DOI: 10.11817/j.issn.1672-7207.2018.11.032
车联网环境下巡航控制系统对交通流油耗的影响
秦严严1, 2, 3, 4,王昊1, 2, 3,陈全1, 2, 3,冉斌3, 4
(1. 城市智能交通江苏省重点实验室,江苏 南京,210096;
2. 现代城市交通技术江苏高校协同创新中心,江苏 南京,210096;
3. 东南大学 交通学院,江苏 南京,210096;
4. 威斯康星大学麦迪逊分校 土木与环境工程系,威斯康星州 麦迪逊,53706)
摘要:为研究未来车联网环境下联网巡航控制(CCC)系统对交通流油耗的影响,选取Helly跟驰模型作为手动驾驶车辆跟驰模型,基于CCC车辆跟驰特性,构建多前车反馈的CCC跟驰模型;推导CCC系统的扰动传递函数,计算CCC系统关于反馈系数与平衡态速度的稳定域;针对高速公路上匝道瓶颈,考虑CCC车辆与手动驾驶车辆混合行驶中的随机性,在不同的主路需求与匝道需求情况下设计数值仿真实验,评估CCC车辆对交通流油耗的影响。研究结果表明:当CCC系统稳定时,CCC车辆有利于降低交通流油耗,当CCC车辆比例达到约60%时,油耗降低速度较快,相比于传统手动车辆交通流,CCC车辆交通流油耗降低约35%以上;当CCC系统不稳定时,交通流油耗降低率小于3.59%;CCC系统稳定域能够影响交通流油耗降低。
关键词:交通流;油耗;联网巡航控制;跟驰模型;车联网
中图分类号:U491.112 文献标志码:A 文章编号:1672-7207(2018)11-2894-07
Impacts of connected cruise control systems on traffic flow fuel consumption in internet of vehicles environment
QIN Yanyan1, 2, 3, 4, WANG Hao1, 2, 3, CHEN Quan1, 2, 3, RAN Bin3, 4
(1. Jiangsu Key Laboratory of Urban Intelligent Transportation System, Nanjing 210096, China;
2. Jiangsu Province Collaborative Innovation Center of Modern Urban Traffic Technologies, Nanjing 210096, China;
3. School of Transportation, Southeast University, Nanjing 210096, China;
4. Department of Civil and Environment Engineering, University of Wisconsin-Madison, Madison 53706, USA)
Abstract: In order to study the impacts of connected cruise control (CCC) systems on traffic flow fuel consumption of traffic flow in the future internet of vehicles environment, the Helly model was selected as the car-following model of manual driven vehicles. Based on the car-following characteristics of CCC vehicles, a CCC car-following model was built considering multiple preceeding feedbacks. The transfer function of perturbations of CCC systems was deduced. Then, the stability region about feedback coefficient and equilibrium velocity was calculated for CCC systems. The bottleneck of highway with an on-ramp was selected for numerical simulations. The simulation experiments were designed under different demands of both main road and ramp, taking the randomness in the mixed driving with CCC vehicles and manual driven vehicles into consideration. The impact of CCC vehicles on fuel consumption was evaluated. The results show that CCC vehicles can reduce the fuel consumption when the CCC system is stable. The reduction speed of fuel consumption becomes faster when CCC vehicle proportion reaches to 60%. The traffic flow with CCC vehicles can reduce fuel consumption by more than 35%, compared with that of traditional manual driven vehicles. However, the reduction of the fuel consumption is less than 3.59% if the CCC system is unstable. The reduction of fuel consumption is influenced by the stability region of the CCC system.
Key words: traffic flow; fuel consumption; connected cruise control; car-following model; internet of vehicles
近年来,交通能源消耗以及尾气污染问题凸显,有关车辆节能减排的研究日益受到关注。随着智能交通系统与自动驾驶汽车技术的发展,车联网环境下的智能驾驶系统车辆可实时获取前方行车状态,有效提升交通流平稳性,为车辆节能减排等问题的有效解决提供了新的途径。目前,智能驾驶系统车辆的大规模实地测试难以开展,因此,智能驾驶系统车辆与传统手动驾驶车辆混合行驶时的交通流特性研究是现阶段评估智能驾驶系统车辆有效解决相关交通问题的必要途径,且已成为国际上交通流理论以及智能交通领域的研究热点[1]。在各类型智能驾驶系统车辆的研究中,自适应巡航控制(adaptive cruise control,ACC)系统车辆依靠车载检测设备获取前车行车信息,可有效缩短车头时距;而协同自适应巡航控制(cooperative adaptive cruise control,CACC)系统车辆应用车载无线通信系统,在获取前车行车状态时,精度更高、速度更快,但CACC车辆仍然没有充分体现出车联网的特性。在车联网环境下,车车互联的特性进一步推动联网巡航控制(connected cruise control, CCC)系统的发展。CCC车辆在车联网环境下获取多前车行车状态,形成CCC控制系统。目前,人们对ACC车辆与CACC车辆对交通流特性的影响研究较多[2]。秦严严等[3]对ACC车辆、CACC车辆以及手动驾驶车辆这3种车型混合行驶时的混合交通流通行能力进行了理论分析,其研究结果表明:当CACC车辆在混合交通流中的比例大于60%时,可有效提升传统手动驾驶交通流的通行能力,ACC车辆的期望车间时距对通行能力的提升有一定影响;进一步地,秦严严等[4]研究了这3种车型混合交通流驾驶舒适性与交通流稳定性之间的关系,发现不同CACC车辆比例下的混合交通流稳定性会影响混合交通流驾驶的舒适性;ZHOU等[5]研究了CACC车辆在高速公路匝道瓶颈汇入时的交通安全特性,其研究结果表明在合理的匝道汇入控制策略下,CACC车辆能够起到平滑交通扰动的作用,进而可提升交通安全水平;GE等[6]针对CCC系统,分析了跟驰模型参数、CCC车辆通信延时以及CCC系统的车间通信方式对交通流稳定性的影响,但没有进一步地研究CCC车辆对交通问题的改善作用;QIN等[7]改进了CCC车辆模型,研究了CCC车辆反馈系数的输出控制与系统稳定域之间的关系。然而,目前有关CCC车辆系统对交通流油耗的影响的研究较少,而交通流油耗降低与节约资源以及降低交通环境污染等直接相关,因此,研究CCC车辆系统对交通流油耗的影响具有重要意义。为此,本文作者从CCC系统跟驰特性出发,基于跟驰模型理论分析CCC系统稳定性,并通过数值仿真实验探索未来大规模CCC系统对交通流油耗的影响。
1 联网巡航控制系统
1.1 系统概述
车联网环境下车与车之间实现车车无线通信,CCC车辆可基于车车通信技术感知多前车行驶速度及加速度等信息,并与其所监测的前方多辆手动车辆构成CCC系统[6]。1辆CCC车辆与m辆手动车辆构成的CCC系统见图1。其中,车辆n-1表示车辆n的前车,尾车CCC车辆可接收前方m辆手动车辆的行车信息反馈,k1为CCC车辆关于手动车辆n-1的反馈系数,k2为CCC车辆关于手动车辆n-2的反馈系数,km为CCC车辆关于手动车辆n-m的反馈系数。在CCC车辆与手动车辆混合行驶的交通流中,2种车型车辆位置分布的随机性使得每个CCC系统中的m取值是不同的,m取值同样受到车车通信有效范围的约束。就目前而言,车间通信的可靠范围为200~300 m,即在任意行驶速度下的车间有效通信范围约为4辆车之间[6]。因此,本文以m最大取值为3的CCC系统作为研究对象。

图1 联网巡航控制系统
Fig. 1 Connected cruise control system
1.2 跟驰模型
选取手动车辆跟驰模型,并考虑CCC车辆的多前车信息反馈跟驰特性,建立相应的CCC跟驰模型。对于手动车辆而言,研究者们提出了多种跟驰模型[8]。依据文献[9],本文选取经典Helly类跟驰模型作为手动车辆跟驰模型,模型表达式为
 (1)
(1)
式中: 为车辆n在反应延时
为车辆n在反应延时 之后的输出加速度;
之后的输出加速度; 为车辆n与其前车n-1的速度差;
为车辆n与其前车n-1的速度差; 为车辆n与前车n-1之间的车头间距;
为车辆n与前车n-1之间的车头间距; 为车辆n在t时刻的速度;c1和c2为敏感系数;d为拥堵车头间距;r为安全车头时距。文献[9]中应用车辆轨迹数据(包括车辆速度、加速度、位移随时间的变化)对该模型中的参数进行标定,结果如下:τ1=1.258 8 s,c1=12.866 6 m/s,c2=0.142 0 s-2,d=8.795 1 m,r=2.453 9 s,这些轨迹数据通过间隔为0.1 s的视频拍摄方式采集于荷兰高速公路,标定中共使用109条轨迹数据,且每条数据的时间长度均大于20 s。
为车辆n在t时刻的速度;c1和c2为敏感系数;d为拥堵车头间距;r为安全车头时距。文献[9]中应用车辆轨迹数据(包括车辆速度、加速度、位移随时间的变化)对该模型中的参数进行标定,结果如下:τ1=1.258 8 s,c1=12.866 6 m/s,c2=0.142 0 s-2,d=8.795 1 m,r=2.453 9 s,这些轨迹数据通过间隔为0.1 s的视频拍摄方式采集于荷兰高速公路,标定中共使用109条轨迹数据,且每条数据的时间长度均大于20 s。
对于CCC跟驰模型而言,多前车反馈信息存在多样性。依据文献[10]可知,CCC真车实验中以前车电子阀门角度作为反馈信息,因此,本文应用该反馈建立CCC跟驰模型:

 (2)
(2)
式中:τ2为车车通信延时,文献[11]中车车通信在4辆车之间的延时为400 ms,因此τ2取0.4 s;ki为CCC车辆第i辆车的反馈系数; 为车辆n在t时刻的电子阀门角度,
为车辆n在t时刻的电子阀门角度, 为车辆n的前i辆车在t时刻的电子阀门角度,二者与车辆速度与加速度的数学模型如下[12]:
为车辆n的前i辆车在t时刻的电子阀门角度,二者与车辆速度与加速度的数学模型如下[12]:
 (3)
(3)
式中: 为车辆n在t时刻的加速度;
为车辆n在t时刻的加速度; 为车辆n的i前车在t时刻的加速度;为车辆n在t时刻的速度;
为车辆n的i前车在t时刻的加速度;为车辆n在t时刻的速度; 为车辆n的i前车在t时刻的速度;α和β为敏感系数,其取值分别为0.80与0.27[12]。
为车辆n的i前车在t时刻的速度;α和β为敏感系数,其取值分别为0.80与0.27[12]。
2 系统稳定性
稳定性分析是CCC系统的基本属性,也是理论分析CCC车辆多前车反馈系数的必要手段[7]。下面应用CCC车辆和手动车辆跟驰模型,对CCC系统在前车反馈数量m分别取1,2与3时的稳定性进行分析。
分别定义车辆速度扰动及车头间距扰动表达式如下:
 (4)
(4)
式中: 为车辆n在t时刻的速度扰动;
为车辆n在t时刻的速度扰动; 为车辆n在t时刻的车头间距扰动;
为车辆n在t时刻的车头间距扰动; 为车辆n在t时刻的车头间距;v和h分别表示平衡态速度与平衡态车头间距。
为车辆n在t时刻的车头间距;v和h分别表示平衡态速度与平衡态车头间距。
在交通流平衡态,应用泰勒公式对手动车辆跟驰模型(见式(1))进行线性化处理,得到如下关系式:
 (5)
(5)
将式(4)代入式(5)得到关于扰动项的偏微分方程:
 (6)
(6)
式中: 为车辆n与其前车n-1在t时刻的速度扰动差。应用经典控制理论[13],对式(6)进行拉普拉斯变换,计算得到扰动由前车传递至手动车辆时的传递函数G1(s):
为车辆n与其前车n-1在t时刻的速度扰动差。应用经典控制理论[13],对式(6)进行拉普拉斯变换,计算得到扰动由前车传递至手动车辆时的传递函数G1(s):
 (7)
(7)
式中:s为拉普拉斯算子。
针对CCC车辆跟驰模型(见式(2))中的多前车反馈项,将式(4)代入式(3)中计算得到该多前车反馈项对应的扰动微分方程:

 (8)
(8)
结合式(6),将式(8)代入式(2)得到CCC车辆跟驰模型关于扰动项的微分方程:
 (9)
(9)
对式(9)进行拉普拉斯变换得到扰动由前车传递至CCC车辆时的传递函数G2(s):


 (10)
(10)
以图1所示的CCC系统为研究对象,其前方扰动作为系统输入,尾车CCC车辆对扰动的输出作为系统输出,则该控制系统的传递函数G(s)为
 (11)
(11)
令s=jw(其中jw为频率域,j为虚数单位;w为频率,w≥0),将式(11)的拉普拉斯域转化为频率域,当传递函数G(s)幅频特性的幅值小于1时,该CCC系统稳定,即
 <1 (12)
<1 (12)
式中: 为传递函数幅频特性幅值。
为传递函数幅频特性幅值。
由式(7),(10)和(12)可以看出:CCC系统稳定性由平衡态速度v以及CCC车辆的多前车反馈系数ki决定。本文CCC车辆多前车反馈数量m最大取值为3,当m分别取值1,2和3时,将跟驰模型参数以及式(7)与(10)代入式(12)中,可计算得到各平衡态速度取值以及各反馈系数取值下的稳定性,即得到CCC系统关于平衡态速度与前车反馈系数的稳定域。为了简化CCC系统控制的复杂性,本文假设CCC系统反馈系数取值相同,由此计算得到的系统稳定域见图2,其中A区域为稳定区域,B区域为不稳定区域。由图2可以看出:随着多前车反馈数量m增大,反馈系数取值对CCC系统稳定时平衡态速度范围的敏感性降低。由文献[7]可知CCC系统应当尽可能地具备较大的稳定速度范围,依据图2中的稳定域结果可得反馈系数分别如下:m=1时,反馈系数k1=0.25;m=2时,反馈系数k1=k2=0.35;m=3时,反馈系数k1=k2=k3=0.45。
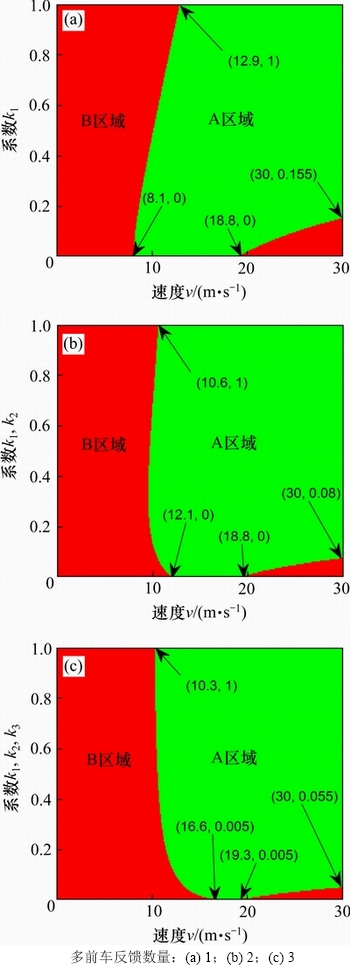
图2 CCC系统稳定域
Fig. 2 Stability region of CCC system
3 CCC系统对交通流油耗影响的仿真分析
3.1 评价指标
基于跟驰模型数值仿真实验,应用交通流油耗评价指标分析CCC系统的影响是常见的研究手段。本文选取的交通流油耗评价指标如下[14]:




 (13)
(13)
式中:Fn,t为车辆n在时刻t产生的油耗;f1~f16为系数,取值分别如下[14]:f1=-0.679 440,f2=0.135 273,f3= 0.015 946,f4=-0.001 190,f5=0.029 665,f6=-0.000 28,f7=1.49×10-6,f8=0.004 808,f9=-2.1×10-5,f10=5.54× 10-8,f11=8.33×10-5,f12=9.37×10-7,f13=-2.5×10-8,f14=-6.1×10-5,f15=3.04×10-7,f16=-4.5×10-9。
由于本文主要探究CCC系统相对于传统手动车辆对交通流油耗的影响,因此可将式(13)中评价指标参数的取值应用到本文仿真实验中[15-18],依据式(13)统计得到所有车辆在全部时间内的油耗累积值,以此作为仿真实验中交通流油耗的仿真值。
3.2 仿真结果分析
基于车辆跟驰模型,对上匝道瓶颈进行交通流油耗影响的数值仿真实验。参考文献[19]选取仿真路段,即假设仿真路段中的主路和匝道均为单车道道路,仿真路段全长为6.5 km,上匝道位于整个路段的中间位置。上游车辆的初始驶入速度在25~30 m/s范围内随机确定,并选择3组交通需求情况进行仿真:主路需求为1 800 辆/h且匝道需求为400辆/h(记为需求Ⅰ);主路需求为1 500辆/h且匝道需求为 300辆/h (记为需求Ⅱ);主路需求为1 200辆/h且匝道需求为200辆/h (记为需求Ⅲ)。CCC车辆按照本文第2节中给出的反馈系数取值,并考虑交通流中车辆空间分布的随机性,按照图1所示的控制结构随机地接收前方1辆车、2辆车或3辆车的行驶信息反馈。针对连续CCC车辆的情况,后车CCC车辆可接收前方3辆车的反馈信息。鉴于2种车型在车辆混合行驶中的随机性,各CCC车辆比例下均独立进行3次仿真实验,并取交通流油耗仿真均值作为该情况下的油耗仿真结果。以CCC车辆比例为0时的手动车辆交通流油耗仿真结果为基准,计算得到不同CCC车辆比例下交通流油耗相对于手动车辆的交通流油耗降低率,结果如图3所示。

图3 交通流油耗降低率随CCC车辆比例的变化
Fig. 3 Change of fuel consumption reduction rate with CCC vehicle proportions
由图3可以看出:当CCC车辆比例小于50%时,交通流油耗降低率小于15%;当CCC车辆比例达到60%时,交通流油耗的降低速度变快。同时,为了进一步分析车联网环境下的交通流油耗情况,本文对CCC车辆比例为10%时的仿真结果进行进一步统计,计算可知在3组交通需求下,每辆CCC车辆的平均实际油耗相比于手动车辆分别降低23.43%,20.14%和20.58%,这表明车联网环境有利于降低交通流油耗。
此外,有研究表明交通稳定性可能影响交通运营质量[4, 20]。由本文第2节中所得CCC系统稳定域可知:CCC系统在车速大于10 m/s时处于稳定状态,在车速小于10 m/s时不稳定。为了进一步探究CCC系统稳定域与交通流油耗降低的内在关联性,将上述仿真实验中车辆初始驶入速度设为5~10 m/s。鉴于初始速度较低,在仿真实验中仅考虑交通需求Ⅲ情况下的仿真实验,仿真结果见表1。由表1可以看出:CCC车辆比例增加对交通流油耗降低的影响并不明显,相比于手动车辆交通流,CCC车辆交通流油耗仅降低3.59%。这一结果验证了CCC系统稳定域对交通流油耗降低的影响,这一结论与文献[4]和文献[20]中的结论相一致。
表1 交通需求Ⅲ下CCC车辆比例对交通流油耗的影响
Table 1 Impact of CCC vehicle proportions on traffic flow fuel consumption under traffic demand Ⅲ

4 结论
1) CCC系统稳定域影响交通流油耗降低率,当CCC系统稳定时,CCC车辆有利于交通流油耗的降低,相比手动车辆交通流,CCC车辆交通流可使油耗降低35%以上;而当CCC车辆比例小于50%时,交通流油耗降低速度缓慢,降低比例小于15%,当CCC车辆比例达到60%时,交通流油耗降低速度变得较快;当CCC系统不稳定时,CCC车辆对交通流油耗降低的影响不明显,油耗降低率小于3.59%。
2) 针对由CCC车辆与手动车辆构成的CCC系统的稳定域分析方法以及交通流油耗影响的仿真实验设计能够适应不同CCC车辆与手动车辆跟驰模型的选取,可为未来大规模CCC车辆背景下的交通流油耗管理与控制提供参考。
参考文献:
[1] MAHMASSANI H S. 50th anniversary invited article― autonomous vehicles and connected vehicle systems: flow and operations considerations[J]. Transportation Science, 2016, 50(4): 1140-1162.
[2] 秦严严, 王昊, 王炜, 等. 自适应巡航控制车辆跟驰模型综述[J]. 交通运输工程学报, 2017, 17(3): 121-130.
QIN Yanyan, WANG Hao, WANG Wei, et al. Review of car-following models of adaptive cruise control[J]. Journal of Traffic and Transportation Engineering, 2017, 17(3): 121-130.
[3] 秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的异质交通流基本图模型[J]. 中国公路学报, 2017, 30(10): 127-136.
QIN Yanyan, WANG Hao, WANG Wei, et al. Fundamental diagram model of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127-136.
[4] 秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的混合交通流驾驶舒适性[J]. 哈尔滨工业大学学报, 2017, 49(9): 103-108, 173.
QIN Yanyan, WANG Hao, WANG Wei, et al. Driving comfort of traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. Journal of Harbin Institute of Technology, 2017, 49(9): 103-108, 173.
[5] ZHOU Mofan, QU Xiaobo, JIN Sheng. On the impact of cooperative autonomous vehicles in improving freeway merging: a modified intelligent driver model-based approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(6): 1422-1428.
[6] GE Jin, OROSZ G. Dynamics of connected vehicle systems with delayed acceleration feedback[J]. Transportation Research Part C: Emerging Technologies, 2014, 46: 46-64.
[7] QIN Yanyan, WANG Hao. Analytical framework of string stability of connected and autonomous platoons with electronic throttle angle feedback[J]. Transportmetrica A: Transport Science, 2018, DOI: 10.1080/23249935.2018.1518964.
[8] 王殿海, 金盛. 车辆跟驰行为建模的回顾与展望[J]. 中国公路学报, 2012, 25(1): 115-127.
WANG Dianhai, JIN Sheng. Review and outlook of modeling of car following behavior[J]. China Journal of Highway and Transport, 2012, 25(1): 115-127.
[9] WANG Hao, WANG Wei, CHEN Jun, et al. Using trajectory data to analyze intradriver heterogeneity in car-following[J]. Transportation Research Record: Journal of the Transportation Research Board, 2010(2188): 85-95.
[10] LI Kun, IOANNOU P. Modeling of traffic flow of automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2004, 5(2): 99-113.
[11] SHLADOVER S E, NOWAKOWSKI C, LU Xiaoyun, et al. Cooperative adaptive cruise control: definitions and operating concepts[J]. Transportation Research Record: Journal of the Transportation Research Board, 2015(2489): 145-152.
[12] LI Yongfu, ZHANG Li, PEETA S, et al. A car-following model considering the effect of electronic throttle opening angle under connected environment[J]. Nonlinear Dynamics, 2016, 85(4): 2115-2125.
[13] QIN Yanyan, WANG Hao, RAN Bin. Stability analysis of connected and automated vehicles to reduce fuel consumption and emissions[J]. Journal of Transportation Engineering, Part A: Systems, 2018, 144(11): 04018068-1-9.
[14] WU Changxu, ZHAO Guozhen, OU Bo. A fuel economy optimization system with applications in vehicles with human drivers and autonomous vehicles[J]. Transportation Research Part D: Transport and Environment, 2011, 16(7): 515-524.
[15] TANG Tieqiao, HUANG Haijun, SHANG Huayan. Influences of the driver’s bounded rationality on micro driving behavior, fuel consumption and emissions[J]. Transportation Research Part D: Transport and Environment, 2015, 41: 423-432.
[16] TANG Tieqiao, LUO Xiaofeng, LIU Kai. Impacts of the driver’s bounded rationality on the traffic running cost under the car-following model[J]. Physica A: Statistical Mechanics and its Applications, 2016, 457: 316-321.
[17] LI Xiaopeng, CUI Jianxun, AN Shi, et al. Stop-and-go traffic analysis: theoretical properties, environmental impacts and oscillation mitigation[J]. Transportation Research Part B: Methodological, 2014, 70: 319-339.
[18] LEE J, PARK B. Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 81-90.
[19] TALEBPOUR A, MAHMASSANI H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput[J]. Transportation Research Part C: Emerging Technologies, 2016, 71: 143-163.
[20] PUEOOBPAPHAN R, VAN AREM B. Driver and vehicle characteristics and platoon and traffic flow stability: Understanding the relationship for design and assessment of cooperative adaptive cruise control[J]. Transportation Research Record: Journal of the Transportation Research Board, 2010( 2189): 89-97.
(编辑 伍锦花)
收稿日期:2018-01-12;修回日期:2018-03-05
基金项目(Foundation item):国家自然科学基金资助项目(51478113,51878161);国家重点研发计划资助项目(2016YFB0100906);交通运输部科学技术研究计划项目(2015364X16030);江苏省研究生科研与实践创新计划项目(KYCX17_0146) (Projects(51478113, 51878161) supported by the National Natural Science Foundation of China; Project(2016YFB0100906) supported by the National Key R&D Program of China; Project(2015364X16030) supported by the Information Technology Research Program of Ministry of Transport of China; Project(KYCX17_0146) supported by the Postgraduate Research & Practice Innovation Program of Jiangsu Province)
通信作者:王昊,博士,教授,从事交通流理论研究;E-mail: haowang@seu.edu.cn

