An adaptive particle filter for mobile robot fault diagnosis
来源期刊:中南大学学报(英文版)2006年第6期
论文作者:段琢华 傅明 蔡自兴 于金霞
文章页码:689 - 693
Key words:mobile robot;fault diagnosis;particle filter;adaptive
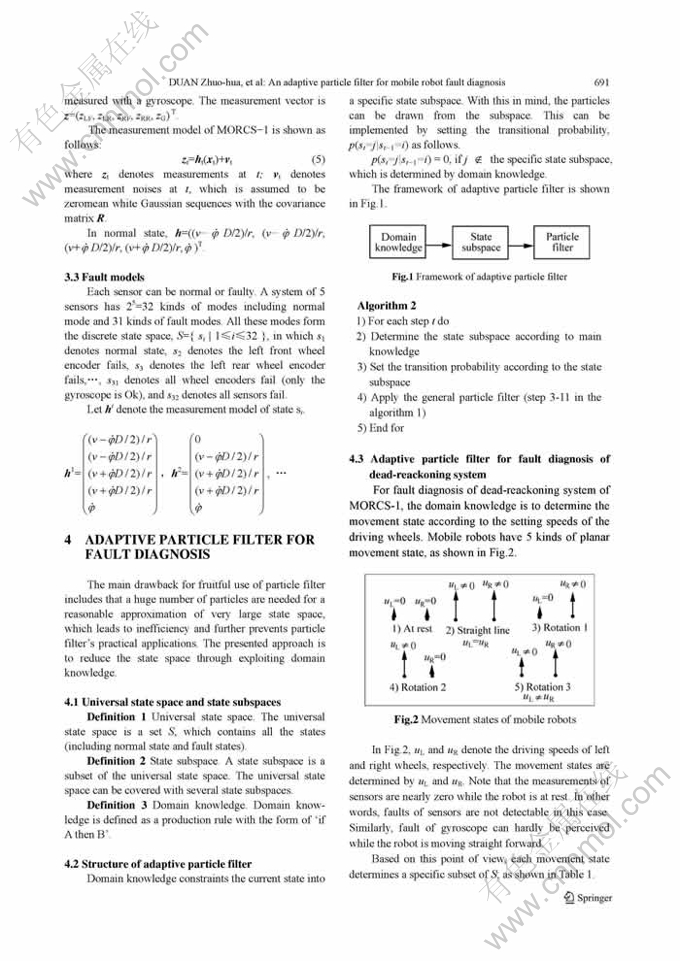
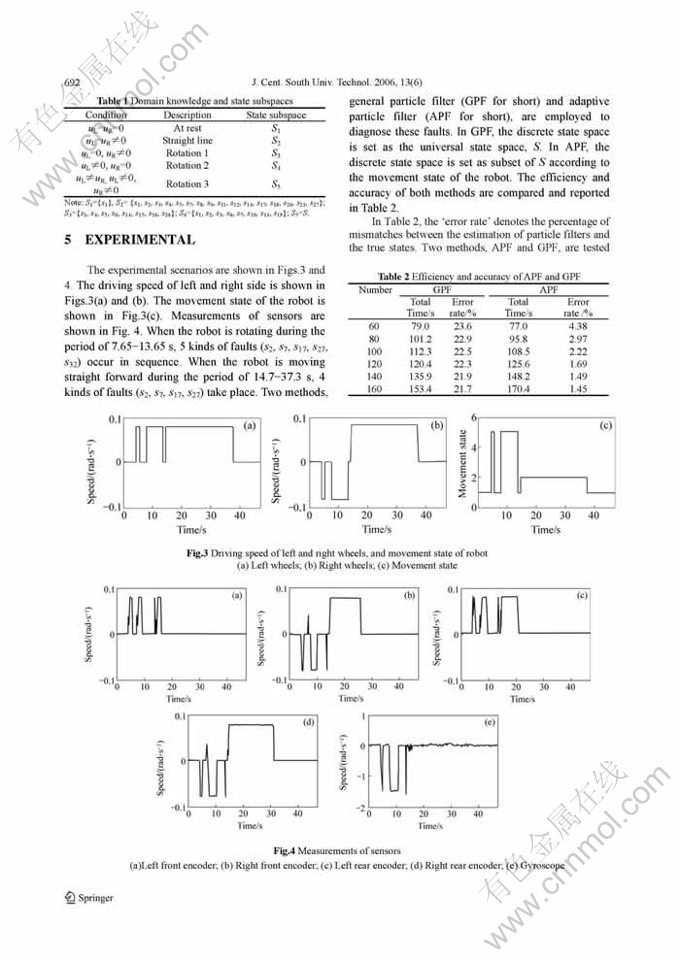
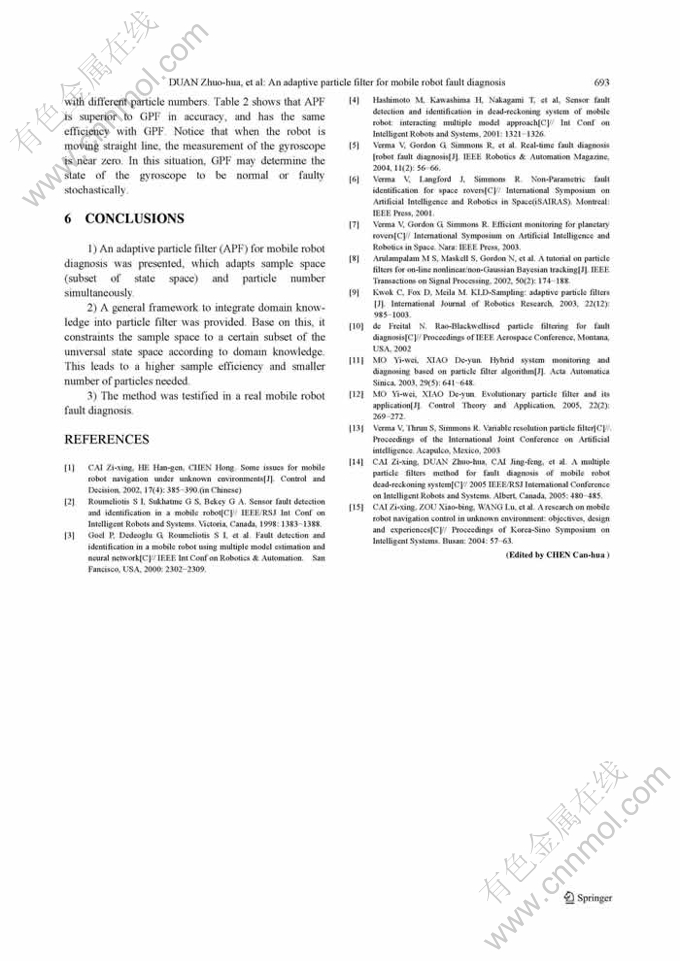
Abstract: An adaptive particle filter for fault diagnosis of dead-reckoning system was presented,which applied a general framework to integrate rule-based domain knowledge into particle filter.Domain knowledge was exploited to constrain the state space to certain subset.The state space was adjusted by setting the transition matrix.Firstly,the monitored mobile robot and its kinematics models,measurement models and fault models were given.Then,5 kinds of planar movement states of the robot were estimated with driving speeds of left and right side.After that,the possible(or detectable)fault modes were obtained to modify the transitional probability. There are two typical advantages of this method,i.e.particles will never be drawn from hopeless area of the state space,and the particle number is reduced.