基于改进混沌优化算法的智能风面控制系统
李秉杰1, 2,刘冀伟1,赵家弘1,吕逸良1
(1. 北京科技大学 自动化学院,北京,100083;2. 民政部一零一研究所,北京,100070)
摘要:根据风面控制系统的时滞与不确定等特性,采用改进混沌优化算法与智能PID控制算法,设计并实现一个实用的智能风面控制系统。先通过智能PID控制算法较精确地控制风机输出风速,并再在此基础上引入曲度的概念来描述风道内风面的弯曲程度,通过改进混沌优化算法在输出风速的邻域内搜索最佳曲度来优化输出风速,实现风面的均匀性控制。现场应用结果表明,该算法具有较好的鲁棒性和抗干扰能力。
关键词:混沌优化算法;风面控制;风机控制;智能PID控制
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2011)S1-1009-06
Intelligent air speed plane control system based on improved chaos optimization algorithm
LI Bing-jie1, 2, LIU Ji-wei1, ZHAO Jia-hong1, L? Yi-liang1
(1. School of Automation, University of Science and Technology Beijing, Beijing 100083, China;
2. 101 Institute, Ministry of Civil Affairs of the People’s Republic of China, Beijing 100070, China)
Abstract: According to the characteristics, such as delay and uncertainty, of air speed plane control system, the improved chaos optimization algorithm and intelligent PID control algorithm were adopted to design and achieve a practical intelligent air speed plane control system. Firstly, by using intelligent PID control algorithm, the output speed of the fan could be relatively precisely controlled. Then, based on these results, the concept of curvature was introduced to describe the curvature of the air speed plane in the duct. And by making use of the improved chaos optimization algorithm, better curvature could be found in the neighbourhood of the output speed to optimize it. So, the homogeneity control of the air speed plane could be implemented. It is demonstrated by the field application results that the algorithm has good robustness and anti-interference ability.
Key words: chaos optimization algorithm; air speed plane control; fan control; intelligent PID control
现代社会人们越来越希望通过人力改变身边的生存环境,适宜的气候、洁净清新的空气成为人们不懈追求的目标。因此,空调和空气净化装置等系统的研发与应用一直备受关注,其市场需求仍在不断提高。在此类系统研发过程中,内部空气流速的控制是首要解决的关键性技术。前人的研究成果主要聚焦于平均风速控制,其中李尹[1]将基于传统PID算法的风机控制作了较系统的总结,李可等[2]设计了专家-模糊PID控制算法,引入智能控制并加以创新,但都未考虑空间风速分布。在优化算法方面,杨丹等[3]设计一种全局搜索算法,应用于图像分割,张永杰等[4]针对相控阵雷达,设计了能够同时多区域优化搜索的算法等。
但是,对于空气净化消毒装置等一些系统,要求气体流通面相对均匀稳定,这在前人的研究成果中并不多见。同时,优化搜索算法主要应用于图像处理和模式识别等领域,尚未涉及风面均匀性控制。且由于混沌运动具有遍历性和伪随机性等特点,使得它和优化搜索算法产生某些契合点。此外,在风力发电和航空航天等研究领域,风面分布不均都会使系统性能严重下降。由此可见,风面均匀性控制问题尚未引起广泛重视,需亟待解决。
基于以上考虑,本文作者提出基于改进混沌优化算法的智能风面控制系统。通过在现场系统中进行调试并结合计算机仿真,分析算法的各项性能,以期得到性能满意的系统。
1 系统原理分析与方案设计
1.1 系统模型建立与分析
以现场空气净化消毒系统中的风面控制为例,设计系统模型框图如图1所示。系统主要设计思想是设计模糊自适应PID控制器,对风机风速进行初步控制,再经过混沌优化算法在此时风机风速的一个微小邻域内搜索弯曲程度更小风面对应的风速,并将此风速反馈,修正给定风速。由于是在微小邻域内搜索,故既能改善风面分布,又不致引起不必要的噪音和系统超调。需要注意的是,混沌优化搜索算法只在风速稳定后执行,故在反馈过程中附加软件开关环节,以判断模糊自适应PID控制器是否已将风速控制稳定。
在系统风道中,空气受到多层模块和风道内壁阻挡,根据流体力学理论,空气在风道内的流动将包含层流和湍流两种形式[5]。经实验测定,光催化净化效果在风速为0.8 m/s左右时达到最佳,如图2所示[6]。所以,如只控制平均风速,风道内将只有很窄的范围风速为平均风速,致使整个系统性能受到严重影响。因此,考虑测量多点风速并拟合出风速曲线,即“风面”,进而设计更加完善的控制算法对空间风速进行控制,以期得到更加均匀平整的风面。
为描述“风面”的均匀程度,引入“曲度”的概念。这里考虑对风道水平截面一个维度进行风速测量估计整个面的风速分布。则“曲度”可定义为拟合后风面曲线函数的方差,即

 (1)
(1)
式中:v(x)为用最小二乘法拟合出来的“风面”曲线方程;x为风道内水平截面上任一条线的位置坐标;E(v)为“风面”曲线函数的期望,即
 (2)
(2)
综上所述,风面控制问题即转换为在给定风速的邻域内搜索最小曲度的系统优化问题。
1.2 基于Arnold混沌系统的混沌优化算法研究
利用混沌序列的遍历性和伪随机性进行优化搜索。选择Arnold猫映射,其方程如下[7]:
 (3)
(3)
式中:系统参数k一般取2,“mod1”表示只取小数部分,因此,二维相空间被限制在正方形[0, 1]×[0, 1]内,Arnold映射是一个保面积映射(没有吸引子),同时也是一一映射。混沌系统选好后,把混沌运动的遍历“放大”到实际系统优化变量的取值范围,利用混沌变量进行优化搜索。最后经过若干步搜索,当得到的可行解满足终止判据时,则视其为最优解。

图1 智能风面控制系统框图
Fig.1 System block diagram of intelligent air speed plane control system
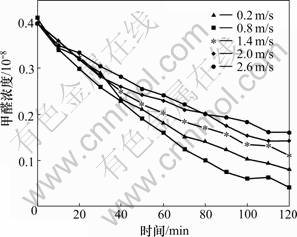
图2 25 ℃时光催化效果与风速关系示意图
Fig.2 Relationship diagram between photocatalytic effect and wind speed at 25 ℃
由于混沌优化算法对某些状态的搜索时间较长,且在混沌运动开始阶段,随机性尚未达到满意程度,故这里将其改进。取定系统初值后先迭代n次后再用于载波。在进行优化搜索时,先在全局搜索中找到一个最优解的近似值,然后在此近似值的邻域内进行二次搜索,这样减少了很多冗余的搜索过程。实践证明,引入n次迭代和二次搜索的算法大大提高了搜索速度。
1.3 基于智能控制理论的改进PID控制算法研究
系统风道内的风速控制系统是一个高延时大惯性系统,固定参数的PID控制环节很难满足其动态特性要求。而模糊控制通过对模糊规则的判断进行模糊推理,具有较好的鲁棒性与动态特性,但由于量化等级受到限制,其稳态精度不尽如人意。因此,将二者结合,设计一种模糊自适应PID控制算法,同时满足系统的稳定性和动态性能要求。具体方案设计如下:在普通PID控制器的基础上增加二维模糊推理控制器,以偏差e及偏差变化率ec为输入,以PID控制器的3个参数kp、ki和kd作为输出,使得在e与ec变化的同时,在线调整PID的3个参数,满足不同的e与ec对参数的不同要求,其结构如图3所示。
2 系统算法研究与软件设计
2.1 改进混沌优化算法研究与设计
令一类连续对象的优化问题为下式所述:
min f(xi) (i=1, …, n; a≤xi≤b) (4)

图3 模糊自适应PID控制系统结构图
Fig.3 Fuzzy adaptive PID control system structure
则基于Arnold猫映射,根据改进混沌优化算法,其软件设计步骤描述如下。
Step 1:混沌系统初始化。取式(3)中的k为2,对系统进行迭代,迭代n次后(n取2 000),得到1对伪随机性足够好的混沌序列,任选其中1列,按序挑选i个混沌变量xi,n。
Step 2:通过式(5)计算,用载波的方法将混沌变量“放大”到优化变量的取值范围。
 (5)
(5)
由于本系统风道内水平截面长度为50 cm,取c=0, d=50。
Step 3:用混沌变量 进行迭代搜索。设最优解x*=xi(0),最优性能指标f *=f (0),令迭代步数k=1,且
进行迭代搜索。设最优解x*=xi(0),最优性能指标f *=f (0),令迭代步数k=1,且 ,计算相应性能指标fi(k)。
,计算相应性能指标fi(k)。
if  , then
, then ,
,
else if  , then放弃
, then放弃 ,
,
Step 4:若连续经过若干步搜索f *均保持不变,则将此时的x*视为最优解的近似值。然后进行二次载波,按式(6)取x*附近的一个微小邻域:

其中: 是调节常数,它将Step 1中产生的混沌变量按比例“缩小”并引入当前最优解x*中。若不满足f *多步搜索保持不变,则返回Step 3继续进行1次搜索。
是调节常数,它将Step 1中产生的混沌变量按比例“缩小”并引入当前最优解x*中。若不满足f *多步搜索保持不变,则返回Step 3继续进行1次搜索。
Step 5: 用继续迭代搜索。取迭代步数k′=1,令
用继续迭代搜索。取迭代步数k′=1,令 ,计算对应的fi(k′)。
,计算对应的fi(k′)。
if  ,then
,then ,
,
else if  ,then放弃
,then放弃 ,
,
Step 6:搜索直到满足系统终止判据为止,此时的x*和f *即为系统最优解和最优性能。若不满足判据,则返回Step 5继续搜索。
2.2 模糊自适应PID控制算法研究与设计
由于二维模糊推理控制器的输入输出都是语言变量,所以要把e,ec,kp,ki和kd等控制参数进行语言值划分,考虑系统复杂程度及一些精度要求,这里把各参数均分为5个语言值:{NB, NS, ZO, PS, PB},它们分别代表负大、负小、零、正小和正大[8]。
比例环节可加快系统响应速度,但往往会导致较大超调,于是在偏差e或偏差变化率ec较大时,也将kp取大,以加快响应速度;当偏差e或偏差变化率ec较小时,适当减小kp,使系统稳态性能良好。积分环节可使系统稳定,但也会延长调节时间,所以,在偏差e较大时减小ki,偏差e较小时适当提高ki;当偏差变化率ec较大时,加大ki以减缓偏差变化趋势,当ec较小时,减小ki以使系统响应有足够的变化空间,减少震荡次数。微分环节具有预测变化的功能,当偏差e较大时先不引入微分环节,只在系统开始震荡时引入,减小调节时间。
综合以上考虑,设计的模糊自适应PID控制器模糊规则表如表1所示。其中第2到6列为kp参数模糊表,第7到11列为ki参数模糊表,第12到16列为kd参数模糊表。
通过模糊矩阵表以及kp,ki和kd的隶属函数定义便可以计算出不同e与ec组合情况下的PID参数取值,使得系统具有良好的稳态性能和动态性能。
2.3 风面均匀性控制系统算法研究与设计
首先在系统风道截面内安放9个风速探头,根据系统给定利用模糊自适应PID控制算法将系统风道内平均风速较精确地控制为给定风速,计算此时风机输出在测量点平面的实际平均风速,并拟合出风面曲线v(x)。最后利用混沌优化搜索算法在此时近似最优解的微小邻域内搜索全局最优解,最终得到系统给定风速附近的最佳风面,以实现风面的均匀性控制。
这里将系统风速给定值定为800 mm/s,混沌优化搜索算法优化变量的取值范围为[600, 1 000] (mm/s),即在经过智能PID控制后的输出风速±200 mm/s的邻域内搜索全局最优解。而模糊自适应PID控制算法中模糊集的论域为:e, ec={-500, -300, -100, 0, 100, 300, 500} (mm/s),kp={20, 40, 50, 60, 80},ki={1, 3, 5, 7, 9},kd={0, 3, 8, 10, 12},设它们都服从正态分布,且模糊子集均为{NB, NS, ZO, PS, PB},则可得出各参数模糊子集的隶属度,根据以上控制模型即可引入人脑实际经验在线自动修正PID参数,实现系统的智能控制。
3 系统实现与性能分析
3.1 系统仿真与硬件实现
将算法通过嵌入式C语言在纳米光催化空气净化消毒系统平台上编写,上位机采用ARM-Cortex内核的LM3S8962芯片,下位机采用C8051F410多路A/D采样单片机,将单片机A/D模块采集到的传感器数据经过处理通过I2C总线发送给上位机,由上位机发送控制指令及在触摸屏上显示,并将数据存入优盘。数据分析采用Matlab R2010a仿真软件,通过PC机使数据更加直观,便于分析系统性能。
3.2 混沌序列遍历性、伪随机性分析
为验证混沌优化搜索算法可以遍历优化变量的取值区间,且能够搜索到全局最优解,对Arnold混沌系统的混沌特性进行分析。首先赋系统初值(1,1),在迭代2 000次后再迭代20 000次,序列随迭代次数k的变化在坐标系中的所有取值如图4所示。经测试表明此系统可以通过迭代及“放大”遍历优化变量的取值范围,并能产生分布均匀、伪随机性良好的混沌序列。
3.3 智能风面均匀性控制算法性能分析
在另一套系统平台上采用传统PID控制算法,得到的风道一维风面曲线对比如图5所示。从图5中可以看出:2条曲线均以风速给定值800 mm/s为参考上下波动。由于现场风机左边安装了固定支架,进风受
到影响,故右侧风速会更大。最右端曲线的上升趋势由风道内壁导致的边缘效应产生,此区域湍流形式最多,附近风面最难控制。通过设计智能风面控制系统对风面进行控制,可以看出风面曲线趋于平缓,这使得系统净化消毒整体性能大幅度提高。
表1 模糊自适应PID控制器参数模糊规则表
Table 1 Fuzzy rule table of fuzzy adaptive PID controller parameters
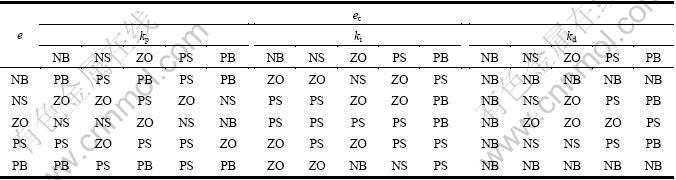

图4 Arnold混沌系统两序列取值示意图
Fig.4 Values ??diagram of two sequences of Arnold chaos system
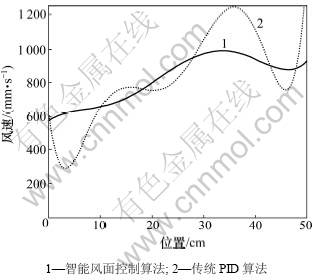
图5 应用不同算法风面均匀性对比图
Fig.5 Comparison chart of air speed plane uniformity by applying different algorithms
4 结论
充分利用Arnold猫映射的遍历性和伪随机性,设计了基于改进混沌优化算法的智能风面控制系统。经过在现场应用于预先设计好的基于ARM-Cortex和C8051F控制芯片的纳米光催化空气净化消毒系统,使系统整体性能在人感知不到的情况下得到提升。经过在工业现场3 d的设备老化,系统未出现任何软硬件问题,其鲁棒性、抗干扰能力得到保障。
基于改进混沌优化算法的智能风速控制系统具有相当广阔的研究与应用前景,其风面控制可扩展为二维风面,即通过对多点测量风速拟合出二维曲面,得到完整的水平截面风速场,智能PID算法中的模糊规则表也可继续修正完善,这将使得风面均匀性、控制性能愈加完善。
参考文献:
[1] 李尹. PID控制算法及其在风速控制中的应用PID面控制算法;[D]. 武汉: 华中科技大学, 2007.
LI Yin. PID control arithmetic and its application in wind-speed control[D]. Wuhan: Huazhong University of Science and Technology, 2007.
[2] 李可, 刘旺开, 王浚. 专家―模糊PID在低速风洞风速控制系统中的应用[J]. 北京航空航天大学学报, 2007, 33(12): 1387-1390.
LI Ke, LIU Wang-kai, WANG Jun. Parameters self-tuning fuzzy-PID combined with expert control on wind velocity control system of wind tunnels at home[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(12): 1387-1390.
[3] 杨丹, 翟中. 基于全局优化搜索算法的图像分割研究[J]. 计算机科学, 2009, 36(7): 278-280.
YANG Dan, ZHAI Zhong. Research of imagesegmentation algorithmbased on search algorithm for global optimization[J]. Computer Science, 2009, 36(7): 278-280.
[4] 张永杰, 李少洪, 朱海冰. 多功能相控阵雷达优化搜索建模与仿真研究[J]. 系统仿真学报, 2008, 20(16): 4248-4251.
ZHANG Yong-jie, LI Shao-hong, ZHU Hai-bing. Research on modeling and simulation of optimal search of multifunction phased array radar[J]. Journal of System Simulation, 2008, 20(16): 4248-4251.
[5] 林建忠, 阮晓东, 陈邦国, 等. 流体力学[M]. 北京: 清华大学出版社, 2005: 9.
LIN Jian-zhong, RUAN Xiao-dong, CHEN Bang-guo, et al. Hydromechanics[M]. Beijing: Tsinghua University Press, 2005: 9.
[6] 赵丽宁, 黄翔, 狄育慧. 负载纳米TiO2的ACF滤料的空气净化性能[J]. 西安工程科技学院学报, 2006(4): 437-439.
ZHAO Li-ning, HUANG Xiang, DI Yu-hui. Analysis of decontaminating air by ACF material with nanometer TiO2[J]. Journal of Xi’an University of Engineering Science and Technology, 2006(4): 437-439.
[7] Chou J, Ramchandrad K, Ortega A. Next generation techniques for robust and imperceptible audio data hiding[C]//Proceedings of IEEE International Conference on Acoustics, Speech and Signal Processing. Piscataway, NJ, USA, 2001: 1349-1352.
[8] 唐赓, 王岩. 模糊自适应PID控制在Nd:YAG晶体等径生长中的应用[J]. 陕西国防工业职业技术学院学报, 2005(1): 27-32.
TANG Geng, WANG Yan. Application of fuzzy-adaptive PID control in the equal-diameter growth of Nd:YAG[J]. Journal of Shanxi Institute of Technology, 2005(1): 27-32.
(编辑 李艳红)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:中央级科学事业单位修缮购置专项资金2010年度科学仪器设备改造升级技术开发项目(1181011007)
通信作者:赵家弘(1986-),男,吉林省吉林市人,硕士,从事嵌入式系统理论研究与应用;电话:13466324540;E-mail:zhaojiahong345@163.com

