, 23(10): 1159-1162.
LIU Bao, DING Yong-sheng, WANG Jun-hong. Nonlinear optimized intelligent controller based on modulation of NEI system[J]. Control and Decision, 2008, 23(10): 1159-1162.
(�༭ �²ӻ�)
�ո����ڣ�2010-01-03�������ڣ�2010-04-15
������Ŀ������ʡ�Ƽ��ƻ���Ŀ(2010GK3035��2009GK3186)������ʡ�������ص���Ŀ(08A006)����ɳ�пƼ��ƻ���Ŀ(K0904040-11)
ͨ�����ߣ����÷(1965-)��Ů��������Դ�ˣ������ڣ�����������Ϣ����������ϵͳ����о����绰��0731-88689238��E-mail: liggmm@126.com

