
DOI: 10.11817/j.issn.1672-7207.2019.03.008
�����ʽҺѹ��ƽ�����Ķ���ѧ����
����÷1���콨��2����ʯ��2
(1. ����ʦ����ѧ ���������ѧԺ������ ��ɳ��410081��
2. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
ʽҺѹ��ƽ�����ľ��������͵�ƽ�����ȶ���ѧ���ܣ��Ծ�����������ƽ���Ĺ���ƽ̨��ŷ�����ֱ���ʽ�ͱ�ֱ���ʽ���и�д�������������շ�������ƽ�����Ķ���ѧ��ѧģ�ͣ�����̰������ø���ʸ�������������������ٶȷ��̡��Ƶ���ƽ�����Ķ��ܷ��̡������鹦ԭ���Ƶ���ƽ�����Ĺ��������̡��Ƶ���Һѹ���������Ķ���ѧ�����⡣����MATLAB������������ѧģ�ͽ��й���ʵ�����棬������ͬ������3��Һѹ�������������Է���������������֤���о�����������Զ�Һѹ���������ʹӶ�Һѹ������������Һѹ����������ȶԸ��ر仯�����У��Զ�Һѹ���������ʹӶ�Һѹ������������Դ�С�����ߵĸ�Ͳ�ھ��ͻ�����ֱ���������������ĸ�Һѹ���������Ľ�����ȿ����ڹ�����Ƽ���ͷ�����Ҳ�����ڻ����Ż���ơ�
�ؼ��ʣ�
��ƽ����������ѧ�������������շ����������MATLAB������
��ͼ����ţ�TH112 ���ױ�־�룺A ���±�ţ�1672-7207(2019)03-0557-07
Dynamic characteristic of hydraulic leveling mechanism with a hybrid kinematic chain
KANG Huimei1, ZHU Jianxin2, WANG Shilin2
(1. School of Engineering and Design, Hunan Normal University, Changsha 410081, China;
2. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: To research the dynamic performance of the hydraulic leveling mechanism with a hybrid kinematic chain, such as lifting capacity and leveling ability, a dynamic mathematical model was established based on the Lagrange approach after rewriting the differential expression and the variational expression for the Euler angle of the working platform in the lifting process. The process were as follows: the complex vector method was used to establish the mass center velocity equations of the rigid bodies; the kinetic energy equation of the leveling mechanism was derived; the generalized force equations of the leveling mechanism were derived based on the principle of virtual work, and the dynamic analytical solutions of the driving forces of each hydraulic cylinder were deduced. The MATLAB software was used to simulate the mathematical model, and the driving forces of three hydraulic cylinders under different loads were analyzed. The simulation results were tested and verified by experiments. The results show that both loads of automatic hydraulic cylinder and driven hydraulic cylinder are more sensitive than the load of luffing hydraulic cylinder when different loads are applied in the working platform. The relative size of the load of automatic hydraulic cylinder and that of the driven hydraulic cylinder is determined by the diameters of the non-rod chamber and the piston rod. The analytic solutions of the loads of hydraulic cylinders can be used both in engineering design calculation and mechanism optimization design.
Key words: leveling mechanism; dynamic analysis; Lagrange approach; hybrid kinematic chain; MATLAB software
Һѹ��ƽ�����ǹ㷺Ӧ���ڵ�����ͨ�š�����������������ĸ߿���ҵ��е[1]����ҪӦ������������������۲�װ��[2]�ؼ�����������Ҫ�������ھ����˻������ͬʱ��֤���˻�����Ĺ���ƽ̨��ˮƽ������������͵�ƽ����ֱ�Ӿ����������İ�ȫ�ԡ���ȷ�ԡ�������Ӧ�Եȹ������ܡ����ݲ�ͬ���˶�����Һѹ��ƽ������Ϊ����ʽ[3]�ͻ����ʽ[4]��2�֣����л����ʽҺѹ��ƽ����(���Ϊ��ƽ����)�����ṩ���õ��˶�ѧ�Ͷ���ѧ���ܶ���ù㷺Ӧ�á���ƽ�����ľ����͵�ƽ����ֱ��ȡ���ڸ�Һѹ������������ʯ�ֵ�[5-6]����ţ�١�ŷ���������˵�ƽ��������ѧģ�ͣ�����MATLAB�����Ը��������������˷���������ƺ���[7-9]����ADAMS���������˵�ƽ�����Ķ���ѧ����ģ�ͣ��Ը��������������˷������������2�ַ�����ֻ�ܻ�ø�Һѹ������������ֵ�⣬Ϊ���Ƶ�������⣬��������������շ����ж���ѧ��ѧ��ģ��Ŀǰ�������������շ��Ļ�������ѧ��ģ�������Ҫ�����ڱ�������[10-13]�Ϳ�������[14-15]�����棬����Ի�����������еĶ���ѧ��ģ��������١�Ϊ�˻�õ�ƽ������Һѹ���������Ľ����⣬�����ڹ�����Ƽ���ͷ����Լ���һ���Ի��������Ż���ƣ������������������շ�������ƽ�����Ķ���ѧ��ѧģ�ͣ��Ƶ���Һѹ���������Ľ����⣬����MATLAB�������й���ʵ������������������������жԱ���֤��
1 ��ƽ�����Ľṹ��ɼ�����ԭ��
��ƽ������1����5��������ɵ����ɶ�Ϊ2�Ļ�������ʾ��ͼ��ͼ1��ʾ�����ܺͱۼܹ���1���������������еıۼ�����ҡ�ˡ����ˡ�����ƽ̨һ��1����������������5������һ��1�����ɶ�Ϊ2�Ļ������˻�����2��ԭ�����ֱ�Ϊ�ۼܺ�ҡ�ˡ���ƽ��������ԭ�����£��ۼ��ڱ��Һѹ����������O��ת��������ҡ�ˡ����˺���ƽ̨һ��ת����ʵ�ֹ���ƽ̨��������װ�ڱۼܺ�ҡ��֮��ĴӶ�Һѹ����������ҡ����A��ڶ���ͨ�����˴�������ƽ̨ת����ʹ����ƽ̨��ƽ�����ۼ�ת���Ե��ڹ���ƽ̨�߶�ʱ������ƽ̨ˮƽ�ǶȽ���֮�ı䡣��ˣ��ھ��������У�Ϊ�˱��ֹ���ƽ̨��ˮƽ���ڻ��ܺͱۼ�֮�䰲װ1���Զ�Һѹ�ף��Զ�Һѹ�ʹӶ�Һѹ����ǻ����ǻ�������и�ǻ���и�ǻ�������γ�2�����Һѹ��·�����ۼ��ڱ��Һѹ����������O����ʱ�뷽����תʱ���Զ�Һѹ�������쳤�����и�ǻ��Һѹ�ͱ�ѹ�����Ӷ�Һѹ���и�ǻ�У��Ӷ�Һѹ����ѹ���أ�ͨ��ҡ�ˡ����˴�������ƽ̨��D��˳ʱ�뷽����ת���Զ����ڹ���ƽ̨��ˮƽ״̬���Ӷ���֤����ƽ̨��ˮƽ��

ͼ1 ��ƽ�����Ľṹʾ��ͼ
Fig. 1 Schematic figure of structure of hydraulic leveling mechanism
2 ��ƽ��������ѧ��ѧģ�͵Ľ���
��ƽ������һ������ʽ������Ⱦ��������ԡ�Ϊ�˱��ֹ���ƽ̨��ˮƽ���ھ��������й���ƽ̨����ƽ��������ƽ̨��ŷ����ʼ�ձ���Ϊijһ��ֵ�������������շ���������ѧģ��ʱ����Ը��˶�������ŷ���ǽ����ֺͱ�ּ��㡣����ƽ̨ŷ����Ϊ��ֵ�����ֺͱ�־�����0����Զ���ѧ��ģ��������2�������Ӱ�죺1) ����ƽ̨ŷ���ǵ��ֵ���0�����¹���ƽ̨����֮�����ϵ����غɵĶ��ܶԸ�Һѹ����������Ӱ������ȷ���㣻2) ����ƽ̨ŷ���ǵı�ֵ���0�����¹���ƽ̨����֮�����ϵ����غ������Ը�Һѹ����������Ӱ������ȷ���㡣��ƽ�����ھ��������У�����ƽ̨ŷ����Ϊ��ֵ�����ӻ������˶������������ó�ֵ��2��ԭ������ͬ���õĽ������ˣ�Ϊ����ȷ������ƽ�����Ķ���ѧ��ѧģ�ͣ�������ƽ̨ŷ���ǵ��ֺͱ�ֱַ��дΪ2������������ֺͱ�ֵĺ�����
2.1 �����������ٶȷ��̵Ľ���
��ƽ���������ɶ�Ϊ2���ֱ�ѡȡ�ۼܺ�ˮƽ��֮��ļнǦ�(��Ϊ�ۼ�ת��)�Լ�ҡ�˺ͱۼ�֮��ļнǦ�(��Ϊҡ��ת��)Ϊ�������ꡣ�ۼܡ�ҡ�ˡ����˺���ƽ̨һ��1�����ʸ�������ABCD(��ͼ2)���ɵ�
 (1)
(1)
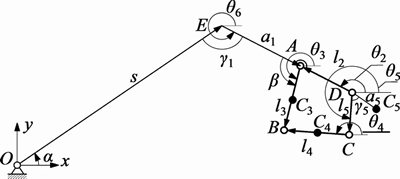
ͼ2 ��ƽ������ʸ��ʾ��ͼ
Fig. 2 Schematic figure of vectors of hydraulic leveling mechanism
ʽ�У�l2��l3��l4��l5�ֱ�Ϊ��AD��AB��BC��CD�ij��ȣ� ��
�� ��
�� ��
�� �ֱ�Ϊ��AD��AB��BC��CD��ʸ����λ�ǣ�iΪ������λ��
�ֱ�Ϊ��AD��AB��BC��CD��ʸ����λ�ǣ�iΪ������λ��
�Ե�ƽ���������˶�ѧ����[16]�ɷֱ����ҡ������C3����������C4����ƽ̨����C5���ٶȣ�
 (2)
(2)
 (3)
(3)
 (4)
(4)
ʽ�У�s��a1�ֱ�Ϊ��OE��AE�ij��ȣ�a5Ϊ�µ�D������ƽ̨����C5�ľ��룻 ��
�� ��
�� ��
��
2.2 ��ƽ�������ܷ��̵Ľ���
��ƽ��������4������������˱ۼ��ƶ���ת���⣬����3�������(ҡ�ˡ����˺���ƽ̨)����ƽ���˶�����ƽ�����Ķ���TΪ

 (5)
(5)
ʽ�У�J0Ϊ�ۼ��ƶ���O��ת�������� ��
�� ��
�� �ֱ�Ϊҡ�ˡ����˺���ƽ̨�����������ת��������m3��m4��m5�ֱ�Ϊҡ�ˡ����˺���ƽ̨��������
�ֱ�Ϊҡ�ˡ����˺���ƽ̨�����������ת��������m3��m4��m5�ֱ�Ϊҡ�ˡ����˺���ƽ̨�������� ��
�� ��
�� ��
�� �ֱ�Ϊ�Ƕ�
�ֱ�Ϊ�Ƕ� �������Ľ��ٶȡ�
�������Ľ��ٶȡ�
��ʽ(2)~(4)�ֱ������� ��
�� ��
�� ���������ʽ(5)���ɽ���ƽ�����Ķ��ܻ���Ϊ2������������ͦµĺ�������ʽ��
���������ʽ(5)���ɽ���ƽ�����Ķ��ܻ���Ϊ2������������ͦµĺ�������ʽ��
 (6)
(6)
ʽ�У�









 (7)
(7)






 (8)
(8)


 (9)
(9)
2.3 ���������̵��Ƶ�
��ƽ�������������ͼ3��ʾ��
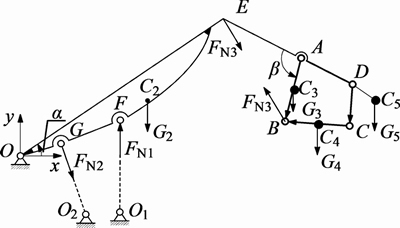
ͼ3 ��ƽ��������ͼ
Fig. 3 Diagram of mechanical analysis of hydraulic leveling mechanism
��ƽ��������������������Ӧ����λ���������鹦�ĺ�Ϊ


 (10)
(10)
ʽ�У� Ϊ���Һѹ����������
Ϊ���Һѹ���������� Ϊ�Զ�Һѹ����������
Ϊ�Զ�Һѹ���������� Ϊ�Ӷ�Һѹ����������h1��h2��h3��h4�ֱ�Ϊ�µ�O����FN1��FN2��FN3��G2�����ۣ�
Ϊ�Ӷ�Һѹ����������h1��h2��h3��h4�ֱ�Ϊ�µ�O����FN1��FN2��FN3��G2�����ۣ� Ϊ�Ƕ��ı�֣�
Ϊ�Ƕ��ı�֣� ��
�� ΪB��ֱ���x������y���������xB��yB�ı�֣�
ΪB��ֱ���x������y���������xB��yB�ı�֣� ��
�� ��
�� �ֱ�Ϊ����C3��C4��C5��y���������yC3��yC4��yC5�ı�֣�
�ֱ�Ϊ����C3��C4��C5��y���������yC3��yC4��yC5�ı�֣� ��
�� �ֱ�Ϊ
�ֱ�Ϊ ��x��y����ķ�����
��x��y����ķ�����
��ʽ(10)�����2���������ֱ�Ϊ��





 (11)
(11)

 (12)
(12)
2.4 ��Һѹ����������������Ƶ�
��ʽ(6)�����������շ��̿ɵã�

 (13)
(13)

 (14)
(14)
ʽ�У� ��
�� �ֱ�Ϊ�Ƕ���
�ֱ�Ϊ�Ƕ��� �ĽǼ��ٶȣ�
�ĽǼ��ٶȣ� Ϊ�Ƕ��Ľ��ٶȣ�
Ϊ�Ƕ��Ľ��ٶȣ� ��
�� ��
�� ��
�� ��
�� ��
�� ��ʽ(7)~(9)�ֱ�Թ���������ͦ���ƫ����á�
��ʽ(7)~(9)�ֱ�Թ���������ͦ���ƫ����á�
��ǰ��������ƽ�������Զ�Һѹ�ʹӶ�Һѹ����ǻ����ǻ�������и�ǻ���и�ǻ�������γ�2����ջ�·��������ǻ����ѹΪp1���и�ǻ����ѹΪp2�����������������ۼ���O����ʱ�뷽����תʱ���Զ�Һѹ����ǻ��������ˣ�p1=0�����Ƶ��ɵ��Զ�Һѹ�ʹӶ�Һѹ��������֮��������¹�ϵ��
 (15)
(15)
ʽ�У�D1��d1�ֱ�Ϊ�Զ�Һѹ�ĸ�Ͳ�ھ��ͻ�����ֱ����D2��d2�ֱ�Ϊ�Ӷ�Һѹ�ĸ�Ͳ�ھ��ͻ�����ֱ����
���ʽ(11)~(15)���ɷֱ���õ�ƽ������3��Һѹ���������ֱ�Ϊ��









 (16)
(16)




 (17)
(17)



 (18)
(18)
ʽ(16)~(18)�ֱ�Ϊ��ƽ�ṹ��3��Һѹ���������Ķ���ѧ�����⣬ֱ�۽�ʾ����Щ�������Һѹ��������������������ڶ���ѧ�����Լ�������һ���Ż���ơ����ڹ�������н��м�������ֻ����ʽ(16)~(18)�еĸ����ٶȺͽǼ��ٶ�Ϊ0�����ɻ��3��Һѹ���������ľ���ѧ�����⡣
3 ����ʵ���������
����MATLAB����ƽ̨����ɽ������װ���������Ƶ�SWTH3514�������۲�װ��Ϊ����ʵ�����з����������Ҫ����ֵ�趨���£�a1=755 mm��l2=278 mm��l3=321 mm��l4=310 mm��l5=205 mm��s=5 788 mm��m2=2 100 kg��m3=15 kg��m4=33 kg������ƽ̨����Ϊ700 kg�����ھ��������У��ۼ����Ƚ��ٶ���ʱ�뷽����ת�� rad/s���ۼ�ת�Ǧ��ı仯��ΧΪ
rad/s���ۼ�ת�Ǧ��ı仯��ΧΪ ��Ϊ�˱�֤���������й���ƽ̨��ˮƽ���ۼ�ҡ��ת�ǦµĽ��ٶȺͽǼ��ٶȵ��趨�ֱ���ͼ4��ͼ5��ʾ[16]���ۼ���ת�������У�����ƽ�����ĸ��طֱ��趨Ϊ���غ�1 500 kgʱ����������ʾ���Һѹ��������Ϊ��ֵ�����Ӷ�Һѹ������Һѹ��������Ϊ��ֵ����˵�����Һѹ��������ʵ�����÷���Ͷ���ѧ��ѧģ�ͽ���ʱ�ļٶ�������ͬ�����Ӷ�Һѹ������Һѹ����������ʵ�����÷�����ٶ������෴��Ϊ�˱��ڶԱȷ�����3��Һѹ����������ȡ����ֵ��������������ͼ6��ʾ��
��Ϊ�˱�֤���������й���ƽ̨��ˮƽ���ۼ�ҡ��ת�ǦµĽ��ٶȺͽǼ��ٶȵ��趨�ֱ���ͼ4��ͼ5��ʾ[16]���ۼ���ת�������У�����ƽ�����ĸ��طֱ��趨Ϊ���غ�1 500 kgʱ����������ʾ���Һѹ��������Ϊ��ֵ�����Ӷ�Һѹ������Һѹ��������Ϊ��ֵ����˵�����Һѹ��������ʵ�����÷���Ͷ���ѧ��ѧģ�ͽ���ʱ�ļٶ�������ͬ�����Ӷ�Һѹ������Һѹ����������ʵ�����÷�����ٶ������෴��Ϊ�˱��ڶԱȷ�����3��Һѹ����������ȡ����ֵ��������������ͼ6��ʾ��
ͼ6��������ƽ�����ĸ���Խ������ĸ�Һѹ��������Խ����3��Һѹ���������У��Զ�Һѹ�ʹӶ�Һѹ���������Ը��ر仯�����У��������ɿ���������1 500 kgʱ�����Һѹ��������ֻ������ԭ����1.7�����ң����Զ�Һѹ�ʹӶ�Һѹ����������������ԭ����3.2����
��ͼ6����֪����ͬ���ĸ��������£����űۼ�ת�Dz�������3��Һѹ�������������ϼ�С������3�����������б��Һѹ��������ʼ��������űۼ�ת�Dz����������ֲ������С���Զ�Һѹ�ʹӶ�Һѹ�������ߵ��������У��Զ�Һѹ����������С����ʽ(15)��֪������2��Һѹ�ĸ�Ͳ�ھ��ͻ�����ֱ�������ġ������ϣ��Զ�Һѹ���������ʹӶ�Һѹ������������Һѹ����������ȶ���1������������ˣ��ڹ�ҵ����У��ɸ���ʵ�ʰ�װ�ռ�ѡ����2��Һѹ���ͺš�
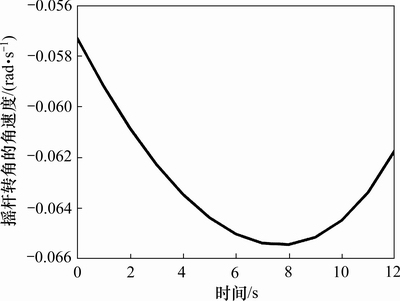
ͼ4 ҡ��ת�ǵĽ��ٶ�
Fig. 4 Angular speed of rocker angle
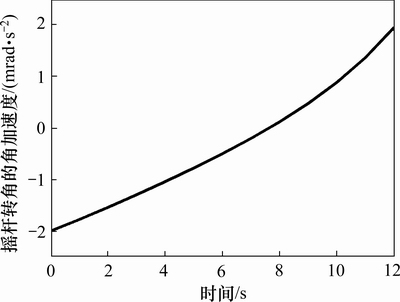
ͼ5 ҡ��ת�ǵĽǼ��ٶ�
Fig. 5 Angular acceleration of rocker angle
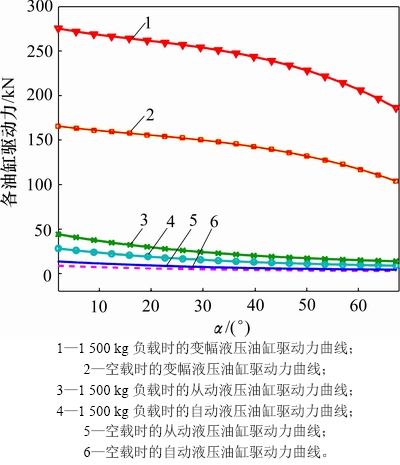
ͼ6 3��Һѹ������������
Fig. 6 Driving force curve of three hydraulic cylinders
���⣬���Ը�Һѹ���������ľ���ѧ������Ͷ���ѧ��������з���Աȷ��������������������ۼ�����ת����������ƽ̨ʱ���������������ضԸ�Һѹ����������Ӱ���С����Һѹ����������Ҫ���ڿ˷����������������ء�
4 ������֤
��ɽ������װ���������Ƶ�SWTH3514�������۲�װ��Ϊ�������ƽ�����ĸ���Ϊ1 500 kg��2��ѹ���������ֱ�װ�ڶ�·�������Һѹ���и�ǻ����ǻ�ij��ڴ�����ѹ������������һ���������ֳ�ʽҺѹ�����ǣ����ɷֱ��þ��������б��Һѹ���и�ǻ����ǻ��ѹ���仯�������֪���Һѹ��Ͳ�ھ��ͻ�����ֱ���������������õ��и�ǻ����ǻ��ѹ������ñ��Һѹ�����������ߡ�������������ñ��Һѹ��������������ͼ7��ʾ���Ա�ͼ7�еı��Һѹ������������������������֪�����߾�����ͬ�ı仯���ƣ����Ǻ϶Ƚϸߣ��ɴ˿��ж������õ���ѧģ�ͼ�����ģ������ȷ�ģ�˵���ö���ѧģ���ܹ�����ʵ�ط�ӳ��ƽ�����Ķ���ѧ���ԡ�

ͼ7 ���Һѹ�����������������������Ա�
Fig. 7 Comparison of simulation results with experimental ones of driving forces of hydraulic cylinder
5 ����
1) �ֱ��Ƶ��˵�ƽ�ṹ3��Һѹ���������Ķ���ѧ�����⣬ֱ�۽�ʾ�����Һѹ��������ֱ�ӹ����IJ����������ڹ�����Ƽ���ͷ�����Ҳ�����ڽ�һ�������Ż���ơ�
2) ͨ��3��Һѹ���������Ķ���ѧ��������Ի�ö�Ӧ�ľ���ѧ�����⣬�����ڹ�������еļ��������
3) �Զ�Һѹ�����������Ӷ�Һѹ���������ͱ��Һѹ�������������У�ǰ���߶Ը��ر仯�����С�
4) �Զ�Һѹ���������ʹӶ�Һѹ������������Դ�С�����ߵĸ�Ͳ�ھ��ͻ�����ֱ���������ڹ�������У�����Ҫ���ݰ�װ�ռ�ѡ���Զ�Һѹ�ʹӶ�Һѹ���ͺš�
�ο����ף�
[1] ������. ���ڸ߿���ҵƽ̨���г���չ����[J]. ������е��, 2017, 38(8): 11-13.
ZHANG Leiqing. Analysis on the domestic aerial work platform and market development[J]. Construction Mechanization, 2017, 38(8): 11-13.
[2] �ƺ��, ��־, ��Ȼ, ��. ���� ADAMS �������۲�װ�����ߵ�ƽ�������[J]. ������е, 2016(9): 62-65.
YAN Hongfeng, WANG Zhi, ZOU Zhuoran, et al. Leveling mechanism design for attachment of telescopic handler based on ADAMS[J]. Construction Machinery, 2016(9): 62-65.
[3] DERLUKIEWICZ D, PRZYBYLEK G. Chosen aspects of FEM strength analysis of telescopic jib mounted on mobile platform[J]. Automation in Construction, 2008, 17(3): 278-283.
[4] ���廪, �쿡��, ��ʯ��, ��. �����۲�װ����������Ľµ�λ���Ż�[J]. ���пƼ���ѧѧ��(��Ȼ��ѧ��), 2011, 39(11): 423-429.
HE Qinghua, ZHU Junlin, WANG Shilin, et al. The optimization of the hinge point position of leveling mechanism for the telescopic handler[J]. Journal of Huazhong University of Science and Technology(Nature Science), 2011, 39(11): 423-429.
[5] ��ʯ��. �����۲�װ������װ�ö���ѧ�����о����Ż����[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2011: 23-28.
WANG Shilin. Dynamical characteristic analysis and optimal design of the work device of the telescopic handler[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2011: 23-28.
[6] ������, ������, ����. �߿���ҵƽ̨��ƽ������ѧ����[J]. ������е��, 2010, 31(8): 44-46.
LI Lianyong, XIN Hongyan, BAI Ri. Mechanics analysis of leveling mechanism of aerial work platform[J]. Construction Mechanization, 2010, 31(8): 44-46.
[7] �ƺ��, ��ΰƽ, ��־, ��. ����ADAMS�������۲�װ������װ���˶�ѧ�붯��ѧ����[J]. ���������е, 2013(9): 57-62.
YAN Hongfeng, WANG Weiping, WANG Zhi, et al. ADAMS based Kinematics and dynamics simulation of telescopic handler working device[J]. Hoisting and Conveying Machinery, 2013(9): 57-62.
[8] ����. ������ʽ�߿���ҵƽ̨��ƽ�����������Ż�[D]. �Ͼ�: �Ͼ���ҵ��ѧ��е���ӹ���ѧԺ, 2010: 23-29.
ZHANG Peng. Simulation and optimization of telescopic boom aerial work platform leveling mechanism[D]. Nanjing: Nanjing Forestry University. Institute of Mechanical and Electric Engineering, 2010: 23-29.
[9] ��ΰ, ����. ����ADAMS�ķɻ��������ۼܵ�ƽ�����������[J]. ���̻�е, 2010, 41(2): 20-23.
ZHAO Wei, LI Hongbiao. ADAMS based simulation analysis of the leveling mechanism for boom frame of airplane ice removing vehicle[J]. Construction Machinery, 2010, 41(2): 20-23.
[10] GUPTA A, RATTAN S S, MUKHERJEE S. Dynamic analysis of compliant-based slider crank mechanism using the environments like ANSYS[J]. International Journal of Mechanisms and Robotic Systems, 2016, 3(4): 317-332.
[11] �̾�, ����. ����˫�ۿռ�����˶���ѧ��ģ����������������غ��˶�����Ӧ����[J]. ������ѧ, 2017, 34(2): 235-241.
CHENG Jing, CHEN Li. Dynamics for dual-arm floating space robot with closed chain and adaptive control for object motion with limited torque[J]. Engineering Mechanics, 2017, 34(2): 235-241.
[12] �ں�Ӣ, �Ƶ���, ������. ƽ����˻����˶�ѧ�Ͷ���ѧ���Է���[J]. ��������ҵ��ѧѧ��, 2007, 39(6): 940-943.
YU Hongying, TANG Dewei, WANG Jianyu. Analysis of the kinematic and dynamic characteristics of a planar five-bar mechanism[J]. Journal of Harbin Institute of Technology, 2007, 39(6): 940-943.
[13] ���˾�, ţ����. 2-PRC-FP(C)������������ƽ̨���䶯��ѧ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2017, 48(4): 925-935.
LIU Naijun, NIU Junchuan. 2-PRC-PR(C) parallel mechanism platform for vibration isolation and its dynamics[J]. Journal of Central South University(Science and Technology), 2017, 48(4): 925-935.
[14] ��С�٣��ι�ƽ. �´�������Ծ�����˶���ѧ��ģ�����[J]. ������ҵ��ѧѧ��, 2009, 21(3): 36-41.
XIONG Xiaoqin, HE Guangping. Dynamics Modelling and numerical simulation of one-leg hopping kangaroo robot[J]. Journal of North China University of Technology, 2009, 21(3): 36-41.
[15] ������, ����, ��˧, ��. һ����������Һѹ�ھ�װ�õ��˶�ѧ�Ͷ���ѧ����[J]. ��е����ѧ��, 2015, 51(1): 60-68.
DING Huafeng, LIU Zheng, LIU Shuai, et al. Kinematics and dynamics analysis of an innovative face-shovel hydraulic excavator in mining[J]. Journal of Mechanical Engineering, 2015, 51(1): 60-68.
[16] ����÷, ������, ��ҫ. �����۲�װ������װ���˶�ѧ����[J]. ��е���, 2015, 32(5): 39-42.
KANG Huimei, XU Yishe, JIN Yao. Kinematic analysis of working device in telehandler[J]. Journal of Machine Design, 2015, 32(5): 39-42.
(�༭ �²ӻ�)
�ո����ڣ�2018-08-10�������ڣ�2018-10-12
������Ŀ(Foundation item)������ʡ����������������л���������Ŀ(15B136)��������Ȼ��ѧ����������Ŀ(51775185) (Project(15B136) supported by the Scientific Research Fund of Education Department of Hunan Province; Project(51775185) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�����÷����ʿ�������ڣ����»�������ѧ�������Ż�����о���E-mail: plum_007@sina.com.cn
ժҪ��Ϊ���о������ʽҺѹ��ƽ�����ľ��������͵�ƽ�����ȶ���ѧ���ܣ��Ծ�����������ƽ���Ĺ���ƽ̨��ŷ�����ֱ���ʽ�ͱ�ֱ���ʽ���и�д�������������շ�������ƽ�����Ķ���ѧ��ѧģ�ͣ�����̰������ø���ʸ�������������������ٶȷ��̡��Ƶ���ƽ�����Ķ��ܷ��̡������鹦ԭ���Ƶ���ƽ�����Ĺ��������̡��Ƶ���Һѹ���������Ķ���ѧ�����⡣����MATLAB������������ѧģ�ͽ��й���ʵ�����棬������ͬ������3��Һѹ�������������Է���������������֤���о�����������Զ�Һѹ���������ʹӶ�Һѹ������������Һѹ����������ȶԸ��ر仯�����У��Զ�Һѹ���������ʹӶ�Һѹ������������Դ�С�����ߵĸ�Ͳ�ھ��ͻ�����ֱ���������������ĸ�Һѹ���������Ľ�����ȿ����ڹ�����Ƽ���ͷ�����Ҳ�����ڻ����Ż���ơ�
[1] ������. ���ڸ߿���ҵƽ̨���г���չ����[J]. ������е��, 2017, 38(8): 11-13.
[2] �ƺ��, ��־, ��Ȼ, ��. ���� ADAMS �������۲�װ�����ߵ�ƽ�������[J]. ������е, 2016(9): 62-65.
[5] ��ʯ��. �����۲�װ������װ�ö���ѧ�����о����Ż����[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2011: 23-28.
[6] ������, ������, ����. �߿���ҵƽ̨��ƽ������ѧ����[J]. ������е��, 2010, 31(8): 44-46.
[7] �ƺ��, ��ΰƽ, ��־, ��. ����ADAMS�������۲�װ������װ���˶�ѧ�붯��ѧ����[J]. ���������е, 2013(9): 57-62.
[8] ����. ������ʽ�߿���ҵƽ̨��ƽ�����������Ż�[D]. �Ͼ�: �Ͼ���ҵ��ѧ��е���ӹ���ѧԺ, 2010: 23-29.
[9] ��ΰ, ����. ����ADAMS�ķɻ��������ۼܵ�ƽ�����������[J]. ���̻�е, 2010, 41(2): 20-23.
[12] �ں�Ӣ, �Ƶ���, ������. ƽ����˻����˶�ѧ�Ͷ���ѧ���Է���[J]. ��������ҵ��ѧѧ��, 2007, 39(6): 940-943.
[14] ��С�٣��ι�ƽ. �´�������Ծ�����˶���ѧ��ģ�����[J]. ������ҵ��ѧѧ��, 2009, 21(3): 36-41.
[15] ������, ����, ��˧, ��. һ����������Һѹ�ھ�װ�õ��˶�ѧ�Ͷ���ѧ����[J]. ��е����ѧ��, 2015, 51(1): 60-68.
[16] ����÷, ������, ��ҫ. �����۲�װ������װ���˶�ѧ����[J]. ��е���, 2015, 32(5): 39-42.
