
����ADAMS��AMEsim���Ϸ������������ϵͳ
����1, 2������1�����پ�1��Ф����1�����1
(1. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083��
2. �㽭��ѧ ���嶯�������ϵͳ�����ص�ʵ���ң��㽭 ���ݣ�310027)
ժ Ҫ��
������������˲ɿ�ϵͳ�������Һ���������Ƶ�˫Һѹ����������ϵͳ������ADAMS��AMESim���Ϸ��淽��������ADAMS����������������ϵͳ�Ķ��嶯��ѧģ�ͣ�����AMESim������Һѹϵͳ�����ϵͳ��ģ���õ���ȷ��ϵͳģ�͡����ۺϿ����˴����ݺ�ҡ��Ӱ�죬��ȷ�ط������ݡ���ҡ����������ϵͳ�Ķ�̬���ԣ�Ϊʵ�������ϵͳ�ṩ�˼����ο���
�ؼ��ʣ�
����������ADAMS��AMESim�����Ϸ�����
��ͼ����ţ�TP391.9 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S2-0252-05
Heave compensation system based on co-simulation of ADAMS and AMESim
LI Yan1, 2, DAI Huan1, LIU Shao-jun1, XIAO Fang-qi1, LI Hui1
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. The State Key Laboratory of Fluid Power Transmission and Control, Zhejiang University, Hangzhou 310027, China)
Abstract: A kind of active heave compensation system which was controlled by electrohydraulic proportional direction valve was designed according to the requirement of 5 km deep sea poly-metallic mining system. Based on the modeling and simulation method of ADAMS and AMESim co-simulation technology, the dynamics model of heave compensation system was established using ADAMS and a hydraulic system and control system model was built using AMESim to complete the accurate model of the system. Considering the influence of the wave offering and hull, the simulation results offer reference of the technical development of active heave compensation system.
Key words: heave compensation; ADAMS; AMESim; co- simulation
�������������ķ�չ���������Դ��������������½����Դ���ս��ݽߣ����������ú�����Դ�ѳ�Ϊ����21���͵ı�Ȼѡ����Ŀǰ���о���Ӧ�÷����У����ڽϴ�ˮ��ĺ�����Դ�����������ɺ�����ҵ��ˮ�����������ɸ�ʽ��ҵϵͳ����ˮ����������ʽ�ɿ�ϵͳ�����У��ܺ��˵�Ӱ�죬�ɿ��������һ�����ź������������������������ܵ��������������ܵ�ƣ������ˣ�������ˮ��ҵ�ĺ�����ҵװ������������ϵͳ�Dz���ȱ�ٵ�һ����Ҫ����[1]��Ϊ�ˣ��������߲���AMESim��ADAMS��������������ϵͳ�����˻����硢Һϵͳ�����Ϸ��棬�Ա�Ϊ��ƽ̨�ĸĽ��ṩ�������ݺ�����ʵ��ƽ̨��
1 ��������ԭ��
���������ں�����ʱ�����Բ�����ҡ����ҡ����ҡ���ݵ����ᵴ������(����)6�����ɶȵ��˶�����ͼ1��ʾ����ҡ���ݵ��ͺᵴ����ͨ��������λ�������������Dzɿ��Դ�����ҡ����ҡ�������˶�����Ҫ�ݺ�ҡ��������������װ��������[2]��
��������IJ�����Ҫ�����ݺ�ҡ�˶������������˶��������֡��ݺ�ҡ�˶��������õ�������ܽṹ�����Բ����ɿ���ҡ�ͺ�ҡ�˶���ʹ���ϵͳ�����ܵ����������غɵ�Ӱ�졣�ݺ�ҡ�˶�����װ�������������ڻ���������ϵͳ���[3]��������ͨ������ϵͳ���ӵ��ɿ��ϣ����ƴ�������ת���������ҡ�������⣻������ڻ�ͨ���ڻ����ϵͳ���ӵ��������������࣬���ƴ��ĺ���ת���������ҡ�������⡣�����˶��IJ�����������������ϵ�2����������Һѹ��ʵ�֣�Һѹ��Ͳ�ײ�����������ܵ��ڻ��ϣ������˵ײ����������ϵͳ������ƽ̨�����ӡ�Һѹ��ͨ������������Һѹϵͳ�����������������
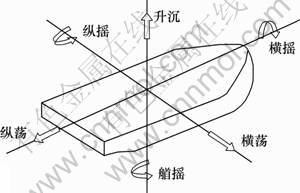
ͼ1 �ɿ��ں��������µ��˶�
Fig.1 Motion of ship under action of waves
������������ϵͳ�ɲ����ס���Һ������������������ɡ������������е����ص�������������ͨ�������ź����������ݽ��бȽϣ������Ƶ�Һ�������ķ��ڷ����ڴ�С[4-5]��������ֹ����ʱ��Һѹ���������ܵ���������������ʱ����������λ����Һ������ǻ��������Ͳ�����߶ȣ������½�ʱ����Һ��������������λ�����ǣ���Һͨ����Һ������ͨ�����и�ǻ���Ӷ�ʹ���ܻ����ϱ��־�ֹ������ʵ�����ܵ���������[6]��
2 ���Ϸ���ģ�͵Ľ���
2.1 ��������ϵͳ�������
���ݲɿ�ϵͳ������Ҫ���IJ���һ�ֵ�Һ���������Ƶ����������ܲ���ϵͳ�������������е����ص���������������������ϵͳ����������ϵͳ�Ĺ���ѹ��ȡ�������ܵ���������5 km���ϵͳ�ں�ˮ�еľ�̬�ܸ���ԼΪ5.2 MN��Ϊ�˲�ʹ�����ijߴ�����ϵͳѹ�����ߣ�ϵͳ����2�������ͬ��Һѹ��ͬ������ϵͳѹ��ȡΪ25 MPa��ÿ��������ʵ�ʸ���F=2.6 MN�����ݹ�ʽ
 ��
��![]() (1)
(1)
ͨ��������Բ���õ�d=250 mm�����ɹ�ʽ
![]() (2)
(2)
P0Ϊ��������ǻѹ�������ڽ����䣬ȡֵΪ0.1 MPa������Բ����ȡ2����Ͳ�ھ�Ϊ450 mm��������ֱ��Ϊ250 mm��Һѹ��2��Һѹ���ƻ�·��ȫһ�£�ÿ��Һѹ�ֱ���1����Һ���������ơ�
����Һѹ�ԳƲ������ڻ��ϣ��ص���������ֱ���Լ�����Ľ�����״[3]��������������ѡȡΪ45�Ÿ֣���ȫϵ��Ϊ3.5��ͨ�����������Ӧ��������Ӧ����ѡȡ�������ֱ����Ϊ500 mm����߳�Ϊ6 000 mm���ڻ��߳�Ϊ4 400 mm��
2.2 ADAMS��ģ
��������ADAMS/view��������ϵͳ������ѧģ�͡�����ADAMS����������λ������Ϊmm������Ϊkg����ΪN�����ݾ��弸�γߴ磬��1:1����������������ϵͳ����ģ�ͣ�����ģ����ڻ������������ᡢ2�������ס�����ƽ̨�����ܡ�����������һ��20 m�Ĺܵ��������������Ϊʵ��ϵͳ�е����ܵ����м�ֵ���������
������������ϵͳʵ�ʹ����������ṹ�ص㣬��ϵͳԼ�������������ã�Ϊ��ֹ��Լ������2���������2��������ֱ�����Ϊһ�塣������ֱ���ģ�����½ӣ�������ֱ�������ڻ��½ӣ�Һѹ��Ͳ���ڻ�����������ƽ̨����ý½Ӹ����ӣ������½Ӹ������ഹֱ��Һѹ�������Ͳ�����ӻ��Ƹ���ƽ̨�����ܵ�����ù̶������ӡ������˶�����Ϊ��λ�ƣ���������������������ҡ����ҡ3�������ϵ��˶�������
���������Ϸ�������У�ADAMS��Ҫ��AMESim�л�ȡҺѹ������������Ҫ����������Ը�Ͳ��λ�������AMESim���з������ݽ���������Ҫ��ADAMSģ���д�����������Ӧ����������� ��[7]�������������������������Ӧ����������� ��1��
��1 ADAMS���롢���������
Table 1 Input and output variables in ADAMS

2.3 AMESim��ģ
Һѹϵͳ�����ܶ�����ƽ̨�Ķ�̬��Ӧ�dz��ؼ�����ˣ��ڽ�ģʱΪ��֤���ȣ����û���Һרҵ��������AMESim��AMESim�ṩ��һ��ϵͳ������Ƶ�����ƽ̨��ʹ���û�������һ��ƽ̨�Ͻ������ӵĶ�ѧ������ϵͳ��ģ�ͣ����ڴ˻����Ͻ��з������������������������Һѹ�����ܹ�������ϸȷ�Ľ�ģ�����������õ���չ�ԡ���������ҺѹԪ���dz��ḻ����������Һѹ��·��ͬʱ���������л������з���Ŀ��Ʋ��������ԶԴ��Һѹ��·���нϾ�ȷ����[8]��
�����У���������ϵͳ��Һѹ��������Ϊ����Һѹϵͳ��������������ʵ��Һѹ��·���䴫�ݺ�������AMESim����ֱ�ӵ��ø���ҺѹԪ��ģ�飬�������ø���Ԫ���IJ���������Ԫ�����ӳ�������Һѹϵͳ���֡�Һѹϵͳ����Դ��Һѹ�ͱá����������������Һ��������Һѹ�ס��ܵ���ɣ���ͼ3��AMESim������ʾ��
���Ķ�Һѹ��·����PID���ơ�������ʵ�ʺ���ɿ��У�Һѹ�ĸ�Ͳ���ڴ��Ĵ��������ϡ��������˶�����������Ҳ������Һ�Ĵ���֮���������˶�����ˣ�����ѡȡ����������ڸ�Ͳ��λ����һ������Ϊ���Ʊ�����Ϊ������ƺ�����������������ϵͳ��ȫ��AMESim�����á����ڻ�������ƽ̨��������Ŀ��λ��Ϊ0����ˣ����Ʊ����������˶Ը�Ͳ�����λ�Ʊ�Ϊ��Ͳ�˶����෴����ͨ��һ���ջ�����ϵͳ������ƽ̨��λ�á�����ϵͳ����еϵͳ��Һѹϵͳ�����������Ӷ��������������ϵͳ���������ķ���ģ�͡�
2.4 ϵͳ���Ϸ���ģ��
����ʵ�ʵ���������ϵͳ�����Ϊ��е����ѧ���֡�Һѹϵͳ���֣����Ϸ���ԭ��ͼ��ͼ2��ʾ��2������ͨ�����������ź����ӣ�AMESimҺѹϵͳ��ÿһ���������ʱ���ڸ�����λ�����ٶ��źţ����ǣ����Լ����Һѹ����ǻ��ѹ����õ�Һѹ��������Ϊ�����źŽ��ж���ѧ���档��Ҫָ�����ǣ�����ѧģ������ķֱ��Ǹ���Ը�Ͳ������ٶ������λ�ơ�ͨ�����λ�Ƶķ�������PID�������������ڱ������ķ��ڴ�С���Ӷ�������Ͳ��ʵ��λ�ơ�
ͼ2 ���Ϸ���ԭ��ͼ
Fig.2 Schematic of co-simulation
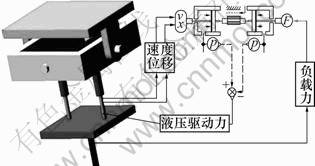
��ADAMS�����е�Controlģ������ADAMS��AMESim�����Ϸ���ģ�飬��AMESim�����IJ�ͼģʽ�½����Ϸ���ģ����룬�Ӷ���AMESim�����н����ܽ������Ϸ������������ģ�͡��������Ϸ���ͼ��ͼ3��

ͼ3 �������Ϸ���ͼ
Fig.3 Co-simulation of single cylinder
����ADAMSģ����AMESim�е�λ���ò�ͬ���������ɱ�������Э��2������֮�����ֵ��ϵ����Submodelģʽ�¶Է���ģ���е�ÿһ��ͼ��ѡ����ʵ�ģ�ͣ�����Parameterģʽ�·ֱ����������IJ���ֵ��Ȼ���л�������ģʽ�¼��ɽ��з��������
3 �������
���ļ����������£��ɿ�������ֵ��Ϊ360 mm������Ϊ5.8 s���ݡ���ҡת�Ƿ�ֵ��Ϊ2�㣬���ڷֱ�Ϊ5.8 s��11.6 s[2, 9]���������Ϸ�������ͨѶ���0.01 s����½������Ϸ��棬��������ͼ4��ʾ��

ͼ4 ��г�������µ���Ӧ
Fig.4 Response of simple harmonic wave
����PID��������ȡ��������Kp=2.3����������Ki=2.2��������Kd=0.5ʱ������Ч����Ϊ���⣬ƽ̨������ֵ��Ϊ29.04 mm�������ʴﵽ��91.93%����Ч��С�������˶���ϵͳ��Ӱ�졣���Ǵӷ�������֪��ϵͳ���ƴ����ͺ�ͬʱ�ڴ����½������У�ƽ̨��������һ���������������̲����Ǻ�ƽ�ȡ����������ݺ�ҡδ����ȫ�������Ӷ��������������һ����Ӱ�죬���ǣ�Ӱ�첢���Ǻܴ�ҡ��Ӧ��ͼ5����ҡ��Ӧ��ͼ6��

ͼ5 ��ҡ��Ӧ
Fig.5 Rolling response

ͼ6 ��ҡ��Ӧ
Fig.6 Pitching response
��ͼ5��ͼ6��֪����ҡ����Ч�����Ժ�����ҡЧ��������������Ϊ˫�ײ��ã������ö�����ܵIJ���Ч������Ӱ�졣��ˣ�����һ���ķ����У����߽���һ�������ݺ�ҡ������������Ӱ�졣�ܵ���˵������ܻ�������һ���IJ������ã������Ǻ�ҡ�������˱Ƚ����Ե�Ч����
4 ����
���5 km��ɿ�ϵͳ�����˫Һѹ����������ϵͳ��������ϵͳ�����Ϸ���ģ�͡������Ϸ���ģ���ж��ļ���������ģ�⣬ѡȡ�˺�����ϵͳ�������ڼ�г�������£�ϵͳ�����������ʴﵽ��91.93%����Ч��С�˽����غɶ�ϵͳ��Ӱ�졣ADAMS��AMESim���ϵ��������������ڴ�����Ļ���Һһ�廯ϵͳ�����Է��Ӹ�����ƽ̨�����ƣ��ֱ���������ϵͳ��ģ�ͣ���ͨ�����Ϸ��������Ӹ�����ѹ��ܣ��˷��˵�һ����ƽ̨��������ϵͳģ�͵����ѣ��������˽�ģ��Ч�ʣ�����ʵ�ֲ����Եõ���Ϊ��ʵȷ�ķ�������
�ο����ף�
[1] ����, �ν���, ���پ�. ���Դ���ɼ������о���״[J]. ��ɽ��е, 2004(9): 6-9.
L? Dong, HE Jiang-san, LIU Shao-jun. Current study status of exploiting technology to deep-ocean resource[J]. Mining & Processing Equipment, 2004(9): 6-9.
[2] ������. ����ʯ�����װ����ṹ[M]. ����: ʯ��ҵ������, 1990.
FANG Hua-can. Offshore oil drilling and production equipment and structure[M]. Beijing: Petroleum Industry Press, 1990.
[3] McNary J F, Person A, Ozudogru Y H. A 7500-ton-capacity shipboard completely gimbaled and heave compensated platform[J]. Journal of Petroleum Technology, 1977, 29(4): 439-448.
[4] Kirstein H. Active heave compensation system on board of vessels and offshore rigs[J]. Marine Technology Dusseldorf, 1986, 17(2): 59-61.
[5] Korde U A. Active heave compensation on drill-ships in irregular waves[J]. Ocean Engineering, 1998, 25(7): 541-561.
[6] Ф���, ��ٺ�, ���һ�. ��������������������ϵͳ�����������о�[J]. ������Һѹ, 2002(6): 47-50.
XIAO Ti-bing,WU Bai-hai, LUO Zhong-hui. Research on design and simulation of active heave compensation system of heavy lifting mine pipeline[J]. Machine Tool & Hydraulics, 2002(6): 47-50.
[7] ��, ���پ�, ��С��. ��ɿ��������ϵͳ��ģ�������о�[J]. ���������, 2010, 27(5): 247-251.
NI Jia, LIU Shao-jun, LI Xiao-fei. Modeling and simulation research on passive heave compensation system for deep sea mining[J]. Computer Simulation, 2010, 27(5): 247-251.
[8] ��ΰ, ����, л����, ��. ����AMESim��Һѹ����������ģ��������Է���[J]. �㽭��ѧѧ��: ��ѧ��, 2007, 41(11): 1875-1880.
WANG Wei, FU Xin, XIE Hai-bo, et al. Modeling of AMESim based hydraulic parallel mechanism and simulation of its coupling characteristics[J]. Journal of Zhejiang University: Engineering Science, 2007, 41(11): 1875-1880.
[9] Jan L, Anders B. Wave-included motion on a four-column semi-submersible obtained from model tests[C]//Proceedings of the 14th Annual Offshore Technology Conference. Houston, Texas, 1982: 759-763.
(�༭ �²ӻ�)
�ո����ڣ�2011-06-15�������ڣ�2011-07-15
������Ŀ���㽭��ѧ���嶯�������ϵͳ�����ص�ʵ���ҿ��Ż���������Ŀ(GZKF-201001)�����ʺ��������о�������ʮһ�塱��Ŀ(DYXM-115-04-02-01)
ͨ�����ߣ�����(1975-)��Ů�����������ˣ���ʿ�������ڣ����»���Һϵͳ���������뼼�������ҵװ���������ƣ��绰��13677353895��E-mail: lylsjhome@163.com
ժҪ�����5 km�й�����������˲ɿ�ϵͳ�������Һ���������Ƶ�˫Һѹ����������ϵͳ������ADAMS��AMESim���Ϸ��淽��������ADAMS����������������ϵͳ�Ķ��嶯��ѧģ�ͣ�����AMESim������Һѹϵͳ�����ϵͳ��ģ���õ���ȷ��ϵͳģ�͡����ۺϿ����˴����ݺ�ҡ��Ӱ�죬��ȷ�ط������ݡ���ҡ����������ϵͳ�Ķ�̬���ԣ�Ϊʵ�������ϵͳ�ṩ�˼����ο���
