
������ǿ�µ����ǵ����Ǽ��źŸ�����������
Ф־�����Σ���С�ã�����ѩ
(�����Ƽ���ѧ ���ӿ�ѧ�빤��ѧԺ������ ��ɳ��410073)
ժ Ҫ��
�źŸ����Ľ��ջ�ʵ�ֽṹ���ڴ˻�����ͨ�������Ƶ�����ֵ��������������Ǽ��źŸ���������ز���λ�������ޡ��о�����������������Ǽ��źŸ������ɻ��������ز����ٻ�·���ɽ��ջ��˶�����Ķ�̬���Ӷ���������·�Ķ�̬��Ӧ�ԡ��ڳ����̬Ϊ1~50g/s���������ǵ�GDOPֵ�ߴ�50�Ķ�������£��������Ǽ丨�������������ǵ��ز���λ��������Ϊ23~25 dB���������������½���7~13 dB����Ȼ���Ǽ��źŸ���������Ϊ�ɹۣ��ҶԸ������ǵ�GDOPֵҪ�ߡ���ˣ�ѡ������ǿ����ʱֻ��Ҫ��֤���������ȫʱ�ο��Թ۲4�����Ϲ�����ǿ���Ǽ��ɣ���ʱ���Խ��ƴﵽ��ȫ����������ǿһ�������ܡ�
�ؼ��ʣ�
������ǿ���ز��������������Ǽ��źŸ�����
��ͼ����ţ�TN967.1 ���ױ�־�룺A ���±�ţ�1672-7207(2014)02-0468-06
Analysis of inter-satellite signal assistance capacity under satellite power enhancement
XIAO Zhibin, ZHANG Xin, TANG Xiaomei, WANG Feixue
(School of Electronic Science and Engineering, National University of Defense Technology, Changsha 410073, China)
Abstract: The architecture of receiver was designed based on inter-satellite signal assistance and the carrier phase tracking threshold that incorporates the inter-satellite signal assistance was analyzed through theoretical deduction and numerical calculation on this basis. The results indicate that the inter-satellite signal assistance can essentially eliminate the dynamic introduced by the motion of the receiver in the carrier tracking loop, thereby improving the dynamic adaptability of the loop greatly. When impact dynamic is 1-50g/s and the GDOP value of the assisted satellite is 50, after the inter-satellite assistance is added, the carrier phase tracking threshold of the assisted satellite will be 23-25 dB, lower than that without assistance by 7-13 dB. Inter-satellite signal assistance capacity is obviously considerable and does not have a high requirement for the GDOP value of the assisted satellite. Accordingly, when power enhancement satellites are selected, it is only necessary to ensure that four or more power enhancement satellites are observed all the time in the relevant area, which can almost reach the same performance of the power enhancement of the whole satellite constellation.
Key words: power enhancement; carrier tracking threshold; inter-satellite signal assistance
����GPS��չ���̺������ǵ������辭���ֱ��������ǵ���ϵͳ�ؽ����ٸ��ָ��ӵĵ�Ÿ��ţ�����ս����[1-5]ֱ��Ӱ�쵽ϵͳ�������������ڵ���ս�����£�Ϊ��ߵ���ϵͳ������[6-7]������һ����Ҫ�������źŽ��й�����ǿ����������һ��GPS�ƻ�����GPS III[1-3]�����Ȳ��ƽ���GPSIIIC���������M�빦����ǿ[1]�����ƻ���GPSIIIC�й�����ǿ��ʵʩĿ�������ض���Χ�ڲ����������ź�������Լ20 dB�ľ���M���źš�GPS IIIC������ǿ����ʹ��ÿһ���������ӹ��ʵĻ���Լ3 500����Ԫ�������������ĵ�أ���������ߺ��������̫���ܷ��壬�ҹ�����ǿ��Խ���������Խ����ǿ���ǵ�ѡ������ǿ����ȷ���Ƿ�����Ч�ܵ�һ�����п��ǡ����[8]�Ա���ϵͳ������ǿ�������Ƿ�Χ��������ط��������ڹ������ǵ�ѡ��Ӧ���ڱ�֤������ǿ����ﵽ�ı�ҪЧ���£�Ӧ�����ܼ��ٹ�����ǿ��������Ϊ��߹�����ǿЧ��ͬʱ�����ܼ��ٳɱ�����Ҫ�ھ����Ǽ��źŸ�����������������������˻������Ǽ��źŸ����Ľ��ջ�ʵ�ֽṹ�����ڴ˻����϶����ط����˹�����ǿ���������Ǽ�����źŸ������������������ָ��������ǿ��������ѡ�����Ǽ���źŸ�������һ������ϵͳ�Ը������ֶΣ��䱾���������������ⲿ�����ֶ���һ�µģ�Ŀǰ��Ҫ���ⲿ�����ֶ���Ҫ������������(WLAN)[9-10]�����Ե���ϵͳ����[11-12]��������������������GPS��λ����(assisted-GPS)[13]������ͨ������[14-15]�ȣ���Щ�ⲿ�����ֶζ���ͨ��ѹ���ź�ʱ�䲻ȷ�����Լ�ѹ����̬��������źŽ�����������������������Ǽ丨���µĽ��ջ��ṹ��Ҫ�����ز���λ���ٻ�·�м�������ո�����������ѹ����̬����߸��ٻ�·�Ķ�̬��Ӧ�ԡ�
1 ���Ǽ丨���Ļ���ԭ��
������ջ����յ�4�����Ϲ�����ǿ������ʵ���˳�ʼ��λ����ʱ�������ѽ��յĹ�����ǿ���ǹ��Ʊ��������ǵĶ����գ�����ѹ�������������źŶ�̬�������䲶����١������ջ����յ�������С��4��ʱ�����ڽ��ջ������Ƶ�ʲ�ȷ���Ƚϴ����չ������ϴ����źŸ����������������ﲻ������������з�����
���ջ��ĸ���������Ҫȡ�����ز����ٻ�·�����Ǽ���źŸ�����Ҫ����Ϊ�����ز����ٻ�·֮��ĸ�����������ز����ٻ�·�����ṹ��ͼ1��ʾ��������Ϣ����ģ�鶨λ����Ƶ��Ҫ���ڻ�·����Ƶ�ȣ���������Ϣ����ģ�����õ��Ķ����ո���ֵ������·�лᵼ�»�·����ʱ�����ո���ֵ�������䣬����Ӱ���ز����٣���˸��ٽ�ֱ�����ø����Ѹ���ͨ���Ķ����ղ���ֵ����Ͼ���ʸ�������Ǿ����ٶ�ֱ�ӹ��Ƴ��������źŵĶ����ա�
�ز����ٻ�·�����ṹֻ��Ҫ��λ����ģ���ṩ���Ǿ����ٶȡ���������ջ��ľ���ʸ�����ɣ��������߱仯�Ƚϻ�������˶Ը���Ƶ��Ҫ�ߡ��������������ͨ�������ո���ֵ�ļ��㷽���������Ѹ���������ΪN����������ջ�����ز����������1��
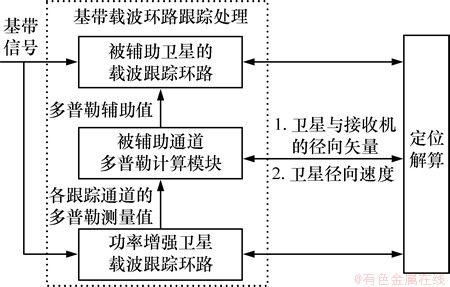
ͼ1 �ز����ٻ�·�����ṹ
Fig. 1 Assistance structure of carrier tracking loop
H ��Ha �ı���ʽ���£�
 (1)
(1)
 (2)
(2)
���У�ai=(axi��ayi��azi)Ϊ��i���Ѹ������ǵ����ջ��ĵ�λ����ʸ����aa=(axa��aya��aza)Ϊ���������ǵ����ջ��ĵ�λ����ʸ����
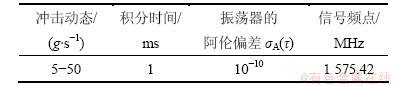
��1 ��������ջ�����ز���
Table 1 Relevant parameters of satellite and receiver
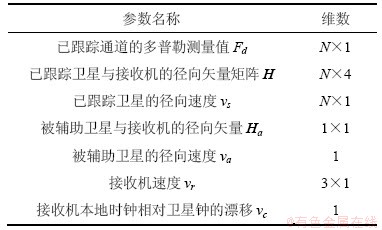
�����ź��ز�Ƶ��ΪfL������Ϊc������ջ��ٶ����Ѹ���ͨ���Ķ����ղ���ֵ����������ϵ��
 (3)
(3)
������С���˿��Եõ����ջ��ٶ��Լ�ʱ��Ư�ƣ�
 (4)
(4)
���ݽ��ջ��ٶȡ�ʱ��Ư�ơ����������ǵľ����ٶ��Լ���������������ջ��ľ���ʸ��������ñ��������ǵĶ����ղ���ֵΪ
 (5)
(5)
�����ƵĶ����ո���ֵfaid����������ͨ���ز����ٻ�·�У�����ѹ���źŶ�̬���������ز����١�������ͨ���ز���λ���ٻ�·��������FLL������PLL��·��ֻ�����е�FLLΪ������Ƶ��������·���߶�̬����£��ز���λ���ٻ�·һ�����3��·����ṹ��ͼ2��ʾ�������ռ���ģ�����Ķ����ո���ֵfaid�뱾���ز�Ƶ������õ�Ƶ������źţ����ź�ͨ��FLL��·�˲�������뵽PLL��·��ѹ��PLL��·�����붯̬�����Ц�0f ���0p�ֱ�ΪFLL��PLL����ȻƵ�ʣ���������ԵĻ�·������Ӧ��tΪ��·����ʱ��������Ϊ����ʱ�䡣
2 ���Ǽ��źŸ�����������
2.1 ���Ǽ�����ո�����Ϣ���ȷ���
���������Ƕ����չ��Ƶļ��㹫ʽ���£�
 (6)
(6)
���ǵľ����ٶȹ������һ��ҪС�������ٶȵĹ�����������������������ٶȾ���һ��Ϊ0.1
m/s�������������������ٶȾ���һ��Ϊ0.3 m/s���Ѹ������ǿɸ���������ȡ�����ٶȣ����������ǿ��Ը��������ȡ�����ٶȡ���vs ��va�Ĺ��Ʒ���ֱ�Ϊ��
 (7)
(7)
 (8)
(8)
��x=(HTH)-1HT(Fd-vsfL/c)=[x1��x2��x3��x4]T��xΪ4��1ʸ������x�����Ϊdx=[dx1��dx2��dx3��dx4]T��va�����Ϊdva�����������źŶ����չ������Ϊ
 (9)
(9)
����dx��dva���������ˣ������źŶ����չ��Ʒ���������ʽ��


 (10)
(10)
x�ķ�����Ա�ʾΪ
 (11)
(11)
�߶�̬�����¶����ղ�������ԼΪ0.5 Hz��һ�������Ϊ�Ѹ������ǵĶ����ղ�������ҪС��0.5 Hz���ʿ���ȡCov(Fd)=0.025IN��N���������
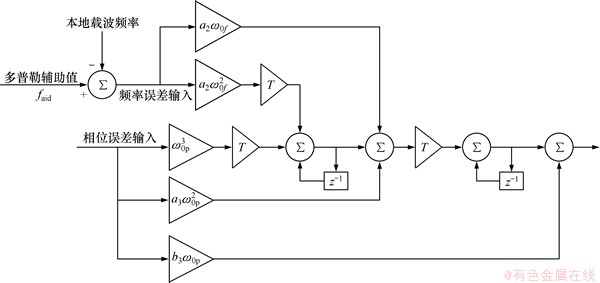
ͼ2 ���Ӷ����ո�����Ϣ����ز���λ���ٻ�·
Fig. 2 Carrier tracking loop with Doppler aid
 (12)
(12)
����(HTH)-1����ƽ����GDOPΪSGDOP����
 (13)
(13)
����ʽ(10)��(13)���Եõ������ո�����Ϣ���Ʒ���������ʽ��
 (14)
(14)
����GPS L1C/A�źţ�fL=1 575.42 MHz��������ʽ������ö����ո�������Ϊ
 (15)
(15)
2.2 ���Ǽ丨���µ��ز���λ����������
���Ǽ丨���µ��ز����ٻ�·�ṹ��ͼ(2)��ʾ��������2��FLL��·������3��PLL��·�� FLL��·������ֵΪ�����ո���ֵfaid�����ز���λ���ٻ�·PLL����Ҫ���Դ����PLL��·��������tPLL��FLL��·������ز���λ������pFLL������������v������ƫ�����������������A�Ͷ�̬Ӧ������e�����������������[10]��
 (16)
(16)
���У�����������v���Ժ��Բ��ơ�����ƫ����������������ı���ʽΪ
 (17)
(17)
PLL��·��������Ҫ�뻷·��������Bp���ź������C/N 0�Լ�����ʱ��T��أ��������ʽΪ
 (18)
(18)
FLL��·Ϊ�����Ľṹ���������Ƶ������s������������faid����·��������Bf�Լ�����ʱ��T��أ������ʽΪ
 (19)
(19)
��Ӧ���ز���λ����Ϊ
 (20)
(20)
FLL��·������������PLL��·���ɽ��ջ��˶�����Ķ�̬�������PLL��·�Ķ�̬Ӧ�������Ժ��Բ��ơ�����ʽ(15)~(20)����������ز���λ�������ı���ʽ���£�
 (21)
(21)
���� ��
��
 ��k3=259 200T3��
��k3=259 200T3��
�������ջ���̬R(t)������ʱ��T�Լ��Ѹ������ǵ�GDOPֵ���ڲ�ͬ���ź������C/N0��������ֵ����ķ���ѡ�����ŵ�PLL��·��������Bp_opt�Լ�FLL��·��������Bf_optʹ��PLL�ز���λ���پ���ȡ����Сֵ��PLL_min(C/N0)������ʽ(21)��ʾ���ز���λ���������鹫ʽ���Եõ��� ��15��ʱ���������ջ���̬R(t)������ʱ��T�Լ��Ѹ������ǵ�GDOPֵ���ز���λ��������Ϊ
��15��ʱ���������ջ���̬R(t)������ʱ��T�Լ��Ѹ������ǵ�GDOPֵ���ز���λ��������Ϊ
 (22)
(22)
2.3 �����µ��ز���λ����������
��������£�ͬ��������2��FLL��·������3��PLL��·����·����������FLL��PLL��·��ͬ������PLL��·�ľ������������ʽ(16)��ʾ��FLL��·����Ҫ���Դ������FLL��������tFLL�Լ���̬Ӧ����������Ƶ�ʲ���fe �������FLL��������Ϊ[10]��
 (23)
(23)
FLL��·��Ƶ������FLL����ʽΪ
 (24)
(24)
PLL��·���ز���λ����������ʽ������ʾ��
 (25)
(25)
���� ��
��
�������ջ���̬R(t)������ʱ��T�Լ��Ѹ������ǵ�GDOPֵ����ij�ź������C/N0��������ֵ�����ķ�����������FLL��·��������Bf ��PLL��·��������Bp��������Bf��Bpʹ�æ�FLL��1/(12T)�Լ���PLL��15���������˵���������Ҫ�����ز���λ�������ޣ���֮������ز���λ�������ޣ������Բ�ͬ�ź�����ȵ�������з������Եõ��ز���λ��������ֵ��
3 ��ֵ�������
����2.2����2.3�ڵķ������������������Ǽ丨��ʱ���ز���λ�������ޣ��ز����ٻ�·����2��FLL��·����3��PLL��·�������������2��ʾ��
��ֵ��������ͼ3��4��ʾ����ͼ3��4��֪�����Ѹ�������GDOPΪ50��100ʱ�����Ǽ丨��������ز���������Ϊ23~25 dB�����������ʱ�ĸ�������Ҫ��7~13 dB����Ȼ�����Ǽ��źŸ������ջ���̬�õ��ܴ��ѹ�����ڸ߶�̬����£��ز���λ������������24 dB/Hz���ң����������õ��ϴ�������ͬʱ������Ҳ˵�����Ǽ��źŸ������Ѹ������ǵ�GDOPֵҪ�ߣ��Ѹ������ǵ�GDOPֵ�Ը�������Ӱ�첻��
��2 ��������ջ�����ز���
Table 2 Relevant parameters of satellite and receiver
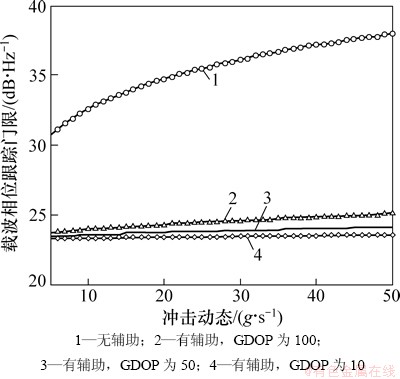
ͼ3 �������Ǽ��źŸ����µ��ز���λ��������
Fig. 3 Carrier phase tracking thresholds with/without inter-satellite signal assistance
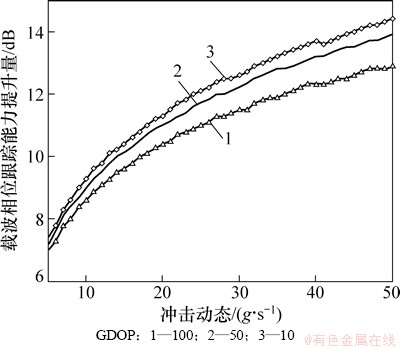
ͼ4 ���Ǽ��źŸ������ز���λ��������������
Fig. 4 Inter-satellite signal assisted enhancement of carrier phase tracking capacity
4 ����
(1) �����ջ����յ�4���������Dz�ʵ�ֳ�ʼ��λʱ�����Ը����Ѹ������ǵ���Ϣ�Լ���λ��Ϣ�������������źŵĽ��գ��Ҹ���������Ϊ�ɹۣ����������ֵ��źŶ�̬���ڸ߶�̬�����£��ز���λ���������½���24 dB���ң������������������������ǵ��ز���λ����������7~13 dB��
(2) �����������ָ��������ǿ���ǵ�ѡ����ԣ�ѡ������ǿ����ʱ��ֻ��Ҫ��֤���������ȫʱ�ο��Թ۲4�����Ϲ�����ǿ���Ǽ��ɣ���ʱ���Խ��ƴﵽ��ȫ����������ǿһ�������ܡ�
�ο����ף�
[1] �ɹ�ǿ, ���º�. �����붨λ-�ִ�ս���ı�����[M]. 2��. ����: ������ҵ������, 2000: 123-124.
GAN Guoqiang, QIU Zhihe. Navigation and position: The compass in modern war[M]. 2nd ed. Beijing: National Defence Industrial Press, 2000: 123-124.
[2] ������, ��ɺɺ. ��������ս��GPS�����뷴����[J]. ��������, 2004, 11(1): 18-21.
CHENG Libin, LI Shanshan. Analysis of GPS jamming and counter-jamming technique in Iraq War[J]. Electronics Optics and Control, 2004, 11(1): 18-21.
[3] ������. GPS����ϵͳ�ĵ��ӹ����Կ��о�����[J]. ������ӶԿ�, 2001(1): 5-11.
SUN Zhixin. The summarize of the electronic anti-jamming technology for GPS System[J]. Aerospace Electronic Warfare, 2001(1): 5-11.
[4] ̷��ԣ. ����ս�� GPS�ĵ��ӹ����Կ��о�[J]. ������ӶԿ�, 2001(1): 12-16.
TAN Xianyu. The sdudy of GPS anti-jamming in navigation war[J]. Aerospace Electronic Warfare, 2001(1): 12-16.
[5] Pike J. GPS III/GPS Block III[EB/OL] [2011-12-30]. http://www.globalsecurity.org/space/systems/gps_3.htm.
[6] Perz C M. GPS Modernization Update-Presentation at IEEE Plans[R]. Monterey: GPS Joint Program Office, 2004: 28.
[7] Fontana R, Latterman D. GPS Modernization and the future[C]//Proceedings of the IAIN World Congress and the 56th Annual Meeting of The Institute of Navigation. San Diego, CA: ION Publications, 2000: 222-231.
[8] ���. ��������ϵͳ������ǿ�����븲�Ƿ�Χ�о�[J]. ���ѧ��, 2011, 40(5): 80-84.
SUN Jin. Research on power-enhanced technology and coverage areas of global navigation satellites[J]. Act Geodaeticaet Cartographica Sinica, 2011, 40(5): 80-84.
[9] Progri I F, Michalson W R, Wang J, et al. Indoor geolocation using FCDMA pseudolites: Signal structure and performance analysis[J]. Navigation J Inst Nav, 2007, 54(3): 242-256.
[10] Progri I F. Wireless-enabled GPS indoor geolocation system[C]// Proceedings of Position Location and Navigation Symposium. CA, 2010: 526-538.
[11] Mohinder. Global positioning systems, inertial navigation, and integration[M]. 2nd ed. New York: Wiley-Interscience, 2001: 34-35.
[12] Ohlmeyer E J. Analysis of an ultra-tightly coupled GPS/INS system in jamming[C]//Proceedings of Position Location and Navigation Symposium. San Diego, CA: ION Publications, 2006: 44-53.
[13] Frank V D. A-GPS: Assisted GPS, GNSS and SBAS[M]. London: Artech House, 2009: 100-102.
[14] Etienne F. Integration of a GSM receiver with GPS for integrated navigation or for quick satellite signal acquisition[C]// Proceedings of ION GNSS. Long Beach, CA: ION publications, 2005: 1425-1432.
[15] Kaplan E D, Understanding GPS: Principles and applications[M]. Norwood: Artech House, 2005: 233-234.
(�༭ �Կ�)
�ո����ڣ�2013-05-11�������ڣ�2013-08-20
������Ŀ�������������˲�֧�ּƻ���Ŀ(NCET-08-D144)
ͨ�����ߣ�Ф־��(1986-)���У����Ϻ����ˣ���ʿ�о����������ǻ������붨λ�����о����绰��18684953087��E-mail��xiaozb1986@163.com
ժҪ����ƻ������Ǽ��źŸ����Ľ��ջ�ʵ�ֽṹ���ڴ˻�����ͨ�������Ƶ�����ֵ��������������Ǽ��źŸ���������ز���λ�������ޡ��о�����������������Ǽ��źŸ������ɻ��������ز����ٻ�·���ɽ��ջ��˶�����Ķ�̬���Ӷ���������·�Ķ�̬��Ӧ�ԡ��ڳ����̬Ϊ1~50g/s���������ǵ�GDOPֵ�ߴ�50�Ķ�������£��������Ǽ丨�������������ǵ��ز���λ��������Ϊ23~25 dB���������������½���7~13 dB����Ȼ���Ǽ��źŸ���������Ϊ�ɹۣ��ҶԸ������ǵ�GDOPֵҪ�ߡ���ˣ�ѡ������ǿ����ʱֻ��Ҫ��֤���������ȫʱ�ο��Թ۲4�����Ϲ�����ǿ���Ǽ��ɣ���ʱ���Խ��ƴﵽ��ȫ����������ǿһ�������ܡ�
[1] �ɹ�ǿ, ���º�. �����붨λ-�ִ�ս���ı�����[M]. 2��. ����: ������ҵ������, 2000: 123-124.
[2] ������, ��ɺɺ. ��������ս��GPS�����뷴����[J]. ��������, 2004, 11(1): 18-21.
[3] ������. GPS����ϵͳ�ĵ��ӹ����Կ��о�����[J]. ������ӶԿ�, 2001(1): 5-11.
[4] ̷��ԣ. ����ս�� GPS�ĵ��ӹ����Կ��о�[J]. ������ӶԿ�, 2001(1): 12-16.
[8] ���. ��������ϵͳ������ǿ�����븲�Ƿ�Χ�о�[J]. ���ѧ��, 2011, 40(5): 80-84.
[13] Frank V D. A-GPS: Assisted GPS, GNSS and SBAS[M]. London: Artech House, 2009: 100-102.
