文章编号:1004-0609(2015)-07-1904-07
悬臂梁基板对压电纤维复合物驱动性能的影响
朱 松1,陈子琪1,林秀娟1, 2,周科朝1,张 斗1
(1. 中南大学 粉末冶金国家重点实验室,长沙 410083;
2. 济南大学 材料科学与工程学院,济南 250022)
摘 要:压电纤维复合物在驱动、传感、结构健康检测等领域具有广泛应用,研究压电纤维复合物的驱动性能对于压电纤维复合物实际应用具有重要意义。通过实验研究不同驱动电压条件(峰值、频率及偏置)对压电纤维复合物悬臂梁结构顶端位移的影响,探讨悬臂梁基板材料与压电纤维复合物驱动性能的关系,基于欧拉-伯努利梁理论利用悬臂梁顶端位移计算压电纤维复合物的驱动力。结果表明:压电纤维复合物的驱动性能具有明显的迟滞性。悬臂梁顶端位移的大小与驱动电压峰的峰值呈线性关系,且其不仅与驱动电压的峰值有关,还与驱动电压的偏置、频率有关。压电纤维复合物的驱动性能随基板不同而不同,其对刚性铝板的驱动力为5.2 mN,对柔性麦拉膜的驱动力为0.2 mN。
关键词:压电纤维复合物;欧拉-伯努利梁;驱动力;迟滞性;压电陶瓷
中图分类号:TB332 文献标志码:A
Effect of cantilever substrate on actuation characteristics of piezoelectric fiber composites
ZHU Song1, CHEN Zi-qi1, LIN Xiu-juan1, 2, ZHOU Ke-chao1, ZHANG Dou1
(1. State Key Laboratory of Powder Metallurgy, Central South University, Changsha 410083, China
2. School of Materials Science and Engineering, Jinan University, Jinan 250022, China)
Abstract: The piezoelectric fiber composites have important application in the field of actuation, sensing, structural health monitoring and etc. It is important to study the actuation characteristics of piezoelectric fiber composites for a range of applications. The influences of driving voltage conditions (peak-to-peak voltage, frequency, bias) on the actuation characteristics of piezoelectric fiber composites were studied. The relationship between cantilever beam actuation performance of DFCs was investigated through the tip displacement of the cantilever, which was also used to calculate the blocking force based on Euler-Bernoulli beam theory. The results show that the hysteresis of piezoelectric fiber composite exists obviously. The tip displacement of the cantilever has a linear relationship with the driving voltage amplitude, and also is influenced by the driving voltage bias and frequency. The actuation characteristics of the piezoelectric fiber composites differ with different substrates. The blocking force for aluminum-based substrate is 5.2 mN, while it is 0.2 mN for mylar-based substrate.
Key words: piezoelectric fiber composites; Euler-Bernoulli beam; blocking force; hysteresis; piezoelectric ceramics
智能材料是指能感知环境刺激,并能对外界刺激进行分析、处理、判断,并采取一定措施进行适度响应的材料[1]。其中压电智能材料由于其结构刚度高、驱动力大、机电响应转换快等特点[2],是应用最为广泛的一类智能材料。但是压电陶瓷自身固有的脆性及难变形的特点限制了其在弯曲变形场合的应用。美国麻省理工学院智能材料和结构实验室于1993 年首次提出压电纤维复合物(Piezoelectric fiber composites, PFCs)[3]的概念。该类复合材料由平行排列的压电陶瓷纤维、交叉指形电极和聚合物基体组成,不仅具有性能更高的d 33压电系数,而且由于树脂基体引入使得压电纤维复合物具有易变性的特点,因而能应用于传统压电陶瓷难以应用的大变形场合[4]。
压电纤维复合物以其驱动力大、结构适应性好等优点广泛应用可变形机翼、仿生鱼驱动、结构振动控制等领域[5-8]。在作为驱动器使用时,压电纤维复合物具有能量密度大、轻质易变形等优点[9]。林秀娟等[4]和BOWEN等[10]利用有限元法分析了压电纤维复合物中电极尺寸及压电纤维体积分数等重要结构参数对其驱动性能的影响。在实际应用研究中,由于梁结构简单、应用广泛、理论成熟,因此,压电纤维复合物对梁结构的驱动性能研究获得了广泛的关注。BILGEN等[11]首先提出将压电纤维复合物中未极化区域进行线性化处理,获得了悬臂梁结构的顶端位移的解析表达式。随后其又将压电纤维复合物与压电陶瓷驱动器进行对比,指出单位质量下压电纤维复合物具有比压电陶瓷更大的驱动性能[12]。基于四点弯曲试验及有限元分析,BRADLEY等[13]认为压电纤维复合物具有最大驱动力时往往不能获得最大的驱动位移,驱动基体的材料参数对其驱动性能有显著影响。基于层合板理论,LACROIX等[14]认为悬臂梁基板厚度越小,弹性模量越大,悬臂梁顶端位移越大;外加载荷越大,悬臂梁顶端位移越小。
尽管已有许多针对压电纤维复合物驱动性能的研究,但这些研究多集中于对称驱动电压。由于压电纤维复合物的工作电压一般为-500 V至1500 V,针对这种非对称驱动电压,特别是偏置电压对不同悬臂梁基板的驱动性能研究仍然有限。本文作者主要研究了不同驱动电压、偏置及频率下,压电纤维复合物对不同基板材质(铝板和麦拉膜)悬臂梁结构驱动性能的影响,利用悬臂梁顶端位移的变化量对压电纤维复合物驱动性能进行评价,并以此计算出压电纤维复合物的驱动力,为提高压电纤维复合物在实际应用中的驱动性能提供了研究基础。
1 实验
本文作者以铝板及麦拉膜作为悬臂梁基体,选用单片压电纤维复合物作为驱动器,通过测量悬臂梁顶端(图1(b)中的A点)位移在一个外加电压周期内的变化量表征压电纤维复合物的驱动性能。其中图1(a)为压电纤维复合物样品,制备工艺按文献[15]中的报道方法,整体尺寸为63 mm×11 mm×0.3 mm,压电纤维所占的有效面积为27 mm×10 mm。图1(b)为悬臂梁示意图,表1为悬臂梁各组成部分的材料参数。
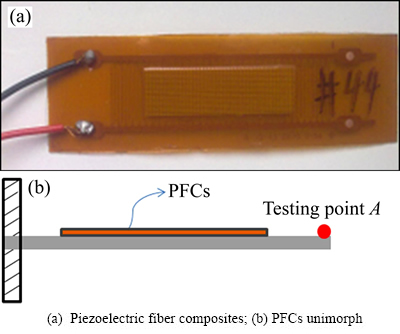
图1 实验样品及装置示意图
Fig. 1 Schematic diagram of specimen and configuration
图2所示为实验系统用于获得悬臂梁顶端位移。其工作原理为首先通过控制计算机编程输出控制信号,经NI机箱处理后至高压放大器,再由高压放大器驱动压电纤维复合物。压电纤维复合物在外加电场的作用下产生变形,产生力矩带动悬臂梁振动,悬臂梁顶端位移由激光位移传感器采集,最终在计算机上进行数据处理和显示。
本研究测试信号波形为正弦波,测试频率分别为0.1、3和10 Hz,偏置电压方向与极化方向相同,具体大小取0、250、500 V,峰峰值电压取250、500、750、1000、1250、1500、1750、2000 V。考虑到过大的负电压将导致压电纤维复合物中的电畴发生反转,因此,控制驱动电压取值范围在-500 V以上。
表1 压电纤维复合物悬臂梁各组成部分的材料参数
Tabel 1 Material properties of components of PFCs unimorphs

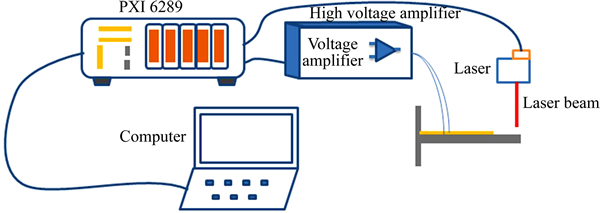
图2 实验系统示意图
Fig. 2 Schematic diagram of experimental system
2 结果与讨论
2.1 典型迟滞性曲线
图3(a)所示为0.1 Hz时不同驱动电压条件下铝板悬臂梁顶端位移的变化曲线。由图3(a)可以看出,曲线具有明显的迟滞性,即悬臂梁顶端位移随着所施加的电压呈非线性关系。在外加电场下,压电陶瓷的应变是由逆压电效应和非180°电畴转向所组成;压电材料在极化后,当所施加的外电场超过临界场强(开始使电畴转向的场强)时,非180°电畴转向具有不完全可逆性。因此,压电陶瓷在高电场条件下具有迟滞性[16]。为了对压电陶瓷的迟滞性进行描述,可以利用迟滞曲线所围成的面积进行表征。图3(b)所示为驱动电压与迟滞性曲线所围成面积的变化规律。从图3(b)中可以看出,随着驱动电压的增加,迟滞曲线围成的面积也逐渐增加,即损耗也越来越大,且迟滞曲线的面积与驱动电压呈非线性关系。当驱动电压峰峰值从250 V提高到1000 V时,迟滞曲线的面积从13.27 mm・V提高到358.57 mm・V,提高幅度达26倍。图3(c)所示为相应的顶端位移变化量与施加电压峰峰值对应曲线。从图3(c)中可以看出,顶端位移变化量与施加电压峰峰值呈线性关系,经线性拟合得该曲线方程为
X=-0.0915+7.156×10-4U (1)
式中:X表示顶端位移变化量,mm;U表示驱动电压峰-峰值,V。若根据线弹性压电悬臂梁理论,悬臂梁顶端位移与外加电压呈线性关系且经过原点[17],但上式中当电压为零时,顶端位移不为0而为-0.0915 mm,这可能是在大电场条件下,压电系数不再是一个常数所导致。
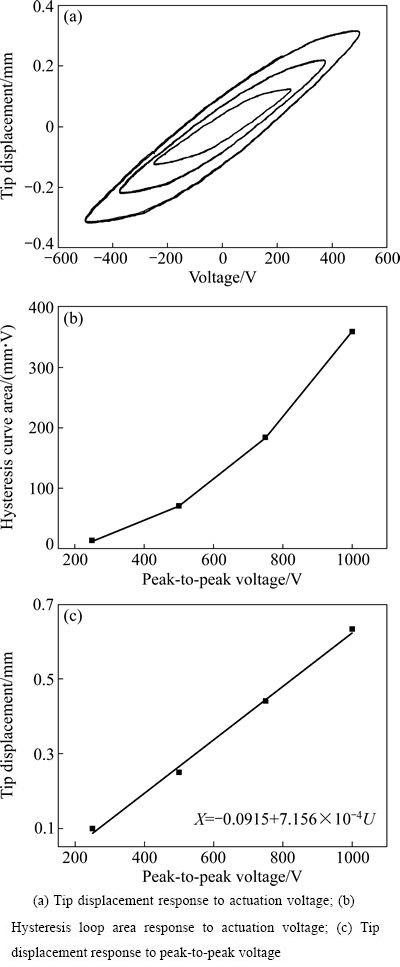
图3 0.1 Hz、0 V时压电纤维复合物的驱动性能
Fig. 3 Actuation properties of PFCs at 0.1 Hz and VDC bias of 0 V
2.2 压电纤维复合物对铝板的驱动性能
图4所示为铝板顶端位移变化量随驱动电压的变化曲线。从图4中可以看出,压电悬臂梁顶端位移变化与驱动电压的频率、偏置及大小均相关,顶端位移变化量随外加驱动电压呈线性关系。当驱动电压大小相同时,顶端位移变化量随着偏置电压的增大而减小,且驱动电压越大,这种现象越明显。这是由于压电纤维复合物的驱动性能是由180°电畴的压电效应和非180°电畴的压电效应所组成,当驱动电压大小相同时,偏置电压越高,电场对非180°电畴运动的阻碍能力越大,非180°电畴运动受阻导致压电纤维复合物的驱动性能下降,因此,偏置电压越高,顶端位移变化量反而越小[18]。同时,在驱动电压频率为0.1 Hz时,当驱动电压峰峰值为500 V时,0 V偏置电压与500 V偏置电压的顶端位移变化量之差为0.033 mm,当驱动电压峰峰值提高到1000 V时,二者的顶端位移变化量之差为0.107 mm,实际使用过程中若以0 V偏置电压下的顶端位移为参考,随着驱动电压的提高,受到偏置电压的影响,顶端位移下降也越明显。当驱动偏置电压为0V,峰值为500 V时,随着驱动电压频率从0.1 Hz增加到3 Hz,再增加到10 Hz,悬臂梁顶端位移变化量从0.342 mm先降低到0.273 mm,再增加到0.298 mm。这种悬臂梁顶端位移的变化量与外加电场频率的关系主要由两部分组成,一部分是由于压电材料中电畴运动受外加电场频率影响,外加电场频率越高,非180°电畴运动能力越低,悬臂梁顶端位移变化量越小;另一部分是由于外界激励频率对悬臂梁基板的影响,外加电场频率越接近悬臂梁固有频率,顶端位移变化量越大。此处悬臂梁顶端位移变化量首先下降主要是因为非180°电畴随着频率的增加运动能力降低,顶端位移也随之降低,随着驱动电压频率逐渐接近共振频率,顶端位移又随之增加。
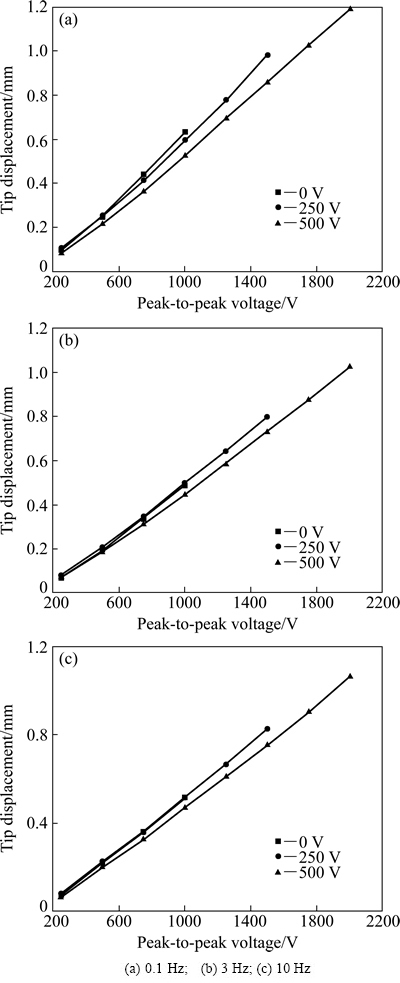
图4 不同频率下驱动电压峰峰值对铝板悬臂梁顶端位移的影响
Fig. 4 Effect of peak-to-peak voltage on tip displacement of aluminum-based cantilever at different frequencies
2.3 压电纤维复合物对麦拉膜的驱动性能
图5所示为麦拉膜顶端位移与驱动电压之间的变化关系。对比图4铝板顶端位移与驱动电压之间关系可以看出,二者形状类似,皆为线性关系,除麦拉膜在10 Hz下的顶端位移随偏置电压增加而增加,其余顶端位移均随着偏置电压的增加而降低。顶端位移随着偏置电压增加而降低可用上一节针对铝板驱动性能的解释。而在10 Hz下麦拉膜顶端位移随偏置电压增加而增加是由于偏置电压改变了悬臂梁基板的谐振频率[19],使得高偏置电压时外加电压频率更接近悬臂梁基频,引起更大的顶端位移变化。具体可解释为,施加偏置电压后,静态的偏置电压将引入静态的弹性常数使材料的弹性常数发生变化,同时由于压电效应的存在又将引起材料体积发生变化,进而使得压电材料的密度发生改变,由于悬臂梁的谐振频率与压电材料的弹性常数和密度相关,尤其是用压电纤维复合物驱动弹性模量较小的麦拉膜,因此,驱动器的谐振频率将随偏置电压变化而变化,谐振频率越接近外加电压频率,顶端位移的变化量也越大。而以铝板为悬臂梁基板时,根据有限元模拟,该类悬臂梁的一阶谐振频率在25 Hz附近[9],远离实验测试所用频率,由偏置电压引起的材料参数的变化对其顶端位移的影响较弱。
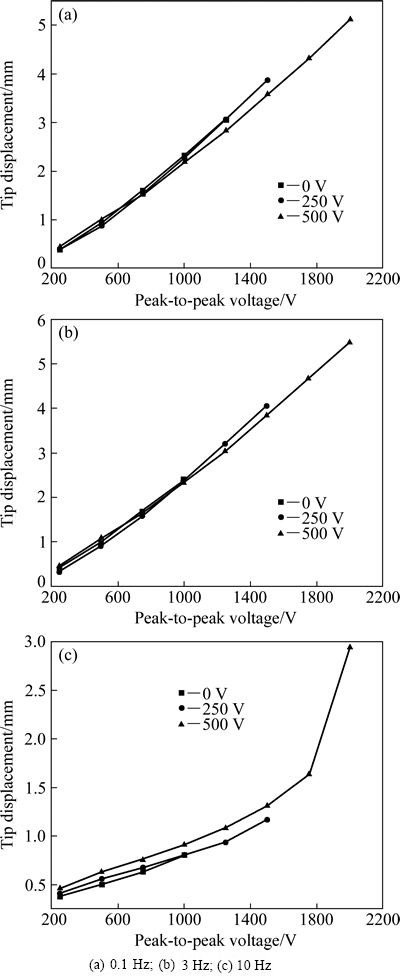
图5 不同频率下驱动电压峰峰值对麦拉膜悬臂梁顶端位移的影响
Fig. 5 Effect of peak-to-peak voltage on tip displacement of mylar-based cantilever at different frequencies
2.4 压电纤维复合物的驱动力
压电纤维复合物的驱动力是指当压电纤维复合物的变形为0时所产生的最大的力[20]。当压电纤维复合物作为驱动器使用时,其驱动力是其重要性能指标。针对压电纤维复合物驱动力的测量,主要有两种测量方法。一种是直接测量压电纤维复合物在自由应变状态下的驱动力;另一种是将压电纤维复合物粘贴在基板上,测量压电纤维复合物对基板的驱动力。当将压电纤维复合物粘贴在悬臂梁基板时,如图2所示。由于悬臂梁顶端位移是由压电纤维复合物变形引起的,如果把压电纤维复合物所产生的力等效为对顶端产生一垂直的集中载荷,则根据经典Euler-Bernoulli梁理论,压电纤维复合物对悬臂梁基板的驱动力与顶端位移存在如下关系[21]
 (2)
(2)
式中:F为驱动力;δ为悬臂梁顶端位移;I为悬臂梁截面的惯性矩,对于矩形截面而言,I=bh3/12,b为悬臂梁的宽度,h为悬臂梁的厚度;E为悬臂梁的弹性模量;L为悬臂梁的长度,具体参数见表1。
由以上公式可以看出,当悬臂梁材质与结构相同时,压电纤维复合物的驱动力与顶端位移成正比关系,顶端位移越大,则其驱动力也越大;在实际应用中,当悬臂梁材质与结构不同时,则应综合考虑二者的影响,利用上述公式进行计算获得压电纤维复合物的驱动力。因此,利用图6中的顶端位移变化量可以计算出压电纤维复合物的驱动力,其中当驱动电压的峰峰值为2000 V时,压电纤维复合物对铝板悬臂梁的驱动力为5.2 mN,对麦拉膜悬臂梁的驱动力为0.2 mN。可以看出,压电纤维复合物的驱动力随基板材料变化而变化,当驱动刚度较大的材料时其驱动力较大,但其顶端位移较小;当驱动刚度较小的材料为基板时,其驱动力较小,但其顶端位移较大。因此,在实际使用过程中,需综合考虑驱动力和驱动位移。
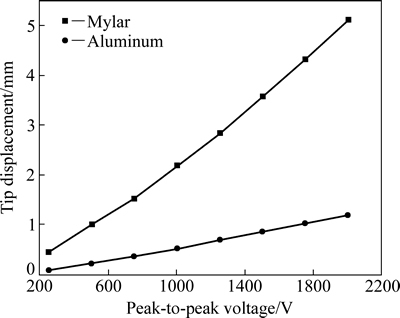
图6 0.1 Hz、500 V时驱动电压大小对Mylar膜与铝板顶端位移的影响
Fig. 6 Effect of actuation voltage amplitude on tip displacement of mylar-based cantilever and aluminum based cantilever at 0.1 Hz and 500 V DC bias
3 结论
1) 利用悬臂梁顶端位移研究压电纤维复合物的驱动性能。不同基板材料的悬臂梁顶端位移随驱动电压变化呈现出闭合迟滞性曲线特征,且迟滞性曲线面积随驱动电压增加而呈非线性增加,压电悬臂梁的顶端位移随驱动电压峰峰值的增加而呈线性增加。
2) 当驱动电压频率较低时,受到非180°电畴运动的影响,压电纤维复合物对铝板及麦拉膜的驱动性能均随着偏置电压的增加而呈降低的趋势,在频率升高时则需综合考虑频率与偏置电压的影响。
3) 对比压电纤维复合物对铝板及麦拉膜的驱动性能表明,压电纤维复合物对刚性结构的驱动力较大而驱动位移较小,而对柔性结构的驱动力较小而驱动位移较大。通过经典的Euler-Bernoulli梁理论计算得出压电纤维复合物对铝板悬臂梁的驱动力为5.2 mN,对麦拉膜悬臂梁的驱动力为0.2 mN。
REFERENCES
[1] 芦 笙, 林萍华, 陈 静, 川岛弘一郎. 声发射在形状记忆合金研究中的应用[J]. 中国有色金属学报, 2001, 11(6): 1002-1008.
LU Sheng, LIN Ping-hua, CHEN Jing, KAWASHIMA K. Application of acoustic emission in research of shape memory alloys[J]. The Chinese Journal of Nonferrous Metals, 2001, 11(6): 1002-1008.
[2] 沈 星, 冯 伟, 李 仁. 具有大驱动位移的复合结构型PZT压电陶瓷[J]. 复合材料学报, 2005, 22(6): 44-48.
SHEN Xing, FENG Wei, LI Ren. Large-displacement PZT piezoelectrics with composite structure[J]. Acta Materiae Compositae Sinica, 2005, 22(6): 44-48.
[3] HAGOOD N W, KINDEL R, GHANDI K, GAUDENZI P. Improving transverse actuation of piezoceramics using interdigitated surface electrodes[C]//Smart Structures and Materials 1993: Smart Structures and Intelligent Systems. Albuquerque: SPIE, 1993: 341-352.
[4] 林秀娟, 张 斗, 张晓泳, 李志友, 周科朝. 基于有限元法压电纤维复合物结构的模拟优化[J]. 中国有色金属学报, 2012, 22(6): 1747-1753.
LIN Xiu-juan, ZHANG Dou, ZHANG Xiao-yong, LI Zhi-you, ZHOU Ke-chao. Modeling and optimization of piezoelectric fiber composites based on finite element method[J]. The Chinese Journal of Nonferrous Metals, 2012, 22(6): 1747-1753.
[5] BILGEN O, KOCHERSBERGER K B, INMAN D J, OHANIAN O J. Novel, bidirectional, variable-camber airfoil via macro-fiber composite actuators[J]. Journal of Aircraft, 2010, 47(1): 303-314.
[6] MING A, HASHIMOTO K, ZHAO W, SHIMOJO M. Fundamental analysis for design and control of soft fish robots using piezoelectric fiber composite[C]//Mechatronics and Automation (ICMA) 2013: IEEE International Conference on. Takamatsu: IEEE, 2013: 219-224.
[7] MING A, PARK S, NAGATA Y, SHIMOJO M. Development of underwater robots using piezoelectric fiber composite[C]// Robotics and Automation 2009: ICRA’09. IEEE International Conference on. Kobe: IEEE, 2009: 3821-3826.
[8] LIN X J, ZHOU K C, ZHANG X Y, ZHANG D. Development, modeling and application of piezoelectric fiber composites[J]. Transactions of Nonferrous Metals Society of China, 2013, 23(1): 98-107.
[9] LIN X J, ZHOU K C, ZHU S, CHEN Z Q, ZHANG D. The electric field, dc bias voltage and frequency dependence of actuation performance of piezoelectric fiber composites[J]. Sensors and Actuators A: Physical, 2013, 203: 304-309.
[10] BOWEN C R, NELSON L J, STEVENS R, CAIN M G, STEWART M. Optimisation of interdigitated electrodes for piezoelectric actuators and active fibre composites[J]. Journal of Electroceramics, 2006, 16(4): 263-269.
[11] BILGEN O, ERTURK A, INMAN D J. Analytical and experimental characterization of macro-fiber composite actuated thin clamped-free unimorph benders[J]. Journal of Vibration and Acoustics, 2010, 132(5): 051005-1-051005-6.
[12] BILGEN O, WANG Y, INMAN D J. Electromechanical comparison of cantilevered beams with multifunctional piezoceramic devices[J]. Mechanical Systems and Signal Processing, 2012, 27: 763-777.
[13] BRADLEY W L, PETER I. A study of substrate materials for use in conjunction with macro fiber composites[C]//54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Boston: AIAA, 2013: 1916-1928.
[14] LACROIX B W, IFJU P G. Investigating potential substrates to maximize out-of-plane deflection of piezoelectric macro-fiber composite actuators[J]. Journal of Intelligent Material Systems and Structures, 2014, 25(8): 1-15.
[15] LIN X J, ZHOU K C, BUTTON T W, ZHANG D. Fabrication, characterization, and modeling of piezoelectric fiber composites[J]. Journal of Applied Physics, 2013, 114(2): 027015.
[16] 崔玉国, 孙宝元, 董维杰, 杨志新. 压电陶瓷执行器迟滞与非线性成因分析[J]. 光学精密工程, 2003, 11(3): 270-275.
CUI Yu-guo, SUN Bao-yuan, DONG Wei-jie, YANG Zhi-xin. Causes for hysteresis and nonlinearity of piezoelectric ceramic actuators[J]. Optics and Precision Engineering, 2003, 11(3): 270-275.
[17] 刘昶. 微机电系统基础[M]. 北京: 机械工业出版社, 2011: 295.
LIU Chang. Foundations of MEMS[M]. Beijing: China Machine Press, 2011: 295.
[18] MASYS A J, REN W, YANG G, MUKHERJEE B K. Piezoelectric strain in lead zirconate titante ceramics as a function of electric field, frequency, and dc bias[J]. Journal of Applied Physics, 2003, 94(2): 1155-1162.
[19] WANG Q M, ZHANG T, CHEN Q, DU X H. Effect of DC bias field on the complex materials coefficients of piezoelectric resonators[J]. Sensors and Actuators A: Physical, 2003, 109(1): 149-155.
[20] GIDDINGS P, BOWEN C R, BUTLER R, KIM H A. Characterisation of actuation properties of piezoelectric bi-stable carbon-fibre laminates[J]. Composites Part A: Applied Science and Manufacturing, 2008, 39(4): 697-703.
[21] KIM J, KANG Y, YUN S. Blocked force measurement of electro-active paper actuator by micro-balance[J]. Sensors and Actuators A: Physical, 2007, 133(2): 401-406.
(编辑 李艳红)
基金项目:国家自然科学基金资助项目(51072235);国家教育部博士点基金资助项目(20110162110044);国防科技工业重点项目(A1420133028)
收稿日期:2014-09-24;修订日期:2015-04-20
通信作者:张 斗,教授,博士;电话:0731 88877196;E mail:dzhang@csu.edu.cn

