
������Ⱥ�Ż��㷨���첽���ģ�Ͳ�����ʶ
��һ��������������������أ�������
(ͬ�ô�ѧ ��������Ϣ����ѧԺ���Ϻ���200092)
ժ Ҫ��
ϵͳ���幤��ʵ���У�ʸ�������㷨����������첽�������ߡ�����Ӧ������������ģ������ѧģ�Ͳ�����ʸ�����ƽṹģ�;�����ȷ��ģ�Ͳ����Ż������ںܴ�̶�����Լϵͳ���ܵķ��ӡ����о����������ʸ�����Ʊ�Ƶ��Ӳ��ƽ̨��ͨ���˶���������IEC61131-3���Ա�̣���ɻ�����Ⱥ�Ż��㷨�ĵ���Ѱ�ţ����߱�ʶ��������ֱ��������ƶ�̬���Եĵ�Ч���ģ�Ͳ��������������ʵ����֤���������PSO�㷨�Թ���ϵͳCPU�������ٶ����ڴ���ԴҪ�ߣ��������ٶȽϿ죬����Ϊ���в�����ʶ���ܵ����油�䣬��������ʶ���������ֵ����߱��ʹ�·��Ƶ����ʶЧ�����ѵ����⡣
�ؼ��ʣ�
PSO���첽�����ʸ��������������ʶ��
��ͼ����ţ�TG146.2+1 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0148-06
Identification of model parameter of induction motor with particle swarm optimization method
QIU Yi-ming, LI Wen-qi, YANG Dong-sheng, WANG Lei, WU Qi-di
(School of Electronics and Information Engineering, Tongji University, Shanghai 200092, China)
Abstract: During the adjustment of an AC drive system with induction motor, the designer of the vector-control algorithm, the designer of induction motor and the engineer who makes the adjustment work separately. So in most cases, the equivalent model of the motor and the control structure of the inverter are unknown, which limits the performance of the system. In this paper a PSO algorithm was programmed with IEC61131-3 language in a motion controller to estimate the parameter for the model of motor & controller based on the hardware of a vector controlled inverter, in order to reach the similar dynamic performance as a DC motor. The PSO algorithm can be a kind of alternative approach of present parameter identification functions, for its requirements on the speed of CPU and volume of memory are low, while it converges quickly. It��s especially helpful for special motor, e.g. the motor with high saturation design.
Key words: PSO; induction motor; vector control; parameter identification
���������첽�������ṹ���ɿ����ص㣬��ȡ��ֱ���������Ϊ�߾��ȴ���ϵͳ������ѡ��Ϊ�����ֱ�����ϵͳ�����Ĵ������ԣ��ų�����ʸ�������㷨�õ��㷺Ӧ�á�ȷ�ĵ��ģ����ʸ�����ƽṹģ����ʵ�ָ����ܵ�ǰ�ᡣ���ڽ�����������ϵͳ���幤��ʵ���У�ʸ�������㷨���������������ߡ�����Ӧ������������ģ�ģ�Ͳ����Ż������ںܴ�̶�����Լϵͳ���ܵķ��ӡ��������۵��������ʶ���������ڴ����滷���жԵ����ѧģ�ͽ��б�ʶ���Ƚϲ�ͬ�ı�ʶ�����ı�ʶ���(��ʶֵ������ʶ�ٶ�)�����롰��ȷ�����������Ƚϣ�֤���㷨����Ч��[1]����ͨ���ڵ��Ͷ������ǰ����� ��ʩ�Ӳ�ͬ��ʽ�ĵ�ѹ�������źţ�������ĵ�ѹ�����������������ѧģ�ͣ��õ����㷨��ʶ���������ʹ֮�뱻����������ӽ��������Ӧ������봫ͳ�Ķ�ת�����ʵ�鷽����ӽ��ı�ʶ���[2]����Щ��������������Ƶ���ֿ������о����������ΪֻҪ�������ȷ�����ܱ�֤ʸ��������ѧģ����ȫ�������ʵ�ϣ���Ƶ���ڲ���ʸ�������㷨��νǧ����𣬶���������컷�����ֳ������ϻ����벻ȷ���IJ��죬����������ĵ��������ʶ������Ҫ�������ֳ���ɡ����о�ѡ�õ�ʸ�����Ʊ�Ƶ���������õ���Ż�������Ӧ����Ŀǰ��Ϊ����Ķ��ֵ��������ʶ���ۣ�����ʵ���Ҽ����Ӧ��ʵ������֤����������(���ڵ�����ͬ���о��д���ʵ���ҷ����ʶ��)���������ڹ���������Ʋ���(�����Ż������ij�ֵ)��ȷ�ԡ���·����Ӱ�켰��Ƶ������������ȵ����أ��ڹ��ڵ�һЩ�߾��ȿ�����ĿӦ���У���Ƶ�����õı�ʶ���ܱ�ò�ƥ�䡣���ڲ������ǿ��Ϲ�ϵ����ͨ�������Դղ�����ͨ�����Դﵽ���ŵĿ���Ч�����������������е���Ӳ�������ϣ�������Ⱥ�Ż��㷨��ͨ������Ѱ�ţ����߱�ʶ��������ֱ����������̬���Եĵ��������ʸ������ģ�Ͳ������Ա��ʸ�����Ʊ�Ƶ��ԭ�в�����ʶ���ܽ��в��䡣
1 ��������Ⱥ
��Ⱥ�Ż��㷨(PSO)[3-4]��һ�ֽ������㼼��(Evolutionary computation)��������Eberhart��Kennedy��ģ������Ѱ��ʳ����̶�������㷨�е�����������û����������������ӣ�����ͨ�����ٱ������ҵ�������λ��pbest������Ⱥ��Ŀǰ������λ��gbest�������Լ���λ�á�PSO���������ڼ����ס�ʵ�ֲ���û�����������Ҫ������
��PSO�㷨�Ľ�������Ϊ��
![]()
![]() (1)
(1)
![]() (2)
(2)
���У���Ϊ����Ȩ�أ�c1��c2Ϊ���ٳ�����rand1��rand2�ֱ�Ϊ2������0��1֮�����������±�i��ʾ��i������k(1��k��Dim)��ʾ���ĵ�kά��t��ʾ��t����pikbest(t)��ʾ��t����i��ʷ����λ�õĵ�kά������gkbest(t)��ʾ��Ⱥ��ʷ����λ�õĵ�kά���������⣬��![]() ��
��![]() ��������λ�úͷ����ٶȲ��ɳ�����߽硣
��������λ�úͷ����ٶȲ��ɳ�����߽硣
2 ��Ч���ģ�Ͳ���
����ʸ�����Ʊ�Ƶ��������õĵ����ѧģ���Ǹ����䣬Ϊ������������������[5]�е��첽�����d-q����ϵ�ϵĶ�̬��Ч��·����ͼ1��
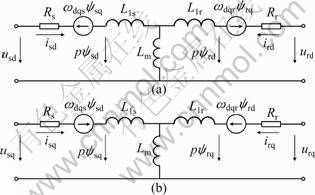
ͼ1 d-q ����ϵ�ϵ��첽�����̬��Ч��·
Fig.1 d-q coordinate system on dynamic equivalent circuit of induction motor
��d-q����ϵ�ϵĵ�ѹ���̣�
 (3)
(3)
���У�RsΪ���ӵ��裻RrΪת�ӵ��裻LlsΪ����©�У�LlrΪת��©�У�LsΪd-q����ϵ��Ч���ඨ��������ԸУ�Ls=Lls+Lm��LrΪdq����ϵ��Ч����ת��������ԸУ�Lr=Llr+Lm��LmΪͬ�ᶨ����ת�������Ļ��С�
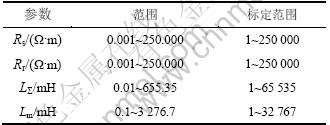
������[6]�еĵ��ģ�Ͳ��������У�����Lls=Llr��ȡL�� =Lls+Llr������Ҫ�ĵ�Ч���ģ�Ͳ�������1��
��1 ����ʶ�ĵ�Ч���ģ�Ͳ���
Table 1 Equivalent model motor parameters to be identified
3 Ŀ�꺯����ѡȡ
�ھ���Ĺ���Ӧ���У��Թ���ʵ�ֵ�Ҫ����ڶ����Ž�����κε����϶��Զ�����ϵͳ�������ڻ����˶�����ʽ��
![]() (4)
(4)
ֻ��ʵ������ȫ���1̨�����첽������������ֱ����������������ԣ���ˣ����Խ�1ֱ̨�����Ӧ���еļ���������Ϊϵͳ����ӦֵĿ�꺯����������������ʶ�����У���еϵͳ�Ĺ���Jû�б仯���Ҹߡ�������Ħ��ת��֮�������Ķת����ȿ��Ժ��ԣ�ͨ��ʩ�Ӹ���б���ٶ�(����ٶ�)�����������������������Ϊϵͳģ���ǽӽ���ȫ����ģ�����������ӽ����Ž⡣�������ʱ������ʶ���õ���������������Ա���ϵͳ����������
����1�� ��/���ٶε��ٶȸ���ƫ��ӦΪ��С��
 (5)
(5)
����2�����ٶȺ㶨���������ת��Ӧ�㶨(��ת�ض������Ŷ�)��ת�ز���Ӧ��С��
 (6)
(6)
����3������ת�������ת��֮��ӦΪĦ��ת�ص�2�������ֶ��趨������߱�ʶ���ȡ�
![]() (7)
(7)
����4����ת�ضμ��ٵ���Ӧ�㶨������Ӧ��С��
 (8)
(8)
�ۺ�����4������������˳���趨���ȼ����õ�����Ŀ�꺯����
![]() (9)
(9)
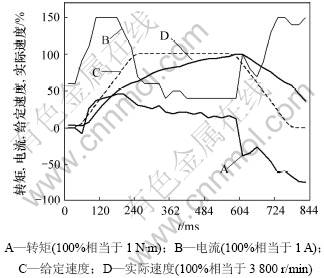
ͼ2��ʾΪ�õ���ڽ��Ų����µļӼ����������ߣ���ʱ��Ŀ�꺯��ֵ�ӽ�����С����
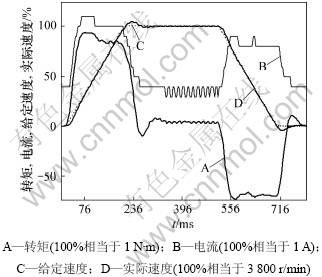
ͼ2 �Ӽ�������
Fig.2 Running curves
4 ��Ӳ�����Է���
ϵͳ�ṹ��ͼ3��ʾ��ͨ���˶���������IEC61131-3���Ա�̣���ɻ�����Ⱥ�Ż��㷨�ĵ������㡣
��λ��ͨ������Ethernet ��Modbus TCPͨѶ����ȡ����¼ÿ����ÿ�η�������ݣ�������������λ�á��ٶȡ���Ӧֵ��������ʷ���λ��(�ֲ����Ž�)��Ⱥ����ʷ���λ��(ȫ�����Ž�)����Ϣ����Ӧֵ�ļ�����PSO�����������̼�ͼ4��
��ʸ�����Ʊ�Ƶ�����첽�����ɵĴ���ϵͳ������ÿ�ε����������µ�������⼯�� ���ڴ˻����Ͻ�����Ӧ�Ŀ��ƽṹ�����Ż��� Ȼ���˶�����������ֵ�����һ�������ļ��١����١����ٹ��̣�ͬʱ��ʵʱת�١�ת�ء����������ݷ������˶���������
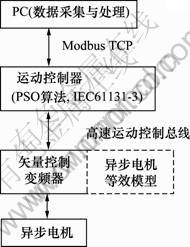
ͼ3 Ӳ��ϵͳ��ͼ
Fig.3 System structure of hardware
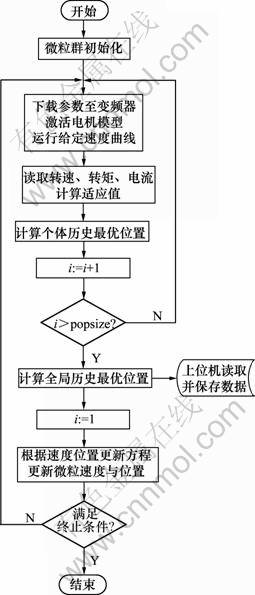
ͼ4 PSO�㷨����ͼ
Fig.4 Procedure of PSO
���ñ�Ƶ��ΪKEB��˾COMBIVERTϵ��ʸ�����Ʊ�Ƶ��09.F5.M1D-2BDA�����ֲ��ϸ������DZ�ʸ�������㷨��ͼ�������Ӧ��ʵ��Ҳ֤�������������ڶ��Ƶ��Ʒ��������ǰé��
ѡ���Ϻ��������������SVS�첽�ŷ���������Ʋ������£����ѹUrated=380 V�������Irated= 0.5 A���Ƶ��frated=50 Hz���ת��nrated=3 000 r/min����������cos ��=0.84�������Prated=0.18 kW��Ϊ��ߵ���������ԣ��õ����·��ƽӽ����ͣ�ͬʱ����������Ʋ�������ʵ�������ϴ�
5 ���߱�ʶ������������
ͨ����Ƶ���ڲ����ã�����������������Ϊ1.5 A���ȱ�֤�������ǡ��ʱ���ת��������ɼӡ����ٹ��̣��ֿɱ���������ʧ��ʱ����ɹ�������Ӳ����
�����У���ͨ�������Ƶ�����������Ż����ܣ�����ʩ�Ӳ�ͬ��ʽ�ĵ�ѹ��Ƶ���źţ�������ĵ�����ת�٣�ͨ�����ǵĹ�ϵ������������(���߲���ij��ģ������Ӧ����㷨��ʶ���������)������Ĺ������ں����ڲ����ܡ���ʶ������£�Rs=246.685 ??m��Rr=0.004 ??m��L��=148.26 mH��Lm=1615.7 mH��
���ڲ����ñ�Ƶ��������Ϊ12.6 A���ǵ���������10�����ϣ���С����״̬�£����������������ܵ�Ӱ�죬�Ӷ���ʶ����ƫ��ϴ�Ӧ�ô˱�ʶ���������Դ�ͨƫǿ���и��ٶ��ٶȸ��ٽϲ�� ͼ5��
ͼ5 �����Ż������������
Fig.5 Internal optimized running curves
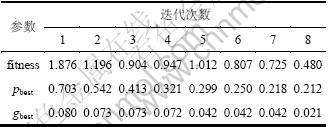
PSO�㷨��ѡ��30��������4���������Rs��Rr��L����Lm���е���Ѱ�š�ʵ�鹲������19�ε�����ÿ�ε���(������ʼֵ)����������Ӧֵ��ֵ������������Ӧֵ��ֵ��Ⱥ��������Ӧֵ�仯���Ƽ�ͼ6����ͼ6�ɼ����ӵ�9�ε�����ʼ����Ȼ����������Ӧֵ�ľ�ֵ��һ����С����Ⱥ��������Ӧֵ�仯��С�����ڵ������������ȵ�������������Ĵ��ڣ�����һ���ĵ�����û�й��̼�ֵ��ǰ8�ε�������Ӧֵ��ֵ����2����������Ⱥ�����λ��[40 530, 22 190, 168 250, 6 160]����Rs= 40.53 ??m��Rr=168.25 ??m��L��=221.9 mH��Lm=616 mH��
ͼ7��ʾΪӦ��PSOȺ�����Ž�ļӼ����������ߣ���ͼ5������������ȣ���̬���ܴ�Ϊ��ߣ��ɴﵽԤ�趨���ٶȡ�ת�ء�������Լ����������ֱ����������������3��ʾΪPSO��ʶ������Ƶ�����ù��ܱ�ʶ����ıȽϡ��������ñ�ʶ���ܸ����ʹ�õ�������ֵ���е������ܵ�������������Ӱ��ϴ�PSO�����㷨��ȻҲ�ܵ���������������Ӱ�죬�ӵ�9�ε�����ʼ��Ⱥ��������Ӧֵ�仯��С���������������Ŀ�꺯��ֱ��ȡ���䶯̬�������ԣ���ʱ������Ⱥ�����λ�ö�Ӧ�Ľ⼯����Ϊ��������ѽ⡱��
���Ż������У������߸��ٵ��������߿��������������ڡ���ʷ���λ�á�ʱ���䶯̬�ٶȸ����ת������������ֱ������������ֻ��ת�ؾ�����С��ȴ��ʤ�δ��������Ӧ�ã������Ƶ����ʸ�������㷨�е�Ч���ģ�͵���ƾ��нϸ�³���ԡ�
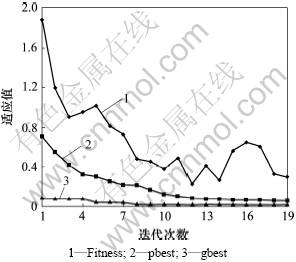
ͼ6 ����Ӧֵ��ֵPSO��������
Fig.6 Average fitness versus number of steps for PSO
��2 ǰ8��PSO��������Ӧֵ��ֵ
Table 2 Average fitness versus number of the first 8 steps for PSO

ͼ7 �Ӽ�������
Fig.7 Optimized running curve
��3 ��Ч���ģ�Ͳ�����ʶ����Ա�
Table 3 Comparison between internal function & PSO method.

6 ����
(1) ͨ������PSO�㷨����������Ƶ��ͳһ�������䣬��ʸ�������㷨�е�Ч���ģ�Ͳ������е�����ʶ��ʵ������ֱ���������Ķ�̬���ԡ����Ƶ���������Ż���ʶ������ȣ����첽������Ʋ����������̶Ƚ��ͣ���ͻ����2��ԭ�ȵ�����������������������С�ڱ�Ƶ����������1/3�����ͽϴ�ĵ������в���ֵ����ƫ��PSO�㷨����Ч�Եõ�����֤��
(2) ��ȻijЩ���������ʷ���λ��(�ֲ����Ž�)��Ⱥ����ʷ���λ��(ȫ�����Ž�)�������������ϵ����Ž⼯(��Ŀ�꺯�������й�)����������൱��Ĺ��̼�ֵ������㷨�Ż���Ŀ�꺯������������������ڹ���Ӧ��ʵ�����Խ϶̵��Ż�ʱ���ý��ŵġ�������ѽ⡱��
(3) ��Ϊ��ҵӦ�ò�Ʒ��ʸ�����Ʊ�Ƶ����ϵͳ���ܡ���⾫�ȡ��ȶ����밲ȫ�Զ����ڽϸ�ˮƽ��ΪӲ�������ṩ�˷��㡣�����ڴ˽��в��������Ż����ܸ�Ч�ʵ���ɱ�Ҫ�ı������Թ�����Ϊ����������о������һ�ֽ�Ϊ���еķ�����
�ο����ף�
[1] Picardi C, Rogano N. Parameter identification of induction motor based on particle swarm optimization[C]//Power Electronics, Electrical Drives, Automation and Motion. Taormina, Italy, 2006: 968-973.
[2] Karimi A, Choudhry M A, Feliachi A. PSO-based evolutionary optimization for parameter identification of an induction motor[C]//North American Power Symposium (NAPS). Las Cruces, USA: New Mexico State University, 2007: 659-664.
[3] Kennedy J, Eberhart R. Particle swarm optimization[C]// Proceedings of IEEE International Conference on Neural Networks. Perth, Australia, 1995: 1942-1948.
[4] ������, ����. ������Ⱥ�㷨�о���Ӧ��[M]. �Ͼ�: ���ս���������, 2005: 14-30.
WU Qi-di, WANG Lei. Intelligent particle swarm optimization algorithm research and application[M]. Nanjing: Jiangsu Education Publishing House, 2005: 14-30.
[5] �²�ʱ. �����϶��Զ�����ϵͳ[M]. �Ϻ�: �Ϻ���ҵ��ѧ��ҵ�Զ���ϵ, 1991: 309-314.
CHEN Bo-shi. Electric drive & automatic control system[M]. Shanghai: Shanghai University of Industrial. Department of Automation, 1991: 309-314.
[6] �¹�KEB��˾. Combivert F5-A, -E, -Hϵ�б�Ƶ��Ӧ���ֲ�: 4.0��[M]. �¹�, 2008: 172-182.
Karl E. Brinkmann GmbH. Application manual of Combivert F5-A, -E, -H 4.0[M]. Barntrup, Germany, 2008: 172-182.
(�༭ �²ӻ�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ����������ʿ�����������Ŀ(20100072110038)��������Ȼ��ѧ����������Ŀ(70871091��61075064��61034004, 61005090)
ͨ�����ߣ���һ��(1970-)���У����ճ����ˣ���ʿ�о��������������㷨�뽻������ϵͳ�о���Ӧ�ã��绰��13501981508��E-mail: 13501981508@139.com
ժҪ���ڽ�����������ϵͳ���幤��ʵ���У�ʸ�������㷨����������첽�������ߡ�����Ӧ������������ģ������ѧģ�Ͳ�����ʸ�����ƽṹģ�;�����ȷ��ģ�Ͳ����Ż������ںܴ�̶�����Լϵͳ���ܵķ��ӡ����о����������ʸ�����Ʊ�Ƶ��Ӳ��ƽ̨��ͨ���˶���������IEC61131-3���Ա�̣���ɻ�����Ⱥ�Ż��㷨�ĵ���Ѱ�ţ����߱�ʶ��������ֱ��������ƶ�̬���Եĵ�Ч���ģ�Ͳ��������������ʵ����֤���������PSO�㷨�Թ���ϵͳCPU�������ٶ����ڴ���ԴҪ�ߣ��������ٶȽϿ죬����Ϊ���в�����ʶ���ܵ����油�䣬��������ʶ���������ֵ����߱��ʹ�·��Ƶ����ʶЧ�����ѵ����⡣
