图5 z=350 mm时的条件数分布
Fig. 5 Condition number distribution when z=350 mm
同时,选取不同z输出机构所在工作空间平面的全局刚度分布图,分别如图6和图7所示。可见,随着z的增大,4UPU-R并联机构在给定工作空间内的全局刚度逐渐减小,但整个工作区的刚度平均值可以达到500 kN/m,且呈现工作空间横截面内中间高边缘低的趋势,符合机构正常使用习惯,完全可以适应不同的工作任务。
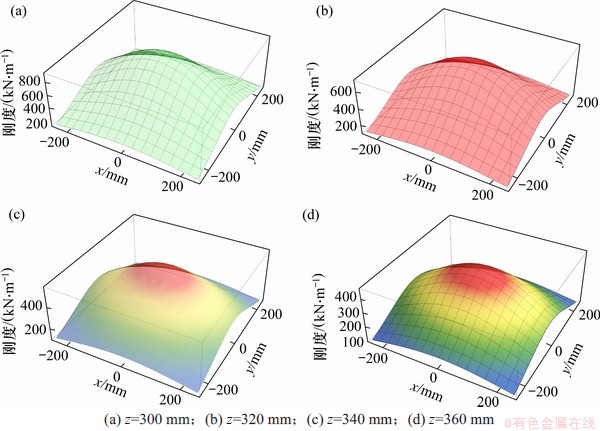
图6 不同z下的刚度分布情况
Fig. 6 Stiffness distribution along different cross sections

图7 不同z下的刚度分布比较
Fig. 7 Stiffness distribution comparison along different cross sections
4 应用分析
4.1 结构角确定方法
4UPU-R并联机构可改变自身结构参数以适应不同任务的特性,而结构参数的改变是通过机构自身结构角的变化来完成。该特性可使机构以最小的工作空间体积包络任务所需区域,提高工作空间的利用率。以机构需拥有多重任务适应性为目标,本文提出一种基于运动学解算确定结构角的方法,其流程图如图8所示,具体步骤如下:
1) 根据给定的任务轨迹,以一长方体或球体等规则立体图形包络任务轨迹,以该规则立体图形为任务工作空间区域;
2) 在任务工作空间表面选取关键点,关键点的选取原则为:动平台中心在处于该点时,至少1个驱动处于极限驱动值,即动平台中心点处于关键点时,至少1条运动支链的长度为最大或最小值;
3) 动平台位于每个关键点时,将该点坐标及对应的驱动长度li代入杆长约束方程式(4)中,解出相应的一组α;

图8 结构角确定流程图
Fig. 8 Schematic diagram of structure angle determination
4) 最终α的选取原则如式(12)所示:

 (12)
(12)
其中:n为关键点总数;αj为第j个α的取值;Vp为α=p时的实际工作空间体积;α1≤p≤αn。对比验证机构实际工作空间对任务工作空间的包络特性。若机构实际工作空间不能完全包络任务工作空间,则在未包络区域适当加入关键点,再次重复步骤1)和2)。
由于4UPU-R并联机构的固有结构特性,当结构角为90°(α=45°)时,机构实际工作空间体积达到最大值。故当步骤3)得到的计算结果中存在α=45°这一情况时,可直接确定α为45°;当结果中不存在α=45°这一情况时,可根据式(12)进行判定。
4.2 任务轨迹规划仿真
下面以实例说明结构角确定方法的合理性。针对工业生产线箱体分拣运输等应用背景,设任务为抓取放置类弧轨迹。任务示意图如图9所示,其中曲线为执行分拣的任务轨迹。首先对该任务轨迹进行运动区域划分,见图10(a),在任务轨迹中标定3个点位T1,T2和T3,其中T1和T3分别为该抓取放置轨迹中的抓取点和放置点,T2为轨迹中点。设定T1→T2段轨迹为S1,T2→T3段轨迹为S2,S1与S2在z方向和x-y平面上的分量分别为S1z,S2z和S1′和S2′,方向如图10(a)所示。标定点坐标为:
 ,
, (0,5,290),
(0,5,290), ,总运动时间为9.5 s,机构参数与第3节中的相同。
,总运动时间为9.5 s,机构参数与第3节中的相同。
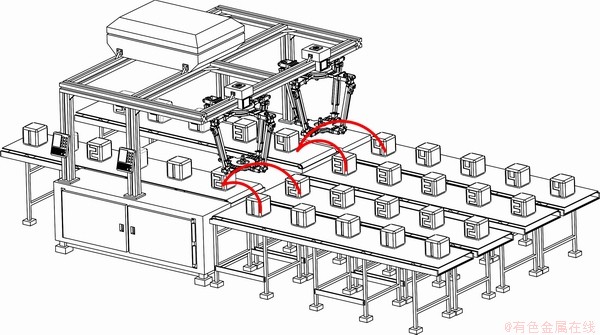
图9 箱体分拣应用示意图
Fig. 9 Diagram of box sorting
接下来选择一长方体对任务轨迹进行包络,T1与T3点位于长方体上平面对角线两端点,T2位于下平面中心点,则任务工作空间建立完成,见图10(b)。如机构实际工作空间需完全包络任务工作空间,则该长方体顶点需位于工作空间表面或内部,故将长方体顶点设置为关键点K1~K8。确定关键点后,根据给定步骤计算α,以K2和K8点为例,当动平台中心点位于K2和K8时,支链1驱动长度应分别取最大和最小值,同理,将各关键点坐标和对应驱动支链长度代入式(4)可解出一组α,计算结果如表1所示。鉴于任务区域与构型的关系,每条支链只需计算使之达到最大和最小驱动值的关键点对应的α即可。图11(a)所示为机构与任务工作空间的相对位置,也表现了各支链与关键点间的对应关系。
根据4.1节中的选择原则,最终确定α=45.37°,此时的机构实际工作空间对任务工作空间包络示意图如图11(b)所示,可见实际工作空间可实现对任务工作空间的完全包络。以上分析过程可看出,该方法可根据任务确定结构角以实现对任务工作空间的完全包络。对任务轨迹的包络原则可适应复杂轨迹,具有一定的多任务普适性。

图10 任务轨迹示意图
Fig. 10 Diagram of task trajectory

图11 任务工作空间示意图
Fig. 11 Diagram of desired workspace
表1 结构角计算结果
Table 1 Calculation results of structure angle (°)

下面针对此结构角下的构型进行任务轨迹仿真。设动平台中心点分别在时间t1,t2,t3时经过标定点T1,T2和T3。am(tn),vm(tn),sm(tn)分别为动平台中心点在时间tn时的加速度、速度、位移。故当动平台经过3个标定点时,n=1,2,3;m=1z,2z,1′,2′。S1与S2分别经历加速与减速过程,结合运动稳定性考虑,可将加速度变化方程设为时间t的一次函数,则各运动参数方程形式可由式(13)得到,其中k1b(b=1,2,3,4,5)为时间t的系数。对3个标定点在S1与S2行程的运动参数关系式相互联立,可解出S1与S2的解析表达式。图12所示为动平台在执行任务轨迹时,xyz这3个方向上的位移变化曲线。

图12 动平台位移变化曲线
Fig. 12 Change curves of moving platform′s motion
 (13)
(13)
将以上运动参数代入机构仿真模型,给定动平台中心点运动参数,完成抓取放置动作轨迹,输出机构驱动支链的长度变化曲线,如图13所示。从图12和13可看出:当机构执行任务所需轨迹时,动平台与运动支链的运动曲线均无突变尖点,任务过程中对机构整体无冲击,证明该轨迹规划和机构结构设计是合理的,且机构的参数确定方法可适应相关任务需求。
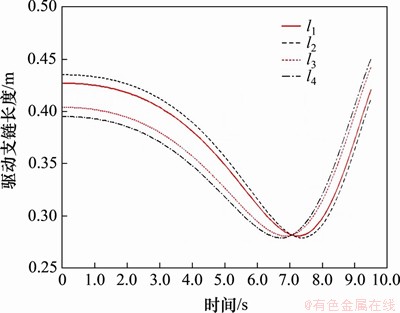
图13 驱动支链长度变化曲线
Fig. 13 Change curves of motion branches length
5 结论
1) 提出了一种可用于箱体分拣的新型三自由度冗余驱动并联机构。通过中心转动副的加入实现了其工作空间的可变性,并确定了其动平台的运动性质。
2) 通过含位置解、雅克比、奇异性在内的运动学分析,以及包括工作空间、灵巧度、刚度的性能分析,证明了该新型变工作空间并联机构具有多重任务适应性。
3) 提出了具有任务适应性、基于运动学解算的机构参数确定方法。通过以工业生产线箱体分拣为背景的任务轨迹规划仿真,验证了机构设计的合理性及方法的普适性。
参考文献:
[1] 刘知辉, 牛军川, 周一群. 3-CRR型并联机构运动学与奇异性分析[J]. 中南大学学报(自然科学版), 2017, 48(5): 1190-1197.
LIU Zhihui, NIU Junchuan, ZHOU Yiqun. Kinematics and singularity analysis of 3-CRR parallel mechanism[J]. Journal of Central South University(Science and Technology), 2017, 48(5): 1190-1197.
[2] 杨会, 房海蓉, 方跃法. 一种新型并联灌注机器人动力学分析与仿真[J]. 中南大学学报(自然科学版), 2019, 50(9): 2118-2127.
YANG Hui, FANG Hairong, FANG Yuefa. Dynamics analysis and simulation of a novel parallel perfusion robot[J]. Journal of Central South University(Science and Technology), 2019, 50(9): 2118-2127.
[3] 李典, 郭盛, 黄冠宇, 等. 新型2-2PRUR并联机构运动学分析及工作空间优化[J]. 北京航空航天大学学报, 2017, 43(10): 2011-2020.
LI Dian, GUO Sheng, HUANG Guanyu, et al. Kinematic analysis and workspace optimization of a novel 2-2PRUR parallel mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10): 2011-2020.
[4] QU Haibo, FANG Yuefa, GUO Sheng, et al. A novel 4-UPU translational parallel mechanism with fault-tolerant configurations[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2014, 228(16): 3006-3018.
[5] GOSSELIN C, SCHREIBER L T. Kinematically redundant spatial parallel mechanisms for singularity avoidance and large orientational workspace[J]. IEEE Transactions on Robotics, 2016, 32(2): 286-300.
[6] GUO Sheng, YE Wei, QU Haibo, et al. A serial of novel four degrees of freedom parallel mechanisms with large rotational workspace[J]. Robotica, 2016, 34(4): 764-776.
[7] LI Dian, GUO Sheng, QU Haibo, et al. Kinematic analysis and optimization of a novel 6-DOF motion simulator mechanism[J]. International Journal of Robotics and Automation, 2017, 32(6): 625-638.
[8] COPPOLA G, ZHANG D, LIU K. A 6-DOF reconfigurable hybrid parallel manipulator[J]. Robotics and Computer-Integrated Manufacturing, 2014, 30(2): 99-106.
[9] KANG Xi, DAI J S. Relevance and transferability for parallel mechanisms with reconfigurable platforms[J]. Journal of Mechanisms and Robotics, 2019, 11(3): 031012. DOI: 10.1115/1.4042629.
[10] VIEGAS C, TAVAKOLI M, DE ALMEIDA A T. A novel grid-based reconfigurable spatial parallel mechanism with large workspace[J]. Mechanism and Machine Theory, 2017, 115: 149-167.
[11] HUANG Guanyu, GUO Sheng, ZHANG Dan, et al. Kinematic analysis and multi-objective optimization of a new reconfigurable parallel mechanism with high stiffness[J]. Robotica, 2018, 36(2): 187-203.
[12] PALPACELLI M, CARBONARI L, PALMIERI G. Details on the design of a lockable spherical joint for robotic applications[J]. Journal of Intelligent and Robotic Systems, 2016, 81(2): 169-179.
[13] FU Jianxun, GAO Feng. Designing a novel three-degree-of-freedom parallel robot based on workspace:[J]. International Journal of Advanced Robotic Systems, 2016, 13(1): 31.
[14] LIANG Dong, SONG Yimin, SUN Tao, et al. Optimum design of a novel redundantly actuated parallel manipulator with multiple actuation modes for high kinematic and dynamic performance[J]. Nonlinear Dynamics, 2016, 83(1/2): 631-658.
[15] LIU Sheng, QIU Zhicheng, ZHANG Xianmin. Singularity and path-planning with the working mode conversion of a 3-DOF 3-RRR planar parallel manipulator[J]. Mechanism and Machine Theory, 2017, 107: 166-182.
[16] LI Dian, GUO Sheng, QU Haibo. A novel multiple working modes parallel mechanism with variable workspace[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2020, 234(1): 211-224.
[17] 赵铁石, 陈江, 王家春, 等. 4-UPU并联机器人机构及其运动学[J]. 中国机械工程, 2005, 16(22): 2034-2038.
ZHAO Tieshi, CHEN Jiang, WANG Jiachun, et al. 4-UPU parallel manipulator mechanism and kinematics[J]. China Mechanical Engineering, 2005, 16(22): 2034-2038.
[18] 黄真, 孔令富, 方跃法. 并联机器人机构学理论及控制[M]. 北京: 机械工业出版社, 1997: 46-65.
HUANG Zhen, KONG Lingfu, FANG Yuefa. Theory and control of parallel manipulator[M]. Beijing: Mechanical Industry Press, 1997: 46-65.
[19] FANG Yuefa, TSAI L W. Feasible motion solutions for serial manipulators at singular configurations[J]. Journal of Mechanical Design, 2003, 125(1): 61-69.
(编辑 伍锦花)
收稿日期: 2020 -01 -27; 修回日期: 2020 -04 -27
基金项目(Foundation item):国家自然科学基金资助项目(51875033)(Project(51875033) supported by the National Natural Science Foundation of China)
通信作者:郭盛,教授,博士生导师,从事并联机构学研究;E-mail:shguo@bjtu.edu.cn