������ģ�������������ܱƽ��Լ���ƽ�����
����ǿ1,2��������2���ָ�2
(1. ����ʦ��ѧԺ �����������Ϣ��ѧϵ, ���� ���� 421008��
2. ���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ, ���� ��ɳ 410083)
ժҪ��ͨ��һ���������������ʵʱ�ص�����������ģ���������������ٳ�ʼ��������������������Ƶ���Ч����߿��ƾ��ȡ����ȣ�֤������ģ���������ıƽ������������ԣ��Ӷ�֤����������ʱ������һ�����ܱƽ����������������⾫�ȱƽ������ϵ����������ʵ��������ָ������һ�ֶ����ȵıƽ�������Ԥ�����������£���������Ϊ�ƽ����ij�����������ͨ��1����ֵʵ����֤������ģ���������ƽ������Ժ�����ʵ��Ч�����о�����������ƽ�������ȫ���������Ҫ����Գ���ģ����������������ģ���������ıƽ��������87.4%��
�ؼ��ʣ�ģ�������������������ܱƽ�������ֱƽ�����
��ͼ����ţ�TP13 ���ױ�־�룺A ���±�ţ�1672-7207(2012)08-3046-07
Universal approximation properties of fuzzy controllers with variable universe of discourse and their approximation conditions
LONG Zu-qiang1,2, LIANG Xi-ming2, YAN Gang2
(1. Department of Physics and Electronics Information Science, Hengyang Normal University, Hengyang 421008, China;
2. School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: By tuning universe of discourse online using a set of contraction-expansion nonlinear factors, the amount of initial rules was reduced greatly on fuzzy controllers with variable universe of discourse, and the control accuracy was improved significantly at the control points of expectation. First, the approximation error of these fuzzy controllers was proved to be convergent, which suggested that they were universal approximators in the whole time domain. At the same time, they were pointed out to be approximators with second order accuracy. Next, a sufficient condition was given to use these fuzzy controllers as approximators under the prearranged accuracy. Finally, a numerical example was also given to illustrate the real effect of these fuzzy controllers on the approximation of nonlinear functions. The results show that the given requirements are met fully, and that fuzzy controllers based on variable universe of discourse increases by 87.4%, compared with conventional fuzzy controllers on approximation accuracy.
Key words: fuzzy controllers; variable universe of discourse; universal approximators; sufficient approximation condition
�����ģ��������ʱ��������2�����⣬����λ������Ŀ��ƾ��Ⱥ���μ��ٹ�����Ŀ�Խ��Ϳ����㷨�ĸ����ԡ�����ģ�����������Ȳ��ߵ���Ҫԭ����ȱ�����ֻ��ں����������ޡ�Ϊ�ˣ��ܶ��о������һЩ��Ӧ�Ľ�����������У�������ģ�����Ʒ�����������һ�ַdz���Ч�ķ����������[1]���ģ����������ʽ���������ģ������˼�룬���������������뵥�������������Ӧģ�������㷨��˫���뵥�������������Ӧģ�������㷨[2-3]����ν������ģ��������������ͨ��һ������������������ߵص�������ʹ�������������Ƶ㸽����÷dz���ϸ��һ������Ӧģ����������Li��[4]�����ַ����ֱ�ȡ��4�������ڷ�����Ƶijɹ�����ȡ��ʵ����Ƶijɹ�����ýϺõĿ���Ч����4�������������繫�ϵĿ������⣬���о��ɹ��õ����ƽ�Ĺ㷺��ע��ʵ��֤����ģ��������������ѵ���Ҫ���ڻ�ȡһ����������⡣���淽��һ����ͨ��ѯ���о���IJ����������ר����ʵ�֡�Ȼ���������[1-2]��Ϊ��������ģ��������ʹ�ü����ּ��ɴﵽ�߾��ȵĿ���Ч��(���绮��Ϊ2~3ģ����)��������Ҫ����������ר��֪ʶ��ֻ��Ҫ֪��ģ������Ĵ��±仯���Ƽ��ɡ���ˣ����ֿ������ȿɱ��������鷳��ѯ�ʹ������ֿɴ����������������������ڱ�����ģ������������ʹ�ü����ֵ�ԭ�������[1-2]��Ҫ�Ǵӷ����ĽǶȽ��������ۣ�����û�о����ϸ����ѧ֤������ˣ�һЩѧ�߶����ֿ��������ŵ㻹���ڻ��ɡ�������֪��BP������֮���Ի�ù㷺Ӧ�ã������ԭ��������о���֤��BP���������ܱƽ�������������Ͻ�����Ƕ�BP����ƽ������Ļ��ɡ��ܴ�������ģ��ϵͳ���о���Ҳ���ⷽ��������о�����ȡ��һЩ�ɹ������磬Wang��[5-11]�о���������ģ��ϵͳ�ıƽ����ʡ�ģ����������һ�ֳ�����ģ��ϵͳ����ģ���������������ܱƽ��ԣ������������⾫�ȱƽ����������ʵ����������Ŀ�꺯���������ſ������Ŀ����ɣ���ģ�����������дﵽ���ſ�������������Ying��[12-17]����һЩģ���ƽ����ıƽ�������Ϊ����Ļ����ṩһЩ������������ǣ�������Щ�о��ɹ�������Ծ�̬����ģ��ϵͳ�ģ��������ڶ�̬ģ��ϵͳ��������ģ����������Ϊһ�ֶ�̬����ģ��ϵͳ���б�Ҫ�����������ܱƽ��ԣ����������ֵķ������Ա�Ϊ��ƹ����ṩ�������ݡ�
1 ������ģ���������Ľṹ
��ģ���������IJ�����k=0��1��2��������k�������������Ϊ �����������Ϊyk�����������Ϊ
�����������Ϊyk�����������Ϊ ����������Ϊ
����������Ϊ ������U0Ϊ��ʼ��������V0Ϊ��ʼ�����������ģ����������£�
������U0Ϊ��ʼ��������V0Ϊ��ʼ�����������ģ����������£�
R(j)����x1ΪA1j��x2ΪA2j�� ��xnjΪAnj����yΪBj(j=1��2������m)
��xnjΪAnj����yΪBj(j=1��2������m)
��kʱ�̵�ģ����Aij��Ϊ (i=1��2������n)��kʱ�̵�ģ����Bj��Ϊ
(i=1��2������n)��kʱ�̵�ģ����Bj��Ϊ ���������� [18]�������õ�ֵģ�������˻�����������ƽ����ģ��������ģ��������:
���������� [18]�������õ�ֵģ�������˻�����������ƽ����ģ��������ģ��������:  �ɱ�ʾΪ��
�ɱ�ʾΪ��
 (1)
(1)
���У� Ϊģ�����ϵ������������Ⱥ�����
Ϊģ�����ϵ������������Ⱥ����� Ϊ������(��
Ϊ������(�� ȡ���ֵ�Ķ�Ӧ��)�����⣬��������
ȡ���ֵ�Ķ�Ӧ��)�����⣬�������� ���������Vk�ֱ�ȡΪ��
���������Vk�ֱ�ȡΪ��
 (2)
(2)
 (3)
(3)
���У�Ei��Y��Ϊ�������� ��
�� �ֱ�Ϊ������Vk�ϵ��������ӡ����ȷ����������[1-2]���ڱ����У���ȡ������ʽ��
�ֱ�Ϊ������Vk�ϵ��������ӡ����ȷ����������[1-2]���ڱ����У���ȡ������ʽ��
 (4)
(4)
 (5)
(5)
���У�0���ӣ�1����Ϊ���С�����������æҵ�Ŀ���DZ�֤ �ij���������(��Ϊ
�ij���������(��Ϊ ��yk���п���Ϊ0)��ͨ�������ã��������������ļ�С��������������������͡����ֱ仯������ͼ1��ʾ����Ȼ���������Vk�����yk�ļ�С�������������Ӧ�ص����������͡�
��yk���п���Ϊ0)��ͨ�������ã��������������ļ�С��������������������͡����ֱ仯������ͼ1��ʾ����Ȼ���������Vk�����yk�ļ�С�������������Ӧ�ص����������͡�
��kʱ�̣���ʽ(2)��(4)��֪��
 (6)
(6)
���ǣ� ���ʿɵã�
���ʿɵã�
 (7)
(7)

ͼ1 �����ѹ��������
Fig. 1 Contraction and expansion of universe
��ΪΪ�����ģ����ԣ�
 (8)
(8)
��ʽ(7)��(8)����(1)ʽ���������ģ���������ɱ���Ϊ��
 (9)
(9)
��ͼ1�У�����Сʱ���ض���խ����Ϊ�ϵ�ģ�����ϸ���m���ֲ��䣬���ԣ�����״Ҳ�ض���խ�����ֱ仯������ͼ1��ʾ������൱����=0 (������)������ģ�����ֱ���ܼ���Ȼ�����ܹ�����N=m��n���ֲ��䡣������ͬ��Ĺ���������һ����С (�������)�ϣ����൱���������㸽�������������ӡ�����
(�������)�ϣ����൱���������㸽�������������ӡ����� Խ�ӽ������㣬�������ӵ�Ч��Խ�����������������Vk��ɴﵽ��ͬ��Ч�������ֹ�����������ɿɽ��ͶԳ�ʼ����������Ҫ���������ƹ����dz�������
Խ�ӽ������㣬�������ӵ�Ч��Խ�����������������Vk��ɴﵽ��ͬ��Ч�������ֹ�����������ɿɽ��ͶԳ�ʼ����������Ҫ���������ƹ����dz�������
2 �ƽ�����������
��֪ģ���������ƽ����ʷ�����о���ģ������Ļ��־�����Ҫ���塣����ģ�������������ܱƽ�����ʵ�������������ıƽ�DZ�ܣ��������Ƿ�߱������⾫�ȱƽ����ſ�������������������ģ��������������ʱ���ϱ���Ϊһ�ֶ�̬����ģ��ϵͳ�����ǣ���ÿ���������ڣ������ֲ��䣬����Ӧ����Ϊһ�־�̬����ģ��ϵͳ���ڲ������ڣ��������۵ı�����ģ��������������[5]���۵Ļ���ģ����������ģ������������ͬ�ģ���������[5]�Ѿ�֤������һ�����ܱƽ�������ˣ���Ҫ֤������ʽ(9)�ı�����ģ��������������ʱ���������ܱƽ�������ֻҪ֤�����ıƽ������������Լ��ɡ�Ϊ�ˣ��ȸ������� ������
����1 ����g(xk)�Ƕ��ο�������ʵ������������2������������
(1) ��ʼ����ģ���� �DZ��ġ�һ�µġ�������[8]������
�DZ��ġ�һ�µġ�������[8]������
 (10)
(10)
(2) ��ʼ���ģ���� (j=1��2������m)������
(j=1��2������m)������ ���㣺
���㣺
 (11)
(11)
��
 (12)
(12)
���У� ��f(xk)������ʽ(9)�ı�����ģ����������
��f(xk)������ʽ(9)�ı�����ģ����������
֤�� �ȶ�������һ�����ӣ�
 (13)
(13)
���ǣ�


��һ�����ã�

 (14)
(14)
��ʽ(11)�ã�
 (15)
(15)
��ʽ(13)ʽ�ã�
 (16)
(16)
��ʽ(15)�ɵã�


 (17)
(17)
����



��������[19]���������Բ�ֵ���ۣ���



ͬ����



���ǣ�



֤�ϡ�
����ʽ(10)�������������㣬����ͼ1��ģ��������ʹ֮��������ʽ(11)�У�g(xk)����֪��Ŀ�꺯���� ���DZ��������һ���������ӣ�
���DZ��������һ���������ӣ� ������ͼ1��ʾģ���������ġ���ˣ�������ģ������������Ʋ���(j=1��2������m)��ȫ����ͨ��ʽ(11)ȷ����
������ͼ1��ʾģ���������ġ���ˣ�������ģ������������Ʋ���(j=1��2������m)��ȫ����ͨ��ʽ(11)ȷ����
���⣬��ʽ(12)��֪������ʽ(9)�ı�����ģ����������һ�����ж����ȵıƽ��������������Ȧš�0�������hi��0�����ǣ�hi��0����ζ�������������Ϊ���������ʵ�ʹ���������ʵ�ֵġ���ˣ���ѡȡ���Ȧţ������ڱƽ��������������֮��ȡ�����С�
����1 �������������k=0��1��2�������Ǧ�k=  ����
���� ����
����
 (18)
(18)
���У�����һ�����С��������(��ʽ(4)��(5))��
֤������������1�ɵã�
 (19)
(19)
��ʽ(4)���У�
 ��i=0��1��2������n
��i=0��1��2������n
�����ɵã�
 (20)
(20)
���ǣ�ʽ(18)�����ɵá�
֤�ϡ�
����1����������ģ���������ıƽ�����������ġ�������Ϊ����1�����С�������� ��hi ������������
��hi ������������ Ҳ��һ�����С����������ˣ���xk�ӽ�ƽ���ʱ��������ģ���������ıƽ������൱�ߡ�ֻҪ��ȡ���㹻С���ƽ����Ⱦͻ��������㹻�ߡ���Ӻ����ƽ��ĽǶȽ��ͱ�����ģ�����������и߾��ȵ�ԭ��
Ҳ��һ�����С����������ˣ���xk�ӽ�ƽ���ʱ��������ģ���������ıƽ������൱�ߡ�ֻҪ��ȡ���㹻С���ƽ����Ⱦͻ��������㹻�ߡ���Ӻ����ƽ��ĽǶȽ��ͱ�����ģ�����������и߾��ȵ�ԭ��
3 �������
ǰ����֤��������ģ����������������ʱ���������ܱƽ��������ǣ��������ֻ��˵��������ģ���������߱������⾫�ȱƽ���������ʵ��������������û�������������⣺�������һ����֪�ķ����Ժ���g(x)�;��Ȧţ���ô����λ������������㾫�Ȧ��д��о����������ͨ����ΪѰ��ģ����������Ϊ�ƽ����ij����������Ϊ��������ܹ�ָ������Ļ��֣��ɱ��ͳ����ƾ�����ܶϻ�������ıˣ����ԣ������������֤�����ܱƽ��Ը������塣
����2 �����ʼ���� ��������߽�����
��������߽����� (i=0��1��2������n)������ģ����
(i=0��1��2������n)������ģ���� ������
������ (j=1��2������m)���ȵطֲ���
(j=1��2������m)���ȵطֲ��� ���������ƽ����Ȧţ����������ʽ(9)�ı�����ģ��������ʹ
���������ƽ����Ȧţ����������ʽ(9)�ı�����ģ��������ʹ ������������Ϊ
������������Ϊ
 (21)
(21)
���У�intΪȡ��������
֤�� ���ȣ�����hi=��
��Ϊ������ƽ�����֣����Կɵã�


��h=h1�����ǣ���M=U/h��
Ϊ��֤�����ľ��Ȧţ���������1��MӦ�����㣺
 (22)
(22)
����ʽ(4)�ͱ߽��������� (k=1��2��3����)�����ԣ�ʽ(21)�������ij��������
(k=1��2��3����)�����ԣ�ʽ(21)�������ij��������
֤�ϡ�
����MISOģ����������ÿ��������Ӧ��ģ��������������������M��1���������������Ϊmr����mr=(M+1)n��nΪ�������������
ʽ(21)��Ϊ�ƽ����ij�������������б����ԣ����ô˷����õ���ʵ�ʱƽ�����Ҫ���ڸ������Ȧš���ϵͳ�����ȶ������֪��ϵͳ������̬���� ����ô��
����ô�� ����ˣ���ϵͳƽ��������ڣ�ʵ�ʱƽ�����ҪԶ���ڸ������Ȧš�
����ˣ���ϵͳƽ��������ڣ�ʵ�ʱƽ�����ҪԶ���ڸ������Ȧš�
4 ��ֵʵ��
������U=[-3.64��3.64]�����һ��������ģ��������f(xk)�Աƽ�����
 (23)
(23)
ʹ�侫�Ȧ�=0.2���� ��
��
���ں���g(xk)����


����ʽ(21)����ȡM=13������U������Ϊ14��ģ������ʱ����=0.2���������ǣ�ȡ-3.64��-3.08��-2.52��-1.96��1.40��-0.84��-0.28��0.28��0.84��1.40��1.96��2.52��3.08��3.64��Ϊ����ģ���� �����ģ���Ӧ�����������������£�
�����ģ���Ӧ�����������������£�



ȡ��������

��ʽ(10)��(12)�ɵñ�����ģ������������ʽΪ��
 (24)
(24)
�����������£����� ����ɵ�һ�־�̬����ģ�������������ı���ʽΪ��
����ɵ�һ�־�̬����ģ�������������ı���ʽΪ��
 (25)
(25)
�������� ��
�� ��ͨ���������ֵģ�⣬�õ�����g��f1��f2������ͼ2��ʾ��h1��h2��������ͼ3��ʾ��
��ͨ���������ֵģ�⣬�õ�����g��f1��f2������ͼ2��ʾ��h1��h2��������ͼ3��ʾ��

ͼ2 ����g��f1��f2�����߶Ա�
Fig.2 Curve contrast of g, f1 and f2
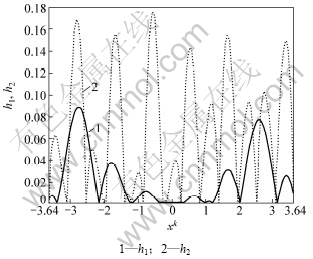
ͼ3 ����h1��h2�����߶Ա�
Fig.3 Curve contrast of h1 and h2
��ͼ2��3�ɼ���f1��f2����������U=[-3.64��3.64]�Ͼ���������ľ��Ȧ�=0.2�����ǣ�f1��f2���ƽ�Ŀ�꺯��g����ƽ���(x=0)������f1ʽ�������ر����ԣ��ɿ���f1��g�ص�����˵���ƽ������ƽ���������0����ˣ�����g(xk)����ij���ſ������Ŀ����ɣ��������ģ����������ƽ��㸽������ȫ��Ч��������ſ�������������̶��Ĵ�ͳģ�����������ܴﵽ���Ч�������⣬ͼ3����������ģ�������������������ϵ�ʵ�ʱƽ�����ԼΪ0.095������ģ����������ʵ�ʱƽ�����ԼΪ0.178��ǰ�߱Ⱥ��߸߳�87.4%����Ϊ�������Ȧ�=0.2������������֤ʽ(21)ȷʵ��һ�����������������2���б����ԡ�
5 ����
(1) ֤��������ģ���������ıƽ�����������ģ��Ӷ��ó���������ʱ������һ�����ܱƽ����Ľ��ۡ�������۱���������ģ���������߱������⾫�ȱƽ����ſ�������������
(2) ����������ģ����������Ϊ�ƽ����ij�����������ݴ˳���������ɵõ����������ģ������������ģ����������ɵó�ģ���������������������
�ο����ף�
[1] �����. Fuzzy���Ƶı�����һ��߾���Fuzzy�����������[J]. ����������Ӧ��, 1997, 14(6): 868-872.
LI Hong-xing. Essence of fuzzy control in mathematics and design on a class of high-accuracy fuzzy controller[J]. Control Theory & Applications, 1997, 14(6): 868-876.
[2] �����. ����������Ӧģ��������[J]. �й���ѧ: E��, 1999, 29(1): 32-42.
LI Hong-xing. Adaptive fuzzy control based on variable universe[J]. Science in China: Series E, 1999, 29(1): 32-42.
[3] �����, ��־��, ������. ������ϵͳ�ı������ȶ�����Ӧģ������[J]. �й���ѧ: E��, 2002, 32(2): 211-223.
LI Hong-xing, MIAO Zhi-hong, WANG Jia-yin. Variable universe stable adaptive fuzzy control of nonlinear system[J]. Science in China: Series E, 2002, 32(2): 211-223.
[4] LI Hong-xing, MIAO Zhi-hong, WANG Jia-yin. Variable universe adaptive fuzzy control on the quadruple inverted pendulum[J]. Science in China (Series E), 2002, 45(2): 213-224.
[5] WANG Li-xin, Mendel M. Fuzzy basis functions, universal approximation, and orthogonal least-squares learning[J]. IEEE Transactions on Neural Networks, 1992, 3(5): 807-814.
[6] ZENG Xiao-jun, Singh M G. Approximation theory of fuzzy systems- MIMO case[J]. IEEE Transactions on Fuzzy Systems, 1995, 3(2): 219-235.
[7] LI Yong-ming, SHI Zong-ke, LI Zhi-hui Approximation theory of fuzzy systems based upon genuine many-valued implications-MIMO cases[J]. Fuzzy Sets and Systems, 2002, 130(2): 159-174.
[8] Castro J L. Fuzzy logic controllers are universal approximators[J]. IEEE Transactions on Systems, Man and Cybernetics, 1995, 25(4): 629-635.
[9] Yeh C T. Weighted trapezoidal and triangular approximations of fuzzy numbers[J]. Fuzzy Sets and Systems, 2009, 160(21): 3059-3079.
[10] Mohiuddine S A. Some new results on approximation in fuzzy 2-normed spaces[J]. Mathematical and Computer Modeling, 2011, 53(5/6): 574-580.
[11] WANG Jiang, SI Wen-jie, LI Hui-yan. Robust ISS-satisficing variable universe indirect fuzzy control for chaotic systems[J]. Chaos, Solitons and Fractals, 2009, 39(1): 28-38.
[12] YING Hao, DING Yong-sheng, LI Shao-kuan, et al. Comparison of necessary conditions for typical Takagi-Sugeno and Mamdani fuzzy systems as universal approximators[J]. IEEE Transactions on Systems, Man and Cybernetics Part A, 1999, 29(5): 508-514.
[13] LI De-chao, SHI Zhong-ke, LI Yong-ming. Sufficient and necessary conditions for Boolean fuzzy systems as universal approximators[J]. Information Sciences, 2008, 178(2): 414-424.
[14] LIU Pu-yin, LI Hong-xing. Hierarchical TS fuzzy system and its universal approximation[J]. Information Sciences, 2005, 169(3/4): 279-303.
[15] YING Hao. Sufficient conditions on general fuzzy systems as function approximators[J]. Automatica, 1994, 30(3): 521-525.
[16] YING Hao. Sufficient conditions on uniform approximation of multivariate functions by general Takagi-Sugeno fuzzy systems with linear rule consequents[J]. IEEE Transactions on Systems, Man and Cybernetics Part A, 1998, 28(4): 515-520.
[17] ZENG Ke, ZhANG Nai-yao, XU Wen-li. Comparative study on sufficient conditions for Takagi-Sugeno fuzzy systems as universal approximators[J]. IEEE Transactions on Fuzzy Systems, 2000, 8(6): 773-780.
[18] ������. ģ��ϵͳ��ģ�����ƽ̳�[M]. ����: �廪��ѧ������, 2003: 91-96.
WANG Li-xin. A course in fuzzy systems and control[M]. Beijing: Tsinghua University Press, 2003: 91-96.
[19] Powell M J D. Approximation theory and methods[M]. New York: Cambridge University Press, 1981: 245-246.
(�༭ ������)
�ո����ڣ�2011-09-29�������ڣ�2011-12-20
������Ŀ��������Ȼ��ѧ����������Ŀ(61074069)������ʡ�Ƽ��ƻ���Ŀ(2011FJ309)������ʦ��ѧԺ��ѧ����������Ŀ(11B40)
ͨ�����ߣ�����ǿ(1974-)���У����������ˣ������ڣ���ʿ������ģ��ϵͳ���ۼ�Ӧ���о����绰��13723840306��E-mail��dragon51@126.com

