DOI: 10.11817/j.issn.1672-7207.2015.07.013
履带式移动机器人的转向特性
饶伟,王建中,施家栋
(北京理工大学 爆炸科学与技术国家重点实验室,北京, 100081)
摘要:为了描述履带式移动机器人的转向特性,考虑机器人履带的横向阻力为线性分布、履带与地面的接触压力为线性分布的情形,分别建立低速和高速转向时机器人的转向阻力矩模型,以表征机器人转向时所受的地面阻力矩。基于直线运动总功率与转向运动总功率之比来表明机器人转向的难易程度,分析机器人在大半径和小半径转向运动时的灵活性。采用转向功率校核电动机的额定承载能力,分析机器人的结构参数、转向半径与转向功率的关系。研究结果表明:机器人的转向半径越大,转向越灵活,外侧履带驱动轮转向功率越小;机器人滑移角越大,转向功率校核系数越大,外侧履带驱动轮功率越大;为机器人的结构参数优化和电动机的选择提供依据。
关键词:履带机器人;转向阻力矩;转向灵活性;转向功率
中图分类号:TP242 文献标志码:A 文章编号:1672-7207(2015)07-2474-07
Research on steering characteristics of tracked mobile robot
RAO Wei, WANG Jianzhong, SHI Jiadong
(State Key Laboratory of Explosion Science and Technology, Beijing Institute of Technology, Beijing 100081, China)
Abstract: In order to describe the steering characteristics of the tracked mobile robot, the linear distributions for lateral resistance of the robot’s track and contact pressure of the track and ground were considered. When the robot was steered at low speed and high speed, steering resistance moment model which indicated the ground resistance torque magnitude of robot steering was established separately. The difficulty of robot steering was expressed in terms of the ratio of total power of linear motion and steering movement. Flexibility of the robot was analyzed in a large radius and small radius steering movement. Rated load capacity of the motor was checked by the steering power. Relations structural parameters of the robot, turning radius and steering power were analyzed. Relations of structural parameters of the robot, turning radius and steering power were analyzed. The results show that the larger steering radius of the robot is, the more flexible the steering is, and the smaller steering power of the driving wheel of the outside track is. And the larger slip angle of the robot is, the greater the check coefficient of steering power is, and the greater steering power of the driving wheel of the outside track is. A theoretical basis is provided for the optimization of the robot’s structural parameters and the choice of motors.
Key words: tracked robot; steering resistance moment; turning flexibility; turning power
履带式移动机器人具有较强的地面适应能力,非常适合在复杂环境中行使。然而,在实际转向运动时,由于滑移和滑转的影响,履带与地面的连续接触压力、履带的横向阻力并非均匀分布,对机器人的转向阻力矩有很大影响[1-2];机器人低速和高速转向时,内外侧履带的转向功率不同,影响机器人的转向灵活性[3],因而有必要分析机器人的转向运动。A1-Milli等[4]考虑了机器人的整体重力均布在内外侧履带上,横向阻力的方向垂直于内外侧履带并且大小相等,得到转向阻力矩计算模型,但未考虑履带的横向阻力非均匀分布以及机器人重心位置变化带来的影响;Solis等[5]考虑了重心高度变化对阻力的影响和履带与地面接触压力非均匀分布对转向阻力矩的影响,未考虑转向阻力的非均匀分布。乔凤斌等[6]分析了机器人大半径转向时的转向灵活性,未考虑小半径低速和高速转向的灵活性。本文作者考虑履带与地面的连续接触压力和履带的横向阻力为非均匀分布、机器人重心位置变化对内外侧履带支撑力的影响、大半径和小半径转向对转向功率的影响,建立机器人的低速和高速转向阻力矩方程、高速转向动力学方程、直线运动功率和转向运动功率方程,以转向阻力矩、转向灵活性系数、转向功率校核系数等作为机器人转向特性的评价指标[7],分别从不同的方面研究机器人的转向性能。
1 机器人的转向描述
机器人的转向运动包括小半径转向、大半径转 向[7]。小半径转向时,外侧履带的速度方向与内侧履带的速度方向相反形成差速运动,实现机器人的转向;大半径转向时,内外侧履带的速度方向相同而大小不同实现转向。由于直线运动的纵向滚动阻力矩小于转向运动的横向阻力矩,因而在选择合适的驱动电机时,必须考虑机器人的转向特性[8-9]。
本文作者研制的履带移动机器人如图1所示。从图1可见:机器人2个后驱动轮采用滑移转向,然而在转向的过程中,面临滑移和滑转现象,使得机器人的转向阻力矩很大,当机器人的驱动力矩大于转向阻力矩时,才能实现转向运动。调整2个前摆臂的姿态,与机器人本体协调动作,实现复杂环境下的越障运动。

图1 履带移动机器人的结构图
Fig. 1 Structure of tracked mobile robot
2 机器人的转向特性
机器人在转向过程中,假设:
1) 机器人在均匀的平整硬质地面上行驶;
2) 空气阻力、驱动轮与履带之间的内阻力、电机输出轴至驱动轮之间传动机构的内阻力忽略不计;
3) 地面对单根履带的横向阻力线性分布;
4) 单根履带与地面的连续接触压力线性分布。
2.1 低速转向阻力矩分析
机器人在实际转向时,履带与地面连续接触的每一点实际受到的横向阻力并不相同,在地面未被破坏之前,越靠近转向瞬心,履带受力越小,履带接地段末端受力最大[10]。机器人低速转向受力分析如图2所示。忽略离心力的影响,内、外侧履带所受到的横向阻力为机器人在地面横向阻力系数作用下产生的阻力[11]。
图2中:xoy为机器人坐标系;o为机器人的质心;o′为机器人转向的瞬时中心;l为机器人本体内、外侧履带的长度;l1为前摆臂o2o3的长度;l2为机器人的履带与地面的接触长度;m1为机器人本体的质量;m2为2个前摆臂的质量;B为内外履带的中心距离;R为驱动轮的半径;r为摆臂小轮的半径;vc,vl和vr分别为机器人质心的速度、外履带的速度和内履带的速度; 为机器人的转向角速度。
为机器人的转向角速度。
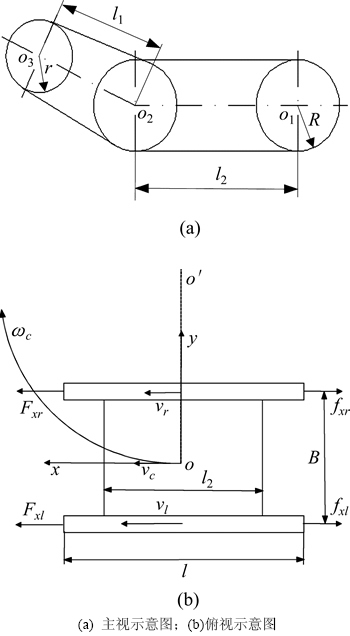
图2 机器人低速转向受力分析
Fig. 2 Force analysis of robot low-speed steering
由图2可得:
 (1)
(1)
式中:u1为横向阻力系数;Nzl为地面对外履带的支撑力;Nzr为地面对内履带的支撑力;fyr(x)为履带与地面接触时内履带上某一点受到的横向阻力;x为ox轴上的动点。
求解式(1)积分方程可得
 (2)
(2)
机器人低速转向时,内侧和外侧履带所受的横向阻力矩为
 (3)
(3)
2.2 高速转向阻力矩分析
机器人高速转向时,考虑离心力与滑移角的影响,高速转向示意图如图3所示。当机器人底盘上搭载不同的侦查或探测装置时,机器人重心的位置会发生变化,高速转向时内外侧履带在离心力横向分量的作用下,导致内外侧履带受到的地面支撑力不同[12-14]。可得到如下平衡方程:
 (4)
(4)
 (5)
(5)
式中: 为
为 线段与oy轴形成的滑移角;F1为高速转向的离心力;H为z方向上质心点与地面的距离;R1为机器人的转向半径。
线段与oy轴形成的滑移角;F1为高速转向的离心力;H为z方向上质心点与地面的距离;R1为机器人的转向半径。
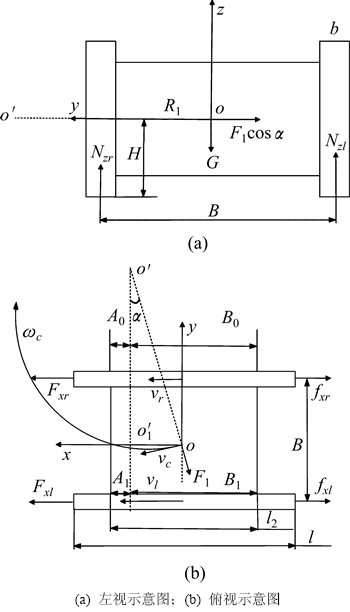
图3 机器人高速转向受力分析
Fig. 3 Force analysis of robot high-speed steering
假设瞬心 在履带中心面上的投影点
在履带中心面上的投影点 处的横向阻力为零且机器人匀速转向,根据机器人高速转向运动的受力分析,可得到如下平衡方程:
处的横向阻力为零且机器人匀速转向,根据机器人高速转向运动的受力分析,可得到如下平衡方程:

 (6)
(6)
式中:为线段与oy轴形成的滑移角;d为 的距离;A0为内侧履带前轮中心到的距离;B0为内侧履带后驱动轮中心到的距离;A1为外侧履带前轮中心到的距离;B1为外侧履带后驱动轮中心到的距离。
的距离;A0为内侧履带前轮中心到的距离;B0为内侧履带后驱动轮中心到的距离;A1为外侧履带前轮中心到的距离;B1为外侧履带后驱动轮中心到的距离。
 (7)
(7)
 (8)
(8)
由式(8)可得到内外履带的转向阻力矩:
 (9)
(9)
高速转向时的转向阻力矩为

 (10)
(10)
2.3 大半径转向灵活性分析
履带机器人转向时,转向的难易程度是衡量机器人转向性能的重要指标。本文作者用转向灵活性来描述机器人转向性能。
机器人的转向灵活性为直线运动所需要的功率与转向运动所需要的功率的比值[15-17]。当运动速度相同时,直线运动所需要的功率小于转向运动所需要的功率。如图3所示,建立机器人的转向动力学方程组:


 (11)
(11)
 (12)
(12)
式中:Fxr和Fxl分别为内和外侧履带的驱动力;fxr和fxl分别为地面对内和外侧履带的阻力; 为机器人在x方向运动的加速度;
为机器人在x方向运动的加速度; 为机器人在y方向运动的加速度;
为机器人在y方向运动的加速度; 为机器人的转向角加速度;Iz为机器人绕z轴旋转的转动惯量;M3为机器人绕o点旋转的力矩;M4为机器人低速或高速转向时的转向阻力矩。
为机器人的转向角加速度;Iz为机器人绕z轴旋转的转动惯量;M3为机器人绕o点旋转的力矩;M4为机器人低速或高速转向时的转向阻力矩。
 (13)
(13)
 (14)
(14)
式中:P1为外侧履带转向功率;P2为内侧履带转向功率;P3为机器人直线行驶驱动功率;u2为纵向滚动阻力系数。地面对内、外侧履带的阻力为
 (15)
(15)
机器人高速转向时的离心力为
 (16)
(16)
匀速转向时,高速大半径转向灵活性系数为
 (17)
(17)
式中: 。
。
低速大半径转向灵活性系数为
 (18)
(18)
2.4 小半径转向灵活性分析
当0≤R1<B/2时,机器人进行小半径转向运动,外侧履带的速度方向与内侧履带的速度方向相反形成差速运动,从而实现转向[18-19]。
高速小半径转向灵活性系数为

 (19)
(19)
低速小半径转向灵活性系数为
 (20)
(20)
2.5 转向功率校核系数
机器人转向运动时,外侧履带的驱动转速和转矩大于内侧履带的驱动转速和转矩,因而外侧履带的驱动功率大于内侧履带的驱动功率。当内侧履带的驱动功率远小于电动机的额定功率时,外侧履带的驱动功率可能远大于电动机的额定功率,这样可能造成外侧履带驱动电机损坏,因此,必须校核外侧履带的转向功率。采用外侧履带转向时的驱动功率与直线运动时的驱动功率之比来表示转向功率校核系数 [20]。
[20]。
高速转向时,转向功率校核系数为

 (21)
(21)
低速转向时,转向功率校核系数为
 (22)
(22)
3 转向特性仿真分析
机器人的转向特性与许多因素有关,主要影响因素包括:机器人本体的质量、2个摆臂的总质量、摆臂轮中心距、前后轮中心距、驱动轮半径、摆臂小轮半径、左右轮中心距。主要参数如表1所示。
3.1 低速和高速转向阻力矩分析
当横向阻力系数u1=0.3时,纵向滚动阻力系数u2=1.5 mm,vc=3 m/s,转向半径R1=100~200 mm,滑移角=10°~20°,低速转向阻力矩M1=9.03 N・m,高速转向阻力矩M22=4.51 N・m。
3.2 大半径转向灵活性分析
当横向阻力系数u1=0.3时,纵向滚动阻力系数u2=1.5 mm,vc=3 m/s,转向半径R1=170~250 mm,大半径转向与灵活性系数的关系曲线如图4所示。
表1 机器人的主要参数
Table 1 Main parameters of robot
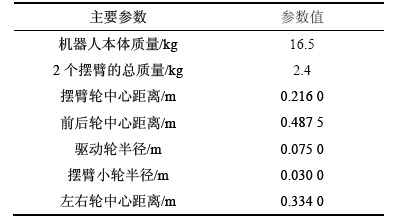
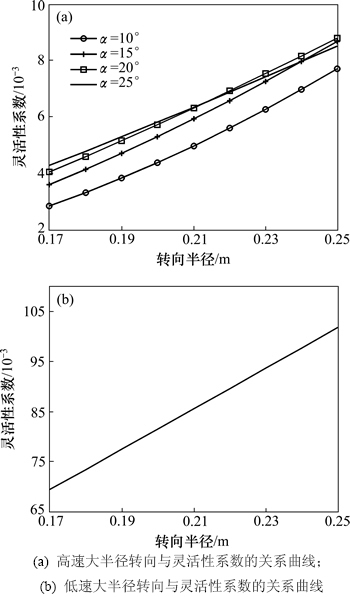
图4 大半径转向与灵活性系数的关系曲线
Fig. 4 Relationship between large turning radius and flexibility coefficient
由图4可知:大半径转向时,转向灵活系数k或k′随着转向半径R1的增大而增大,即转向半径增大,机器人的转向越容易;当滑移角=10°~20°时,转向灵活系数k随着滑移角的增大而增大;当滑移角=20°~25°时,转向灵活系数 并不随着滑移角的增大而增大。因而,当滑移角<20°时,机器人随着滑移角的增大,转向越容易;当>20°时,机器人转向不具有这一性质。
并不随着滑移角的增大而增大。因而,当滑移角<20°时,机器人随着滑移角的增大,转向越容易;当>20°时,机器人转向不具有这一性质。
3.3 小半径转向灵活性分析
当横向阻力系数u1=0.3时,纵向滚动阻力系数u2=1.5 mm,vc=3 m/s,转向半径R1=100~160 mm,小半径转向与灵活性系数的关系曲线如图5所示。由图5可知:小半径转向时,转向灵活系数k1或 随着转向半径R1的增大而增大,即转向半径增大,机器人的转向越容易;当滑移角=10°~20°时,转向灵活系数k1随着滑移角的增大而增大;当滑移角=20°~25°时,转向灵活系数k并不随着滑移角的增大而增大。因而,当滑移角<20°时,机器人随着滑移角的增大,转向越容易;当>20°时,机器人转向不具有这一性质。
随着转向半径R1的增大而增大,即转向半径增大,机器人的转向越容易;当滑移角=10°~20°时,转向灵活系数k1随着滑移角的增大而增大;当滑移角=20°~25°时,转向灵活系数k并不随着滑移角的增大而增大。因而,当滑移角<20°时,机器人随着滑移角的增大,转向越容易;当>20°时,机器人转向不具有这一性质。
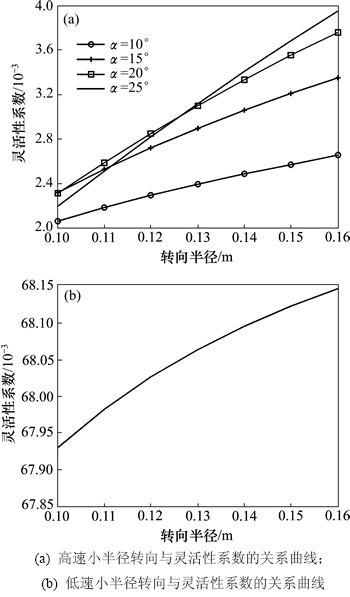
图5 小半径转向与灵活性系数的关系曲线
Fig. 5 Relationship between of small turning radius and flexibility coefficient
3.4 转向功率校核系数分析
当横向阻力系数u1=0.3,纵向滚动阻力系数u2=1.5 mm,vc=3 m/s,转向半径R1=100~200 mm,转向半径与转向功率校核系数的关系曲线如图6所示。
由图6可知:机器人转向时,转向功率校核系数或 随着转向半径R1的增大而减小,即机器人的转向半径越大,外侧履带驱动轮的转向功率越小,选取电动机的功率越小;转向功率校核系数随着滑移角的增大而增大,外侧履带驱动轮的转向功率越大。
随着转向半径R1的增大而减小,即机器人的转向半径越大,外侧履带驱动轮的转向功率越小,选取电动机的功率越小;转向功率校核系数随着滑移角的增大而增大,外侧履带驱动轮的转向功率越大。
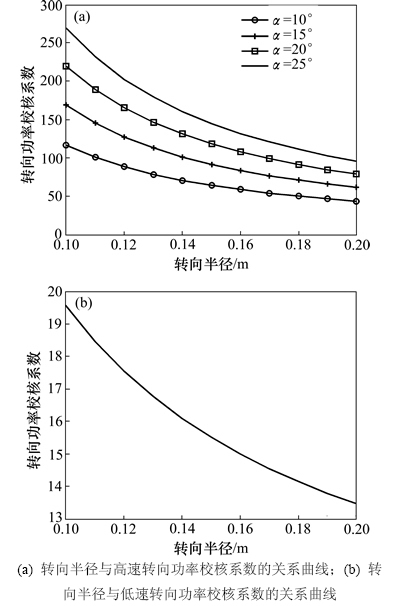
图6 转向半径与转向功率校核系数的关系曲线
Fig. 6 Relationship betwen turning radius and steering power checking coefficient
4 结论
1) 转向半径R1越大,机器人转向越灵活。
2) 当滑移角<20°时,机器人随着滑移角的增大,转向越容易;当>20°时,机器人转向不具有这一性质。滑移角越大,转向功率校核系数越大,外侧履带驱动轮的转向功率越大。
3) 机器人的转向半径R1越大,外侧履带驱动轮的转向功率越小,选取电动机的功率越小。
参考文献:
[1] Lee C H, Kim S H, Kang S C, et a1. Double-track mobile robot for hazardous environment applications[J]. Advanced Robotics, 2003, 17(5): 447-459.
[2] Hamel W R, Murray P, Kress R L. Internet-based robotics and remote systems in hazardous environments: Review and projections[J]. Advanced Robotics, 2002, 16(5): 399-413.
[3] 徐泽亮, 马培荪. 永磁吸附履带式爬壁机器人转向运动灵活性分析[J]. 上海交通大学学报, 2003, 37(Z1): 58-62
XU Zeliang,MA Peisun. Analysis of permanent magnetic tracked wail-climbing robot’s turning agile capability[J]. Journal of Shanghai Jiaotong University, 2003, 37(Z1): 58-62
[4] A1-Milli S, Seneviratne L D, Kaspar A. Track-terrain modeling and traversability prediction for tracked vehicles on soft terrain[J]. Journal of Terramechanics, 2010, 47(3): 151-160.
[5] Solis J M, Longoria R G. Modeling track-terrain interaction for transient robotic vehicle maneuvers[J]. Journal of Terramechanies, 2008, 45(3): 65-78.
[6] 乔凤斌, 谢霄鹏, 杨汝清. 反恐机器人SUPER-01转弯性能分析[J]. 上海交通大学学报, 2005, 39(6): 895-899.
QIAO Fengbin, XIE Xiaopeng, YANG Ruqing. Analysis of SUPER-01 antiterrorist robot’s swerving performance[J]. Journal of Shanghai Jiaotong University, 2005, 39(6): 895-899.
[7] 宋海军, 高连华, 李军, 等. 履带车辆转向性能指标修正与实验[J]. 装甲兵工程学院学报, 2008, 22(6): 65-68.
SONG Haijun,GAO Lianhua, LI Jun,et al. Correction and experiment of steering performance index of tracked vehicles[J]. Journal of Academy of Armored Force Engineering, 2008, 22(6): 65-68.
[8] 刘宁, 单体刚, 吴建华. 质心非对称履带式机器人转向半径的修正与验证[J]. 天津理工大学学报, 2011, 27(1): 11-15.
LIU Ning, SHAN Tigang, WU Jianhua. Revisionand verification turning radius base on asymmetric of deviation of tracked mobile robot[J]. Journal of Tianjin University of Technology, 2011, 27(1): 11-15.
[9] 尚伟燕,邱法聚,杨超珍.差速转向复合式探测机器人运动学分析[J].中国机械工程,2012, 23(2):166-171.
SHANG Weiyan, QIU Faju,YANG Chaozhen. Kinematics analysis of differential steering exploration robot with compound walking mechanism[J].China Mechanical Engineering, 2012, 23(2):166-171.
[10] 吴大林, 马吉胜, 王兴贵. 履带车辆地面力学仿真研究[J]. 计算机仿真, 2004, 21(12): 42-44.
WU Dalin, MA Jisheng, WANG Xingui. Research on track vehicle terramechanics simulation[J]. Computer Simulation, 2004, 21(12): 42-44.
[11] 黄思姬, 欧屹, 陶卫军, 等. 履带式地面移动机器人动力学模型分析[J]. 机电工程, 2011, 28(3): 280-285.
HUANG Siji, OU Yi, TAO Weijun, et al. Dynamics modeling analysis for tracked mobile robot[J]. Journal of Mechanical & Electrical Engineering, 2011, 28(3): 280-285.
[12] 刘同林, 李斌, 吴成东, 等. 可变形机器人协同转向运动研究[J]. 机器人, 2008, 30(1): 34-40.
LIU Tonglin, LI Bin, WU Chengdong, et al. Cooperative turning for a reconfigurable mobile robot[J]. Robot, 2008, 30(1): 34-40.
[13] 欧屹, 钱林方, 陶卫军, 等. 基于土-履应变的履带机器人转向阻力矩建模与分析[J]. 南京理工大学学报, 2012, 36(3): 516-522.
OU Yi, QIAN Linfang, TAO Weijun, et al. Modeling and analysis of steering resistance moment for tracked robot based on track-terrain strain[J]. Journal of Nanjing University of Science and Technology, 2012, 36(3): 516-522.
[14] 李岩, 杨向东, 陈恳. 基于滑动操作模型的履带机器人驱动力设计[J]. 机械设计与制造, 2006, 7(7): 119-121.
LI Yan,YANG Xiangdong,CHEN Ken. Tractive force design of tracked robot based on skip-steering model[J]. Machinery Design & Manufacture, 2006, 7(7): 119-121.
[15] Brown H B, Vande Weghe J M, Bererton C A, et al. Millibot trains for enhanced mobility[J]. IEEE/ASME Transactions on Mechatronics, 2002, 7(4): 452-461.
[16] Kim W, Yi B J, Lim D J. Kinematic modeling of mobile robots by transfer method of augmented generalized coordinates[J]. Journal of Robotic Systems, 2004, 21(6): 301-322.
[17] 朱磊, 郭疆, 刘刚峰. 一种履带机器人滑移参数估计方法[J]. 中南大学学报(自然科学版), 2013, 44(8): 3173-3178.
ZHU Lei, GUO Jiang, LIU Gangfeng. Slip estimation method of track robot[J].Journal of Central South University (Science and Technology), 2013, 44(8): 3173-3178.
[18] 常健, 吴成东, 李斌. 可变形机器人直线构型滑移转向方法 [J]. 机械工程学报, 2012, 48(7): 9-15.
CHANG Jian, WU Chengdong, LI Bin. Shape-shifting robot skid turning with line configuration[J].Journal of Mechanical Engineering, 2012, 48(7): 9-15.
[19] 程军伟, 高连华, 王良曦, 等. 基于打滑条件下的履带车辆高速转向分析[J]. 车辆与动力技术, 2006, 101(1): 44-48.
CHENG Junwei,GAO Lianhua,WANG Liangxi, et al. Analysis of tracked vehicles steering at a high speed considered tracks' skid and slip[J]. Vehicle & Power Technology, 2006, 101(1): 44-48.
[20] 滕启治, 谷中丽, 孙逢春. 履带车辆电驱动系统小半径转向计算研究[J]. 车辆与动力技术, 2003, 90(2): 29-34.
TENG Qizhi, GU Zhongli, SUN Fengchun. Numerical research on small radius steering of tracked vehicles’ electric drive system[J]. Vehicle & Power Technology, 2003, 90(2): 29-34.
(编辑 罗金花)
收稿日期:2014-11-20;修回日期:2015-01-25
基金项目(Foundation item):国防基础科研计划资助项目(B2220110013) (Project(B2220110013) supported by the Defense Industrial Technology Development Program)
通信作者:王建中,博士,教授,从事微小型无人作战平台技术、兵器发射理论与技术研究;E-mail: cwjzwang@bit.edu.cn

