DOI: 10.11817/j.issn.1672-7207.2015.08.012
����˫̽�������ֳ�ʽ��������ϵͳ�����ʵ��
���ijɣ����������⣬�����Σ�����
(�人��ѧ ������ϢѧԺ������ �人��430079)
ժҪ����Դ�ͳ�������Dz�ྫ�ȵ͡��ɱ����Լ��ٶ��������⣬���һ�ֻ���˫̽�������ֳ�ʽ�������ǡ��ò����ʹ�÷�����ʵ�ֹ�·��У����Ƽ����·���ź���λת��Ϊ������λ��Ϣ��ֱ����ƽ����ʹ��CORDIC���ּ��㷽�������λ�����Ӧ�û��ڳ���������IJ���ģ���㷨��������룬��3̨˫̽��������Ǻ�2̨K60������Ծ���0.18 mm���в��Ƚ����顣�о�����������봫ͳ�������ȣ���·��У����������·�������ƣ������㷨���٣���ģ����������ž�����������������˲�ྫ�ȺͲ���ٶȡ��� 0~60 m�IJ���ڣ�3̨˫̽��������ǵ�ƽ�����ʱ��С��1.8 s��ƽ���������С��2 mm����������С��1 mm����K60ϵ�в������ȣ�˫̽��������Dz�ྫ�ȺͲ���ٶȶ��нϴ���������֤�˸���Ʒ����Ŀɿ��ԡ�
�ؼ��ʣ��ֳ�ʽ�������ǣ���λ�����������ģ�����������������·��CORDIC�����㷨
��ͼ����ţ�TH761.2 ���ױ�־�룺A ���±�ţ�1672-7207(2015)08-2843-07
System design and implementation for a portable laser rangefinder with dual detectors
ZHAO Wencheng, XU Xianze, LE Yi, LIU Panpan, WANG Xin
(School of Electronic Information, Wuhan University, Wuhan 430079, China)
Abstract: The traditional laser rangefinders have low measurement accuracy, slow speed and high cost. Owing to this, a portable laser rangefinder with dual detectors was designed. Firstly, a beam splitting lens was used to allow the light path to realize internal calibration. And then a phase detecting circuit was designed to produce a DC level, which reflects the value of the signal phase. CORDIC algorithm was adopted to calculate phase. Finally, based on overdetermined linear equations, an algorithm was presented to solve the laser ranging ambiguity. Two K60 laser rangefinder and three proposed rangefinders were experimented on the national standard baseline with the precision of 0.18 mm. The experimental results show that the extra phase-shifting can be removed by internal calibration. The calculation in phase-detection is simple and fast and the search of optimal solution in laser ranging ambiguity can be avoided. The proposed rangefinder has higher measurement accuracy and speed in comparison with the traditional ones. The measurement time is less than 1.8 s, the average measurement error of those three prototypes is less than 2 mm, and the standard deviation is less than 1 mm within the measuring range of 0-60 m. Compared with K60 laser rangefinder, the proposed rangefinders have higher measurement accuracy and speed, which indicates the high reliability of the proposed system design scheme.
Key words: portable laser rangefinder; phase measurement; range ambiguity resolution; beam splitter; phase detecting circuit; CORDIC algorithm
�������������ü���Դ���Ŀ����о���ⶨ��������������������ȣ��������Ǿ��в��ǽӴ������ٿ��Ҳ������ȸߵ��ŵ㡣���������������ǵ�һ����Ҫ��չ��������Ϊһ���ֳ�ʽ�������Ӧ���ڹ��������������У��繤�̽��衢����װ�ꡢ��������Լ���������������[1-4]����һ��չ����Ҫ����������С�ͻ����ͳɱ����������ٻ��Լ��߾��Ȼ��ȷ���չ���ֳ�ʽ��������һ��ѡ����λʽ���ԭ����Ŀǰʹ�ý϶����λ��ⷽ����Ҫ��3�֣�����������������ط��Լ�������ɢ����Ҷ�任(fast fourier transform��FFT[5-6])����������������ʹ�ø�Ƶ������������λ��Ϣ�ĵ�Ƶ�źŲ����������������Ի�����λ���÷�������������Ӧʱ����Ƶ�ʵ��ȶ���Ҫ��ϸߣ��ܷ�ֵ�仯��Ӱ����ྫ�Ȳ��ߣ���ط������У����Dz���Ƶ��Ҫ��Ϊ�ź�Ƶ�ʵ�����������������Ȳ���ʱ���ྫ�������½���FFT�Dz�����ɢ����Ҷ�任���ز��źŵ�ʱ����Ϣת��ΪƵ����Ϣ�������ź���λ�ģ��÷���Ҫ���ź������ڲ�������������Ƶ��й¶������ྫ����������������Ӷ���ߣ����ǹ���IJ��������������ij˼ӷ����㣬��ɼ���Ч���½���Ϊ�˼�˲�����̺Ͳ�ྫ�ȣ��ֳ�ʽ��������ͨ��ʹ�ö���Ƶ����ϲ�ࡣ��ϲ����ھ���ģ����Ŀǰ���еľ����ģ���㷨���ʹ���Ż������㷨[7-8]�����й�ʣ�ඨ������һά�����㷨��Ⱥ�㷨�Լ����������㷨�ȡ����������Ż��㷨һ����Ҫ�Ծ��뼯����������ʱ�ݴ��Բ��㣬�����ڲ����ʵ�־�����ٽ�ģ���������������˲��ʱ�䡣��ˣ�Ѱ�ҳ�һ�ֿ���ȷ����λ��ⷽ���;����ģ���㷨���Ե���Ϊ��Ҫ��Ϊ�ˣ������������Ƴɱ�������ٶ��Լ���ྫ�ȣ������һ�ֻ���˫̽�������ֳ�ʽ�������ǡ��ò���ǹ�ѧϵͳ�����ڹ�·�Խ�������У���Ӷ����������ź��ڵ�·�в����ĸ������ƺͼ�������������˲���ǵļ��ྫ�ȡ������·���ź���λת��Ϊ������λ��Ϣ��ֱ����ƽ����ƽ��������ʹ��������ת���ּ��㷽��(coordinate rotation digital computer��CORDIC)���ɿ���ȷ����ź���λ��Ϊ����߾����ģ���ٶȣ�����˻��ڳ������������λ����ģ���㷨���÷���������ģ������ת��Ϊ����������������⣬ʹ����С���˷�ֱ����������룬�����˶����ž����������������С������ٶȿ졣���3̨���������������2̨K60����ǽ��в��Ƚ����顣
1 ��λ������ģ�ͽ������㷨ʵ��
1.1 ��λʽ������ԭ�����
��λʽ������ԭ���ĺ������ڽ���ʱ��IJ���ת��Ϊ����λ��IJ����������������ʽ���£�
 (1)
(1)
ʽ�У�DΪ������룻cΪ���٣�fΪ���Ʋ���Ƶ�ʣ�tΪ����ʱ�䣻��Ϊ���Ʋ��IJ�����n=0��1��2������Ϊ���Ʋ������������1���������������ڸ�������Ϊ�����������ڵ���λ��ֳ�Ϊ������ ��
��
ʽ(1)�У����Ʋ�����������֪�ģ���ˣ�ֻ��Ҫ����������պ�������n���ɻ�ô������D������������ͨ���Ե����źŲ����ã�������������ģ��ֵ����ˣ�����Ƶ������ô�����룬��Ҫѡȡ������Ʋ�Ƶ�ʱ����ࡣ��k����Ʋ�Ƶ�ʷֱ�Ϊf1��f2������fk����Ӧ�IJ����ֱ�Ϊ��1����2��������k���������ֱ�Ϊ��1����2��������k������ʽ(1)�ֱ��k����Ʋ�Ƶ�ʽ������̣��Ӷ��������ͬ����飺
 (2)
(2)
ʽ�У�n1��n2������nk�ֱ�Ϊk����Ʋ�����������
�÷����鷽�̸���С��δ֪�����������̲��ܱ�ֱ����⡣����Ƕ������IJ�����Χ���ڲ�����Χ��ʹ�������㷨����Ѱ�ҵ������Ψһ�⣬�����������ž���ʱ�������ܴ����ڼ�������ʵ�ֿ��ٲ�ࡣ
1.2 ���ڳ���������ľ����ģ���㷨[9]
��k��Ƶ����fx��fy�IJ�ƵƵ�ʦ�fxy�Dz�ƵƵ������С�ģ����ݲ�Ƶ����ԭ��[10]�������ڲ�ģ�������ϼ�����������Ľ���ֵ��
 (3)
(3)
ʽ�У���x�ͦ�y�ֱ�Ϊ2���źŵ�������
���ڲ����в��ɱ���ػ�������������Ըý��ƾ��뾫�Ȳ��ߣ�������ʹ�øþ�����ⲻͬƵ�ʵ��Ʋ�֮���������֮�ѡȡ����2���źţ�Ƶ�ʷֱ�Ϊfi��fj����ʽ(1)��ʽ(3)���Լ���������֮�

 (4)
(4)
ʽ�У�ni��njΪ���������pijҲӦ���������������ڲ������Ĵ��ڣ����pij��Ϊ����������ڼ���ʱ��Ҫ����ʽȡ������ȡ�����ֵqijΪ
 (5)
(5)
ʽ�У�[*]��ʾ��*ȡ����
��ʽ(4)��ʽ(5)�����Ի��Ƶ��f1������Ƶ�ʵ�������֮�
 (6)
(6)
�����Ϸ������ʵ��任�����뷽����(2)�����Թ������³������Է����飺
 (7)
(7)
���Ϸ�������δ֪��ֻ��2��������ʽ��k�����ǵ��͵ij������Է����飬ʹ����С���˷�[11]���Ի��Ŀ����룺
 (8)
(8)
ʽ�У�
�����Ʋ�Ƶ��ȷ��ʱ������Ҳ�ͱ�ȷ�������ϵ��ai��bi��di�Լ�ei����Ԥ�ȼ���ã����ʱֱ������ֵ���롣���ʱ�������·�����������1����2��������k������ʽ(4)��ʽ(5)�����������֮��q12��q13������q1k������ʽ(8)������ֱ�Ӽ����Ŀ����롣�ý�ģ������������ģ������ת��Ϊ����������������⣬�����˶����ž������������ˣ�������С������ٶȿ졣
2 ˫̽������������ϵͳ���
������λʽ������ԭ������Ҫ�����ͬƵ�ʵ��ƹ����������ͨ�����ڳ���������Ľ�ģ���㷨����Ŀ����롣Ϊ�˼�ⲻͬƵ�ʵ��ƹ�����������ķֱ�Թ�ѧϵͳ��Ӳ����·ϵͳ������ơ�
2.1 ��ѧϵͳ���
����ǹ�ѧϵͳ���ڹ�·��������Ϊ�˽�������У�����������ź��ڵ�·�в����ĸ�����λ�ƺͼ�����������������߲���ǵIJ������ȡ�������ƵĹ�·ϵͳͨ�������������伤���Ϊ2���֣��γ��ڡ����·�����ֱ����䵽2��ѩ������������(APD)[12]�����ѧϵͳԭ��ͼ��ͼ1��ʾ��
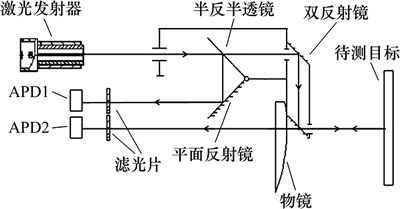
ͼ1 ��ѧϵͳԭ��ͼ
Fig. 1 Principle schematic of optical system
��ͼ1��ʾ��������������е����źŵļ��⾭������������IJ��־�˫���侵2�η�������䵽����Ŀ��ı��棬Ȼ��Ŀ�������������������ᄉ��۵����̽����APD2�ϣ��γ������·������IJ���ֱ�Ӿ�ƽ�淴�侵����ع��̽����APD1�ϣ��γ��ڹ�·���ù�·��Ʋ���Ҫ���巭ת���л������·����˼����˲��ʱ�䡣
����ǵļ��ⷢ��ϵͳѡ�ö��������ȫ��GaAs���������ͺ�ΪQL63D4SC���������ᄉ���Ա�֤����ֱ��������Լ��еĵ��ƹ⡣���̽����APD���ͺ�ΪAD230-8�����������ڽ����ᄉ�Ľ����ϣ���������������ĵ��ƹ⾭�������ᄉ�������ܾۼ���APD�Ĺ������ϣ��Ӷ���ǿ�˹������Ͻ��յ��Ĺ�ǿ����߲���ǵIJ�̡����⣬���÷���ͽ��չ�ѧϵͳ�Ĺ����ƽ�У��Ӷ�����ȵ�����˷���ͽ��չ��źŵ�Ч�ܡ�
2.2 Ӳ��ϵͳ��Ƽ��źŷ���
��������ʵ�ֲ�����Ҫ�����ǻ�ȡ���ƹ����������·��Ҫ���źŽ��е������������ҶԽ�����źŽ��в��࣬��ˣ�������Ƶĵ�·ϵͳ��Ҫ�������Ƶ�·���źŷ�����·���źŵ��Ƶ�·���źŽ����·�Լ������·��5�����֡���·ϵͳ��������ƿ�ͼ��ͼ2��ʾ��
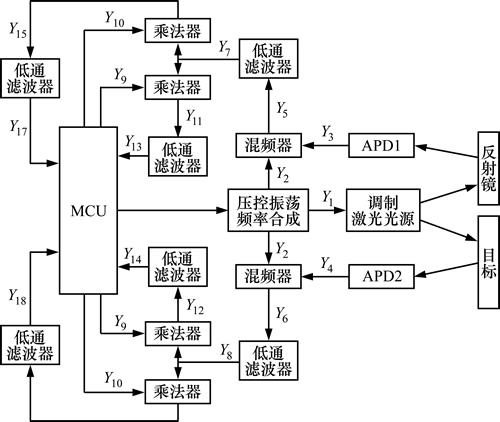
ͼ2 ��·������ƿ�ͼ
Fig. 2 Overall design diagram of circuitry
Ϊ�˱�֤�������ȣ��������ø�Ƶ�źŽ��е��ƣ���ͼ2��ʾ������MCU����ѹ����������3���Ƶ�źţ�����һ���ź�Y1�����Ƶ������Դ������2���ź�(����ΪY2)�ֱ�����Ƶ����Ϊ�˷���������ͳһ�趨�ź�Y*��Ӧ�ķ�ֵΪA*��Ƶ��Ϊf*������λΪ��*����Y1��Y2�ɷֱ��ʾΪ
 (9)
(9)
 (10)
(10)
�ڼ��������Ĺ����У�Y1��������ƣ������ڹ�·̽����APD1���ձ�Ϊ�ź�Y3����Y3Ϊ
 (11)
(11)
ʽ�У� Ϊ��·�����ĸ������ƣ�
Ϊ��·�����ĸ������ƣ� Ϊ�ڹ�·���������ơ�
Ϊ�ڹ�·���������ơ�
Y3��ѹ��������������һ����Ƶ�ź�Y2ͨ����Ƶ����Ƶ�������ź�Y5����Y5ʹ�û����Ͳʽ �ɵ�
 (12)
(12)
ʽ�У�N(t)��ʾ��Ƶ�źţ� ��Ϊ��ƵƵ�ʡ�Y5����ͨ�˲����˲����˳���Ƶ����N(t)��������Ƶ���֣������ź�Y7���Ӷ�����Ƶ�źŵ�������Ч����ֲ����Ƶ�ź��ϣ�
��Ϊ��ƵƵ�ʡ�Y5����ͨ�˲����˲����˳���Ƶ����N(t)��������Ƶ���֣������ź�Y7���Ӷ�����Ƶ�źŵ�������Ч����ֲ����Ƶ�ź��ϣ�
 (13)
(13)
ʽ�У���1Ϊ�˲���ϵ����
��ʱ��MCUͨ����ʱ������2����λ��� ��Ƶ�ʶ�Ϊ
��Ƶ�ʶ�Ϊ �ĵ�Ƶ�źţ�
�ĵ�Ƶ�źţ�
 (14)
(14)
 (15)
(15)
Y7�ֱ���Y9��Y10�����˷�����ˣ������ź�Y11��Y15��ʹ�û����Ͳʽ�ɵã�

 (16)
(16)

 (17)
(17)
ʽ�У�M(t)��ʾ��ֱ���ɷ֣�Y11��Y15������ͨ�˲����˳���ֱ�����֣�ʣ�µ�ֱ���ź�Ϊ
 (18)
(18)
 (19)
(19)
ʽ�У���2Ϊ��ͨ�˲���ϵ����
Y13��Y17��MCU������ã��ٽ�Y17����Y13�õ�
 (20)
(20)
������ͼ2��ʾ��·������ƿ�ͼ�������·�Ļز��źŷ�����һ���ģ��ҵ�·�����ĸ���������ͬ��Y18��Y14��ֱ����ƽ������������ɵ�
 (21)
(21)
ʽ�У���outΪ���·���������ơ�
��ʽ(20)��ʽ(21)�ֱ�ʹ��CORDIC�����㷨�����в��������ʼ��λ��1�͵�·�������Ʀ�noise���������ɻ�����������£�
 (22)
(22)
2.3 CORDIC�����㷨�����λ
CORDIC�㷨[13-14]����ʹ�ó˷�����ֻ��Ҫ1�����ұ������ü���λ��������㼴�ɿ�����ⷴ���С�ͼ3��ʾΪCORDIC�㷨��ԭ��ͼ��
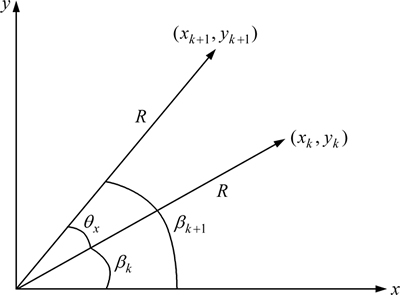
ͼ3 CORDIC�㷨��ԭ��ͼ
Fig. 3 Schematic of CORDIC algorithm
��ͼ3��ʾ����������(xk��yk)��ת��k�ǶȺ�õ�����(xk+1��yk+1)������


 (23)
(23)
ʽ�У�RΪ��ת�뾶��
ͬ���ɵ� ���������ʽΪ
���������ʽΪ
 (24)
(24)
��������MCU�������㣬������ת�Ƕ����㣺
 (25)
(25)
ʽ�У�akΪ��ת�ǵķ���˳ʱ����תʱΪ������ʱ����תʱΪ����
 (26)
(26)
��ʽ(24)��ת��Ϊ
 (27)
(27)
ȥ�� ��Ӱ��ʹxk+1��yk+1�ķ�ֵ�����仯������ת�ǶȲ��䣬�ɵ����µ���ʽ��
��Ӱ��ʹxk+1��yk+1�ķ�ֵ�����仯������ת�ǶȲ��䣬�ɵ����µ���ʽ��
 (28)
(28)
��ʼ����(x0��y0)����m����ת֮��������x���غϣ�������(x0��y0)�ĽǶȦ�0Ϊ��ת�Ƕ��ۻ��ͣ�
 (29)
(29)
ʽ�У���ΪCORDIC �㷨�� ����ʱ����ͨ�����ұ���á���ʽ(22)�������·��λ����Ա�ʾΪ
����ʱ����ͨ�����ұ���á���ʽ(22)�������·��λ����Ա�ʾΪ
 (30)
(30)
CORDIC�㷨��ⷴ����ʱ����ʹ�ó˷�������λ����ͨ�������ã���������ͨ������λʵ�֣���ˣ����Կ��������λ��
3 ʵ����������
��3̨˫̽���������ڹ��ұ������Ͻ��в��Բ�ͨ����λ���Բ��ʱ����в������ñ�����Ϊ�������ߣ�����Ϊ60 m��ƽ�����ȴﵽ0.18 mm������ͨ�����ҹ�����Ǽ�����ļ��(����������ΪNCCSI_110101)��������Ƶ�˫̽����������ǽ���ij���ӹ�˾�����з��IJ���ǣ�Ϊ����֤�����ܣ�ѡ��2̨�ù�˾K60ϵ�м���������֮���бȽϡ�K60�ֳ�ʽ���������ѻ�ù��ҹ�����Ǽ��������֤���������Ϊ58042-44�ţ���2012��ʵ����������������ʱ�����ڹ��ն�����Ϊ2 000 lx���¶�Ϊ 22.8 �棬ѡ��������еİ�ɫ������Ϊ����Ŀ�꣬��ÿ�����Ե�ÿ̨����ǵIJ�������Ϊ100�Σ�ʵ������ƽ�������������Լ����ʱ��ֱ����1~3��ʾ������ǰ2̨���Ի�ΪK60�ֳ�ʽ�������ǣ���3̨��������Ϊ˫̽�����������ǡ�ƽ��������ӳ��ʵ��ֵ����ֵ֮��IJ��죬����������ӳ��ʵ��ֵ֮�����ɢ�̶ȣ����������궨����ǵ��ظ��ȡ�
��1~3�У�ƽ���������Ͳ�����ļ��㹫ʽ�ֱ�Ϊ
 (31)
(31)
 (32)
(32)
ʽ�У���Ϊƽ��������DgΪ��g��ʵ����룻D0Ϊ������ֵ����Ϊ�����
2�ֲ���Dz��Բ����Ƚ���ͼ4��ʾ����ͼ4��֪��2�ֲ���ǵ�ƽ��������С��2 mm����˫̽�����������K60�������ȣ���ྫ���нϴ���ߡ��Ƚ�2�ֲ���ǵIJ������Ȼ˫̽�����IJ������K60�������߲����ԣ��������������ڵIJ����������1 mm���ڣ���ӳ����ܺõIJ���ظ��ȡ������������·�ز���ǿ���ᄉ�����Ӱ�죬��Զ�뽹ƽ���λ�ã��ز���ǿƫ����Ϊ�˱�֤�������ȣ���Ҫ�ɼ�������λ���ڼ��㣬��˲���ٶȻ�����Ŀ��λ���뽹ƽ�������������Ӧ���ͣ���ͼ4��ʾ�����ʱ�������뽹ƽ���������������ߡ�Ȼ����K60�������ȣ�˫̽��������ڲ���ٶ������˽ϴ���ߣ�ƽ�����ʱ��С��1.8 s��ʵ����������������Ƶ�˫̽�����������ǵIJ�ྫ�ȺͲ���ٶȶ����˽ϴ���ߡ�
��1 ��������ƽ���������
Table 1 Average measurement error of prototypes mm
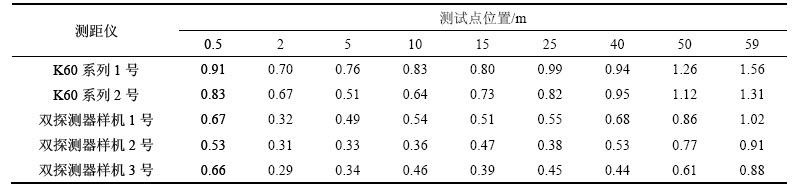
��2 �������߲�����
Table 2 Range standard deviation of prototypes mm
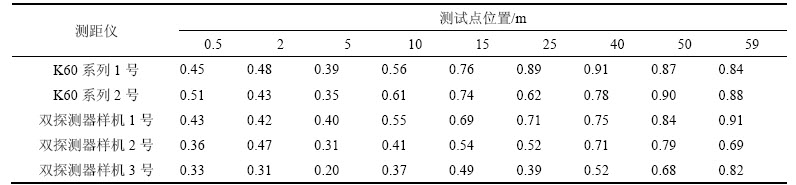
��3 ��������ƽ�����ʱ��
Table 3 Average range time of prototypes s

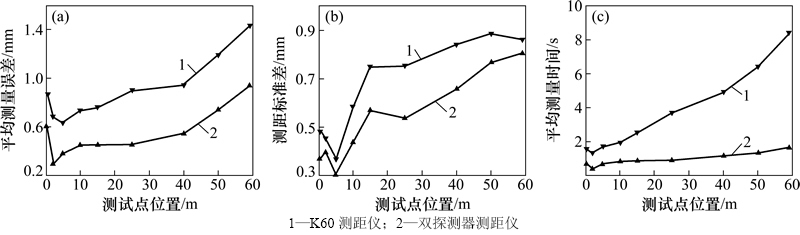
ͼ4 2�ֲ����ƽ�����Բ����Ƚ�
Fig. 4 Comparison of average testing parameters between those two types of rangefinders
4 ����
1) �����Ƴɱ�������ٶ��Լ���ྫ�ȣ��о���һ�ֻ���˫̽�������ֳ�ʽ�������ǡ�ʹ���˷�����ʵ�ֹ�·��У��������·�еĸ������ƣ�����˼����·���ź���λת��Ϊ������λ��Ϣ��ֱ����ƽ����ʹ��CORDIC���ּ��㷽�����������λ����Ӧ�û��ڳ���������IJ���ģ���㷨����Ҫ����ֱ������������롣
2) ����������������0~60 m�IJ���ڣ���˫̽��������Dz������С��2 mm�����ʱ��С��1.8 s�����ֳ�ʽ����ǵIJ�ྫ�ȺͲ���ٶȽ�K60����Ƕ����˽ϴ���ߡ���ϵͳʵ�ַ������ڲ���״�ϵͳ�Լ��������ϵͳͬ������һ���IJο���ֵ��
�ο����ף�
[1] Pinto A M, Rocha L F, Moreira A P. Object recognition using laser range finder and machine learning techniques[J]. Robotics and Computer-Integrated Manufacturing, 2013, 29(1): 12-22.
[2] Park H S, Son S, Choi S W, et al. Wireless laser range finder system for vertical displacement monitoring of mega-trusses during construction[J]. Sensors, 2013, 13(5): 5796-5813.
[3] Chung W, Kim H, Yoo Y, et al. The Detection and following of human legs through inductive approaches for a mobile robot with a single laser range finder[J]. IEEE Transactions on Industrial Electronics, 2012, 59(8): 3156-3166.
[4] ������, ��С��, ���, ��. �ƶ������˷ֲ�ʽ����ϵͳ�����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2005, 36(5): 727-732.
CAI Zixing, ZOU Xiaobing, WANG Lu, et al. Design of distributed control system for mobile robot[J]. Journal of Central South University (Science and Technology), 2005, 36(5): 727-732.
[5] Guan X, Fei Y S, Lin H. Hierarchical design of an application-specific instruction set processor for high-throughput and scalable FFT processing[J]. IEEE Transactions on Very Large Scale Integration (VLSI) Systems, 2012, 20(3): 551-563.
[6] Jo B G, Sunwoo M H. New continuous-flow mixed-radix (CFMR) FFT processor using novel in-place strategy[J]. IEEE Transactions on Circuits and Systems-I: Regular Papers, 2005, 52(5): 911-919.
[7] �����. �������������㷨�Ľ����ģ���㷨[J]. ϵͳ��������Ӽ���, 2011, 33(3): 557-561.
LI Junxia. Resolution method of range ambiguity based on three-step-search algorithm[J]. Systems Engineering and Electronics, 2011, 33(3): 557-561.
[8] ��, ���, �ʸ���. ����״�����ģ�������ֿ����㷨[J]. ��������Ϣѧ��, 2001, 23(9): 905-911.
XU Bangjian, LI Gang, HUANGFU Kan. Two fast algorithms of de-ambiguous technique in ranging radar[J]. Journal of Electronic & Information Technology, 2001, 23(9): 905-911.
[9] ����, ������, ���ұ�, ��. ���ڳ������������λ�������ģ���㷨[J]. �����DZ�ѧ��, 2012, 33(4): 930-935.
LE Yi, XU Xianze, LI Zhongbing, et al. Resolution method of laser ranging ambiguity based on overdetermined equations[J]. Chinese Journal of Scientific Instrument, 2012, 33(4): 930-935.
[10] ��ѡ��, �����t, ������. ��λʽ�����������������ƫ�Ľ�[J]. ��ѧ���ܹ���, 2012,20(4): 887-894.
WANG Xuangang, GOU Ningyi, ZHANG Keshu. Unbiased improvement 0f spectrum analysis phase pulse-drive current for laser range finder[J]. Optics and Precision Engineering, 2012, 20(4): 887-894.
[11] Ϳ����, ����, ������, ��. ͬ�ᾶ���ȹܴ�������ʵ���о�[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(4): 1145-1149.
TU Fubing, XU Xin, ZHOU Jiemin, et al. Experimental study on heat transfer characteristics of coaxial and radial heat pipe[J]. Journal of Central South University (Science and Technology), 2011, 42(4): 1145-1149.
[12] Tan Y C, Chandrasekara R, Cheng C, et al. Silicon avalanche photodiode operation and lifetime analysis for small satellites[J]. Optics Express, 2013, 21(14): 16946-16954.
[13] Sung T Y, Hsin H C. Design and simulation of reusable IP CORDIC core for special-purpose processors[J]. Computers & Digital Techniques, IET, 2007, 1(5): 581-589.
[14] JUANG Tsobing, HSIAO Shenfu, TSAI Mingyu. Para-CORDIC: Paraller CORDIC rotation algorithm[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2004, 51(8): 1515-1524.
(�༭ �Կ�)
�ո����ڣ�2014-08-10�������ڣ�2014-10-26
������Ŀ(Foundation item)�������ص�����о���չ�ƻ�(973�ƻ�)��Ŀ(2011CB707904)���人�пƼ���Ӧ�û����о��ƻ���Ŀ(2013010501010121)(Project (2011CB707904) supported by the National Basic Research Development Program (973 Program) of China; Project (2013010501010121) supported by the Applied Basic Research Program of Wuhan Municipal Science and Technology Bureau)
ͨ�����ߣ�������ʿ�����ڣ���ʿ����ʦ�����¾�����������е��������������о���E-mail��xuxianze@whu.edu.cn

