“Ľ÷÷¬ńīÝĽķ∆ų»ňĽ¨“∆≤ő żĻņľ∆∑Ĺ∑®
÷žņŕ1£¨ĻýĹģ1£¨Ńűł’∑Ś2
(1. ÷–ĻķŅ∆—ß‘ļ ≥§īļĻ‚—ßĺę√‹Ľķ–Ķ”ŽőÔņŪ—–ĺŅňý£¨ľ™Ń÷ ≥§īļ£¨130033£Ľ
2. ĻĢ∂ŻĪűĻ§“Ķīů—ß Ľķ∆ų»ňľľ ű”ŽŌĶÕ≥Ļķľ“÷ōĶ„ Ķ—ť “£¨ļŕŃķĹ≠ ĻĢ∂ŻĪű£¨100081)
’™“™£ļ”…”ŕ¬ńīÝĽķ∆ų»ň‘ŕĶō√ś––◊ŖĶńĻż≥Ő÷–īś‘༨“∆Ō÷Ōů£¨ī”∂ÝĶľ÷¬őř∑®Ĺ®ŃĘ◊ľ»∑Ķń¬ńīÝĽķ∆ų»ňĶō√ś––◊Ŗń£–Õ°£Ľý”ŕīň£¨ŐŠ≥Ų“Ľ÷÷¬ńīÝĽ¨“∆≤ő żĻņľ∆∑Ĺ∑®”√”ŕÕÍ…∆¬ńīÝĽķ∆ų»ňĹ®ń£°£ ◊Ō»∂‘¬ńīÝĽķ∆ų»ň”ŽĶō√ś◊ų”√∂ĮѶ—ßń£–ÕĹÝ––∑÷őŲ£¨‘ŕīňĽýī°…ŌĹÝ––∆Ĺ√ś‘ň∂Į—ßĹ®ń££¨»Ľļů“‘‘ň∂Į—ßń£–Õő™“ņĺ›…Ťľ∆“ĽłŲĺŖ”–ņÓ—«∆’ŇĶ∑Úő»∂®–‘ĶńĽ¨ń£ĻŘ≤‚∆ų”√”ŕ∂‘Ľ¨“∆≤ő żĶńĻņľ∆£¨≤Ę«“‘ň”√∑«÷ßŇš∑÷ņŗŃ£◊”»ļ”ŇĽĮň„∑®∂‘Ľ¨ń£ĻŘ≤‚∆ųĶń‘Ų“śĹÝ––”ŇĽĮ£¨ ĻĶ√Ļņľ∆ĹŠĻŻłŁľ”◊ľ»∑°£∑¬’ś Ķ—ťĹŠĻŻ÷§√ųŃňł√∑Ĺ∑®Ķń”––ß–‘£¨ő™Ō¬“Ľ≤ĹĶńĻžľ£Ņō÷∆īÚŌ¬Ľýī°°£
ĻōľŁī £ļ¬ńīÝĽķ∆ų»ň£ĽĽ¨“∆≤ő żĻņľ∆£ĽĽ¨ń£ĻŘ≤‚∆ų£Ľ∑«÷ßŇš∑÷ņŗŃ£◊”»ļ”ŇĽĮň„∑®
÷–Õľ∑÷ņŗļŇ£ļTP242 őńŌ◊ĪÍ÷嬎£ļA őń’¬ĪŗļŇ£ļ1672-7207(2013)08-3173-06
Slip estimation method of track robot
ZHU Lei1, GUO Jiang1, LIU Gangfeng2
(1. Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China;
2. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 100081, China)
Abstract: Due to the slip phenomenon, it is impossible to build the accurate model of track robot. Focusing on this problem, a slip parameters estimation method was provided to improve the track model. First, the track robot and terrain interaction dynamic model was analyzed, and the kinematic mode was also established. Then a Lyapunov stable sliding mode observer for slip parameters was designed based on the kinematic model. Moreover, the gain of the observer was optimized through the non-dominant sort particle swarm optimization (NSPSO) in order to acquire more precise results. Simulation experiment verifies that this method is effective and also prepares for the trajectory control later.
Key words: track robot; slip estimation; sliding mode observer£Ľnon-dominant sort particle swarm optimization (NSPSO)
¬ńīÝĽķ∆ų»ň”…”ŕĺŖ”–Ńľļ√ĶńĶō√ś ”¶ń‹Ń¶£¨“—ĺ≠‘ŕ‘÷ń—ň—ĺ»°Ę∑īŅ÷∑ņĪ©°Ę…Óļ£≤…ŅůĶ»Ńž”Ú”–Ńň‘Ĺņī‘Ĺ∂ŗĶń”¶”√[1-2]°£”…”ŕ¬ńīÝĽķ∆ų»ňīś‘༨“∆Ō÷ŌůĶľ÷¬Ńňń£–ÕĶń≤Ľ»∑∂®–‘ļ‹īů£¨ļ‹ń— ĶŌ÷ĺę»∑Ļžľ£łķ◊ŔŅō÷∆£¨ő™īň£¨–Ū∂ŗ—ß’Ŗ∂ľ∂‘¬ńīÝĽķ∆ų»ňń£–ÕĹÝ––Ńň…Ó»Ž—–ĺŅ°£ńŅ«į£¨∂‘¬ńīÝĽķ∆ų»ňĶń—–ĺŅ÷ų“™īś‘ŕ2÷÷ń£–Õ£ļ“Ľ÷÷ń£–Õ «Õ®ĻżľÚĽĮĹę¬ńīÝĽķ∆ų»ňĪšĽĽő™¬÷ ĹĽķ∆ų»ň£¨“Ľ÷÷ «Ľ¨“∆≤Ŕ◊›łňń£–Õ[3]°£ľÚĽĮń£–Õňš»ĽĪ„”ŕ”¶”√£¨Ķę «ļŲ¬‘Ńň≤ĽŅ…Ī‹√‚ĶńĽ¨“∆Ō÷Ōů”Ž Ķľ ń£–ÕŌŗĺŗ…ű‘∂°£Ľ¨“∆≤Ŕ◊›łňń£–Õ‘ÚÕ®Ļż∂‘¬ńīÝ”ŽĶō√ś÷ģľšŌŗĽ•◊ų”√£¨Ĺ®ŃĘ∂ĮѶ—ß∆Ĺļ‚∑Ĺ≥Ő”Ž Ķľ «ťŅŲ∑ŻļŌĹŌļ√[4]°£Ķę «”…”༨“∆≤ő ż «łŲ ĪĪšĶńŃŅ£¨“Úīň∂ĮѶ—ß∆Ĺļ‚∑Ĺ≥Ő÷–Ķńőī÷™ŃŅĻż∂ŗĽĻ «őř∑®«ůĹ‚£¨ő™īň∆»«––Ť“™ń‹ĻĽĽŮĶ√Ľ¨“∆≤ő żĶń∑Ĺ∑®°£īęÕ≥Ķń∑Ĺ∑®ÕýÕý≤…”√÷ĪĹ”≤‚ŃŅ£¨Ķę «”…”ŕ…ŤĪłĶńįļĻů°Ę÷ ŃŅĶńŌř÷∆“‘ľįīęł–∆ų‘Ž…ýĶńł…»ŇĶ»£¨ÕýÕýőř∑® ĶŌ÷£¨∂Ý«“Ķ√ĶĹĶń≤ő ż“≤≤Ľ◊ľ»∑Ķń[5]°£ő™īň“Ľ–©—ß’ŖŐŠ≥ŲŃňľšĹ”Ķń∑Ĺ∑®ľī¬ńīÝĽ¨“∆≤ő żĻņľ∆∑Ĺ∑®°£ņż»Á£¨DarĶ»[6]“‘irobotĻęňĺĶńPackbotĽķ∆ų»ňő™Ľýī°£¨ņŻ”√ņ©’ĻŅ®∂Ż¬Ł¬ň≤®∆ų(EKF)∂‘Ľķ∆ų»ňĶńĻžľ£°ĘļĹŌÚĹ«ļÕĽ¨“∆≤ő żĶ»ĹÝ––ŃňĻņľ∆£¨≤Ę‘ŕ“ĽłŲĶ»Ī»ňű∑ŇĶńń£–Õ÷–ĹÝ––Ńň—ť÷§°£÷‹≤®Ķ»[7]≤…”√Ľý”ŕ∑Ĺłýőř…ęŅ®∂Ż¬Ł¬ň≤®(SR-UKF)‘ŕŌŖ∑«ŌŖ–‘Ļņľ∆∑Ĺ∑®∂‘Ľķ∆ų»ňĶńőĽ◊ňļÕĽ¨∂Į≤ő żĹÝ––Ń™ļŌĻņľ∆£¨‘ŕīňĽýī°…ŌŐŠ≥ŲŃň“Ľ÷÷∂ĮŐ¨∑īņ°ŌŖ–‘ĽĮĶń»ęĺ÷÷ł ż ’Ń≤Ņō÷∆¬…“‘Ĺ‚ĺŲĽķ∆ų»ňĶńĻžľ£łķ◊ŔŅō÷∆ő Ő‚°£”…”ŕ…Ō Ų∑Ĺ∑®ĺý «Ľý”ŕŅ®∂Ż¬Ł¬ň≤®∆ų£¨“ÚīňĶĪń£–Õ∑«ŌŖ–‘∑«≥£łŖ°Ę∑«łŖňĻŐō–‘ŐōĪū«ŅĶń ĪļÚ£¨–‘ń‹ľĪĺÁŌ¬ĹĶ£¨…ű÷Ń∑Ę…Ę[8]°£Ľ¨ń£ĻŘ≤‚∆ų(SMO£¨sliding mode observer)◊Ó‘Á «”…—ß’ŖŐŠ≥Ų∂‘Ľ¨ń£Ņō÷∆∆ų≤Ľ»∑∂®–‘ĹÝ––ĻŘ≤‚Ķńľľ ű£¨”…”ŕ∆š◊‘…Ū”–ĹŌļ√Ķń ’Ń≤–‘÷ ¬≥įŰő»∂®–‘ļ‹łŖ£¨ńŅ«į“—ĺ≠Ļ„∑ļĶō”¶”√ĶĹŃň∂‘ŌĶÕ≥ ĪĪš≤ő żĶńĻņľ∆÷–[9]°£ő™īň£¨Īĺőń◊ų’ŖŐŠ≥Ų“Ľ÷÷Ľý”༨ń£ĻŘ≤‚∆ųĶń¬ńīÝĽķ∆ų»ňĶńĽ¨“∆≤ő żĻņľ∆∑Ĺ∑®£¨Ņľ¬«Ľ¨ń£ĻŘ≤‚∆ųĶń‘Ų“ś∂‘”ŕ≤ő żĻņľ∆Ķń”įŌž£¨≤…”√∂ŗńŅĪÍ∑÷ņŗŃ£◊”»ļ”ŇĽĮň„∑®∂‘‘Ų“śĹÝ––”ŇĽĮ£¨ŐŠłŖŃňň„∑®–߬ °£Õ®Ļż∑¬’ś Ķ—ťĹŠĻŻĪŪ√ųł√∑Ĺ∑®ń‹ĻĽĹŌő™◊ľ»∑ĶōĻņľ∆Ľ¨“∆≤ő ż£¨Ņ…“‘”¶”√ĶĹĻžľ£łķ◊Ŕ÷–£¨ ĶŌ÷Ľķ∆ų»ňĺę»∑Ņō÷∆°£
1 ¬ńīÝĽķ∆ų»ňĶō√ś◊ų”√ń£–Õ
Ļō”ŕ¬ńīÝ”ŽĶō√ś◊ų”√Ķń—–ĺŅ∆š≥ű÷‘ĺÕ «∑÷őŲ≥ĶŃĺļÕŐĻŅňĶń–– Ľ–‘ń‹£¨ňš»Ľ◊Ó‘ÁĶń—–ĺŅŅ™ ľ”ŕ20 ņľÕ30ńÍīķ£¨Ķę «“Ľ÷ĪĶĹ20 ņľÕ50ńÍīķ£¨ňś◊ŇĪīŅňĶń≥ĶŃĺĶō√śŃ¶—ß÷Ý◊ųĶń√ś ņ£¨∆šŐŠ≥ŲĶń—ĻѶ≥ŃŌ›ņŪ¬ŘĶ√ĶĹŃňīůľ“Ļ„∑ļĶń»ŌŅ…£¨ő™¬ńīÝĽķ∆ų»ň”ŽĶō√śĶń◊ų”√—–ĺŅīÚŌ¬ŃňĽýī°°£
ňśļů£¨LeĶ»[10]ņŻ”√ł√ņŪ¬ŘĹ®ŃĘŃň¬ńīÝĽķ∆ų»ň”ŽĶō√ś◊ų”√ĶńѶ—ßń£–Õ£¨»ÁÕľ1ňý ĺ°£ī”Õľ1Ņ…“‘Ņī≥Ų£ļ¬ńīÝĽķ∆ų»ň”ŽĶō√ś◊ų”√Ķń ĪļÚ£¨÷ų“™ «Õ®Ļż÷ų∂Į¬÷īÝ∂Į¬ńīÝī”∂Ý∂‘Ķō√ś ©ľ”Õ‚‘ōļ…£¨Ķō√ś÷ų“™Ĺę≤ķ…ķ∑®ŌŗѶľį«–ŌÚѶ°£∑®ŌÚņÔ÷ų“™”–2łŲ¬ńīÝĶń«£“żŃ¶FoļÕFi£¨“‘ľį2łŲ¬ńīÝ ‹ĶĹĶń«įĹÝ∑ĹŌÚĶń◊ŤŃ¶RxoļÕRxi°£«–ŌÚѶ‘Ú÷ų“™ «Ľķ∆ų»ň◊™ŌÚ ĪļÚňý≤ķ…ķĶń£¨įŁņ®ņŽ–ńѶFcent“‘ľį¬ńīÝńŕÕ‚≤ŗ ‹ĶĹĶńļŠŌÚń¶≤Ń◊ŤŃ¶Ry(īů–°”Ž¬ńīÝĶ•őĽ≥§∂»◊ŤŃ¶F1ļÕF2”–Ļō)°£
”…”ŕ…Ō ŲѶ”»∆š «ņŽ–ńѶĶń◊ų”√£¨ ĻĶ√◊™ÕšĶńň≤–ń≤Ľ‘Ŕ”ŽĶ•‘™Ķńľłļő÷––ń÷ōļŌ£¨“Ľį„∂ľőĽ”ŕľłļő÷––ńOĶń«į∑ĹO°š£¨ī”∂ÝĶľ÷¬≤ķ…ķĽ¨“∆Ĺ«¶Ń£¨”…”༨“∆Ĺ«Ķńīś‘ŕńŕÕ‚≤ŗ¬ńīÝĶńňŔ∂»“≤ĽŠīś‘༨“∆°£“Úīň£¨‘ŕ¬ńīÝĽķ∆ų»ňĶńń£–ÕĹ®ŃĘ÷–÷Ľ”–Ņľ¬«Ľ¨“∆≤Ňń‹Ķ√ĶĹ◊ľ»∑Ķńń£–Õ°£
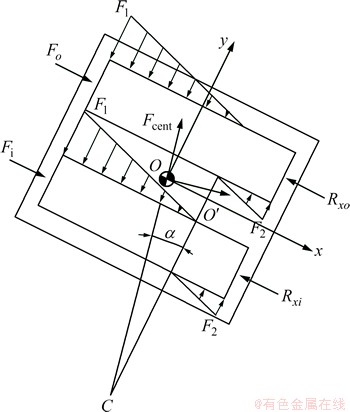
Õľ1 ¬ńīÝĽķ∆ų»ň”ŽĶō√ś◊ų”√ń£–Õ
Fig. 1 Track-terrain action model
2 ¬ńīÝĽķ∆ų»ň∆Ĺ√ś‘ň∂Įń£–Õ
łý囼ķ∆ų»ňĶńĹŠĻĻ–ő Ĺ£¨Ĺ®ŃĘŃňĽķ∆ų»ňĶń‘ň∂Į—ßń£–Õ»ÁÕľ2ňý ĺ°£
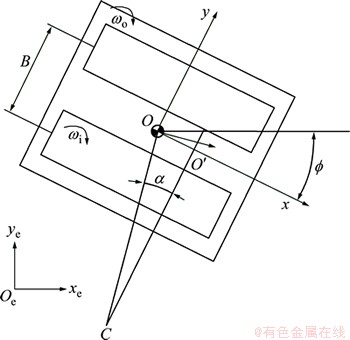
Õľ2 ¬ńīÝĽķ∆ų»ň‘ň∂Į—ßń£–Õ
Fig. 2 Track robot kinematics model
…ŤĽķ∆ų»ňĶń◊īŐ¨ŌÚŃŅő™[x y f]£¨’‚—ýŅ…“‘ļ‹»›“◊ĶōĶ√ĶĹĽķ∆ų»ň‘ŕ∆š◊‘…Ū◊ÝĪÍŌĶxoy÷–ňý¬ķ◊„Ķń‘ň∂Į—ß∑Ĺ≥Őő™
 (1)
(1)
Ĺ÷–£ļ¶ōoő™¬ńīÝ◊™Õš ĪÕ‚≤ŗ¬ńīÝĶń◊™∂ĮĹ«ňŔ∂»£¨rő™¬ńīÝ«ż∂Į¬÷įŽĺ∂£Ľ¶ōiő™¬ńīÝ◊™Õš Īńŕ≤ŗ¬ńīÝĶń◊™∂ĮĹ«ňŔ∂»£Ľioő™¬ńīÝ◊™Õš ĪÕ‚≤ŗ¬ńīÝĶńĽ¨“∆¬ £¨iiő™¬ńīÝ◊™Õš Īńŕ≤ŗ¬ńīÝĶńĽ¨“∆¬ £ĽBő™¬ńīÝ÷––ń÷ģľšĶńĺŗņŽ°£
Ĺę Ĺ(1)◊™ĽĮő™Ķō√ś»ęĺ÷◊ÝĪÍXeOeYe÷–Ņ…“‘Ķ√ĶĹ


 (2)
(2)
3 Ľ¨ń£ĻŘ≤‚∆ų…Ťľ∆
Õ®Ļż…Ō Ų—–ĺŅŅ…“‘Ņī≥Ų£ļő Ő‚ĶńĻōľŁ‘ŕ”ŕ»ÁļőÕ®ĻżĽķ∆ų»ň÷ –ńĶńňŔ∂»°Ę¬ńīݬ÷Ķń◊™∂ĮĹ«ňŔ∂»“‘ľįīęł–∆ųĶń≤‚ŃŅ żĺ›ņīĽŮĶ√Ōŗ”¶ĶńĽ¨“∆≤ő ż£¨ī”∂Ý”√”ŕĽķ∆ų»ňĶńŅō÷∆°£∑«ŌŖ–‘Ľ¨ń£ĻŘ≤‚∆ųń‹ĻĽ◊ľ»∑Ķō∂‘ŌĶÕ≥Ķń≤Ľ»∑∂®–‘ĹÝ––Ļņľ∆£¨“ÚīňŅ…“‘Õ®ĻżňŁņī ĶŌ÷∂‘Ľ¨“∆≤ő żĶńĻŘ≤‚£¨ ĻĶ√Ļžľ£ĻśĽģń£–ÕłŁľ”Ŕţ’ś Ķ«ťŅŲ°£”…”ŕŅ…“‘Õ®ĻżĽķ∆ų»ňĶńXŌÚőĽ“∆Ķ√ĶĹYŌÚőĽ“∆“Úīň÷Ľ–Ť∂‘XŌÚőĽ“∆ĹÝ––ĻŘ≤‚ľīŅ…£¨∂Ý«“Ņ…“‘Õ®ĻżńŕÕ‚≤ŗ¬ńīÝĶńĽ¨“∆¬ ∑÷Īūľ∆ň„Ľ¨“∆Ĺ«£¨’‚—ýĹ®ŃĘ»Á Ĺ(4)ňý ĺĶńĽ¨ń£ĻŘ≤‚∆ų


 (3)
(3)
Ĺ÷–£ļKiő™Ľ¨ń£‘Ų“śŌĶ ż£¨ĺýő™īů”ŕ0Ķń’ż ż°£
’‚—ýŅ…“‘Ĺ®ŃĘőů≤ÓőĘ∑÷∑Ĺ≥Őő™£ļ


 (4)
(4)
»ÁĻŻļŌņŪĶń—°‘Ů‘Ų“śŌĶ żĺÕŅ…“‘ ĻĶ√…Ō Ųőů≤Ó∑Ĺ≥Ő‘ŕ”–ŌřĶń Īľšńŕ ’Ń≤ĶĹ0£¨’‚—ýŅ…“‘Ķ√ĶĹ“ņĺ›őů≤ÓĶńĽ¨“∆≤ő żĻņľ∆∑Ĺ≥Őő™£ļ


 (5)
(5)
Ĺ÷–£ļ[]LPĪŪ ĺĶÕÕ®¬ň≤®∆ų°£
Ľ¨ń£ĻŘ≤‚∆ųĶńő»∂®–‘Ņ…“‘Õ®ĻżņÓ—«∆’ŇĶ∑Ú∑Ĺ≥ŐĹÝ––÷§√ų£¨ő™īňĹ®ŃĘņÓ—«∆’ŇĶ∑Ú∑Ĺ≥Őő™ £¨∑÷Īū∂‘V1£¨V2ļÕV3ĹÝ––∑÷őŲ£ļ
£¨∑÷Īū∂‘V1£¨V2ļÕV3ĹÝ––∑÷őŲ£ļ
∂‘”ŕV1«ůĶľ

 (6)
(6)
»Ű £¨‘Ú
£¨‘Ú £¨”÷
£¨”÷ £¨ňý“‘V1 «Ĺ•ĹÝő»∂®Ķń°£
£¨ňý“‘V1 «Ĺ•ĹÝő»∂®Ķń°£
∂‘”ŕV2«ůĶľ

 (7)
(7)
»Ű £¨‘Ú
£¨‘Ú £¨”÷
£¨”÷ £¨ňý“‘V2ĺÕ «Ĺ•ĹÝő»∂®Ķń°£
£¨ňý“‘V2ĺÕ «Ĺ•ĹÝő»∂®Ķń°£
∂‘”ŕV3«ůĶľ

 (8)
(8)
»Ű £¨‘Ú
£¨‘Ú £¨”÷
£¨”÷ £¨V3ĺÕ «Ĺ•ĹÝő»∂®Ķń°£◊Ř…Ō£¨ļŌņŪ—°‘ŮK1£¨K3ļÕK5ĺÕń‹ ĻĶ√…Ťľ∆ĶńĽ¨ń£ĻŘ≤‚∆ų «Ĺ•ĹÝő»∂®Ķń£¨ ĶŌ÷∂‘”ŕĽķ∆ų»ňĶńĻžľ£Ņō÷∆°£
£¨V3ĺÕ «Ĺ•ĹÝő»∂®Ķń°£◊Ř…Ō£¨ļŌņŪ—°‘ŮK1£¨K3ļÕK5ĺÕń‹ ĻĶ√…Ťľ∆ĶńĽ¨ń£ĻŘ≤‚∆ų «Ĺ•ĹÝő»∂®Ķń£¨ ĶŌ÷∂‘”ŕĽķ∆ų»ňĶńĻžľ£Ņō÷∆°£
4 Ľý”ŕ∂ŗńŅĪ͔ҼĮ∑Ĺ∑®ĶńĽ¨ń£ĻŘ≤‚∆ų‘Ų“ś”ŇĽĮ
‘Ų“ś≤ő żĶńīů–°≤ĽĶꔎ ’Ń≤ňŔ∂»”–ļ‹īůĻōŌĶ£¨∂Ý«“ĽĻĽŠ”įŌž ’Ń≤Ķńĺę∂»°£“Úīň£¨“Ľį„Ķń…Ťľ∆÷–ÕýÕý∂ľ «—°‘ŮīůĶń‘Ų“ś≤ő ż Ļőů≤Óļ‹Ņž ’Ń≤ĶĹĽ¨“∆√ś…Ō£¨»Ľļů≤…”√–°Ķń‘Ų“ś≤ő żĪ‹√‚ĻżīůĶń∂∂∂Į ĻĶ√őů≤Ó∆ęņŽĽ¨“∆√ś°£“Úīň£¨Ņ…“‘ņŻ”√“Ľ÷÷”ŇĽĮň„∑®∂‘‘Ų“śĹÝ–– Ī ĪĶų’Ż£¨ī”∂ÝŐŠłŖ ’Ń≤ňŔ∂»£¨≤ĘĽļĹ‚Ī£≥÷ĹŌ–°ŌĶÕ≥őů≤Ó”Ž∆ĹĽ¨∂∂’Ů÷ģľšĶń√¨∂‹[11]°£
Ĺ®ŃĘ√Ņ“Ľ≤…—ý ĪŅŐĶńőů≤Ó»ÁŌ¬ Ĺňý ĺ£ļ

i=1£¨2£¨°≠£¨n (9)
’‚—ýŅ…“‘”√√Ņ“Ľ ĪŅŐĶńőů≤Ó◊ųő™”ŇĽĮļĮ ż£¨¬ķ◊„√Ņ“Ľ ĪŅŐĶńőů≤Ó◊Ó–°ľīŅ…°£Ķę «ňś◊Ň ĪľšĶńÕ∆“∆£¨ńŅĪÍļĮ ż÷–e(Ti)ĶńłŲ ż“≤ «‘ŕ≤Ľ∂Ō‘Ųľ”°£ő™īň£¨īęÕ≥ĶńĽý”ŕĶ•ńŅĪÍĶńłų÷÷”ŇĽĮň„∑®“—ĺ≠őř∑®¬ķ◊„“™«ů£¨–Ť“™“Ľ÷÷Ľý”ŕ∂ŗńŅĪÍĶń”ŇĽĮ∑Ĺ∑®°£“Úő™łųłŲńŅĪÍ÷ģľšīś‘ŕĶń‘ľ ÝļÕŮÓļŌ◊ų”√£¨∂ŗńŅĪ͔ҼĮ∑Ĺ∑®ĶńĹ‚≤ĽŌŮĶ•ńŅĪ͔ҼĮīś‘ŕ“ĽłŲ◊Ó”ŇĹ‚£¨∂Ý «“ĽłŲ¬ķ◊„Pareto◊Ó”ŇĶń“Ľ◊ťĹ‚[12]°£’‚—ý∂ŗńŅĪÍĶń”ŇĽĮň„∑®ĺÕ «∂‘÷÷»ļ÷–ĶńŃ£◊”ĹÝ––Pareto◊Ó”ŇĶń«ůĹ‚ľīŅ…£¨“≤≤ķ…ķŃň–Ū∂ŗ÷÷∂‘”ŕ∂ŗńŅĪ͔ҼĮĶń“Ňīęň„∑®£¨ņż»Á∂ŗńŅĪÍ“Ňīęň„∑®(MOGA)[13]°Ę∑«÷ßŇš∑÷ņŗ“Ňīęň„∑®(NSGA)[14]°ĘŅžňŔ∑«÷ßŇš∑÷ņŗ“Ňīęň„∑®(NSGA-II)[15]°Ę–°…ķĺ≥Pareto“Ňīęň„∑®(NPGA)Ķ»[15]°£ĹŁńÍņī”–—ß’ŖŐŠ≥ŲŃň“Ľ÷÷Ľý”ŕ∑«÷ßŇš∑÷ņŗŃ£◊”»ļ∂ŗńŅĪ͔ҼĮ∑Ĺ∑®(NSPSO)£¨ł√∑Ĺ∑®∂‘ĽýĪĺĶńPSO∑Ĺ∑®ĹÝ––ŃňłńĹÝ£¨ī”∂Ý∂‘Ń£◊”Ķń◊‘…Ū◊Ó”Ň÷ĶļÕļůīķĹÝ––ŃňłŁő™ļŌņŪĶńņŻ”√£¨ī”∂Ý ĻĶ√∑«÷ßŇš∑÷ņŗĶńĪ»ĹŌłŁľ””––ߣ¨ŐŠłŖŃň–߬ [16]°£Ļ ĪĺőńĺÕŅ…“‘≤…”√Ľý”ŕ∑«÷ßŇš∑÷ņŗŃ£◊”»ļ”ŇĽĮň„∑®∂‘‘Ų“ś≤ő żĹÝ––«ůĹ‚£¨“‘∆ŕŐŠłŖ∂‘”༨“∆Ļņľ∆Ķń’ż»∑–‘°£”…”ŕPareto◊Ó”ŇĹ‚ľĮ «‘ŕ∑«÷ßŇšľĮ÷–≤ķ…ķĶń£¨ő™īň£¨ ◊Ō»“™Ĺť…‹“Ľ–©Ļō”ŕ∑«÷ßŇšľĮĶńŌŗĻōĽýĪĺłŇńÓ[17]°£
∂®“Ś1 …ŤPő™“ĽłŲľĮļŌ£¨įŁļ¨”–nłŲłŲŐŚ£¨≤Ę«“∆š÷–√Ņ“ĽłŲłŲŐŚĺý”–młŲ Ű–‘£¨…Ť√Ņ“ĽłŲ Ű–‘∂ľĺŖ”–“ĽłŲ–‘ń‹ļĮ żfk()(k=1£¨2£¨°≠£¨m)£¨’‚—ýŅ…“‘∂‘P÷–łŲŐŚįī «∑ŮĺŖ”–÷ßŇšĻōŌĶĹÝ––∑÷ņŗ£ļ
Pareto÷ßŇšĻōŌĶ£ļ £¨»Ű
£¨»Ű £¨
£¨ £Ľ«“
£Ľ«“ £¨ ĻĶ√
£¨ ĻĶ√
 £¨‘Ú≥∆x÷ßŇšy£¨ĪŪ ĺő™
£¨‘Ú≥∆x÷ßŇšy£¨ĪŪ ĺő™ £¨∆š÷–
£¨∆š÷– ĪŪ ĺŃĹ’ŖĺŖ”–÷ßŇšĻōŌĶ(“≤Ņ…≥∆ő™yĪĽx÷ßŇšĶń)°£
ĪŪ ĺŃĹ’ŖĺŖ”–÷ßŇšĻōŌĶ(“≤Ņ…≥∆ő™yĪĽx÷ßŇšĶń)°£
≤ĽŌŗĻōĻōŌĶ£ļ£¨≤Ľīś‘ŕ ĻĶ√ £¨‘Úx”Žy÷ģľšĺÕ√Ľ”–÷ßŇšĻōŌĶ£¨‘Ú≥∆xļÕyĽ•≤ĽĻōŃ™°£
£¨‘Úx”Žy÷ģľšĺÕ√Ľ”–÷ßŇšĻōŌĶ£¨‘Ú≥∆xļÕyĽ•≤ĽĻōŃ™°£
∂®“Ś2  £¨»Ű
£¨»Ű £¨ ĻĶ√
£¨ ĻĶ√ £¨‘Ú≥∆xő™ľĮļŌPĶń“ĽłŲ∑«÷ßŇšłŲŐŚ°£”…ľĮļŌP÷–Ķń»ę≤Ņ∑«÷ßŇšłŲŐŚ◊ť≥…ĶńľĮļŌ£¨≥∆÷ģő™PĶń∑«÷ßŇšľĮ°£
£¨‘Ú≥∆xő™ľĮļŌPĶń“ĽłŲ∑«÷ßŇšłŲŐŚ°£”…ľĮļŌP÷–Ķń»ę≤Ņ∑«÷ßŇšłŲŐŚ◊ť≥…ĶńľĮļŌ£¨≥∆÷ģő™PĶń∑«÷ßŇšľĮ°£
∂®“Ś3 …ŤNds «PĶń∑«÷ßŇšľĮ£¨£¨»Űx «PĶń∑«÷ßŇšłŲŐŚ£¨Īō”– £¨‘Ú≥∆Nds «PĶń◊Óīů∑«÷ßŇšľĮ°£
£¨‘Ú≥∆Nds «PĶń◊Óīů∑«÷ßŇšľĮ°£
’‚—ýĺÕŅ…“‘“ņĺ›∑«÷ßŇšľĮĶńłŇńÓĹę÷÷»ļ÷–ĶńłŲŐŚĹÝ––∑÷ņŗ£¨»ĽļůÕ®ĻżŃ£◊”»ļĶńň„∑®∂‘∑÷÷ßŇšľĮĹÝ––—į”Ň£¨ī”∂Ý ĶŌ÷∂‘◊Ó”Ň≤ő żĶń«ůĹ‚°£
Ń£◊”»ļň„∑® «1995ńÍ”…KennedyļÕEberhart[18]ŐŠ≥ŲĶń£¨Õ®Ļżń£ń‚…ķőÔĹÁ÷–ńŮņŗ√Ŕ ≥ĶńĻż≥Őņī ĶŌ÷Ķń“Ľ÷÷”ŇĽĮň„∑®°£÷÷»ļĶń…ÁĽŠ––ő™ĺÕ « ĻĶ√÷÷»ļĶńŃ£◊”ń‹ĻĽŌÚ◊Ó”ŇĶńŃ£◊”Ķń∑ĹŌÚ“∆∂Į£¨∂‘”ŕ÷÷»ļ÷–ĶńĶŕiłŲŃ£◊”£¨ľŔ…Ť∆š‘ŕ‘ň∂Į÷–Ķń◊‘…ŪňýĶĹīÔĶń◊Óľ—őĽ÷√ő™Pi£¨∂Ý’ŻłŲŃ£◊”»ļĶń◊Óľ—‘ň∂ĮőĽ÷√ő™Pg£¨‘Ú∂‘”ŕ√Ņ“ĽłŲŃ£◊”Ņ…“‘Õ®Ļż»ÁŌ¬Ļę ĹĹÝ––ňŔ∂»”ŽőĽ÷√ĶńłŁ–¬£ļ

 (10)
(10)
Ĺ÷–£ļc1ļÕc2ő™—ßŌį“Ú◊”£Ľr1ļÕr2ő™0ļÕ1÷ģľšĶńňśĽķ ż£Ľwő™»®÷ō“Ú◊”°£
…ŤőĽ÷√ŌÚŃŅ £¨÷÷»ļłŲ żő™N£¨÷÷»ļīśīĘŃ–ĪŪő™PSOlist£¨’‚—ýĽý”ŕ∑«÷ßŇš∑÷ņŗĶńŃ£◊”»ļň„∑®Ķń‘Ų“ś”ŇĽĮň„∑®ĶńĺŖŐŚ≤Ĺ÷Ť»ÁŌ¬£ļ
£¨÷÷»ļłŲ żő™N£¨÷÷»ļīśīĘŃ–ĪŪő™PSOlist£¨’‚—ýĽý”ŕ∑«÷ßŇš∑÷ņŗĶńŃ£◊”»ļň„∑®Ķń‘Ų“ś”ŇĽĮň„∑®ĶńĺŖŐŚ≤Ĺ÷Ť»ÁŌ¬£ļ
Step 1£ļ≥ű ľĽĮ°£‘ŕĪšŃŅ∑∂őßńŕňśĽķĶō…ķ≥…ĶŕiłŲŃ£◊”ĶńĶĪ«įőĽ÷√XiļÕ∆šĶĪ«įĶńňŔ∂»Vi£¨≤Ę«“Ī£÷§Vi≤Ľ≥¨ĻżňŔ∂»ĪšŃŅĶńľę÷ĶVmax£¨≤Ę«“∆š‘ŕ≤ĽÕ¨∑ĹŌÚĶńłŇ¬ ő™0.5£¨łŲŐŚĶń◊Ó”ŇőĽ÷√Piő™Xi£¨≤Ę«“Ĺę∆šīśīĘĶĹPSOlist÷–°£ŃÓĶŁīķľ∆ ż∆ųt=0£Ľ
Step 2£ļ∂‘ľ∆ ż∆ųĹÝ––ľ”1≤Ŕ◊ų£¨t=t+1£Ľ
Step 3£ļľ∆ň„÷ßŇšĻōŌĶ£ļłýĺ›∂®“Ś1£¨2£¨3ļÕ ”¶∂»ļĮ ż(10)£¨»∑∂®÷÷»ļ÷–Ķń∑«÷ßŇšŃ£◊””Ž÷ßŇšŃ£◊”£¨≤ĘĹę∆š∑÷ĪūĪ£īś”ŕ∑«÷ßŇš∑÷ņŗľĮļŌA÷–ļÕ÷ßŇšľĮļŌB÷–£Ľ
Step 4£ļ∂‘”ŕ√Ņ“ĽłŲŃ£◊”ľ∆ň„∆š–°…ķĺ≥÷ĶĽÚ’Ŗ”Ķľ∑ĺŗņŽ÷Ķ£Ľ
Step 5£ļ“ņĺ›–°…ķĺ≥ĽÚ’Ŗ”Ķľ∑ĺŗņŽ÷Ķ∂‘∑«÷ßŇš∑÷ņŗľĮ÷–ĶńŃ£◊”ĹÝ––Ķų’Ż£Ľ
Step 6£ļ∂‘”ŕ÷÷»ļ÷–ĶńŃ£◊”i£¨ī”ľĮļŌAĶńĹŌ”ŇłŲŐŚ÷–(ņż»Á ”¶∂»◊ÓłŖĶń«į5%łŲŐŚ)ňśĽķ—°‘Ů“ĽłŲ»ęĺ÷◊Ó”ŇPg°£Ľý”ŕ∑Ĺ≥Ő(10)ľ∆ň„Ń£◊”Ķń–¬ňŔ∂»Vi£¨»ĽļůłŁ–¬Xi°£ĹęĶŕiłŲŃ£◊”ĶńPiļÕ–¬ĶńXiĪ£īśĶĹ“ĽłŲ‘› ĪĶń÷÷»ļ÷–£¨īś÷Ł”ŕľĮļŌC÷–£¨∆š÷–PiļÕXi «Ļ≤īśĶń£¨“Úīň÷÷»ļłŲ żő™2N°£»Űi Step 7£ļī”ľĮļŌC÷–»∑»Ōń«–©ń‹ĻĽ◊ųő™∑«÷ßҚłĶńŃ£◊”£¨≤ĘĹę’‚–©īśīĘĶĹ∑«÷ßŇš∑÷ņŗľĮA÷–°£‘ŕľĮļŌC÷–≥żŃň∑«÷ßŇšĶńŃ£◊”“‘Õ‚ĶńŃ£◊”∂ľĪĽīśīĘĶĹľĮļŌCrest÷–£Ľ
Step 8£ļ«ŚŅ’PSOlist£¨“‘Ī„”√”ŕŌ¬“ĽīőĶŁīķ°£
Step 9£ļňśĽķĶō—°‘Ů∑«÷ßŇš∑÷ņŗľĮ÷–ĶńŃ£◊”≤ĘĹęňŁ√«∑Ň»ŽPSOlist÷–£Ľ
Step 10£ļ»ŰPSOlist÷–ĶńŃ£◊”łŲ ż–°”ŕN
(a) ∂‘ľĮļŌB÷–ĶńŃ£◊”‘ŔĹÝ––÷ßŇšľ∆ň„£¨≤Ę“ņĺ›∑÷ŇšĻōŌĶ∑÷Īūīś÷Ł”ŕľĮļŌA”ŽľĮļŌB÷–°£
(b) ĹęA÷–Ń£◊”ľ”»ŽPSOlist÷–£¨»ŰPSOlistĶńłŲ ż“ņ»Ľ…Ŕ”ŕN‘Ú◊™ĶĹ(a)£Ľ
Step 11£ļ»Űt–°”ŕ◊ÓīůĶŁīķīő ż£¨‘Ú◊™ĽōStep 2£Ľ
Step 12£ļī”◊Ó÷’Ķń÷÷»ļ÷–Ķ√ĶĹ◊Ó”ŇĹ‚£¨ľī‘Ų“śŌĶ ż°£
’‚—ýÕ®Ļż…Ō ŲĶń∑Ĺ∑®ĺÕń‹ Ķ ĪĶō∂‘‘Ų“śŌĶ żĹÝ––Ķų’Ż£¨ī”∂Ý ĻĶ√ĻŘ≤‚∆ųĶńĻņľ∆őů≤Ó‘Ĺņī‘Ĺ–°°£
5 ∑¬’ś Ķ—ť
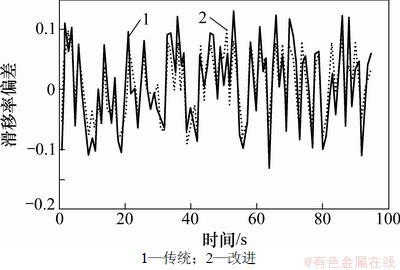
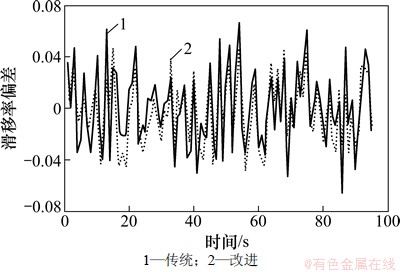
ő™—ť÷§∑Ĺ∑®ĶńŅ…–––‘”Ž”––ß–‘£¨‘ŕMatlab÷–ĹÝ––∑¬’ś Ķ—ť°£‘ŕ∑¬’ś Ķ—ť÷–£¨Ľķ∆ų»ň ◊Ō»“‘0.2 m/sĶńňŔ∂»÷ĪŌŖ––◊Ŗ“Ľ∂ő£¨»Ľļů“‘ļ„∂®ĶńĹ«ňŔ∂»¶ō=2 (°„)/s»∆įŽĺ∂ő™1 mĶńįŽ‘≤Ļžľ£––◊Ŗ£¨∆š––◊Ŗ¬∑ĺ∂»ÁÕľ3ňý ĺ°£∑÷Īū≤…”√ĪĺőńĶńłńĹÝSMO”ŽīęÕ≥SMO∂‘Ľķ∆ų»ňĶń◊ů”“¬ńīÝĽ¨“∆¬ “‘ľįĽ¨“∆Ĺ«ĹÝ––ŃňĻņľ∆£¨2÷÷∑Ĺ∑®Ķńőů≤ÓĪ»ĹŌĹŠĻŻ»ÁÕľ4~6ňý ĺ°£≤Ę∂‘2÷÷∑Ĺ∑®∂‘”¶Ķń∆Ĺĺýőů≤Ó”Ž‘ň–– ĪľšĹÝ––ŃňĪ»ĹŌ£¨»ÁĪŪ1ňý ĺ°£”…Õľ4~6ļÕĪŪ1Ņ…“‘Ņī≥Ų£ļņŻ”√ĪĺőńŐŠ≥ŲĶńĽý”ŕNPPSOłńĹÝĶńSMO∑Ĺ∑®Ļņľ∆ĶńĽ¨“∆≤ő ż”Ž’ś Ķ÷ĶłŁľ”Ŕţ£¨ĺ°Ļ‹ Īľš…‘¬żĶę «“ņ»Ľ¬ķ◊„Ľķ∆ų»ňĶń Ļ”√“™«ů£¨Ņ…“‘”√”ŕĻžľ£łķ◊Ŕ£¨ī”∂Ýő™Ľķ∆ų»ňĶńŅō÷∆ŐŠĻ©įÔ÷ķ°£
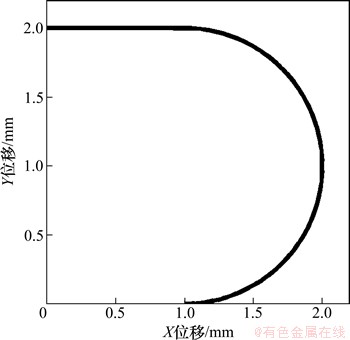
Õľ3 Ľķ∆ų»ň––◊Ŗ¬∑ĺ∂
Fig. 3 Trajectory of track robot
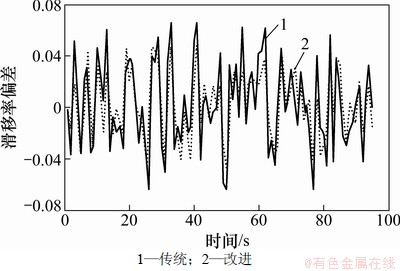
Õľ4 ◊ů¬ńīÝĽ¨“∆¬ Ļņľ∆őů≤ÓĪ»ĹŌ
Fig. 4 Comparisons of left slip estimation errors between traditional and modified method
Õľ5 ”“¬ńīÝĽ¨“∆¬ Ļņľ∆őů≤ÓĪ»ĹŌ
Fig. 5 Comparisons of right slip estimation errors between traditional and modified method
Õľ6 Ľ¨“∆Ĺ«Ļņľ∆őů≤ÓĪ»ĹŌ
Fig. 6 Comparisons of slip angle estimation error between traditional and modified method
ĪŪ1 2÷÷Ļņľ∆∑Ĺ∑®–‘ń‹Ī»ĹŌ
Table 1 Performance comparisons between traditional and modified method

6 ĹŠ¬Ř
(1) Ľý”ŕ¬ńīÝĽķ∆ų»ň∆Ĺ√ś‘ň∂Į—ßń£–Õ£¨ŐŠ≥ŲŃň“Ľ÷÷Ľ¨ń£ĻŘ≤‚∆ų”√”ŕ¬ńīÝĽķ∆ų»ňĽ¨“∆≤ő żĶńĻņľ∆£¨≤Ę÷§√ųŃň∆š¬≥įŰő»∂®–‘°£
(2) ņŻ”√∑«÷ßŇš∑÷ņŗŃ£◊”»ļ”ŇĽĮň„∑®∂‘Ľ¨ń£ĻŘ≤‚∆ų‘Ų“śĹÝ––”ŇĽĮ£¨ŐŠłŖŃňň„∑®–߬ °£
(3) Õ®ĻżMatlab∂‘Ī»∑¬’ś Ķ—ť£¨÷§√ųŃňłńĹÝ∑Ĺ∑®ĶńĻņľ∆őů≤Ó“™”Ň”ŕīęÕ≥∑Ĺ∑®ĶńĻņľ∆őů≤Ó£¨Ķę «”…”ŕ‘Ųľ”Ńňľ∆ň„ŃŅ£¨ľ∆ň„ Īľš¬‘”–‘Ųľ”£¨Ķę «»‘»Ľ¬ķ◊„ Ļ”√“™«ů°£
≤őŅľőńŌ◊£ļ
[1] Õűňś∆Ĺ, –‹Ļ‚Ľ‘. …Óļ£¬ńīÝĽķ∆ų≥ĶĶń Ķ ĪĶľļĹļÕĪ‹’Ō[J]. ÷–ńŌīů—ß—ßĪ®: ◊‘»ĽŅ∆—ßįś, 2007, 38(1): 128-132.
WANG Suiping, XIONG Guanghui. Real-time navigation and obstacle avoidance for deep seabed tracked vehicle[J]. Journal of Central South University: Science and Technology, 2007, 38(1): 128-132.
[2] ÷žņŕ, ∑ģľŐ◊≥, ’‘Ĺ‹, Ķ». Ľý”ŕ’§łŮ∑®ĶńŅůń—ň—ňųĽķ∆ų»ň»ęĺ÷¬∑ĺ∂ĻśĽģ”Žĺ÷≤ŅĪ‹’Ō[J]. ÷–ńŌīů—ß—ßĪ®: ◊‘»ĽŅ∆—ßįś, 2011, 42(11): 3421-3428.
ZHU Lei, FAN Jizhuang, ZHAO Jie, et al. Global path planning and local obstacle avoidance of searching robot in mine disasters based on the grid method[J]. Journal of Central South University: Science and Technology, 2011, 42(11): 3421-3428.
[3] ņÓ—“, —ÓŌÚ∂ę, ≥¬Ņ“. ¬ńīÝ Ĺ“∆∂ĮĽķ∆ų»ň∂ĮѶ—ßń£–Õľį∆š∑īņ°Ņō÷∆[J]. «ŚĽ™īů—ß—ßĪ®: ◊‘»ĽŅ∆—ßįś, 2006, 46(8): 1377-1380.
LI Yan, YANG Xiangdong, CHEN Ken. Dynamics model and feedback control of tracked robots[J]. Journal of Tsinghua University: Science & Technology, 2006, 46(8): 1377-1380.
[4] Wong J Y, Chiang C F. A general theory for skid steering of tracked vehicles on firm ground[C]//Garden C. Proceeding of the Institution of Mechanical Engineers, 2001: 343-355.
[5] ĻĘĺŁŌĢ, –ŌŃ’∑“, ’Ň÷ĺ‘∂. Ľý”ŕňŔ∂»ĻŘ≤‚∆ųĶń“∆∂ĮĽķ∆ų»ňĻžľ£łķ◊ŔŅō÷∆[J]. –ž÷›Ļ§≥Ő—ß‘ļ—ßĪ®: ◊‘»ĽŅ∆—ßįś, 2010, 25(3): 13-18.
GENG Junxiao, XING Linfen, ZHANG Zhiyuan. Research on trajectory tracking control of mobile robots based on velocity observer[J]. Journal of Xuzhou Institute of Technology: Natural and Science Edition, 2010, 25(3): 13-18.
[6] Dar T M, Longoria R G. Slip estimation for small-scale robotic tracked vehicles[C]//2010 American Control Conference Marriott Waterfront. Baltimore: IEEE, 2010: 6816-6821.
[7] ÷‹≤®, īųŌ»÷–, ļęĹ®īÔ. “įÕ‚Ľķ∆ų»ňĽ¨∂Į–ß”¶Ķń‘ŕŌŖĹ®ń£ļÕŅō÷∆[J]. Ľķ∆ų»ň, 2011, 33(3): 265-272.
ZHOU Bo, DAI Xianzhong, HAN Jianda. Online modeling and tracking control of mobile robots with slippage in outdoor environments[J]. Robot, 2011, 33(3): 265-272.
[8] ÷žņŕ, ∑ģľŐ◊≥, ’‘Ĺ‹, Ķ». “Ľ÷÷őī÷™Ľ∑ĺ≥Ō¬Ķń“∆∂ĮĽķ∆ų»ňSLAM∑Ĺ∑®[J]. Ľ™÷–Ņ∆ľľīů—ß—ßĪ®: ◊‘»ĽŅ∆—ßįś, 2011, 39(7): 9-13.
ZHU Lei, FAN Jizhuang, ZHAO Jie. SLAM method for mobile robot in unknown environment[J]. Journal of Huazhong University of Science and Technology: Nature Science Edition, 2011, 39(7): 9-13.
[9] ŃűĹūÁŻ, ňÔłĽīļ. Ľ¨ń£ĪšĹŠĻĻŅō÷∆ņŪ¬Řľį∆šň„∑®—–ĺŅ”ŽĹÝ’Ļ[J]. Ņō÷∆ņŪ¬Ř”Ž”¶”√, 2007, 24(3): 407-418.
LIU Jinkun, SUN Fuchun. Research and development on theory and algorithms of sliding mode control[J]. Control Theory & Applications, 2007, 24(3): 407-418.
[10] Le A T, Rye D C, Durrant-Whyte H F. Estimation of back-soil interactions for autonomous tracked vehicles[C]//Harrigan R. Proceedings of the 1997 IEEE International Conference on Robotics and Automation Albuquerque. New Mexico: IEEE, 1997, 2: 1388-1393.
[11] —Ó”¬, őńĶ§, ¬řį≤, Ķ». Ľý”ŕ∂ŗńŅĪ͔ҼĮĶńń£ļżĽ¨ń£ĪšĹŠĻĻŅō÷∆ľį”¶”√[J]. ÷–ńŌīů—ß—ßĪ®: ◊‘»ĽŅ∆—ßįś, 2006, 37(6): 1149-1154.
YANG Yong, WEN Dan, LUO An, et al. Fuzzy sliding mode variable structure control based on multi-objective optimization and its application[J]. Journal of Central South University: Science and Technology, 2006, 37(6): 1149-1154.
[12] őńÁÝ, Ńőőį÷ĺ, Ī’”¶÷ř. «ůĹ‚∂ŗńŅĪ͔ҼĮő Ő‚Ķń◊‘ ”¶Ń£◊”»ļň„∑®[J]. ľ∆ň„ĽķĻ§≥Ő”Ž”¶”√, 2010, 46(23): 38-40.
WEN Ying, LIAO Weizhi, BI Yingzhou. Self-adaptive particle swarm optimizer for multi-objective optimization problems[J]. Computer Engineering and Applications, 2010, 46(23): 38-40.
[13] Skinner B A, Parks G T, Palmer P R. Comparison of submarine drive topologies using multiobjective genetic algorithms[J]. IEEE Transactions on Vehicular Technology, 2009, 58(1): 57-68
[14] ¬ř §«’, ¬ŪŌŰŌŰ, ¬Ĺ“š. Ľý”ŕłńĹÝĶńNSGA “Ňīęň„∑®ĶńSOC »Ū”≤ľĢĽģ∑÷∑Ĺ∑®[J]. ĶÁ◊”—ßĪ®, 2009, 37(11): 2595-2599.
LUO Shengqin, MA Xiaoxiao, LU Yi. An advanced non-dominated sorting genetic algorithm based SOC hardware/software partitioning[J]. Acta Electronica Sinica, 2009, 37(11): 2595-2599.
[15] Heris S M K, Khaloozadeh H. Open- and closed-loop multiobjective optimal strategies for HIV therapy using NSGA-II[J]. IEEE Transactions on Biomedical Engineering, 2011, 58(6): 1678-1685.
[16] Li X D. A non-dominated sorting particle swarm optimizer for multiobjective optimization[C]//Erick C. Genetic and Evolutionary Computation Conference 2003. Chicago: Springer, 2003: 37-48.
[17] Coello C A C. A comprehensive survey of evolutionary-based multi-objective optimization techniques[J]. Knowledge and Information System, 1999, 1(3): 269-308.
[18] Kennedy J, Eberhart R C. Particle swarm optimization[C]// Attikouzel Y. Proceeding of IEEE International Conference on Neural Networks. Perth: IEEE, 1995: 1942-1948.
(Īŗľ≠ ≥¬įģĽ™)
’łŚ»’∆ŕ£ļ2012-09-20£Ľ–řĽō»’∆ŕ£ļ2012-12-06
ĽýĹūŌÓńŅ£ļĻķľ“łŖľľ ű—–ĺŅ∑Ę’Ļľ∆Ľģ(°į863°Īľ∆Ľģ)ŌÓńŅ(2007AA041501)
Õ®–Ň◊ų’Ŗ£ļ÷žņŕ(1982-)£¨ń–£¨ļŕŃķĹ≠ĻĢ∂ŻĪű»ň£¨≤© Ņ£¨ī” ¬ĽķĶÁŌĶÕ≥Ņō÷∆ň„∑®—–ĺŅ£ĽĶÁĽį£ļ15948786713£ĽE-mail£ļrayjew@sohu.com

