
DOI: 10.11817/j.issn.1672-7207.2015.06.009
����dSPACE������˫��ģPMSM���Ʒ���
���ţ��������������
(������ҵ��ѧ �Զ���ѧԺ������ ������710072)
ժ Ҫ��
ģ���۵�����ͬ���������ϵͳ�����û�ģ���������洫ͳ��PID���������û�ģ�۲������洫ͳ��λ�ô���������ģ����������Դ�ͳ��ģ���ƵĶ������⣬������ģ�������ɵĸ�����һ���µĻ�ģ����������ģ�۲���ʹ���������ͺ������洫ͳ�Ŀ��غ�������Ч�ؼ��ٸ�Ƶ�����źţ���������ŵ���ȶ�����֤��ϵͳ���ȶ��ԡ�����Ʒ�����ַ��ӻ�ģ���Ƶ����ơ�ͨ��dSPACEʵ��ƽ̨����֤��ControlDesk������ʵʱ�۲⣬֤������Ƶ��µĻ�ģ����������������Ϳ����ŷ����������ڴ�ͳ�Ļ�ģ��������PID����������ģ�۲�����ȷ�ع۲�λ���źţ�������Ծ����������ŵij��ϣ����뿨�����˲�������Ч�ؼ����˸����źš�
�ؼ��ʣ�
����ͬ���������ģ��ṹ��SVPWM���������˲�����Ӳ��������dSPACE��
��ͼ����ţ�TM315 ���ױ�־�룺A ���±�ţ�1672-7207(2015)06-2036-08
New dual-sliding mode control method of PMSM based on dSPACE
GAO Ya, LIU Weiguo, LUO Guangzhao
(College of Automation, Northwestern Polytechnic University, Xi��an 710072, China)
Abstract: Based on the sliding mode theory, a new control system of permanent magnet synchronous motor was designed. It used a new sliding mode controller to replace the traditional one and PID one, and used the sliding mode observer to replace the position sensors. Aimed at the chattering question of conventional sliding mode controller, the concept of reaching law and quasi-sliding mode were introduced. In the designing processes of the sliding mode observer, using a continuous saturation function instead of the traditional switch function, high frequency noise signal was reduced. By dSPACE platform experimenting and ControlDesk real-time observing, the results show that the new sliding mode controller has a better effect for eliminating the chattering and the noise disturbed signal, and the position signal can be accurately observed by the sliding mode observer. Furthermore, Kalman filter controller is used in this control system for adapting to the noise disturbed area. According to the result, this design can decrease the noise signals effectively.
Key words: permanent magnet synchronous motor; sliding mode variable structure; space vector pulse width modulation (SVPWM); Kalman filter controller; hardware simulation; digital signal processing and control engineering (dSPACE)
����ͬ�����(PMSM)���нṹ�����С������С��Ч�ʺ��������ߡ�ת������С���ŵ㡣������PMSM��һ���������ǿ��ϡ������ԡ�������ĸ��Ӷ����ó���PID�����ڸ߾��ȿ��Ʒ������һ�����⣬���ܲ�����������Ӱ��Ƚϴ�ȡ����ִ���������ΪPMSM�Ŀ���������Ӧ���ơ�ģ������[1]����������ơ�³������[2]�ͻ�ģ��ṹ���Ƶ�[2-8]���˺ܴ�ٽ����á�����ģ��ṹ���ڶ�ϵͳ��ѧģ�͵ľ���Ҫ�ߣ���ϵͳ�����仯����绷���Ŷ��Լ��ڲ��㶯�Ⱦ�����ȫ������Ӧ�Ժͺ�ǿ��³���ԡ������㷨�����ڹ���ʵ�֡��ڽ�������ϵͳ����������ʾ�����õ�Ӧ��ǰ������PMSM�Ŀ����У�ʵʱ��ȷ��λ���źŵĻ�ö�������ϵͳ������������Ҫ��Ӱ�졣ͨ����λ���źŵļ����ͨ����װ�ڵ�����ϵĹ�����������������ȴ���������Ӳ���Ĵ��ڴ����ܶ����⣬������һЩ���ⳡ�ϣ�Ӳ���������İ�װ��ʵ�֡���ˣ���λ�ô�������Ϊһ����Ҫ���о����⡣ĿǰӦ�ñȽϹ㷺����λ�ô�������ⷽ����Ҫ�У�1) ���õ���ĵ�Ź�ϵ���������ѹ�뷴�綯�ƵĹ�ϵ��������ϵ����λ�á������ַ����Ե�������ر����У�����ת�ٽϵ�ʱ���㲻ȷ��2) ���ڸ�Ӧ�綯�ƵĹ۲������Ʒ����翨�����˲��۲����ͻ�ģ�۲�����[9-13]���������˲��۲����㷨���ӣ���Ҫ�����������㣬�������൱��ͬʱҪ�õ������������ͳ�Ʋ�������ͨ�������ĵ��Բ���ȷ�����ʵ������������ģ�۲�����ϵͳ�����仯����绷���Ŷ����ڲ��㶯�Ⱦ�����ȫ������Ӧ�ԣ���ϵͳ��ѧģ�;���Ҫ�ߣ���̬��Ӧ�죬���нϺõ�³���ԣ����ڹ���ʵ�֣�Ŀǰ�õ��˹㷺��Ӧ�á�3) ������ЧӦ�ĸ�Ƶ��ѹ�����ע�뷨[14]���÷�����Ȼ����Ӧ���ڽϿ����ٶȷ�Χ�ҵ���ʱҲ�ɵõ��ϺõĹ������������ڴ��ڶ���˲�����ʹ��ת��λ�ù�����ʱ���ͺӶ����¶�̬���ܱ��, ���Ҹ�Ƶ�źŵ�ע�������Ƶ�����������Ҫ�����Ӳ��֧�֡�Ϊ�ˣ������������һ�ֻ��ڻ�ģ���۵�����ͬ���������ϵͳ�����û�ģ����������PID���������û�ģ�۲������洫ͳ��λ�ô�����������������ŵ���ȶ�����֤����ϵͳ���ȶ��ԡ���Ʒ�����ַ����˻�ģ���Ƶ����ơ���ʵ����֤����ƵĻ�ģ�������Ŀ����������������ڴ�ͳ��PID����������ģ�۲�����ȷ�Ĺ۲�λ���źš�������Ծ����������ŵij��ϣ������˿������˲�������Ч�����˸����źš�
1 ���ڿ������˲��Ļ�ģ��ṹ����
1.1 �������˲�ԭ��
�������˲���(KFC)��ͨ��һ���㷨�ų����ܵ�������ţ������ϵͳ���ȵ�һ���ֶΡ�������״̬���̺͵��Ƶķ���������һ״̬�Ĺ���ֵ�͵�ǰ״̬�Ĺ۲�ֵ�Ƴ���ǰ״̬����ֵ���˲�����������������˲����źŵ�ƽ���Ժ�ʱ������û��Ҫ��[15]��
�������˲��Ĺ��̰���Ԥ����̺��¹��̡�Ԥ����̰���ʽ(1)����״̬����ֵ��ʽ(2)�������Э���
 (1)
(1)
 (2)
(2)
���¹��̰���ʽ(3)������������ʽ(4)���¹۲�ֵ��ʽ(5)�������Э���
 (3)
(3)
 (4)
(4)
 (5)
(5)
1.2 ���ڿ������˲���SVPWM��ģ���������
SVPWM(��ѹ�ռ�ʸ����������)������������������γɵ�8�ֿ���״̬ȥ��òο���ѹʸ������Ҫ������Բ�δų��������ص��ǿ��Լز�������ʵ�֣������ѹ�������ʸߣ����ش����㶨�Ͳ�������г��������
��ģ��ṹ������һ�ֲ��������ƣ���ӵ��һ��ʹϵͳ�ṹ��ʱ��仯�Ŀ������ԡ������ֿ������Կ�����ʹϵͳ��һ���������ع涨��״̬�켣��С���ȡ���Ƶ�ʵġ���ģ���˶�����ϵͳ�������˶��㵽���л���s(x)=0����ʱ������ֹ����һҪ���ȶ���Ҫ���л���s(x)������ ������
������
��ģ��ṹ����������ư����л�����s(x)��ȷ���Ϳ��ƺ���u�����[16]��
���ݻ�ģ��ṹԭ������ģ�ɴ�����������֤��״̬�ռ��κ�λ���˶���������ʱ���ڵ����л����Ҫ�����������ɿ�����Ч�ĸ����������еĶ�̬Ʒ�ʡ���������ָ��������Ϊ
 �����Цű�ʾϵͳ���˶��������л���s=0�����ʣ���ָ���������е�ָ�����Ϊ
�����Цű�ʾϵͳ���˶��������л���s=0�����ʣ���ָ���������е�ָ�����Ϊ �����п�֪�������������У������ٶ��ļ�С���㣬����������ʱ�����ʹ�����л�����ٶȺ�С�������˶���������ָ���������У����ڴ��ڿ����źţ����Ǵ��ڶ������������ñ��ͺ���sat(s)�����˷��ź���sgn(s)�����Ц�Ϊ���߽�㡱��
�����п�֪�������������У������ٶ��ļ�С���㣬����������ʱ�����ʹ�����л�����ٶȺ�С�������˶���������ָ���������У����ڴ��ڿ����źţ����Ǵ��ڶ������������ñ��ͺ���sat(s)�����˷��ź���sgn(s)�����Ц�Ϊ���߽�㡱��
 (6)
(6)
�����������ŵ��ٶȿ�������״̬���̺��������Ϊ��
 (7)
(7)
 (8)
(8)
���� ��C=1��A=
��C=1��A= ��B=
��B= ��u=
��u= ��w��vΪ��������źš�����л�������
��w��vΪ��������źš�����л�������
 (9)
(9)

 (10)
(10)
��ʽ(9)��ʽ(10)�����ϣ��õ����ƺ���iq��ͼ1��ʾΪ��ƵĻ��ڿ������˲�������ͬ�����˫��ģ���ƽṹ��ͼ��
 (11)
(11)
Ϊ��ʹϵͳ�����ȶ���Ҫ������������ŵ��(Lyapunov)����������ϵͳ���ȶ���֤��������������ŵ���� ���ȶ���Ҫ����ƵĻ�ģ���������ȶ���������������
���ȶ���Ҫ����ƵĻ�ģ���������ȶ���������������
����������ƵĻ�ģ�л�������
 (12)
(12)
���У��ţ�0��k��0����֪���ֵС���㣬����������ŵ���ȶ���Ҫ��
2 ��ģλ�ù۲��������
��������ͬ���������ѧģ�ͣ����SVPWM�ĵ��Ʒ�������ƵĻ��ڻ�ģ�۲���������ͬ�����ʸ�����ƽṹ��ͼ��ͼ1��ʾ�����й۲���������Ϊ���������µĦ��������Ķ��ӵ����Ͷ��ӵ�ѹ��
2.1 ��ģ�۲�����λ�ù���
����ͬ������ڦ������ྲֹ����ϵ�µ���ѧģ��Ϊ��
 (13)
(13)
 (14)
(14)
 (15)
(15)
ʽ�У� ��
�� ��
�� ��
�� �ֱ�Ϊ���������µĦ��������Ķ��ӵ����͵�ѹ��RSΪ���������裻LSΪ��������У�
�ֱ�Ϊ���������µĦ��������Ķ��ӵ����͵�ѹ��RSΪ���������裻LSΪ��������У� ��
�� �ֱ�Ϊ���������µĦ��������ķ��綯�ƣ�keΪ������ϵ������rΪ���ת�٣���Ϊ���ת��λ�ýǡ���ʽ(13)�ɼ�Ϊ
�ֱ�Ϊ���������µĦ��������ķ��綯�ƣ�keΪ������ϵ������rΪ���ת�٣���Ϊ���ת��λ�ýǡ���ʽ(13)�ɼ�Ϊ
 (16)
(16)
������������ͬ���������ѧģ�ͣ������Զ��ӵ���Ϊ״̬�����Ļ�ģ�۲��������б���ʽ�ɱ�ʾΪ
 (17)
(17)
ʽ�У� Ϊ���ӵ���i�Ĺ���ֵ��kwΪ��ģ�۲�������ϵ����
Ϊ���ӵ���i�Ĺ���ֵ��kwΪ��ģ�۲�������ϵ����
 (18)
(18)
Ϊ�˼�С���غ��������Ķ����������ı��ͺ��� ���濪�غ���
���濪�غ��� �����Ц�Ϊ����Ļ�ģ���߽�㡱��
�����Ц�Ϊ����Ļ�ģ���߽�㡱��
 (19)
(19)
ʽ(17)��д��
 (20)
(20)
���嶯̬���:
 (21)
(21)
��ʽ(20)��ȥʽ(16)��
 (22)
(22)
��������״̬�Ļ�ģ�棺
 (23)
(23)
ʹ���ڻ�ģ�������� ����ȷ����ƵĻ�ģ�۲��������ȶ��Ժ�������ʱ���ڵ�����ƵĻ�ģ���Ҫ��������ͬ���������ѧģ�ͣ�������ģ��Ϊ��
����ȷ����ƵĻ�ģ�۲��������ȶ��Ժ�������ʱ���ڵ�����ƵĻ�ģ���Ҫ��������ͬ���������ѧģ�ͣ�������ģ��Ϊ��
 (24)
(24)
�������ʽ(23)��ʽ(24)��
 (25)
(25)
����ʽ(16)��֪��e�к���λ�æ���Ϣ�������ڱ��ͺ���sat(er)�Ĵ��ڣ�ʹͨ��ʽ(25)����ķ�����e����һ���ĸ�Ƶ�źţ�����е�ͨ�˲���������ͨ�˲��ķ����Ʒ���Ϊ��
 (26)
(26)
ʽ�У���0Ϊ��ͨ�˲����Ľ�ֹ��Ƶ�ʡ�
��ʽ(14)��(15)��(26)�ɵ�λ�ù����ź�Ϊ
 (27)
(27)
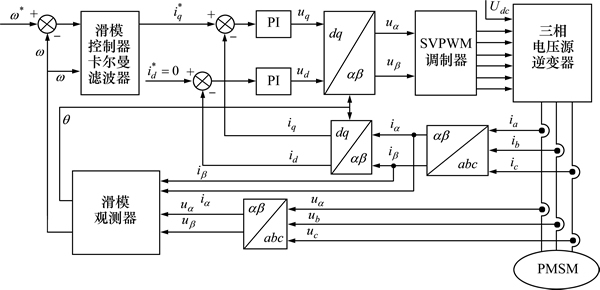
ͼ1 ���ڿ������˲���PMSM˫��ģ���ƽṹ��ͼ
Fig. 1 Dual-sliding mode control system of PMSM based on KFC
2.2 ������
���ڵ�ͨ�˲����Ĵ��ڣ��Ӷ�ʹ��������λ��ֵ��ʵ��λ��ֵ����һ������λ�������ͬ�Ľ�ֹƵ�ʺͲ�ͬ��ת���£���Ӧ��ͬ����λ�ת��Խ����λ��Խ�����DZ��Ľ���ֹƵ�����ó�1����ת��Ƶ����صı�������
 (28)
(28)
���ǣ���ʽ(28)�����ͨ�˲�������Ϊ
 (29)
(29)
����ʽ��֪���ڲ�ͬ��ת��Ƶ���£���ͨ�˲��������Ʋ��䣬��
 (30)
(30)
���У�k��ѡ����ݵ��ת����ȷ����һ����0~1֮�䡣ͼ2��ʾΪ��ƵĻ�ģ�۲���ģ�顣
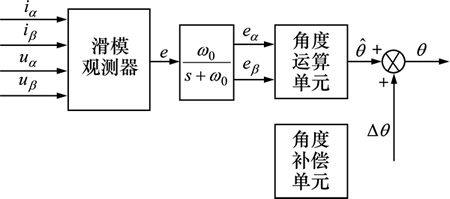
ͼ2 ��ģ�۲���ģ��
Fig. 2 Block diagram of sliding mode observer
3 �����ʵ����
������������Matlab����ƵĻ���SVPWM�Ĵ��п������˲��Ļ�ģ�������ͻ�ģ�۲��������˷��棬������Ч�Ժ�ȷ�Խ�������֤��Ȼ��ͨ��dSPACE(Digital signal processing and control engineering )ʵʱʵ��ƽ̨������ƵĿ������۲�������ʵ����֤��
dSPACEʵ��ƽ̨������Matlab/Simulink�����������ӿڣ�ControlDeskʵʱ����������һЩ�뱻�ض�����������ΧӲ����·��ͼ3��ʾΪdSPACEʵ��ƽ̨�Ľṹ��ͼ��
ʵ���е�����ͬ������IJ���Ϊ�����ѹU=160 V���ת��n=2 000 r/min��P=4��Rs=1.7 ����Ld=Lq=0.012 8 H��J=0.001 kg��m2����=0.002����f=0.148 8 Wb��
����ʱת������Ϊ700 r/min����������Ϊt =0 sʱTL=1 N��m, ��t =0.3 sʱTL=2 N��m. ͼ4��ʾΪ3�ֲ�ͬ���Ʒ����µ�ת�ٲ��Ρ����У���ͼ4���Կ�������ͳ�Ļ�ģ���ƶ���Ƚϴ���������0.3 s�����仯ʱ��PID���Ƶ��ٶ����߳������Ե�˲ʱ�������������ٶ�Ҳ�����ͺ��������Ͽ�֪���ڸ��ط����仯ʱ����ģ���Ʊ�PID���Ƶķ�����Ч���ã��ٶȸ�����Ҳǿ��PID���ơ������ǸĽ���Ļ�ģ���ƣ�����������������PID���ơ�
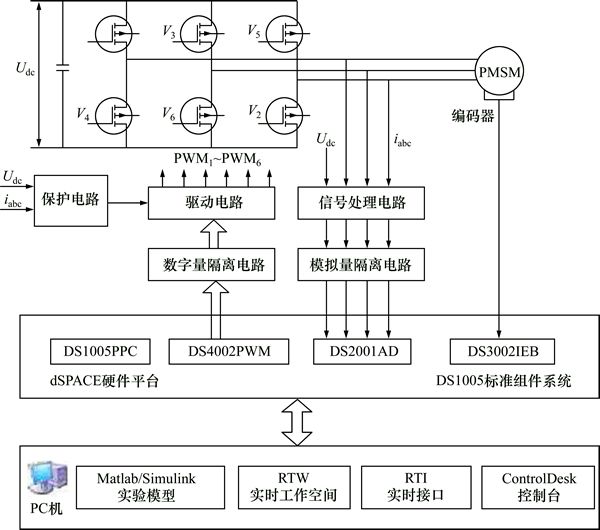
ͼ3 dSPACEʵ��ƽ̨�Ľṹ��ͼ
Fig. 3 Block diagram of dSPACE experimenting platform
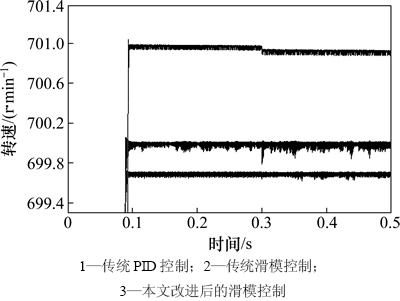
ͼ4 PID���������Ľ�ǰ��Ļ�ģ���������ٶ�����
Fig. 4 Speed of PID controller and sliding mode controller
���ھ����������ų��ϵĿ���ϵͳ�����ļ����˿������˲��������������Ž������˳�����������wΪ[-1.2��1.2]�ڵİ������źţ�vΪ[-0.3��0.3]�ڵİ������źţ��������˲��㷨��ȡQ=1��R=1��ͼ5(a)��ʾΪ����������δ���˲���ת�����ߣ����ߴ��ںܴ�ĸ����źţ�ͼ5(b)��ʾΪ�����������˲����ת�����ߣ����߱Ƚ�ƽ����û�м������������źţ�������ͼ5(a)��ȣ����ĸ��������Ժ���ͼ5(a)�����ߡ�
ͼ6(a)��ʾΪ���ݿ���ϵͳ����ѧģ�ͻ��ֵõ���λ��ֵ��ʵ��λ��ֵ�ıȽ����ߣ�ͼ6(b)��ʾΪ��ƵĻ�ģ�۲����۲��λ��ֵ��ʵ��λ��ֵ�ıȽ����ߣ�ͼ6(c)��(d)�ֱ�Ϊͼ6(a)��(b)ʵ�鿪ʼʱ�����߷Ŵ�ͼ6���Կ�������ƵĹ۲�������ȷ�ķ�Ӧʵ��ֵ�������ڿ�ʼ����ʱ����ģ�۲����ĸ�����������ͨ�Ļ�������
��ͬ�����������£�ͼ7(a)��ʾΪʵ��ʱ��SPWM���Ʒ���ʱ�ĵ������Σ�ͼ7(b)��ʾΪ����SVPWM���Ʒ���ʱ�ĵ������Ρ���ͼ7���Կ���������SVPWM���Ʒ���ʱ���������θ��ӽ������ң���ͬ�������£�������С��Ҳ����˵�����ʸ��ߣ�������SPWM���Ʒ���ʱ����������Ƚ����ԡ�������ʵ���з�������SPWM���Ʒ���ʱ�Ե����ʼλ�ù��Ƶ�ȷ��Ҫ�����Ա�SVPWM���Ʒ����ĸߡ�
ͼ8(a)��ʾΪ���ñ�����ƵĻ�ģ����������ʱ��ת�ٲ��Σ�ͼ8(b)��ʾΪʹ�ô�ͳ��PID����ʱת�ٲ��Ρ���ͼ8���Կ�����������ƵĻ�ģ�������Ŀ��������������ڴ�ͳ��PID��������������ʵ����PID�IJ����������ںܴ������ԣ���Ҫ����һ��ʱ�䲻�ϵؽ���У����
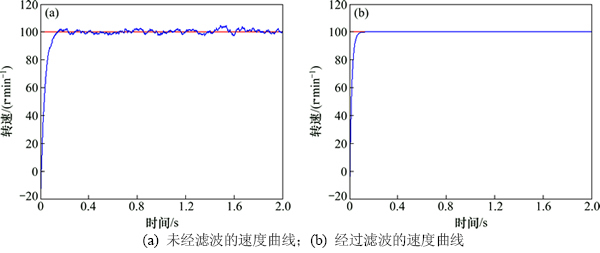
ͼ5 δ���˲��;����˲����ٶ�����
Fig. 5 Speeds of controller with KFC and without KFC
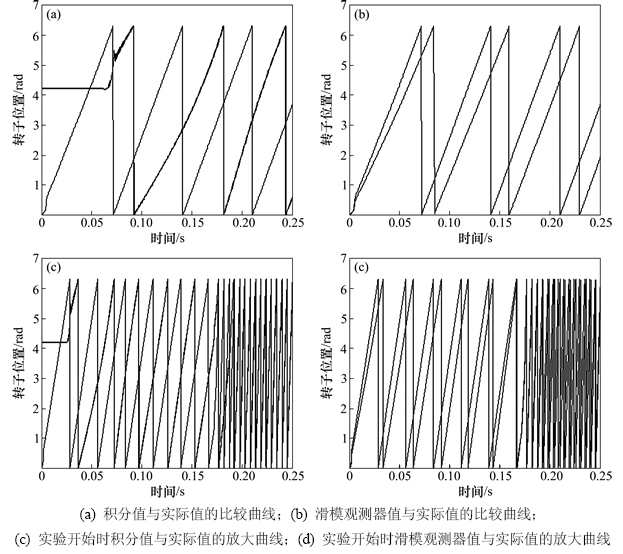
ͼ6 2�ֲ�ͬλ�ù۲���������ʵ��λ�����ߵıȽ�
Fig. 6 Comparisons of actual position curves and two observing result curves
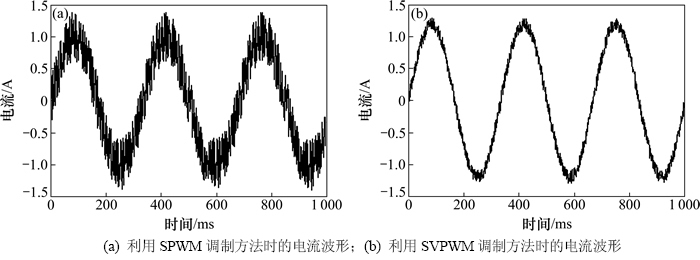
ͼ7 ����SPWM��SVPWM����ʱ�ĵ�������
Fig. 7 Current waveforms of controller when using SPWM and SVPWM method
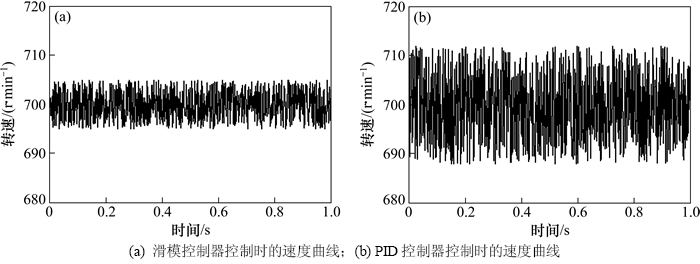
ͼ8 ��ģ����ʱ��PID����ʱ���ٶ�����
Fig. 8 Speed curves of sliding mode controller and PID controller
4 ����
1) �����һ�ֻ��ڻ�ģ���۵�����ͬ���������ϵͳ��������ģ�������ͻ�ģ�۲������ϣ���ͬ����������ͬ������Ŀ���ϵͳ�С�
2) ʹ�û�ģ�����������˴�ͳ��PID������������Դ�ͳ��ģ���ƴ��ڶ������⣬��ԭ�еĻ����Ͻ�����һ���Ľ�����ƵĻ�ģ�۲���ʹ���������ͺ������洫ͳ�Ŀ��غ�������Ч�ؼ����˸�Ƶ�����źš���������ŵ���ȶ�����֤����ϵͳ���ȶ��ԡ�
3) ������Ʒ�����ַ����˻�ģ���Ƶ����ơ�ͨ��dSPACEʵʱʵ��ƽ̨����֤����ControlDesk������ʵʱ�۲⣬֤��������Ƶ��µĻ�ģ����������������Ϳ����ŷ����������ڴ�ͳ�Ļ�ģ��������PID����������ģ�۲�����ȷ�ع۲�λ���źţ�������Ծ����������ŵij��ϣ������˿������˲�������Ч�����˸����źš�
�ο����ף�
[1] SHEN Yanxia, WU Dinghui, JI Zhicheng. Model reference fuzzy adaptive control of permanent magnet synchronous motor[C]//Proceeding of the Chinese Control Conference, 2006: 1522-1527.
[2] Zadeh M H, Yazdian A, Mohamadian M. Robust position control in DC motor by fuzzy sliding mode control[J]. Power Electronics, Electrical Drives, Automation and Motion, 2006, 23(26): 1413-1418.
[3] ������, �ܲ�, ��˹�. ����ͬ���������ϵͳ�Ļ�ģ����[J]. �繤����ѧ��, 2009, 24(9): 71-77.
WANG Haibo, ZHOU Bo, FANG Sichen. A PMSM sliding mode control system based on exponential reaching law[J]. Transactions of China Electrotechnical Society, 2009, 24(9): 71-77.
[4] Lai C K, Kuo K S. A novel motor drive design for incremental motion system via sliding-mode control method[J]. IEEE Trans on Industrial Electronics, 2005, 52(2): 499-507.
[5] ��ϣ, ������, �˿���, ��. ����ֱ��ͬ������Ĺ̶��߽�㻬ģ����[J]. �й��������ѧ��, 2006, 26(22): 115-121.
ZHANG Xi, CHEN Zongxiang, PAN Junmin, et al. Fixed boundary layer sliding mode control of permanent magnet linear synchronous motor[J]. Proceedings of the CSEE, 2006, 26(22): 115-121.
[6] Bandal V, Bandyopadhyay B, Kulkarni A M. Design of power system stabilizer using power rate reaching law based sliding mode control technique[C]//The 7th International Power Engineering Conference, IPEC 2005. 2005: 923-928.
[7] DING Kun. Active power factor correction using sliding mode control with reaching law[C]//Second IEEE Conference on Industrial Electronics and Applications. 2007: 1165-1167.
[8] ��˹�, �ܲ�, �ƼѼ�, ��. ��ģ��������ͬ���綯������ϵͳ[J]. �繤����ѧ��, 2008, 23(8): 29-35.
FANG Sichen, ZHOU Bo, HUANG Jiajia, et al. Sliding mode control for PMSM drive system[J]. Transactions of China Electrotechnical Society, 2008, 23(8): 29-35.
[9] Albert Q, WU Bin. Sensorless control of permanent magnet synchronous motor using extended Kalman filter[C]//Canadian Conference on Electrical and Computer. 2004: 1557-1562.
[10] Bolognani S, Tubiana L, Zigliotto M. Extended Kalman filter tuning in sensorless PMSM drives[J]. IEEE Transactions on Industry Applications, 2003, 39(6): 1741-1747.
[11] Francesco. Sensorless speed control of a PMSM based on sliding mode observer and extended kalman filter[C]//IEEE Industry Application Conference IAS. 2001: 533-540.
[12] Kang K L, et al. Sensorless control of PMSM in high speed range with iterative sliding mode observer[C]//IEEE Applied Power Electronics Conference and Exposition APEC. 2004: 1111-1116.
[13] Batzel T D, Lee K Y. Electric propulsion with sensorless permanent magnet synchronous motor: implementation and performance[J]. IEEE Trans on Energy Conversion, 2005, 20(3): 575-583.
[14] �ֺ�ƽ, ���濵. ���ڸ�Ƶע�뷨������ͬ���綯��ת�ӳ�ʼλ�ü���о�[J]. �й��������ѧ��, 2005, 25(15): 15-20.
JIA Hongping, HE Yikang. Study on inspection of the initial rotor position of a PMSM based on high-frequency signal injection[J]. Proceedings of the CSEE, 2005, 25(15): 15-20.
[15] ����Ԫ, �ź���, ���廪. �������˲�����ϵ���ԭ��[M]. ����: ������ҵ��ѧ������, 1998: 95-98.
QING Yongyuan, ZHANG Hongyue, WANG Shuhua. Kalman filter and integrated navigation principle[M]. Xi��an: Northwestern Polytechnical University Press, 1998: 95-98.
[16] ������. ��ģ��ṹ����MATLAB����[M]. ����: �廪��ѧ������, 2005: 62-70.
LIU Jinkun. Slinding mode variable structure control MATLAB Simulation[M]. Beijing: Tsinghua University Press, 2005: 62-70.
(�༭ �°���)
�ո����ڣ�2014-06-12�������ڣ�2014-08-13
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51177135)(Project (51177135) supported by the National Natural Science Foundation of China)
ͨ�����ߣ����ţ� ��ʿ�����µ��������о���E-mail��leave.999@163.com
ժҪ�����һ�ֻ��ڻ�ģ���۵�����ͬ���������ϵͳ�����û�ģ���������洫ͳ��PID���������û�ģ�۲������洫ͳ��λ�ô���������ģ����������Դ�ͳ��ģ���ƵĶ������⣬������ģ�������ɵĸ�����һ���µĻ�ģ����������ģ�۲���ʹ���������ͺ������洫ͳ�Ŀ��غ�������Ч�ؼ��ٸ�Ƶ�����źţ���������ŵ���ȶ�����֤��ϵͳ���ȶ��ԡ�����Ʒ�����ַ��ӻ�ģ���Ƶ����ơ�ͨ��dSPACEʵ��ƽ̨����֤��ControlDesk������ʵʱ�۲⣬֤������Ƶ��µĻ�ģ����������������Ϳ����ŷ����������ڴ�ͳ�Ļ�ģ��������PID����������ģ�۲�����ȷ�ع۲�λ���źţ�������Ծ����������ŵij��ϣ����뿨�����˲�������Ч�ؼ����˸����źš�
[3] ������, �ܲ�, ��˹�. ����ͬ���������ϵͳ�Ļ�ģ����[J]. �繤����ѧ��, 2009, 24(9): 71-77.
[5] ��ϣ, ������, �˿���, ��. ����ֱ��ͬ������Ĺ̶��߽�㻬ģ����[J]. �й��������ѧ��, 2006, 26(22): 115-121.
[8] ��˹�, �ܲ�, �ƼѼ�, ��. ��ģ��������ͬ���綯������ϵͳ[J]. �繤����ѧ��, 2008, 23(8): 29-35.
[14] �ֺ�ƽ, ���濵. ���ڸ�Ƶע�뷨������ͬ���綯��ת�ӳ�ʼλ�ü���о�[J]. �й��������ѧ��, 2005, 25(15): 15-20.
[15] ����Ԫ, �ź���, ���廪. �������˲�����ϵ���ԭ��[M]. ����: ������ҵ��ѧ������, 1998: 95-98.
[16] ������. ��ģ��ṹ����MATLAB����[M]. ����: �廪��ѧ������, 2005: 62-70.
