���ܿ��Ƽ��ƶ��������о���չ
�� �� ��
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ, ���� ��ɳ, 410083)
ժҪ: ��̽���Զ��������ٵĻ�������ս�Ļ�����, ������ܿ��ƵIJ��������ͷ�չ����, ��Ϊ��չ�Զ����Ƶ�һ����Ҫ��·����ʵ�ֿ���ϵͳ�����ܻ�; ������ڽ��е�δ֪�������ƶ������˵��������о�����, �����������ƶ��������о���ijЩ��չ, �漰�ƶ������˿���ϵͳ�Ľṹ�� ������ģ�� ·���滮��������ϵ�; �������ܿ��Ƶ��о�����, �������ܻ����˹滮����ơ� �������̵����ܼ�ء� �Զ��ӹ�ϵͳ�����ܿ��ơ� ���ܹ��ϼ������ϡ� �����������ܿ��ƺ�ҽ�ƹ������ܿ��Ƶ�, ��������ܿ����д���һ���о����������⡣ ���о��������˽����ܿ��Ƽ����ܻ����˵��о���Ӧ�á�
�ؼ���: ���ܿ���; ���ܻ�����; �о�; Ӧ��; ��չ
��ͼ�����: TP242.6 ���ױ�ʶ��: A ���±��: 1672-7207(2005)05-0721-06
Advance in research of intelligent control and mobile robots
CAI Zi-xing
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: Based on the study of the occurrence background and development process of the intelligent control, it was proposed that one of the outlets for developing the intelligent control should be the implementing of the intellectualization of the control systems. Connected with the on going research project of the navigation and control for mobile robot in unknown environment, some advances in research of the intelligent mobile robot in system architecture, environment modeling, path planning and fault diagnosis were proposed. The research and application fields of the intelligent control including the planning and control of the advanced robots, the intelligent supervision of the production processes, the intelligent control of the automatic manufacturing systems, the intelligent fault detection and diagnosis of systems/equipments, the intelligent master of the airplanes, the intelligent control of the medical treatment processes, and the development of the intellectualized apparatuses were overviewed. Further researches of the intelligent control were proposed in this paper. This research result would be beneficial and helpful for understanding the research and application of the intelligent control and the intelligent robot.
Key words: intelligent control; intelligent robot; research; application; advance
20����������ѧ�����������ش��չ���������ǻۡ� ˼ά�� �����ƴ���ijɹ�; ͬʱ, ��Щ�Ƽ������������ִٽ�����˼��Ľ�š� �����ϵ����ᆳ���˳��ڵĺͲ��ϵĽ�������, �����յõ����������¸���Ʒ�������ࡣ ���д����Ǻ�������ˮƽ������Ҫ��־��
���ܿ��Ʋ��ø������ܼ�����ʵ�ָ���ϵͳ������ϵͳ�Ŀ���Ŀ��, ��һ�־���ǿ���������������Զ����Ƽ����� ���ܿ��ƵIJ����ͷ�չ����ӳ�˵����Զ���������������ѧ�����ķ�չ����, ����ʷ�ı�Ȼ�� ���ܿ����ѳ�Ϊ�Զ����Ʒ�չ��·�ϵ�һ���µ���̱�, ����չΪһ������������������ƵĿ����ֶ�, ���������㷺��Ӧ�á�
�ִ���ѧ������Ѹ�ٷ�չ���ش����, �ѶԿ��ƺ�ϵͳ��ѧ����µĸ��ߵ�Ҫ��, �Զ��������ۺ����������µķ�չ�������Ͼ���ս�� ��ͳ��������, �������䷴�����ơ� �������ƺʹ�ϵͳ���۵�, ��Ӧ���������������⡣ �Զ����Ƶij�·֮һ����ʵ�ֿ���ϵͳ�����ܻ�(intellectualization)��
1 �Զ����Ƶ��������·
��ͳ����������Ӧ�������ٵ��������:
a. ��ͳ����ϵͳ�����������ǽ����ھ�ȷ��ϵͳ��ѧģ�ͻ����ϵ�, ��ʵ��ϵͳ���ڴ��ڸ����ԡ� �����ԡ� ʱ���ԡ� ��ȷ���ԺͲ���ȫ�Ե�, һ������þ�ȷ����ѧģ�͡�
b. �о�����ϵͳʱ, �����������ѭһЩ�ȽϿ��̵ļ���, ����Щ������Ӧ����������ʵ�ʲ����Ǻϡ�
c. ����ijЩ���ӵĺͰ�����ȷ���ԵĶ���, �������Դ�ͳ��ѧģ������ʾ, ���������ģ���⡣
�����һ��ս, �Զ����ƹ����ߵ��������:
a. ��չ��Ұ, ��չ�µĿ��Ƹ���Ϳ��Ʒ���, ���÷���ȫģ�Ϳ���ϵͳ��
b. ���ÿ�ʼʱ֪֮���ٺͲ�����ȷ��, ��������ϵͳ���������м������߸Ľ�, ʹ֪֮֮�϶���������Ƶ�ϵͳģ�͡�
c. ������ɢ�¼������Ķ�̬ϵͳ�ͱ�������ȫ������ϵͳ��
����Щ������Կ���, ϵͳ����Ϣ�����Լ��˹�����˼��ͷ��������뽨ģ����, ����ģ����Ϊ�̶������, ���Dz����ݻ���ʵ�塣 ��������ģ�Ͳ������н�������ֵ, ���Ұ������Ժͷ������ݡ� ����������ԵĺͶ�̬��, �߶ȷ�ͬ���ĺͷǽ�����, �����Ƿ���ֵ�ġ� ���ڷ���ȫ��֪��ϵͳ�ͷǴ�ͳ��ѧģ��������ϵͳ, ���뽨�����������ɡ� �����㷨�� ���Ʋ��ԡ� ���ƹ����Э������ۡ� ʵ����, �����Ҫ�������ܻ�����ϵͳģ��, ���߽�����ͳ���������ܷ����Ļ��(����)����ģ��, ������ľ�����ʵ�ֿ����������ܻ���
��������������ٵ�����, ������Ҫ��չ���������뷽��, ������Ҫ������Ӧ�ü������ѧ�빤�̵����³ɹ��� ����, �������͵�ʵʱ�������źŴ���ϵͳ�ǹ��̽����ٵ������ս������֮һ; ���漰Ӳ���� ����������(�������㷨)�Ľ��, ��ϵͳ��������Ҫ�Ƚ��Ĺ��̹���������
�˹����ܵIJ����ͷ�չΪ�Զ�����ϵͳ�����ܻ��ṩ����֧�֡� �˹����ܵķ�չ�Ѵٽ��Զ��������Ÿ��ߵ�ˮƽ�������ܿ��Ʒ�չ�� �˹����ܺͼ������ѧ���Ѿ����һЩ������ ʾ���ͼ���, ���ڽ���Զ��������ٵ����⡣ ����: ������ɢ�ṹ������ʽ��������(ר��ϵͳ��ǡ� ������������ƺ�����������); ���ڽ�ɫ(actor )������(Agent )�Ĵ��������ģϵͳ������ģ��; ģ����Ϣ��������Ƽ���; �������㡢 �Ŵ��㷨�� ��Ȼ�����Լ�������Ϣ�ۺ��˹�������Ŀ���˼��ͷ����ȡ�
�Զ����Ƽ������Ͼ���ս, �ִ������÷�չ������ Ϊ�˽�����ٵ�����, һ����Ҫ�ƽ�����Ӳ���� ���������ܵĽ��, ʵ�ֿ���ϵͳ�����ܻ�; ��һ����Ҫʵ���Զ����ƿ�ѧ��������ѧ�� ��Ϣ��ѧ�� ϵͳ��ѧ�Լ����ܿ�ѧ�Ľ��, Ϊ�Զ������ṩ��˼�롢 �·������¼���, ������Ե������ѧ��, �ƶ����ܿ��Ƶķ�չ[1, 2]��
2 ���ܿ��Ƶķ�չ
���ܿ������˹����ܺ��Զ����Ƶ���Ҫ�о�����, ������Ϊ��ͨ�����������ݽ�·���Զ����ƵĶ��㡣 ͼ1��ʾΪ�Զ����Ƶķ�չ���̺�ͨ�����ܿ���·���Ͽ��Ƹ��������ӵĹ��̡� ����·������Զ�������ܿ���, ������Ŀǰ����ˡ�
�˹����ܵķ�չ�ٽ��Զ����������ܿ��Ʒ�չ�� ���ܿ���˼����һ�γ�����20����60���, �������ܿ��Ƶ�˼��ͷ�����������õ���չ��
����40��ǰ, ѧϰ���Ƶ��о���ʮ�ֻ�Ծ, �����Ӧ�á� ѧϰ������Ҫ�����ڿ����۳���ʱ����ġ� ��ѧϰ������Ӧ�����������������ڽ������ϵͳ������������⡣ ���, ѧϰϵͳ�����ڷ��п��ơ� ģʽ������ͨѶ��, ����, �˵�վ�Ŀ��ơ�
20����60�������, �Զ��������˹����ܿ�ʼ���ӡ� 1965��, ���������������ѧ�Ҹ��������Ȱ��˹����ܵ�����ʽ������������ѧϰ����ϵͳ; Ȼ��, ������1971���������˹��������Զ����ƵĽ��ӹ�ϵ�� ���ڸ���������Ҫ����, ���ѳ�Ϊ���ʹ��ϵ����ܿ��Ƶ������ߺ͵���ˡ�
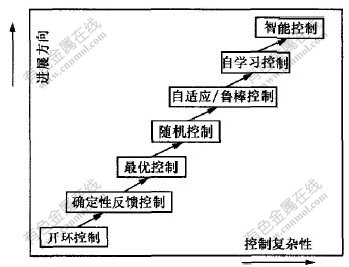
ͼ 1 �Զ����Ƶķ�չ����
Fig. 1 Development of automatic control
ģ�����������ܿ��Ƶ���һ��Ծ�о����� ����(Zadeh)��1965�귢���������������ġ�ģ�����ϡ�(fuzzy sets)�� �˺�, ��ģ�����Ƶ�����̽����ʵ��Ӧ��2������, �������˴����о�, ��ȡ��һ�����˸���Ȥ�ijɹ���
1967��, ������(Leondes)���״���ʽʹ�á����ܿ��ơ�һ�ʡ� ���ڵ����ܿ���ϵͳ����һЩ�Ƚϳ��������ܷ���, ��ģʽʶ���ѧϰ������, ���ҷ�չ�ٶ�ʮ�ֻ�����
��ʮ������, �����˹����ܺͻ����˼����Ŀ��ٷ�չ, �����ܿ��Ƶ��о�����һ���µ��ȳ��� �������ܾ��ߡ� ר�ҿ��ơ� ѧϰ���ơ� ģ�����ơ� ���ơ� �����Ӿ����ơ� ���ܹ滮������ϵ�ϵͳ�ѱ�Ӧ���ڸ��ҵ���̿���ϵͳ�� ���ܻ�����ϵͳ�����ܻ�����(����)ϵͳ��
�����˹(Saridis)�����ܿ���ϵͳ�ķ����������ס� �������ܿ��Ʒ�չ��·�ϵ���Զ����Ϊ�˹����ܡ� ����Ϊ, �˹������ܹ��ṩ��߲�Ŀ��ƽṹ, ������߲�ľ��ߡ� �����˹�������о�С�齨�������ܻ������۲��þ��������ܽ��Ͷ����ԭ���������ݽṹ, ����֯���� Э������ִ�м��� ��Щ˼���Ϊ�ݽ����ܿ��ƵĻ�����
��˹����ķ(�@str��m)�� ��ϯ����(de Silva)�� ������� ���ŵ�÷��(Homen de Mello)�� ɣ��ɭ(Sanderson)�Լ����ߵ���20����80����ֱ�����ͷ�չ��ר�ҿ��ơ� ����֪ʶ�Ŀ��ơ� ���˿��ơ� ר�ҹ滮�ͷּ��滮�ȡ� ����, ��˹����ķ��1986������ġ�ר�ҿ��ơ�(expert control)���Ǻ���Ӱ��ijɹ�, �ٽ���ר�ҿ��Ƶķ�չ��
����1943��, �����(McCulloch)��Ƥ�ش�(Pitts)���������ģ��, �������������ģ���������ϵͳ�� ���ų����ģ���ɵ�·�� �����ѧ�ͼ���������ķ�չ, �˹�������(ANN)�������Ϊ�㷺��ע�⡣ ��10������, ������Ԫ���Ƶ����ۺͻ����ѻ��һ��������Ӧ�á� �������Ƶ�����������, �����������������������ѧϰ������ ���������� ���������� ���д��������� �ݴ�������������VLSI�������Ҫ����, ��Ȼ���������ANN�Ŀ���������Ƴ����� �����������Ϊ������(neural controllers), �����в��д����� ִ���ٶȿ졢 ³���Ժ�����Ӧ��ǿ�� ����Ӧ�õ��ŵ�, ������й�����Ӧ��ǰ���� ��������Ϊ���������ɵ�����ϵͳ���ڷ����Ժͷֲ�ʽ����ϵͳ�Լ�ѧϰϵͳ�еõ����ٳɹ�Ӧ�á�
�������ܿ�����ѧ���γɵ���������, 1985��8��, IEEE������ŦԼ�ٿ��˵�һ�����ܿ���ѧ�����ۻᡣ ���ϼ������������ܿ���ԭ�������ܿ���ϵͳ�Ľṹ�� 1987��1��, �������ѳ���IEEE����ϵͳѧ��������ѧ�������ٿ������ܿ��ƹ��ʻ��顣 �����й����ܿ��Ƶĵ�һ�ι��ʻ���, ��ʾ�����ܿ��Ƶij����չ; ͬʱҲ˵����: ���������¼�������ij����Լ���������뼼���ķ�չ, ��Ҫ���¿��ǿ����������ڽ�ѧ�ơ� ��λ��鼰���������¼�����, ���ܿ�����Ϊһ�Ŷ���ѧ������ʽ�ڹ����Ͻ���������
��1987������, һЩ����ѧ����֯���ڻ��ڵؾٰ�����й����ܿ��ƵĹ���ѧ����������ֻ�, ��һ���̶��Ϸ�ӳ�����ܿ��Ʒ�չ����ͷ, Ҳ�Թ������ܿ��Ƶķ�չ�ϴ���ƶ����á�
��10������, ���ڶ����ܿ��Ƶ��о�Ҳ��ʼ��Ծ����, ���ѧ����֯���ϳ���, ѧ�����龭���ٿ�, ���ܿ��Ƶ�Ӧ���о�(�����Զ���)Ҳȡ��һ���ɹ��� ��������һЩ�����ܿ���ѧ���йص�ѧ�����塣 ��Щ����, ���ܿ�����Ϊһ�Ŷ�������ѧ��, Ҳ���ҹ����������ˡ�
������, �Լ�������Ϊ������һЩ�µ����ܿ��Ʒ����ͼ����ѱ��Ⱥ�������� ��Щ�µ����ܿ���ϵͳ�з��˿���ϵͳ�� ��������ϵͳ�����߿���ϵͳ�ȡ� ���˹�����ѧ�����, ���ܿ���ѧ�ƾ��нϴ��������, ��û�г��ֹ��ڼ��ҺͶ��������ۡ� �������ܿ��ƽ����ij���, ���������������ڵ��������ܿ���ר��ʵ���ϾͰ�3����ͬ��֪ѧ�ɵ�˼���ںϺᴩ�����ܿ���ѧ��֮��[1-3]��
3 �ƶ��������о���һЩ��չ
���ܻ��������˹������������ѧ�Ľ����о�����, �������˵����ܿ����������ܿ��Ƶ���ҪӦ���о����� �ƶ���������Ҫ�о����ݰ�����ϵ�ṹ�� ������ģ�붨λ�� ·���滮�� �˶����ơ� ����������ݴ����Ƶ�[4-11]�� ����������߽�������δ֪�����������ܿ����йص��ƶ��������о�����ȡ�õ�ijЩ��չ���Լ�Ҫ���ܡ�
3.1 ϵͳ��ϵ�ṹ
�����ʵ����һ��δ֪�������ƶ������˵ķֲ�ʽ����ϵͳ�� ��ϵͳ���ü����״�ƽ̨�Ͷ��Ӿ�ϵͳ��Ϊ������֪��, ��2Dƽ��ɨ��ļ����ഫ�������ʵ��3D�����к�, �������θ߶�ͼ�Ա�Կ���������ϰ�������з����� ���������ǡ� ����Ǻ���̼Ƶȴ����������ƶ������˵ĺ����Ƶ�ϵͳ�� ����ϵͳ���û��ڶ�ϵͳ���ɵĹ��ػ�, �������õ���չ���ܡ� ���ؾ���������ϵͳͨ���������Ž���ͨѶ��
�ֲ�ʽ����ϵͳͨ���칹������(Agent)���Э��ʵ�ָ��ӻ����еĸ�֪�뵼�����ơ� ��ϵͳ�ṹ�ϰ�������˼�㡢 ���Ʋ��Э����, �ɶ���칹�����������Ӧ���ܡ� ��̬�ֲ��滮���ݼ����״��ȡ�Ļ�����Ϣ��ȷ���ֲ���Ӧ��Ϊ�� ��˼�滮������D*�㷨����������ֲ��������塣
3.2 ������ģ�붨λ
��贵�[3]�Ƚ�ȫ��ظ�����δ֪�������ƶ������˵���������ģ�о��Ľ�չ�� �����˻�����ģ�ķ���, �����Ƚ���3����Ҫ����ģ�ͼ�����ȱ��, ָ��������ģ�о����ٵ�����, ���������о��ƶ������˵Ļ�����ģ������Ҫ�ο����á�
�������Ӿ���δ֪�������ƶ������˻�ȡ������Ϣ����Ҫ�ֶ�, �Ի�����ģʮ����Ҫ�� �������һ�ֻ��ڳ߶ȿռ����۵�Harris�ǵ��ⷽ���� �÷����ڱ���Harris�ǵ㲻�ܹ����������������̬�仯Ӱ���ͬʱ, ���ܼ�����߶��µ������㡣 ���ڸ÷������г߶Ȳ�������, ��������ڳ߶ȱ仯�ϴ���Ӿ�ϵͳ��
3.3 ·���滮�����
����Ⱥ����������ԭ���������㷨����, ���һ�ֻ�����Ⱥ��Ϊ�����߿�¡���Ƶ��ƶ������˹滮����, �ܹ��Ͽ�ع滮������ȫ���Ż�Ҫ��Ŀ���·���� ���滮�������ܹ�ͨ��������Ⱥ��Ϊ��������, ʵ�ֶ�·���滮�� ���һ������RBF������Ŵ��㷨ʵ�ֶԹ�������Ư�����ģ�͵ı�ʶ������ ����, ����˻���Elitist�������Ƶ��Ŵ�����ѵ�������� �÷����ܹ��������ٹ������ݵ����, ����ƶ������˵�����λ�ľ���[10]�� �����һ�ֻ��ڼ����״���ƶ�������ʵʱ�����㷨�� ���㷨���ǵ������˵ķ�����Լ��, ���û���Բ���켣��·���滮, ��ƽ��·���ƽ�Ŀ��λ��, ����ǿѧϰ�������Ż������˵ı�����Ϊ, �����ü����״�ľ�����Ϣ�γɴ̼�����Ӧʽ��Ϊ, ��ʵ�ֶ�̬�����еı��ϡ�
3.4 �������
�ڹ�����Ϸ���, ���һ�ֻ��������˲������ƶ������˹��Ե���ϵͳ�������Ĺ�����Ϸ���[11]�� �÷����ѻ��ڹ����������������˲�������, ����ǰ��ȷ���������˶�״̬, ���ú����Ӹ����˶�״̬, ��Ч�ؽ���˵������˲������Ա�ʾ�ĸ���������, ��������Ч�ʺ;��ȡ�
4 ���ܿ��Ƶ�Ӧ���о�����
���е����ܿ���ϵͳ�����ݽ���ϵͳ�� ר�ҿ���ϵͳ�� ģ������ϵͳ�� ����ϵͳ��ѧϰ����ϵͳ; ����, ����������˿���ϵͳ�� ��������ϵͳ�� ���߿���ϵͳ�ȡ� ��Щϵͳ�����乹��ԭ���� ��ϵ�ṹ�����Է������㷨��; ��ЩϵͳҲ�ڲ�ͬ�ij̶��ϵõ�Ӧ�á�
�����鼸�����ܿ��Ƶ���ҪӦ��[1, 12]��
4.1 ���ܻ����˹滮�����
���Ż����˼�����Ѹ�ٷ�չ���Զ����̶ȵĽ�һ�����, �ѶԻ����˵Ĺ���������ߵ�Ҫ��, �ر���Ҫ���ֲ�ͬ�̶����ܵĻ����ˡ� �������о����������ĵ���Ҫ�о�����֮һ�ǻ������˶��Ĺ滮����ơ� ����һ���涨������֮��, ���ȱ����������������Ҫ����˶��滮; Ȼ��, ����滮���ɿ�����ִ��, �ÿ�������ʹ�������ʵ��ز������������˶���
4.2 �������̵����ܼ��
���ҵ����������, �����֡� ������ ���͡� ���ϼӹ��� ��ֽ�ͺ˷�Ӧ��, ������������Ҫ���ӺͿ���, �Ա�֤�����ܺ߿ɿ��ԡ� Ϊ����������������һ���ľ���, ȷ����Ʒ�����ʸ߲�, ����һЩ����������ҵװ���ϲ�������Ч�����ܿ���ģʽ�� ����, ��תˮ��Ҥ��ģ�����ơ� ���ֻ������ơ� �ֲ�ʽ���ϼӹ�ϵͳ�� �ּ����ܲ��ϴ����� ����pHֵ���̿��ơ� ��ҵ��¯�ĵݽ����ܿ����Լ�����֪ʶ�ĺ˷������Ƶȡ�
4.3 �Զ��ӹ�ϵͳ�����ܿ���
��������ɼӹ�ϵͳ(CIMS)�����Լӹ�ϵͳ(FMS)�ڽ��������Ѹ�ٷ�չ�� ��һ�����ӵļӹ�������, ��ͬ�����µĶ��ֲ����DZ�Ҫ��, ����֤��Ʒ������ �����IJ�ȷ�����Լ�ϵͳӲ���������ĸ�����, �����ƹ���ʦ����ƺ�ʵ����Ч�ļ��ɿ���ϵͳ�纸�ӹ��̵�ģ�����ơ� ������ҵ�������̵����ơ� ���ػ����ӹ����ܿ��Ƶ��������ս��
4.4 ���ܹ��ϼ�������
���ϼ����������̼��������ء� һ�����Ĺ��̿���ϵͳӦ�����й����Զ��������������, �Ա�֤ϵͳ�����ĸ߶ȿɿ��ԡ�
�������ҽ�����ϵͳҲ�����ܹ������ϵͳ�� �������ܹ��ϼ�������(IFDD)ϵͳ��һ�������Ǹ����ѹ۲쵽��״���� ����֪ʶ�;���, �ƶϳ�ϵͳ�� ���������ٵĹ���ԭ��, �Ա㾡���ܼ�ʱ���ֺ��ų�����, �����ϵͳ��װ���Ŀɿ��ԡ� �������̹������ϵͳ�ܹ��˽�����ֵ������Լ���Щ���Լ�Ĺ�ϵ, Ϊ�û��ṩ�������, ����������ȷ�شӲ�ȷ����Ϣ��������Ͻ��ۡ� ���ܹ��ϼ�������ϵͳ��һ���������ļ����ϵͳ, Ҳ��һ�����ܿ���ϵͳ�� ���͵�IFDDϵͳ��̫��վ�ȹ��̿���ϵͳ�Ĺ�����ϡ� ���վ��¯��ˮ���̿���ϵͳ�Ĺ��ϼ������Ϻ��״�������ר��ϵͳ�ȡ�
4.5 �����������ܿ���
���й��̿���һֱ���Զ����Ƶ���ҪӦ���о�����֮һ�� ��������÷ɻ���װ���пɹ�ѡ����Զ�����ϵͳ���Զ���ʻ�ǡ� һ�ֻ���������ķ��п������ܹ������������������ܳ��ֵķ����Կ�������� �������ܹ��Ϻõش������ַ����Ի�δʶ�����Թ�ϵ, ����Щ��ϵ�����Ǽ�ʻԱ�������õġ� ��������ԭ�����ܹ�������һ����ı�������(�紫��������)����һ����������(�����ģʽ����ƶ���)��ӳ�䡣 ��20����80�������, ���ܿ����ѱ�Ӧ���ڷ��й��̿���, �����Ƿɻ��ĸ���(flare)�ͽ���(landing)���ơ�
4.6 ҽ�ƹ������ܿ���
��20����70�����, ר��ϵͳ�����ͱ��ɹ���Ӧ���ڸ���ҽ������ һ�����ڿ�������������������ȵIJ���ƽ������Ѫѹ(MAP)��ģ��������ϵͳ����Ϊҽ�����ܹ��̿��Ƶ������ӡ� MAP�Ǻ���������ȵ���Ҫ������ ��ƺ�ʵ�ָÿ���ϵͳʱ, ����ģ����ϵ���������Թ��� ��ϵͳ�������ͬ����������еõ��ɹ�Ӧ�á�
5 ���ܿ��ƵĽ�һ���о�����
���ܿ�����һ����ѧ��, �����������ϻ�Ӧ����, ��Ȼ��������, �д������о��뷢չ�� ����̽�����ܿ�����Ҫ��һ���о���һЩ���⡣
5.1 ̽����µ�ָ������
Ҫ�Ӹ������˽����ԵĽṹ�빦��, ������ܿ��Ƶ��о�����, ��ҪѰ�Һͽ������µ����ܿ��ƿ�ܺ�������ϵ, Ϊ���ܿ��ƵĽ�һ����չ�����ȹ̵����ۻ����� ��Ҫ�����о����ܿ��ƵĻ������ۺ���, Ѱ��������, �����µĿ��ƻ����� ����, ��������֪ʶ�Ϳ���ϵͳ��ͳһ����, �����غ�ϵͳ���о����ܿ���ϵͳ���ȶ��ԡ� ³���ԺͶ�̬����, ������һ������ģ�͵�ר�ҿ���ϵͳ, �Լ������µĻ��ڷ���ѧ������ѧ���ƻ��Ƶȡ�
5.2 ��ȷ���ܿ��Ƶ��о�Ŀ��
��ΪӦ���о���Ӧ�û����о�, �����Զ�������Ѱ���б��ڴ�ͳ���Ƶ��µĺ���Ч�Ŀ��Ƽ����� Ӧ��������˵�ѡ���Լ����о�����, ����äĿ��, ��ֹ��ˮƽ�ظ�, ������ϸ�ˮ�ijɹ���
5.3 �����Զ���Ҫ������ϵͳ
����һЩ�Ƚϼ�ϵͳ, �������ܿ��Ʋ������ˡ� ��������ܿ���ϵͳ�ĸ����ԡ� �����ʺͳɱ�����ͬ��Ӧ�ô�ͳ����ϵͳ, ��ô, ���ܿ��Ƶ���Խ�Ծͻ��������ɡ� ��֮, ���ܿ��Ƶ������ͻ���ߡ�
5.4 ע�ؿƼ�����
Ҫ��ǿ�������ܿ���Ӳ��������������, �����ܿ����о���, ����ȱ�ٽϺõ���������, Ӳ��������ڵ�������� ����, ���������������Ŀ���ϵͳ, ��ͣ���ڡ����桱ˮƽ��, δ�����������ʵ������, ��̸����ʵ��Ӧ�á� �ⷽ��Ҫ�����²���, ����, ��������ٶ�, ʵ��ʵʱ����, ��߶Ի����ĸо��ͽ�������, ���ģ�黯�������ӿ��Լ������Ϣʶ��ʹ��������ȡ�
6 �� ��
�ع������ܿ��Ƶķ�չ���̡� �о�����ʹ��о�������, ����δ֪�������ƶ������˵������Ƶ�ijЩ�о���չ�����˼�Ҫ����, �����ڶ����ܿ��ƺ��ƶ������˵������Ƶ��˽�, �Խ�һ�������о����ܿ��ƺ��ƶ������˿��ƾ���һ���IJο����á�
�����:
[1]������. ���ܿ���(��2��)[M]. ����: ���ӹ�ҵ������, 2004.
CAI Zi-xing. Intelligent Control(2nd Edition)[M]. Beijing: Electronics Industry Press, 2004.
[2]CAI Zi-xing. Intelligent Control: Principles, Techniques and Applications[M]. Singapore: World Scientific Publishers, 1997.
[3]Meystel A M, Albus J S. Intelligent Systems: Architecture, Design and Control[M]. New York: Wiley & Sons, 2002.
[4]������, �غ���, �º�. δ֪�������ƶ������˵��������о�����������[J]. ���������, 2002, 17(4): 385-390.
CAI Zi-xing, HE Han-gen, CHEN Hong. Some issues for mobile robots navigation under unknown environments[J]. Control and Decision, 2002, 17(4): 385-390.
[5]����, ̷��. �����˿���������״��չ��[J]. ������, 1999, 21(1): 75-80.
FAN Yong, TAN Min. Current state and tendencies in the development of robot controller[J]. Robot, 1999, 21(1): 75-80.
[6]���, ������. δ֪�������ƶ������˲�����ͼ�붨λ(CML)���о���չ[J]. ������, 2004, 26(4): 380-384.
WANG Lu, CAI Zi-xing. Progress of CML for mobile robots in unknown environments [J]. Robot, 2004, 26(4): 380-384.
[7]Mokhtarian F, Suomela R. Robust image corner detection through curvature scale space[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1998, 20(12): 1376-1381.
[8]��ö��, ������. �Ľ��Ľ�����̼����ڻ�����·���滮�е�Ӧ��[J]. ������, 2000, 22(6): 490-494.
LI Mei-yi, CAI Zi-xing. Improved evolutionary programming and its application on path planning of robots[J]. Robot, 2002, 22(6): 490-494.
[9]����, ����, �ο���, ��. ���ڼ����״���ƶ������˻� ����ģ�����[J]. �廪��ѧѧ��(��Ȼ��ѧ ��), 2000, 40(7): 112-116.
YANG Ming, WANG Hong, HE Ke-zhong, et al. Environmental modeling and obstacle avoidance of mobile robots based on laser radar[J]. Journal of Tsinghua University (Science and Technology), 2000, 40(7): 112-116.
[10]YU Jin-xia, CAI Zi-xing, ZOU Xiao-bing, et al. Research on the calibration method for the heading errors of mobile robot based on evolutionary neural network prediction[A]. WANG Jun, LIAO Xiao-feng, YI Zhang. Advances in Neural Networks-ISNN 2005: Second International Symposium on Neural Networks[C]. Chongqing: Springer, 2005. 265-270.
[11]������, ������, �ڽ�ϼ, ��. ���������˲������ƶ������˹ߵ��������������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2005, 36(4): 642-647.
DUAN Zhuo-hua, CAI Zi-xing, YU Jin-xia, et al. Particle filter-based fault diagnosis for inertial navigation system of mobile robot[J]. Journal of Central South University (Science and Technology), 2005, 36(4): 642-647.
[12]������, �º���, κ����. ���ܿ��ƹ����о��Ľ�չ[J]. ���ƹ���, 2003, 10(1): 1-5.
CAI Zi-xing, CHEN Hai-yan, WEI Shi-yong. Research advances in intelligent control engineering[J]. Control Engineering of China, 2003, 10(1): 1-5.
�ո�����: 2005-01-28
������Ŀ: ������Ȼ��ѧ����������Ŀ(60234030, 60404021); ����ʡԺʿ����������Ŀ(02IJY3035)
�����: ������(1938-), ��, ����������, ����, ��ʿ����ʦ, ŦԼ��ѧԺԺʿ, �����˹����ܡ� ���ܿ��ƺ����ܻ����˵��о�
������ϵ��: ������, ��, ����; �绰: 0731-8877355(O); E-mail: zxcai@mail.csu.edu.cn

