������Ⱥ��Ϊ���¡���ƶ������˽���·���滮
��ö��, ������
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ, ���� ��ɳ, 410083)
ժҪ: ����ƶ�������·���滮, ����Ⱥ��Ϊ��������ѧ�е����߿�¡ԭ���� �����㷨����, ����ȥ���������еľ���ͨ����Ⱥ��Ϊ������, �����һ�ֽ����Ⱥ��Ϊ�����߿�¡���ƶ������˽����滮, �Ͽ��ٵع滮��������ȫ���Ż��Ŀ���·���� ��������Ⱥ��Ϊ�Ķ���ѧϰ��ʽ��·���滮������, �о���ͨ��������Ⱥ��Ϊ�����еIJ���ʵ�ֶ�·���滮�� ͨ������ʵ��, �������㷨��������֤��
�ؼ���: �ƶ�������; ·���滮; ��Ⱥ��Ϊ; ��¡; �����㷨
��ͼ�����:TP278 ���ױ�ʶ��:A ���±��: 1672-7207(2005)05-0739-06
Evolutionary path planning based on swarm behavior and clone for mobile robot
LI Mei-yi, CAI Zi-xing
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: An immune evolutionary planning algorithm with swarm behavior and clone for mobile robot, which combines clone principle in life science with swarm into evolutionary algorithm, was presented. Experiences (excellent individuals) in elapsed evolutionary process were stored by swarm behavior, and by means of swarm behavior and clone, evolutionary algorithms could quickly plan global-optimal path. Relation of learning approaches in swarm behavior and performs of path planning was analyzed, and the multi-path planning could be attained by means of adjusting parameters in the operator of swarm behavior. The simulating experimental results show that the algorithms will improve performance of path planning for mobile robot.
Key words: mobile robot; path planning; swarm behavior; clone; evolutionary algorithms
�ƶ������˽�����������֮һ�����ý�������滮���ܱܿ��ϰ���İ�ȫ������·����
�������е������о�·���滮�о��ɹ��繹�Ϳռ䷨�� �˹��Ƴ����� ����ͼ����, �����ڲ�ͬ�̶ȵIJ���, ���, ����������л����˹滮�͵�����Ϊ�о��ȵ�[1-5]�� ����������Ҳ���䲻��, ��Ҫ�ǽ����㷨��ʽ�����ٶȽ���, ����Ҫ�ķѴ����Ļ���ʱ��, �ﲻ�����߹滮��ʵʱ������Ҫ�� ���������ѡ�� ����ͱ���ı������������·���滮, ������˵ʹ�����ű������ʱ���Ը���1���������·��, ����������̫�� ͨ��, ���ڽ�����·���滮�͵����������˻����˵����ص�, ������µĽ������ӡ�
��Ⱥ�㷨��һ�ֻ���Ⱥ���������㷨[6-8], ������ģ����Ⱥ�����Ϊ�Ļ����ϡ� һ�����ӵ�������Ϊ�ܵ�Ⱥ�����������ӵ�������Ϊ��Ӱ�졣 ���ӵ���Ϊ��һ�ֹ���������Ϊ, ͬʱ, ���ڼ��������ӹ�ȥ�����λ��, ���, �߱��Թ�ȥ����ļ�ѧϰ������
����������������㷨[9]�ǽ��������о���չ����֮һ, �������Ƶ��ŵ�ͽ����㷨���ŵ���н��, �ܹ���߽����㷨�����ܡ�
��������ƶ�������·���滮����, ��������ѧ�еĿ�¡ԭ��[10,11]�� ģ����Ⱥ����Ⱥ�����ͽ����㷨[12-17]����, ����һ����Ⱥ�� ��¡�ͽ����㷨���ϵĻ�Ͻ����㷨, ����ƶ������˽���·���滮�����ܡ�
1 ���������߽��������㷨
1.1 ����ı��뷽��
һ��·���Ǵ���㵽�յ㡢 �������߶���ɵ�����, �߶εĶ˵�нڵ�(��ƽ������(x,y)��ʾ), �ƹ����ϰ����·��Ϊ����·���� һ��·����Ӧ������Ⱥ�е�һ������, һ����������ڵ�����(x,y)��״̬����ɵı�����ʾ, b�̻��ڵ��Ƿ����ϰ����ںͱ��ڵ�����һ�ڵ���ɵ��߶��Ƿ����ϰ����ཻ, �Լ���¼ʹ���ƹ��ϰ�������߲���״̬�� ����X�ɱ�ʾ����:
X={(x1, y1,b1), (x2,y2,b2),��,(xn,yn,bn)}
����: (x1,y1)��(xn,yn)�ǹ̶���, �ֱ��ʾ��ֹ�����ꡣ
Ⱥ��Ĵ�С��Ԥ�ȸ����ij���N, �������ʽ����n-2�������(x2,y2), ��, (xn-1, yn-1)��
1.2 ��Ӧ�Ⱥ���
�������۵���������һ�����·��, Ҫ��·�����ϰ��ﲻ��, ����֤�������ܰ�ȫ��ʻ�� �ݴ���Ӧ�Ⱥ�����ȡΪ:
F(X)=fdist(X)+r (X)+c��(X)��(1)
(X)+c��(X)��(1)
����: r��cΪ������;  , Ϊ·���ܳ�; d(mi,mi+1)Ϊ���ོ�ڵ�mi��mi+1֮��ľ���; ��(X)Ϊ·�����ϰ����ཻ���߶θ���; ��
, Ϊ·���ܳ�; d(mi,mi+1)Ϊ���ོ�ڵ�mi��mi+1֮��ľ���; ��(X)Ϊ·�����ϰ����ཻ���߶θ���; �� , Ϊ�ڵ�İ�ȫ��; Ci���ں����ϰ�����ų���, ��������:
, Ϊ�ڵ�İ�ȫ��; Ci���ں����ϰ�����ų���, ��������:
����: giΪ�߶�mimi+1���������ϰ���ľ���; ��ΪԤ�ȶ���İ�ȫ�������, ����ʵ���л����˳ߴ�ȡΪ8��
1.3 ��������
a. ��������[5]: ��ѡ��ʽѡ��2������, �Զ����н϶̵�1���Ľڵ���Ϊȡֵ����, ��1Ϊ����, ����1�����Ӿ��ȷֲ��������, �Դ���Ϊ�����, ��2��������н�������� �ǽ�������ĸ���Ϊpc��
b. ��¡����: ��ÿһ������, �����������Ϊ����, ���������ѡ1���ڵ�(�������յ�), ���˽ڵ��x�����y����ֱ���ȫ����ռ������������ֵ���档 ��ÿһ������, ����������ڵ�ķ�����¡Nc���ӱ�, ����Nc���ӱ�������ɵ�Nc+1��������ѡ������1�������ʹ��������ѡ��һ������������һ�����������Ρ�
c. ��Ⱥ��Ϊ����: ÿ�����尴��������Ϊ���в�����
d. ��������: �ƹ���ס�˵�·���ϰ���IJ���, ��ͼ1��ʾ��
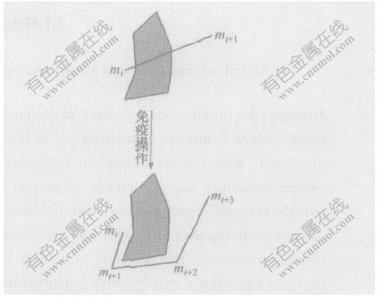
ͼ 1 ��������
Fig. 1 Immune operator
�ӻ������˶��Ƕȷ���, ֱ���������������, ���Ż����ĸ��ӻ�, ���е�·����֮���ӻ�, �ر���ת�Ǵ�ĵ�, �˶������Ѷȱ��, ǰ���ٶȱ�С�� Ϊ�����·���⻬��, ת�Ǵ�ĵ�(������������)Ҫ�ýǡ� �ƹ��ϰ�������߲���������·���ϵĽڵ���ʱǰ��˳���λ, ��Ҫ����ijЩ�ڵ��ǰ��˳��; ��ʱ�ж���Ľڵ�, ��Ҫɾ���� Ϊ��, ʹ��������[5]�еĽ������Ӻ�ɾ�����ӡ�
1.4 ��Ⱥ��Ϊ����
��ÿ��������Ϊ1������, �����µ�������Ϊ���в����� ����Ⱥ�еĸ���(���߽�����)ΪXi(t), ����Ӧ��ֵΪFit(Xi(t))�� ��Xi(t)�����й��������Ӧ��ΪIbesti, ȫ����Ѹ���������Ӧ��ΪGbest��
a. �Ƚ�ÿ�����嵱ǰ��t����Ӧ�����������й��������Ӧ��Ibesti, ���Fit(Xi(t))��Ibesti, ��ô,
b. ��ÿ�������������ȫ����Ѹ������Ӧ��Gbest���бȽ�, ���F(Xi(t))��Gbest, ��ô,

c. ������ж��ٶ�Ϊ:

����: ��1�ͦ�2Ϊ��������� ��1�ͦ�2ȷ��Ϊ��1=r1c1, ��2=r2c2�� r1, r2~U(0,1), ��c1��c2Ϊ�����ٶȳ���, U(0, 1)��[0,1]�ϵľ��ȷֲ�������
d. ��ÿ�����尴��ʽ���е���:
Xi(t+1)=Xi(t)+vi(t+1)��(6)
�����ж��ڽڵ��������ͬ�����, �Խڵ������С������Ϊ��, ��ȥ�ڵ�����϶�����еĽڵ㡣 ʵ��ʱ, vi(0)ȡΪ0��
1.5 �㷨�������������ӷ���
1.5.1 �㷨����
�ڽ������߲����Ľ���������������ѡ��[8], ���ǽ����߲��������ĸ���X�����丸��X���бȽϡ� ����Ӧ�ȵõ��Ľ�, ������丸��, ������p(X)=exp((F(X)-F(X��))/Tk����丸���� �ڱ���ʵ����, ����ѡ����TkȡΪTk=1/ln(k+1)�� ����, k�ǽ���������
������Ⱥ��Ϊ�����߿�¡���ƶ������˽���·���滮�㷨Ϊ:
a. ��ʼ��Ⱥ��;
b. ����Ⱥ�����Ӧ��;
c. ��������ͣ��������ѭ��ִ��:
{
d. ѡ�����;
e. �������;
f. ��¡����;
g. ��Ⱥ��Ϊ����;
h. ɾ�����Ӳ���;
i. �����߲�����������;
j. ����ѡ��;
k. ����Ⱥ�����Ӧ��;
l. ����һ�������ŵĸ��������Ⱥ;
m. ��̭���ָ���, ������Ⱥ��ģ;
}
n. �����Ⱥ�е����Ÿ��塣
Ϊ�˷���, �ƴ��㷨ΪSBICEPP�㷨��
1.5.2 ��������
���������߽����㷨�����ӹ�������, ����������Ҫ�����Ǿֲ��Ե�, �����㷨����ȫ�����õ�, ���, ���Ĺ�����㷨��ȫ���������ܽϺõĽ����㷨�;ֲ��Ż�������ǿ���������ӵĽ��; �Ӹ�����Ӧ���������������, ���ʽ(1), �ƹ��ϰ�������������ܽ�������·���任Ϊ����·��, �ý�������ʹ�˶�·����ø��⻬, ���Բ�����·�����й⻬�������߲���, ������С�ڿ���·�����й⻬��, ��ɴ�ʽ(1)��ϵ��ȷ�������ֳ����� �����������, ������·�����й⻬�������߲�������Ӧ��С���ƹ��ϰ�������߲������ʡ�
������ǿ���·��, ���й⻬�������߲������ʽ��ʵ�����
״̬b�б������ƹ��ϰ�������߲����ļ�¼, ָ���⻬����ɾ���ڵ������ʹ��Ƶ��, �ƹ��ϰ�������߲��������ļ����ڵ�, �����ļ���������, Ӧ��ʹ�ýϴ�ĸ��ʽ���ɾ�������⻬��������
״̬b�����¼����������: ���ڵ㵽��һ�ڵ���ɵ��߶��Ƿ����ϰ����ཻ; �ƹ��ϰ�������߲�����¼, ���˽ڵ��ڵ���ʹ���ƹ��ϰ��������I�ͱ������, ���ô˴�Ϊij������k(����ķ���ʵ����k=6), ����II�ͱ������, ���ô˴�Ϊk/2; ��ʹ���˹⻬����ɾ���ڵ����, ���ֵ��1; ����ֵΪ0ʱ, ���й⻬����ɾ���ڵ�����ĸ���Ϊpd0(����ʵ��ȡ0.2),����Ϊpd1(����ʵ��ȡ0.8)��
2 ����ʵ��
����ͼ2��ʾ�Ļ���, ���з���ʵ�顣 ͼ2��λ����ߵ�С�����ǻ����˵���ʼλ��(S), ��Ӧ��, �ұߵ�С��������ֹλ��(G)��
���ֱ����50�η���ʵ��, ��¼��������ȫ�����Ž�ʱ����������, Ȼ�����ƽ������������ ������������ͽ��ƽ����Ӧֵ��
��50�η���ʵ�����еĽ�����ڱ�1��, �ɿ������Ĺ�����㷨�����ٶȽϿ졣
����ʱ��Ⱥ��ģΪ30, ��Ⱥ��Ϊ�������ʺ�������ֲ������ʷֱ�Ϊ0.3, �������pc�Ϳ�¡����pm��������Ӧ�Ը��ʼ��㹫ʽ������Ӧ�Ե���:
����: fav��fmin�ֱ�Ϊ��Ⱥ��ƽ����Ӧ�Ⱥ���С��Ӧ��; f��Ϊ���ڽ��������2�������н�С����Ӧ�ȡ�
����ѡ��ĸ��ʰ���ʽ����:

����: j=1, ��, N; 0��q��1; NΪ��Ⱥ��ģ�� �������ֵ�����Ÿ����ѡ����ʡ� ʵ��ʱȡq=0.6(ͼ2)��
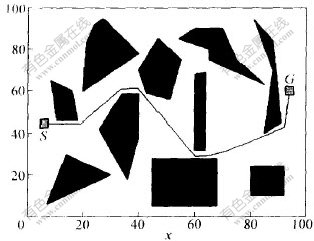
ͼ 2 ����·���滮���
Fig. 2 Result of evolutionary path planning
ɾ���ͽ������ʷֱ�Ϊ0.4��0.6, r=2000, c=5000, ��=0.6�� NcȡΪ10, ��Ⱥ��Ϊ������c1��c2�ֱ�ȡΪ0.5�� ������Matlab 6.1�½���, ������PIII 850, �ڴ�Ϊ128 Mb�� ���бȽϵ������㷨�IJ������������е�������á�
�� 1 4�����ڽ������Ƶ�·���滮�㷨�Ľ���Ա�
Table 1 Comparison of four path planning algorithms based on evolutionary mechanism
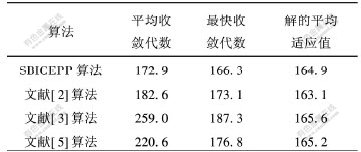
��1��ʾ����˵����������Ľ����Ⱥ��Ϊ������������ֵĽ���·���滮�㷨�����ܱ�����3�ֽ����йص�·���滮�㷨�á�
3 ��Ⱥ����ѧϰ���·���滮
����ʹ�õ���Ⱥ��Ϊ������2�������: ��Ⱥ����ѧϰ(��ʽ(3)����)����Ⱥ��������ѧϰ(��ʽ(4)����)�� ��Ⱥ����ѧϰ�Ľ���Ǹ������Լ���ʷ���������λ������, �����˸������ҷ�չ, �⽫���½�����Ⱥ���нϺõĶ����ԡ� ��Ⱥ��Ⱥ�������ߵĽ������Ⱥ�����и��嶼��ͬһ��λ������, ��������Ⱥ��ͳһ��, �⽫���½�����Ⱥ�������½���
��·���滮�ǽ�����һЩ�о��ߵ��о�����, ���о�ԭ�����ڵ�ͼ��������ȫ�����뻷��һ��, ��������ijЩ����������ʹԭ���滮��·������ͨ��, ��Ҫ����·���� ����ҽԺ�����ϵ����Ļ�����, �������ȱ�ͻ���¼���ס��, ����Ҫ������ͨ��; ��·�ϵ�����������������ڷ�����ͨ�¹�, ��Ҫ������·�ߡ� ����Щ�����, ����Ҫ��·���滮, ���滮�õĶ���·������, ����Ҫ��ʱ��, ����������Ӷ���·����ѡ��1���������ˡ�
��·���滮���������Ķ����������, �����Դ�, ��ʾ��Ⱥ�и���֮���нϴ�IJ�� ����·���滮����, ������Ⱥ�д��ڶ�����ͬ������·���� �������������н���ʱ, ��Ⱥ���Դ����㹻��IJ�ͬ����·��, �������������п��ܵ�·��, ��ﵽ�˶�·���滮��Ŀ�ꡣ
Ϊ�˴ﵽ��·���滮��Ŀ��, ���ǰ����Ⱥ��Ϊ2��ѧϰ�����ķ���, ������µIJ�����������: ��Ⱥ��Ϊ������c1��c2�ֱ�ȡ��ͬ��ֵ; ��������ѧϰ�����ij���c1ȡ�ϴ��ֵ; �෴��, c2ȡ��С��ֵ; ͬʱʹ�ý�С��ѡ��ѹ��, Ҳ����˵, ����ѡ��ĸ���ʽ(9)��qȡ��С��ֵ, ��Ϊq��С, ������ѡ��ѹ���Զ����ȵĸ���Ӱ�졣
Ϊ�˼������������������ԵĿ�����, �����˶�·���滮�ķ��档 ͼ3��ʾΪ��Ⱥ���Ѿ��������ܹ��ܿ������ϰ���IJ���·��, ���ǻ����ϸ��������п��ܵ�·��(��Щ�ϰ���֮�����̫С, ���û��·������), ����·�̶̵�·����һЩ�� ͼ4��ʾΪ��Ⱥ��һЩ���ڼ��������ŵ�·��, ���ǻ����ǿ���·��, ��ͬ�̶ȵ����ϰ����ཻ�� �����������˵��, ͨ�������IJ�������, ��Ⱥ�ڽ���������, �����ܹ��϶���������ҷ�չ����Ի�����, һЩ���������, ������һЩ���������, �ȱ�֤�˸������Լ�����(·�̶̵ĸ����һЩ), �ֱ�֤�˸���ĸ�����(�����ϰ��������п��ܵ�·��)��
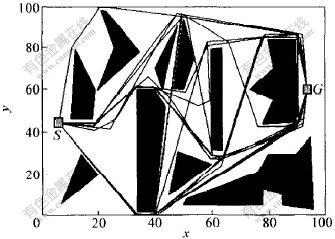
ͼ 3 ��·���滮���(A)
Fig. 3 Result (A) of multi-path planning
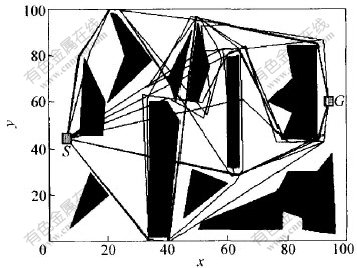
ͼ 4 ��·���滮���(B)
Fig. 4 Result (B) of multi-path planning
ʵ��ʱ, ��Ⱥ��Ϊ�����еIJ���c1��c2�ֱ�ȡΪ0.9��0.1�� ʽ(9)��q=0.2, ����������������ǰ�����ͬ��
4 �� ��
a. ����ƶ������˹滮�뵼��������ص�, ����Ȼ����ϵͳ�еĿ�¡���ƹ����¡����; ͬʱ, ���������������������, ��ģ���˻�ԭ������������ѡ�����ӡ�
b. ģ����Ⱥ��Ϊ, ��������Ⱥ��Ϊ����, �ﵽ��Ⱥ�и���֮�����ٽ��ͶԹ�ȥ����ļ�ѧϰ��
c. �о�����Ⱥ��Ϊ��2��ѧϰ���·���滮֮��Ĺ�ϵ, ָ��ͨ��������Ⱥ��Ϊ�IJ���ʵ�ֶ�·���滮��
d. ���÷���ʵ����㷨��������֤, ��������һЩ�㷨�����˱Ƚ�, ֤ʵ�˱��Ĺ�����㷨����Ч���Ͽ��ٵع滮����ȫ��ȫ��(��)���ŵ���·���ʹﵽ��·���滮��Ҫ��
�����:
[1]Nachol C. Time-optimal path planning and control using neural networks and a genetic algorithm[J]. International Journal of Computational Intelligence and Applications, 2002, 2(2): 153-172.
[2]��ö��, ������. �Ľ��Ľ�����̼����ڻ�����·���滮�е�Ӧ��[J]. ������, 2000, 22(6): 490-494.
LI Mei-yi, CAI Zi-xing. Improved evolutionary programming and its application on path planning of robots[J]. Robot, 2002, 22(6): 490-494.
[3]Xiao J, Michalewisz Z, Lin H S. Evolutionary planner/navigator: operator performance and self-tuning[A]. Koza J R. Proc IEEE Int Conf Evolutionary Computation[C]. Nagoya: IEEE, 1996. 366-371.
[4]Prahlad V, Kay C T, Wang M L. Evolutionary artificial potential fields and their application in real time robot path planning[A]. IEEE Computer Society. Proceedings of the IEEE Conference on Evolutionary Computation[C]. California: IEEE, 2000. 256-263.
[5]����. �ƶ����������������Ľ����������ۼ���ϵͳƽ̨�Ŀ�����Ӧ���о�[D]. ��ɳ: ���Ϲ�ҵ��ѧ�Զ�����ϵ, 1999.
ZHOU Xiang. Research on the Theory of Evolutionary Control for Navigation of Autonomous Mobile Robot with Development and Application of Its System Platform[D]. Changsha: Department of Automation Control, Central South University of Technology, 1999.
[6]Kennedy J, Eberhart R C. Particle swarm optimization[A]. Proc IEEE International Conference on Neural Networks[C]. Perth: IEEE, 1995. 1942-1948.
[7]Eberhart R, Shi Y, Kennedy J. Swarm Intelligence[M]. San Francisco: Morgan Kaufmann, 2001.
[8]������, ���v. �˹����ܼ���Ӧ��(��3��)[M]. ����: �廪��ѧ������, 2004.
CAI Zi-xing, XU Guang-you. Artificial Intelligence: Principles and Applications(3rd Edition)[M]. Beijing: Tsinghua University Press, 2004.
[9]Jiao L C, Wang L. A novel genetic algorithm based on Immunity[J]. IEEE Trans on Systems, Man, And Cybernetics-Part A: Systems and Humans, 2000, 30(5): 552-561.
[10]Roitt I M, Delves P J. Essential immunology(10th Edition)[M]. London: Blackwell Science Inc, 2001.
[11]½��Դ, ������. �ִ�����ѧ[M]. �Ϻ�: �Ϻ���ѧ����������, 1998.
LU De-yuan, MA Bao-li. Modern Immunology[M]. Shanghai: Shanghai Scientific and Technical Press, 1998.
[12]�¹���, ���㷨, ׯ��Ȫ,��. �Ŵ��㷨����Ӧ��[M]. ����:�����ʵ������, 1996.
CHEN Guo-liang, WANG Xi-fa, ZHANG Zheng-quan, et al. Genetic Algorithms and Application[M]. Beijing: Post and Telecommunication Press, 1996.
[13]����,������. �Ŵ��㷨ԭ����Ӧ��[M]. ����: ������ҵ������, 1999.
ZHOU Ming, SUN Shu-dong.Genetic Algorithms: Theory and Applications[M]. Beijing: National Defence Industry Press, 1999.
[14]Goldberg D E.Genetic Algorithms in Search, Optimization and Machine Learning, Reading[M]. MA: Addison-Wesley, 1989.
[15]Srinvas M, Patnai L M. Adaptive probabilities of crossover and mutation in genetic algorithms[J]. IEEE Trans Syst, Man, and Cybern, 1994, 24(4): 656-666.
[16]Cao H, Yu J, Kang L, et al. Modeling and prediction for discharge lifetime of battery systems using hybrid evolutionary algorithms[J]. Comput Chem, 2001, 25(3): 251-259.
[17]Hafner C, Frohlich J. Generalized function analysis using hybrid evolutionary algorithms[A]. Angeline P J. Proceedings of the Congress on Evolutionary Computation[C]. Piscataway: IEEE,1999. 287-294.
�ո�����:2005-01-28
������Ŀ:������Ȼ��ѧ����������Ŀ(60234030, 60404021)
�����:��ö��(1962-), ��, ����������, ��ʿ�о���, ������, �������ܼ��㡢 ͼ��ʶ�� ���ܻ������о�
������ϵ��: ��ö��, ��, ������; �绰: 0731-8830583(O); E-mail: meiy_li@yahoo.com.cn
