
����ͬ����������ϵͳ��ģ��ṹʸ����Ͽ���
��־��1, 2���Ź���1
(1. ��ɳѧԺ ������ͨ�Ź���ϵ, ���� ��ɳ��410003��
2. ���ϴ�ѧ ��е�����ع���ѧԺ������ ��ɳ��410082)
ժҪ���������ͬ����������ֱ��ϵͳӦ�ã����û�ģ�۲����ٶȴ����������㷨�۲�ǶȺ��ٶȵ����ٶȴ�����������������ٶȲ��û�ģ���ƺ͵������÷�����PIʸ�����Ƶ���Ͽ��Ʋ��ԡ�����ʵ����������������ͬ������������������е��ٶȷ�Χ���Լ�����5%�Ľ�ģ���ʱ������Ͽ��Ʋ��Թ���ʵ�ֽϼ�ϵͳ³����ǿ����̬��Ӧ�죬�Ӷ���֤��������Ͽ��Ʋ��Ե���ȷ�ԺͿ����ԡ�
�ؼ��ʣ�
����ͬ�������������ʸ����������Ͽ�������ģ��ṹ��
��ͼ����ţ�TM343 ���ױ�־�룺A ���±�ţ�1672-7207(2011)08-1986-06
Combined control of sliding mode variable structure vector for permanent magnet synchronous wind power system
ZHANG Zhi-gang1, 2, ZHANG Gui-xiang1
(1. Department of Electron and Communication Engineering, Changsha University, Changsha 410003, China
2. College of Mechanical and Vehicle Engineering, Hunan University, Changsha 410082, China)
Abstract: Aimed at the application of direct-drive permanent magnet synchronous wind power generating system, a combined control tactics that velocity was controlled by sliding mode variable structure vector and current was controlled by nonlinear PI vector controller were submitted based on a sensorless method of velocity using sliding mode observing sensorless control method of velocity to observe angles and velocities. The results show that the proposed combined control tactics are easy to implement, and the combined control system has good robustness and fast dynamic response in the possible running speed scope of motor and adding 5% errors of ideal model for permanent magnet synchronous wind power system, which verifies the accuracy and feasibility of the combined control tactics.
Key words: permanent magnet synchronous wind power generator; vector control; combined control; sliding mode variable structure
�������Ӽ���������ͬ�����(Permanent magnet synchronous generator, PMSG)���켼���ķ�չ[1-3]Ϊ���������豸����Ч�����ṩ�������ļ������ϡ����ڱ��ٺ�Ƶ�������缼���У�����ʡ�Գ������Լ�����������֮��û��ֱ����Ϲ��ܣ�������ͬ�������������ֱ��ϵͳ����������ʧ�١�ά���ɱ��͡���������������ǿ���ɿ��Ըߵ��ŵ�[4-9]���Ӷ���Ϊ���ٺ�Ƶ����������߷�չDZ������������֮һ[10]��������ͬ����������ֱ��ϵͳ�У�����ͬ�������������������װʽ�Ͷ༶��ת�ӽṹ�����������ٶȴ�������װ�����Լ���ת���ŵ����⡣��ʹ���ܰ�װ�ٶȴ�����������ͬ����������ֱ��ϵͳ�У��ٶȴ�����Ҳ����������ͬ����������ϵͳ�����Ӻͽӿڵ�·���������ⲿ�������ţ����ɽϴ�̶ȵؽ�������ͬ����������ֱ��ϵͳ�Ŀɿ��ԡ�Ϊ��������⣬��������ٶȴ����������������ͬ����������ֱ��ϵͳ�е�����ͬ������Ŀ��ơ�����ص�����ͬ��������ٶȴ��������Ƽ����о��У�������[11]������չ�Ŀ������˲�����ʹ������ͬ����������Ż�������Ӧ�����������ܺܺõ����Ʋ������Ŷ�������ϵͳ³���Խ�ǿ�����������˲��㷨���ӣ�����ʵ�ֽ�Ϊ���ѣ�Eskola��[12-13]���øߡ���Ƶ�ź�ע��ķ�����ʹ�ò�����������ͬ������������й��ƣ��Բ����仯�����У����н�ǿ���ȶ��ԡ���������ͬ����������ֱ��ϵͳ�У�����װ�õĿ���Ƶ�ʽϵͺ�ע���źŲ�����ת��������ͬ��ʹ�ô˷�������Ӧ��������ͬ����������ֱ��ϵͳ�С��������ͬ����������ֱ��ϵͳ���л���������ĸߴ������༫���ص�[14-15]�������������һ�ֲ��û�ģ�ṹ�۲����۲����ٶȴ����������㷨�۲�ǶȺ��ٶȵ����ٶȴ������������÷������и�ǿ��³���Ժ�ȷ�ԣ���������Ӧ���Ӷ��ķ������绷��������������ʵ�ֽ�Ϊ�����ô˿��Ƽ���������������ֱ��ϵͳ������ͬ�����ʸ������ϵͳ����������ͬ�����ȫ�ٷ�Χ�ڽ�����ʵ�������
1 ����ͬ�������������ģ��ṹʸ�����Ʒ���
1.1 ����ͬ�����������ʸ��ͼ����ѧģ��
����ͬ�����������ʸ����ͼ1��ʾ�����У���Ϊ���������ǣ�JΪ����ͬ�����������ת��������xOy����ϵ��y����ת�Ӹ�Ӧ�綯��e0����XOY����ϵ��Y���Զ��ӵ�ѹʸ��usȷ������
����xOy����ϵ�н�������ͬ�����������ʸ����ѧģ�͡�
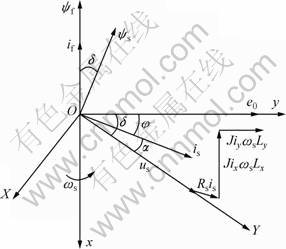
ͼ1 PMSG�ռ�ʸ��ͼ
Fig.1 Space-vector diagram of PMSG
�������ѹus��x�����ux�ɱ�ʾΪ��
ux=ussin ��=-Rsix-pLxix+��sLyiy (1)
ʽ�У���Ϊ���ʽǣ�RsΪ��������裻LxΪֱ���У�ixΪ���������is��xOy����ϵ�е�x�������pΪ�����ӣ���sΪͬ������ٶȣ�LyΪ�����У�iyΪ���������is��xOy����ϵ�е�y�������
�������ѹus��y�����uy�ɱ�ʾΪ��
uy=uscos ��=-Rsiy-��sLxix-pLyiy+��s��s (2)
ʽ�У���sΪ����ϳɴ��������ת��Tem�ɱ�ʾΪ��
Tem=1.5pn[��fiscos ��+0.5(Ly-Lx)is2sin (2��)] (3)
ʽ�У�pnΪ����������fΪת�Ӵ�������sΪ����ϳɴ�������Ź���Pem�ɱ�ʾΪ��
Pem=1.5��s[��fiscos ��+0.5(Ly-Lx)is2sin (2��)] (4)
�˶����̿ɱ�ʾΪ��
![]() (5)
(5)
ʽ�У�TLΪ�������ת�ء�
1.2 ��ģ��ṹʸ�����������
ȡ����ͬ�����������ʸ������״̬����Ϊ��
![]() (6)
(6)
ʽ�У���rΪ����ͬ���������������ת�٣���sΪ����ͬ�����������ʵ��ת�١��ۺ�ʽ(1)~(6)�ɵã�
 (7)
(7)
��![]() ��
��![]() ���ɵ�����ͬ�������������״̬�ռ����ʽΪ��
���ɵ�����ͬ�������������״̬�ռ����ʽΪ��
![]() (8)
(8)
Ϊʹ����ͬ����������������ص����ȶ���ѡ��sΪ��ģ�棬��
s=cz1+z2 (9)
������ͬ�����������ʸ��ϵͳ�ı�ָ��������Ϊ��
![]() (10)
(10)
ʽ�У��źͦ��ֱ�Ϊ���趨�ı�ָ�������ɲ�����sign(s)Ϊ���غ������ɶ���Ϊ��
 (11)
(11)
�ʿɵ�����ͬ�������������ָ�������ɵĻ�ģ�������Ŀ�����Ϊ��
![]() (12)
(12)
ʽ(12)����������ͬ������������ڻ�ģ�������˶����ָ����ʽ����ģ���˶������ӽ���ģ��ʱ������ͬ����������������л������䴩Խ��ģ����ٶȺͷ��Ⱦ������ľ���ֵ(|z1|=|��r-��s|)�ļ�С����С��������������ջ��ȶ���ԭ�㣬���Ϊ0�����¶���Ļ�ģ�л���sign(s)��ʧ������������Ϊȷ������ͬ��������������ԽϿ���ٶȽ��뻬ģ�棬�������������ԭ������������Ķ���ͨ���ſ����趨�ñȽ�С���������趨�ϴ�ֵ��
1.3 ����ͬ��������������ٶȴ���������
�������������ٽ��з���ʱ������ͬ��������������ӵ�ѹ��Ƶ�ʺͷ�ֵһ��ռ�Ƶ�ʺͷ�ֵ��30%���ϣ��ҿ���ʱ�������ѹus��ͬ��ת�Ӹ�Ӧ�綯��e0����ˣ������û��ڵ�ͬ���ο�����ϵ���������(Single synchronous reference frame software phase locked loop, SSRF-SPLL)ģ������us�����������ʱ��ת�Ӵų�λ�ÿ�ʵʱȷ�������ҵ�����ͬ�������������������ʱ����ͼ1��ʾʸ����ϵ�Լ��������ѹus��ת�Ӹ�Ӧ�綯��e0�����ǶȦģ���ɲ���SSRF-SPLLģ������Ķ��ӵ�ѹʸ���Ǧ���Ϊǰ�����룬���ݵ��ģ�ͺ�ģ�Ͳο�����Ӧϵͳ(Model reference adaptive system, MARS)ԭ����ȡ�ģ����ʵ��ת��λ�õ�ȷ����
1.3.1 �������ѹ��ʸ����ֵȷ��
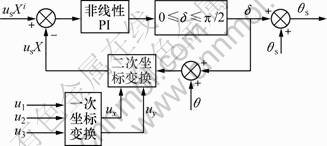
usʸ������Ǧȿ�ͨ��SSRF-SPLLģ��ʵʱ��⣬�����ԭ����ͼ2��ʾ����ͼ2�У�u1��u2��u3Ϊ���������Ķ��������ѹ��һ������任��ʾ���ྲֹ����ϵ�����ྲֹxOy����ϵ�ı任����������任��ʾxOy����ϵ��XOY����ϵ�ı任��usX��usYΪXOY����ϵ�еĶ��ӵ�ѹ��������sΪus��ͬ����ת���ٶȡ�ͼ2�ж��ӵ�ѹus������Y���ϣ���ͼ1��ʾ��
������ͬ��������������ӵ�ѹ�к��иߴ�г������ͼ2ģ���д���2�����ֻ��ڣ���ͨ���ʵ���������ͬ��������������ӵ�ѹ��Ƶ������ɶԸ�Ƶ������ǿ���������ã��Ӷ�ʹ��SSRF-SPLLģ�͵�³���Խ�ǿ��
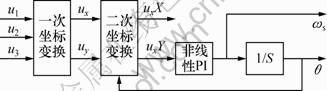
ͼ2 SSRF-SPLL���ƽṹԭ��ͼ
Fig.2 Control structure of SSRF-SPLL
1.3.2 ת��λ�ö��������
ͨ��SSRF-SPLLģ�ͼ���PMSG�Ħ�s�ͦȺĿ�ͨ��ģ�Ͳο�����Ӧ����ʵʱȷ����������ͬ�������������̬��������ʱ��ʽ(1)����ת��Ϊ��
![]() (13)
(13)
ʽ�У��ϱꡰi����ʾ���ο�����š�
����ʽ(13)�ͼ��Ħȣ���ɹ�����ͼ3��ʾ������ͬ�����������ת��λ�ö�����������Ӷ��ɻ�ȡ�ĺ�xOy��Ķ���ǶȦ�s��ͼ3�У�uyΪ�ɵ�����ͨ���ջ����ڦģ�ʹuxʵʱ���ٲο���uxi���Ӷ�ʵ�֦ĺͦ�s��ģ�Ͳο�����Ӧ���ơ�
ͼ3 ����ͬ�����������ת��λ�ö��������
Fig.3 Controller of rotor position orientation for permanent magnet synchronous wind power generator
2 ����ͬ����������ϵͳ��ģ��ṹʸ������ʵ��
2.1 ������PI������
�ڴ�ͳPI�������Ļ����ϼ���������IJ������������ϵͳ�ο�����r(t)�����y(t)�����e(t)���ɵķ����Ժ������������e(t)���ɷ����Ժ��������������e(t)���ɵķ����Ժ����ж���ѡ������������·����Ժ�����ʽ��
![]() (14)
(14)
ʽ�У�K0Ϊ����������ϵ����
![]() (15)
(15)
������PI������ʽΪ��
![]() (16)
(16)
ʽ�У�K0Ϊ����������ϵ����KpΪ��������ϵ����TiΪ����ʱ�䳣����ʽ(6)д�ɴ��ݺ�������ʽΪ��
![]() (17)
(17)
ѡȡ��С�IJ�������T0����
![]() (18)
(18)
![]() (19)
(19)
ʽ�У���f=��e(n){exp[K0e(n)]-exp[-K0e(n)]}/2����e(n)= e(n)-e(n-1)��Ki=KpT0/Ti��
2.2 ����ͬ����������ϵͳ��ģ��ṹʸ����Ͽ��Ʒ���
����Matlab/simunink���棬�������Lx=Ly=9.0 mH��Rs=3.125 ������f=0.2 Web��p=4��J=8.5 g��m2������ͬ�������������ģ��ṹʸ����Ͽ���ϵͳ������ͼ4��ʾ����Ͽ��Ʋ���ͼ���ڸ���Ͽ��Ʋ����У��ٶȵ��������û�ģ���Ʋ��ԣ����������÷�����PIʸ�����ƣ����������ͼ5~7��ʾ��
ͼ5��ʾΪ���������ٶȱ仯�������ߡ���ͼ5�ɼ���������ͬ�������������ģ��ṹʸ����Ͽ��ƺ�ÿ�ε�������ȶ����Ƶ�ʺ�����ֵ���Ǻϣ�ʵ���˿������Ե���Ͽ��ƺͱ��ٺ�Ƶ�����ԡ�����ͼ6��ʾ�Ľ��ٶȻ�ģ��������Ͽ��ƱȽϿ��Ե�֪���봫ͳ�Ļ�ģ���ƿ�����ȣ�����ͬ�������������ģ��ṹʸ����Ͽ��Ʒ��������١�
����ͬ�����������ת�ٲ��η���������ͼ7��ʾ����ͼ7���Կ��������û�ģ��ṹʸ����Ͽ��Ƶ�����ͬ�������ת���������ʿ죬�ڴﵽ�ȶ�ֵʱ�����������ٶȻ����û�ģ��ṹʸ�����Ƶĵ��ת����Ӧʱ�䳤���г�������
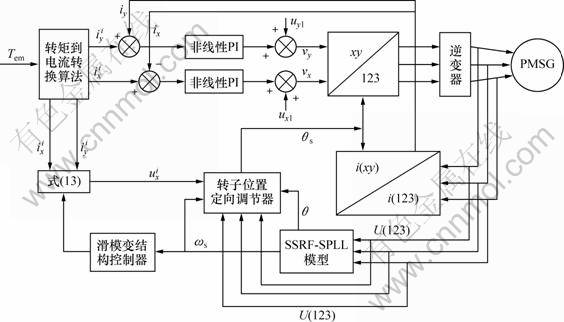
ͼ4 ����ͬ�������������ģ��ṹʸ����Ͽ��ƿ�ͼ
Fig.4 Structure of combined control of sliding mode variable structure vector for permanent magnet synchronous wind power generator
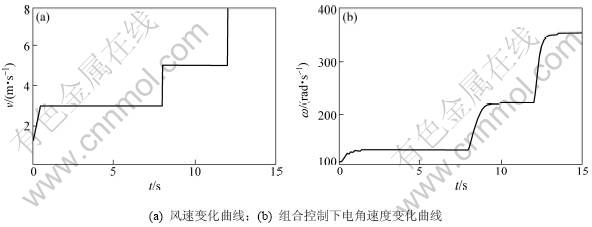
ͼ5 ���������ٶȱ仯����
Fig.5 Wind speed and electrical angle frequency
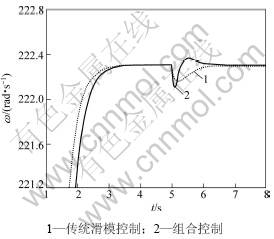
ͼ6 ���ٶȻ�ģ��������Ͽ��ƱȽ�ͼ
Fig.6 Comparison of sliding mode control and combined control

ͼ7 ���ת�ٲ���
Fig.7 Waveform of speed response of motor
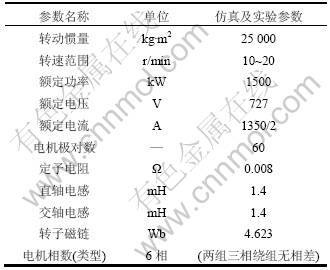
�����1��ʾ����������¼���5%�Ľ�ģ���ֱ���ñ�������Ļ�ģ��ṹʸ����Ͽ��Ʒ���������[16]���Ʒ������п��ƣ��ɵõ���ٶ�ʱ����Ӧ�ԱȽ����ͼ8��ʾ��
ͼ8�������������5%�Ľ�ģ���Բ�������[16]���Ʒ������õ��ĵ���ٶ�ʱ����Ӧ����Ӱ��ϴ��Ա�������Ļ�ģ��ṹʸ����Ͽ���ϵͳӰ���С��˵����������Ļ�ģ��ṹʸ����Ͽ���ϵͳ���нϺõ�³�����ܡ�
��1 ��������ͬ���������������
Table 1 Parameters of PMSG
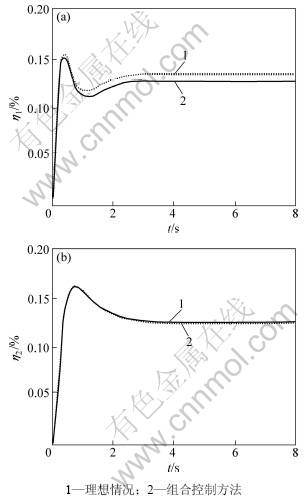
ͼ8 ����ٶ�ʱ����Ӧ�Ա�
Fig.8 Contrast to electrical angle time respond
3 ����
(1) �������ͬ����������ֱ��ϵͳ�Ĺ���Ӧ�ã����û����ִ��������۵Ļ�ģ�۲����ٶȴ����������㷨�۲�ǶȺ��ٶȵ����ٶȴ�����������������ٶȵ��������û�ģ���Ʋ��ԡ����������÷�����PIʸ�����Ƶ���Ͽ��Ʋ��ԡ�
(2) �ڵ���������е��ٶȷ�Χ�ڣ����㷨����ʵ�ֽϼ�ϵͳ³����ǿ����̬��Ӧ�죬�Ӷ���֤����������㷨����ȷ�ԺͿ����ԡ�
(3) ����5%�Ľ�ģ���Ա�������Ļ�ģ��ṹʸ����Ͽ���ϵͳӰ���С���ʱ�������Ļ�ģ��ṹʸ����Ͽ���ϵͳ���нϺõ�³�����ܡ�
�ο����ף�
[1] ����, ��˳��. �������ŷ�������ſ���[J]. �й��������ѧ��, 1998, 18(2): 87-90.
LIAO Yong, YANG Shun-chang. Excitation control of alternating current excitation generators[J]. Proceedings of the Chinese Society for Electric Engineering, 1998, 18(2): 87-90.
[2] Fernandez L M, Garcia C A, Jurado F. Comparative study on the performance of control systems for doubly fed induction generator wind turbines operating with power regulation[J]. Energy, 2008, 33(2): 1438-1452.
[3] Miao Z X, Fan L L. The art modeling and simulation of induction generator in wind generation applications using high-order model[J]. Simulation Modeling Practice and Theory, 2008, 16(5): 1239-1253.
[4] ����, ��ͬׯ, ��ѩ��. ֱ��ʽ��������ϵͳ�������ٲ����о�[J]. �������Ӽ���, 2007, 41(7): 3-5.
LING Yu, ZHANG Tong-zhuang, QIU Xue-feng. Study on maximum power extraction control for directly drived wind power generating system[J]. Power Electronics, 2007, 41(7): 3-5.
[5] �����, ���濵, ���ʵ�. ���ٺ�Ƶ��������ϵͳ�������ٿ���[J]. ����ϵͳ�Զ���, 2003, 7(20): 62-67.
LIU Qi-hui, HE Yi-kang, ZHAO Ren-de. The maximumal wind-energy tracking control of available speed constant frequency wind power generation system[J]. Automation of Electric Power Systems, 2003, 7(20): 62-67.
[6] Morren J, Sjoerd H W. Ride through of Wind Turbines with doubly-fed induction generator during a voltage dip[J]. IEEE Transactions on Energy Conversion, 2005, 20(2): 435-441.
[7] �����. ���ٺ�Ƶ��������ϵͳ����������о�[D]. ����: �㽭��ѧ��������ѧԺ, 2005: 48-66.
LIU Qi-hui. The investigation of operation and control for a variable-speed constant-frequency wind power generation system[D]. Hangzhou: Zhejiang University. College of Electrical Engineering, 2005: 48-66.
[8] Slotine J E, Li W. Applied non-linear control[M]. Engle-wood Cliffs, NJ: Prentice-Hall, 1991: 226-269.
[9] ֣ѩ÷, ����, ����. ���������ģ�Ͳ�ȷ��ϵͳ�ն˻�ģ�ֽ���Ʒ���[J]. ����������Ӧ��, 2004, 21(1): 11-16.
ZHENG Xue-mei, FENG Yong, BAO Sheng. Terminal sliding model decomposed control of multivariable linear uncertain systems[J]. Control Theory & Applications, 2004, 21(1): 11-16.
[10] Wu W, Ramsden VS, Crawford T, et al. A low-speed, high-torque, direct-drive permanent magnet generator for wind turbines[C]// IEEE Industry Applications Conf. 2000. 147-154.
[11] ����, ����ϼ, ��־��. ����EKF������ͬ�����ת��λ�ú��ٶȹ���[J]. ϵͳ����ѧ��, 2005(7): 1704-1707.
JIANG Jun, SHEN Yan-xia, JI Zhi-cheng. Speed and rotor position estimation for PMSM based on EKF[J]. J System Simulation, 2005(7): 1704-1707.
[12] Eskola M, Tuusa H. Sensorless control of salient pole PMSM using a low-frequency signal injection[C]//2005 European Conference on Power Electronics and Applications. Tampere, Finland, 2005: 106-115.
[13] �ط�, ���濵, �ֺ�ƽ. ����ת��λ���Լ�⸴�Ϸ���������ͬ��������ٶȴ����������о�[J]. �й��������ѧ��, 2007, 27(3): 12-17.
QIN Feng, HE Yi-kang, JIA Hong-ping. Investigation of the sensorless control for PMSM based on a hybrid rotor��position self-sensing��approach)[J]. Proc CSEE, 2007, 27(3): 12-17.
[14] Hilmy Awad, Jan Svensson, M J Bollen. Tuning software phase-locked loop for series-connected converters[J]. IEEE Trans on Power Delivery, 2005, 20(1): 300-308.
[15] ���̭G, ʷ��. ���ѧ[M]. ����: ��е��ҵ������, 2011: 15-25.
TANG Yun-qiu, SHI Nai. Electric machinery[M]. Beijing: China Machine Press, 2011: 15-25.
[16] ������, ����, �ų�Ρ, ��. ��������ͬ��������������ٶȴ�����ʸ�����Ʒ����о�[J]. �繤�����¼���, 2009, 28(4): 19-22, 41.
WANG Ling-xiang, ZHANG Xing, ZHANG Chong-wei, et al. A sensorless vector control method for MW level permanent magnet synchronous generator[J]. Advanced Technology of Electrical Engineering and Energy, 2009, 28(4): 19-22, 41.
(�༭ �²ӻ�)
�ո����ڣ�2011-01-04�������ڣ�2011-03-10
������Ŀ������ʡ�������������������Ŀ(09B012)����ɳ�пƼ��ƻ���Ŀ(K0902141-11)
ͨ�����ߣ���־��(1971-)���У����ϳ�ɳ���ˣ���ʿ�о����������ڣ����µ������������ܿ��ƣ��绰��13574883197��E-mail��zzglin@sina.com
