


DOI�� 10.11817/j.issn.1672-7207.2021.05.011
һ�״�ʱ��ϵͳ���ͺ�ʱ�������Կ��ſ���
���dz�1���߽�1, 2��������1��������1
(1. �㶫��ҵ��ѧ ���ܵ������켼����װ�������ص�ʵ���ң��㶫 ���ݣ�510006��
2. �㶫��ҵ��ѧ ���ܼ�������������������ص�ʵ���ң��㶫 ���ݣ�510006)
ժ Ҫ��
ʱ��ϵͳ�Ŀ������⣬���һ���ͺ�ʱ���������Կ��ſ��Ʒ��������ȣ�����ʱ��ϵͳ�������Կ��ſ��ƵĿ���������ϵͳ������ʱ�����ϵIJ�ƥ�����⣬���һ���µ��ͺ�ʱ�������ṹ��Ȼ����Կ��ſ���˼�룬�õ��ͺ�ʱ�������Կ��ſ��Ƶıջ��ṹ������һ�״�ʱ��ϵͳ������Ƶ�����˵���÷������ȶ��ԣ����ܽ����������������������������㷨���ý�����бȽϡ��о�����������ͺ�ʱ�������Կ��ſ��ƶԴ�ʱ���̵IJ����㶯�����У���Ƚ������е�PI-Smith���ơ�Ԥ���Կ��ſ��Ƶ��㷨���ͺ�ʱ�������Կ��ſ��ƿ�����Ч����һ�״�ʱ�Ͷ���Ŀ���Ч�������и��õĶ�̬���ܺͿ���³���ԡ�
�ؼ��ʣ�
�ͺ�ʱ���������Կ��ſ�������ʱ��ϵͳ��
��ͼ����ţ�TP273 ���ױ�־�룺A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±�ţ�1672-7207��2021��05-1493-09
Reduced time-delay active disturbance rejection control for first-order systems with large time-delay
LIU��Yachao1, GAO��Jian1, 2, ZHONG��Yongbin1, ZHANG��Lanyu1
(1. State Key Laboratory of Precision Electronic Manufacturing Technology & Equipment, Guangdong University of Technology, Guangzhou 510006, China;
2. Key Laboratory of Intelligent Inspection and Manufacturing Internet of Things of Ministry of Education, Guangdong University of Technology, Guangzhou 510006, China)
Abstract: In order to solve the control problem of first-order systems with large time-delay, the reduced time-delay active disturbance rejection control(RTADRC) method was proposed. Firstly, the mismatching problem between control input and system feedback in linear active disturbance rejection control(LADRC) was analyzed when the plant had time-delay, and a new reduced time-delay structure was designed. Secondly, combined with the idea of LADRC, the closed-loop structure of RTADRC was obtained. The stability of the method was illustrated by frequency domain analysis, and the parameter tuning rules were summarized. Finally, the simulation results were compared with those of the existing algorithms. The results show that the proposed RTADRC is not sensitive to the parameter perturbation. Compared with PI-Smith control and predictive active disturbance rejection control, RTADRC can effectively improve the control effect of the first-order systems with large time-delay, and has better dynamic performance and control robustness.
Key words: reduced time-delay; active disturbance rejection control; large time-delay
ʱ���ͺڹ㷺������ұ�𡢻����Լ���ֽ�ȹ�ҵ����������[1]�����ڵ��͵�һ��ʱ��ϵͳ��ͨ�����ͺ�ʱ����ʱ�䳣���ı�ֵ������ϵͳ��ʱ��Ӱ��ij̶ȣ�һ�㵱��ֵ���ڵ���0.5ʱ������ϵͳ���ڴ�ʱ��ϵͳ�������Ѷȴ����PID���������㹤ҵ����Ҫ��[2-3]����������HAN[4]������Կ��ſ���(active disturbance rejection control��ADRC)��������������ص��Ŷ����ƺͲ���Ч��������Ӧ�õ�ʱ��ϵͳ�Ŀ����У������������ʱ�ͷ����״���߷�������Ԥ�����Լ����Ԥ������4�ַ���[5]������Щ���������з����Ի��ڣ������������ѣ��Ҷ�������Сʱ�͵ij���[6-10]��GAO[11]�������Ի������ͼ�������ԭ��������������Կ��ſ���(linear ADRC��LADRC)�ṹ�������˿��Ʋ�����������������Կ��ſ��ƵĹ���ʵ��[12-18]��������ʱ��ϵͳ��������������״̬�۲���(linear extend state observer, LESO)�Ŀ��������ϵͳ������ʱ�����ϲ�ƥ�䣬�����������Կ��ſ��ƵĿ���������������ڴ�ʱ��ϵͳ���ԣ�����Ҫ���2·�źŵIJ�ƥ�����⡣ZHAO��[19]ͨ���Կ�����������ͺ������һ�ָĽ����Կ��ſ���(modified ADRC, MADRC)�����������ַ������Ը����Կ��ſ����ڴ�ʱ��ϵͳ�еĿ���Ч����ZHENG��[20-21]����SmithԤ�����������Ԥ���Կ��ſ���(predictive ADRC��PADRC)�������Խ������LESO��2·�źŲ�ƥ�����⣬�����ַ����Ƚ��������ض����ϵͳģ�Ͳ���������³���Խϲ��������[22]���Կ��ſ����������ͺ�ʱ������ԭ����ͨ��һ��̩��չ����ʱ�ͻ��ڽ��н��ƣ�����ʱ��ϵͳת��ΪСʱ��ϵͳ���п��ơ��÷������ڴ�ͳ�ķ������Կ��ſ��ƣ�ȱ���ջ��ȶ��Է����������������ӣ����⣬���ڴ��ʱ���ͺڲ���һ��̩��չ���������á������Щ���⣬����ͨ��һ��Pade���ƣ����һ���µ��ͺ�ʱ�������ṹ����������Կ��ſ���˼������ͺ�ʱ�������Կ��ſ���(reduced time-delay ADRC��RTADRC)����������Ƶ������ķ����Ƶ�RTADRC�ıջ��ȶ��ԣ����������Ʋ�������������ͨ������ʵ�飬�Ƚ�RTADRC�����������㷨�Ŀ������ܡ�
1 �Կ��ſ�������
1.1�������Կ��ſ��ƽṹ
����ʱ�ͻ��ڵ�һ���Ի���ϵͳ���ַ��̱�ʾΪ

��

ʽ�У�






��


ʽ�У�




����ʽ(3)���LESO:
ʽ�У�


��������������Ϊ

ʽ�У�

1.2���źŲ�ƥ������
����LESO�����


�������Կ��ſ����У�ͨ��LESO�����Ŷ���ȷ���ƺ�ʵʱ�������ܹ������ض������ɼĻ��ִ����ͣ���������˿���������ƣ����Ҿ���ͻ���ĸ�������������
ͨ��һ��ʱ��ϵͳ�Ĵ��ݺ���Ϊ

ʽ�У�





�����ͺ�ʱ��Ĵ��ڣ�ϵͳ��ʵ�����

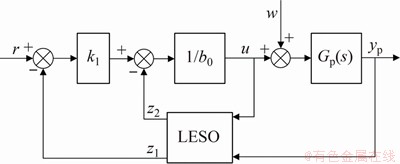
ͼ1�����������Կ��ſ��ƽṹ
Fig. 1��Structure of conventional LADRC
2 �ͺ�ʱ�������Կ��ſ���
2.1���ͺ�ʱ������ԭ��
�ͺ�ʱ��������ָ�����ʱ���ͺ�ת��Ϊ��С��ʱ���ӳ٣��Լ�С�����źŵIJ�ƥ��̶ȣ��Ӷ�����LESO�Ĺ۲⸺������߹۲⾫�ȡ���������Ƶ��ͺ�ʱ�������ṹ��ͼ2��ʾ��
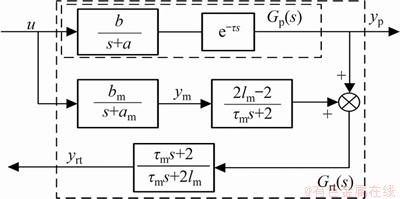
ͼ2���ͺ�ʱ�������ṹ
Fig. 2��Structure of reduced time-delay
�����ͺ�ʱ�������ṹת������±��ض���Ϊ

ʽ�У�am��bm��
����am=a��bm=b��


�Ƚ�ʽ(7)��ʽ(10)��֪������2��Pade���ƣ��ͺ�ʱ�������ṹ���±��ض�����ͺ�ʱ����СΪԭ���ض����ͺ�ʱ���




2.2���ͺ�ʱ�������Կ��ſ������
��ͼ2��ʽ(10)��֪������ʱ���ͺ��������ڵõ���ϵͳ�����źŲ���������ϵͳ����źţ����ǽ��ͺ�ʱ����СΪԭ���ض����ͺ�ʱ���






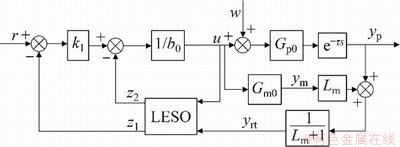
ͼ3���ͺ�ʱ�������Կ��ſ��ƽṹ
Fig. 3��Structure of RTADRC
���ǵ�ʵ�ʹ�ҵ������ģ�Ͳ�����ϵͳ������������ȫһ�£�����2��Pade���ƻ���������ģ�����ɽ���Щ���ͳһ�����Ŷ��ķ��룬ͨ��LESO������й��ƺͲ�������ʵ���ȶ����ơ�����ͨ��Ƶ�������˵��RTADRC���ȶ��ԡ�
2.3��Ƶ�����
�����ʼ�����£�����ʽ(4)��ͼ3�Ƶ���LESO�Ĵ��ݺ���Ϊ
��ʽ(11)����ʽ(5)���ɵÿ�������Ĵ��ݺ�������ʽ��



����ʽ(12)���õ�RTADRC�ĵ���·�ջ������ṹ��ͼ4��ʾ��
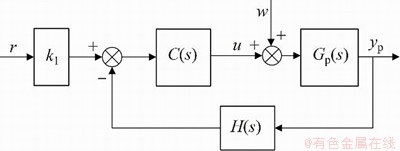
ͼ4��RTADRC�ĵ���·�����ṹ
Fig. 4��Single loop feedback structure of RTADRC
ͼ4�У�




ʽ�У�














���ǣ��������ݺ���Ϊ


���������ͺ�ʱ��������ʩ��lm=1ʱ����

ʽ(16)Ϊ���������Կ��ŵĿ������ݺ�������Ӧ��������ֱ�Ϊ

�������ͺ�ʱ��������ʩ����lm�㹻��ʱ����


�����Ʋ�����ͬʱ��ʽ(17)��Ӧ�Ŀ���������Ƚ��ڳ��������Կ�������ƽ���ƶ���˵��ϵͳ���ȶ��Ե�����ߡ�
2.4����������
һ�״�ʱ��ϵͳ���ͺ�ʱ�������Կ��ſ��ƹ���5������(k1��




ʽ�У�

������ʱ�͵�ϵͳ��



��ʵ�ʵĹ�ҵӦ���У��ɸ��������IJ�������������ѡ��һ��ϴ��
3 �����о�
3.1����ҵ�Ƕȴ�ʱ��ϵͳ
ѡȡ����[21]�е�һ��ҵ�Ƕȴ�ʱ��ϵͳ���䴫�ݺ���Ϊ

��ϵͳ��ģ�Ͳ���Ϊ��K=0.85��T=1 200��
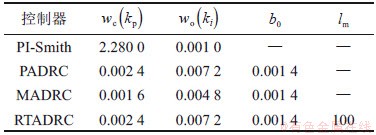
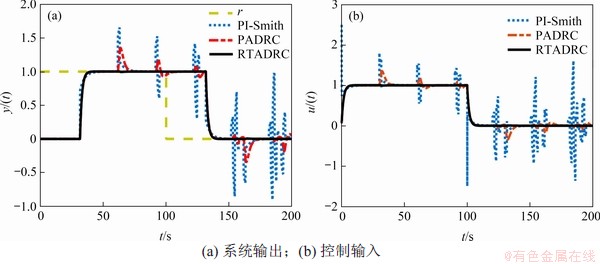
��1��ϵͳ(19)�Ŀ��Ʋ���
Table 1��Control parameters of system (19)
3.1.1������ģ�ͷ��桡
����ģ�;�ȷ�����е�λ��Ծ��Ӧ������t=15 000 s�������ֵΪ-0.5�Ľ�Ծ�Ŷ���ϵͳ��������Ϳ�����������ͼ5��ʾ��
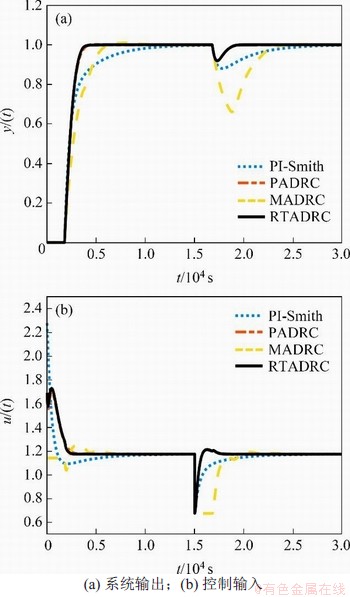
ͼ5������ģ��(19)�µ�ϵͳ��Ӧ
Fig. 5��System response with ideal model (19)
��ͼ5��֪��������ģ����RTADRC��PADRC�����������ƵĿ������ܣ����ܹ��Ϻõؽ����ʱ��ϵͳ���źŲ�ƥ�����⣬�����MADRC��PI-Smith���������и��õĸ���Ч�����Ŷ���������������ʵ�ʹ����У�ϵͳ������ģ�Ͳ�����������ȫ��ͬ���ͺ�ʱ�䡢ϵͳ�����Լ�ʱ�䳣���������һ�����㶯��Χ���ͺ�ʱ����ʱ�䳣���ı�ֵ������ϵͳʱ�͵����س̶ȣ����濼�ǵ��ͺ�ʱ���ʱ�䳣�������仯ʱ���ù�ҵ�Ƕȴ�ʱ��ϵͳ�ڼ��ֿ��Ʒ����µ�³���Բ��Խ����
3.1.2�������㶯���桡
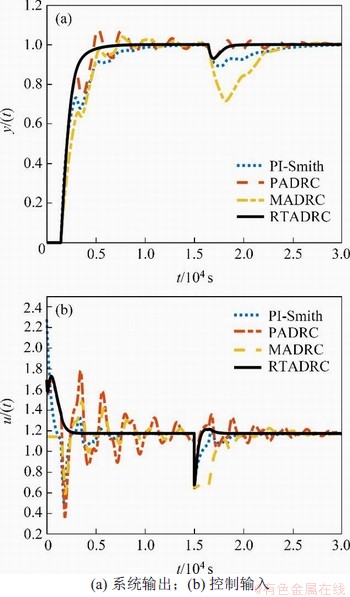
��������ģ���µĿ��Ʋ������䣬�����ͺ�ʱ������20%��ʱ�䳣����С20%����ϵͳʱ�͵����س̶���������ʱ���ջ���Ӧ��������Ϳ�������ͼ6��ʾ��ͬ���أ������ͺ�ʱ���С20%��ʱ�䳣������20%����ϵͳʱ�͵����س̶���������ʱ���ջ���Ӧ��������Ϳ�������ͼ7��ʾ��
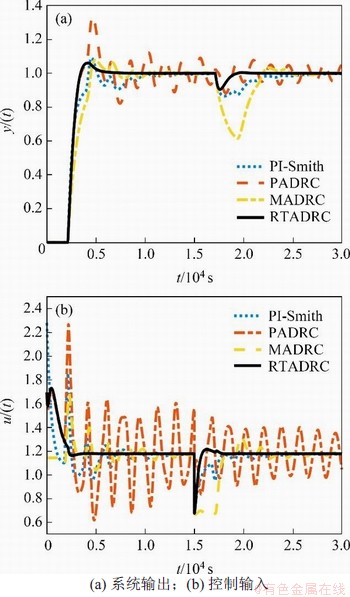
ͼ6��ϵͳ�ڲ����㶯�µıջ���Ӧ(�ͺ�ʱ������20%��ʱ�䳣����С20%)
Fig. 6��Closed-loop response of system with parameter perturbation (time-delay increased 20% and time constant reduced 20%)
ͼ7��ϵͳ�ڲ����㶯�µıջ���Ӧ(�ͺ�ʱ���С20%��ʱ�䳣������20%)
Fig. 7��Closed-loop response of system with parameter perturbation (time-delay reduced 20% and time constant increased 20%)
��ͼ6��֪����ϵͳ��ʱ�ͳ̶ȸ�������ʱ��RTADRC����������һ���ij��������Ǻܿ���ڵ�Ŀ��ֵ�����㹤ҵ����Ҫ�������MADRC������PADRC���������˸�������Լ�������ȵĿ����źŲ�����˵��PADRC������������ϵͳ��ģ�ͣ���ģ�Ͳ������㶯�������У�PI-Smith������Ȼ��Ȼ�ܹ�����Ŀ��ֵ��������ʱ����Ŷ��Ļָ�ʱ�䶼��RTADRC�����ij�����ͼ7��֪����ϵͳ��ʱ�ͳ̶���������ʱ��RTADRC�����ܹ����١�ƽ�ȵظ���Ŀ��ָ���PADRC��MADRC����������һ�����������źŲ����⻬����ˣ���ϵͳ��ģ�Ͳ��������㶯ʱ�������PI-Smith��MADRC��PADRC������RTADRC������Ȼ�ܹ��������õĸ������ܺ��Ŷ�����������
3.2������ʱ��ϵͳ
Ϊ��֤���᷽�����ڳ���ʱ��ϵͳ�Ŀ���Ч����ѡȡ����[22]�е�ģ��Ϊ�о������ݺ���Ϊ

��ģ�Ͳ���Ϊ��




��2��ϵͳ(20)�Ŀ��Ʋ���
Table 2��Control parameters of system (20)
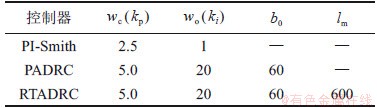
3.2.1������ģ�ͷ�������
��������ģ�͵ķ�������ͼ8��ʾ������3�ֿ������IJ������ո��Եĵ��ι��������������������Ŀ��ָ��ʱ��3�ֿ��Ʒ��������н�ǿ�ĸ����������ܹ�������������Ŀ��ֵ����RTADRC��MADRC�����Ŀ��������źŽ�PI-Smith�����Ŀ��������źŸ��ӹ⻬�Ҳ�����ͻ�䡣
ͼ8������ģ��(20)�µ�ϵͳ��Ӧ
Fig. 8��System response with ideal model (20)
3.2.2�������㶯���桡
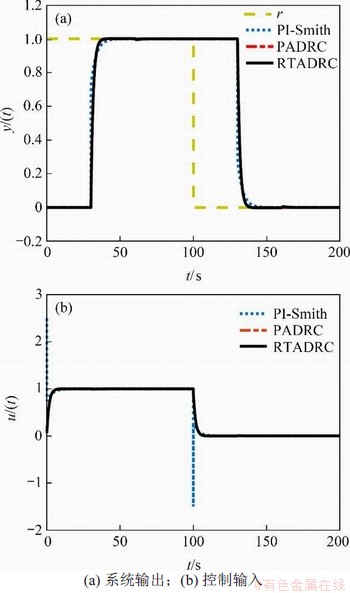
��������ʱ�ͳ̶�ʮ�����ص�ϵͳ����С�IJ����仯�Ϳ��ܻᵼ�������ջ�ϵͳ���ȶ����������ͺ�ʱ�䷢���㶯�����ͺ�ʱ������5%�����ֱ�2�еĿ������������䣬��������ͼ9��ʾ����ͼ9�ɼ���������PI-Smith��������PADRC���������ھ���������ģ�Ͳ�����SmithԤ���ṹ�����ͺ�ʱ��������㶯���Ƚ����У����ͺ�ʱ��ֻ����5%������¿������ܱ��úܲ����롣��RTADRC�������ڼ�С���ͺ�ʱ�䣬ͬʱ�������ͺ�ʱ����㶯��Χ����ˣ����ͺ�ʱ�䷢���仯ʱ��Ȼ�������õĿ����������ܹ����㳬��ʱ��ϵͳ�Ĺ�ҵ����Ҫ��
ͼ9��ϵͳ�ڲ����㶯�µıջ���Ӧ(�ͺ�ʱ������5%)
Fig. 9��Closed-loop response of system with parameter perturbation (time-delay increased 5%)
3.2.3���������ӱ仯��
��������lm�������ͺ�ʱ��������̶ȣ�������ȡ
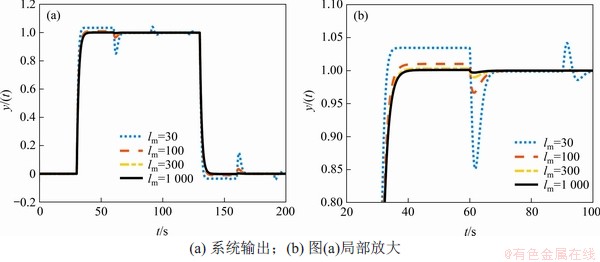
ͼ10��ϵͳ���������ӱ仯�µıջ���Ӧ
Fig. 10��Closed-loop response of system with weakening factor change
��Ȼ�ڶԱ��ض�����ͺ�ʱ���������������в�ȡ��2��Pade���ƣ�������һ����ģ�Ͳ�ȷ���ԣ����ǽ���Կ��ſ��ƵĶ������ƣ����������Ŷ��ľ�ȷ���ƺ�ʵʱ������ʹ�û����ͺ�ʱ���������Կ��ſ��Ʊ��������Ʒ������и�ǿ�Ŀ���������ʮ�������ڴ�ʱ��ϵͳ���ȶ����ơ�
4 ����
1) ����������ͺ�ʱ�������ṹ�ܹ�����ʱ�Ͷ���ת��Ϊ�����Сʱ�Ͷ�����п��ƣ���Ч���������뵽LESO��2·�źŵIJ�ƥ��̶ȣ�������LESO�Ĺ۲⸺��������˹۲⾫�ȡ�
2) ����ͬ���Ʋ����£�RTADRC�������бȳ����Կ��ſ��Ʒ�����ǿ���ȶ��ԣ��������˿��Ʋ�������������
3) ��Ƚ������еĿ����㷨��RTADRC����������ϵͳģ�ͣ���ϵͳ���������㶯ʱ����Ȼ�������õĶ�̬��Ӧ��
�ο����ף�
[1] AJMERI M, ALI A. Simple tuning rules for integrating processes with large time delay[J]. Asian Journal of Control, 2015, 17(5): 2033-2040.
[2] ZHANG Xu, LIN Yan. Adaptive output feedback control for a class of large-scale nonlinear time-delay systems[J]. Automatica, 2015, 52: 87-94.
[3] ������, ������. һ��ʱ��ϵͳ���ǻ�PI����[J]. ����������Ӧ��, 2019, 36(8): 1322-1328.
ZENG Zhezhao, LIU Wenjue. Wisdom PI control for first-order systems with time-delay[J]. Control Theory & Applications, 2019, 36(8): 1322-1328.
[4] HAN Jingqing. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3):900-906.
[5] ������, ���ĸ�. ��ʱ��ϵͳ���Կ��ſ���[J]. ���������, 1999, 14(4): 354-358.
HAN Jingqing, ZHANG Wenge. ADRC control for large time-delay systems[J]. Control and Decision, 1999, 14(4): 354-358.
[6] ZHANG Dongyang, YAO Xiaolan, WU Qinghe, et al. ADRC based control for a class of input time delay systems[J]. Journal of Systems Engineering and Electronics, 2017, 28(6): 1210-1220.
[7] ������, ����, ͯ����, ��. ʱ��ϵͳ���Կ��ſ�������[J]. ����������Ӧ��, 2013, 30(12): 1521-1533.
WANG Lijun, LI Qing, TONG Chaonan, et al. Overview of active disturbance rejection control for systems with time-delay[J]. Control Theory & Applications, 2013, 30(12): 1521-1533.
[8] HUANG Yi, XUE Wenchao. Active disturbance rejection control: Methodology and theoretical analysis[J]. ISA Transactions, 2014, 53(4): 963-976.
[9] RAN Maopeng, WANG Qing, DONG Chaoyang, et al. Active disturbance rejection control for uncertain time-delay nonlinear systems[J]. Automatica, 2020, 112: 108692.
[10] CASTANEDA L A, LUVIANO-JUAREZ A, OCHOA-ORTEGA G, et al. Tracking control of uncertain time delay systems: an ADRC approach[J]. Control Engineering Practice, 2018, 78: 97-104.
[11] GAO Zhiqiang. Scaling and bandwidth-parameterization based controller tuning[C]// Proceedings of the 2003 American Control Conference. Denver, CO, USA: IEEE, 2003: 4989-4996.
[12] �����, ������, �����. һ��ʱ��ϵͳ�����Կ��ſ����������ȶ������[J]. ����������Ӧ��, 2017, 34(9): 1244-1249.
LI Dazi, YU Wenlong, JIN Qibing. Stability region analysis of linear active disturbance rejection controllers for first order systems with time delay[J]. Control Theory & Applications, 2017, 34(9): 1244-1249.
[13] ����ǿ, ���, ������, ��. ʱ��ϵͳ���Կ��Ź���Ԥ����Ƶ����ܷ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2018, 49(8): 1960-1970.
CHEN Zengqiang, WU Xia, SUN Mingwei, et al. Performance analysis of active disturbance rejection generalized predictive control on time-delay systems[J]. Journal of Central South University(Science and Technology), 2018, 49(8): 1960-1970.
[14] ����˧, ����ǿ, ������, ��. һ���Դ�ʱ��ϵͳSmithԤ���Կ��ſ���[J]. ����ϵͳѧ��, 2018, 13(4): 500-508.
WANG Yongshuai, CHEN Zengqiang, SUN Mingwei, et al. Smith prediction and active disturbance rejection control for first-order inertial systems with long time-delay[J]. CAAI Transactions on Intelligent Systems, 2018, 13(4): 500-508.
[15] FU Caifen, TAN Wen. Tuning of linear ADRC with known plant information[J]. ISA Transactions, 2016, 65: 384-393.
[16] FU Caifen, TAN Wen. Control of unstable processes with time delays via ADRC[J]. ISA Transactions, 2017, 71: 530-541.
[17] CARRENO-ZAGARRA J J, GUZMAN J L, MORENO J C, et al. Linear active disturbance rejection control for a raceway photobioreactor[J]. Control Engineering Practice, 2019, 85: 271-279.
[18] ZHANG Binwen, TAN Wen, LI Jian. Tuning of linear active disturbance rejection controller with robustness specification[J]. ISA Transactions, 2019, 85: 237-246.
[19] ZHAO Shen, GAO Zhiqiang. Modified active disturbance rejection control for time-delay systems[J]. ISA Transactions, 2014, 53(4): 882-888.
[20] ZHENG Qinling, GAO Zhiqiang. Predictive active disturbance rejection control for processes with time delay[J]. ISA Transactions, 2014, 53(4): 873-881.
[21] �Ƶ´�, ��־ǿ, ������. �Ƕȴ�ʱ���̵�Ԥ���Կ��ſ��������[J]. ����������Ӧ��, 2017, 34(1): 101-108.
TANG Decui, GAO Zhiqiang, ZHANG Xuhong. Design of predictive active disturbance rejection controller for turbidity[J]. Control Theory & Applications, 2017, 34(1): 101-108.
[22] ������, �����, ʷ��ΰ. ��Դ��ͺ�ϵͳ���ͺ�ʱ�������Կ��ſ��Ʒ���[J]. ���ִ�ѧѧ��(��ѧ��), 2017, 47(4): 1231-1237.
WANG Chunyang, XIN Ruihao, SHI Hongwei. Decreasing time delay auto-disturbance rejection control method for large time delay systems[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(4): 1231-1237.
(�༭ �Կ�)
�ո����ڣ� 2020 -07 -13; �����ڣ� 2020 -10 -26
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51675106, U1601202)���㶫ʡ�ش��з�ר��(2018B090906002) (Projects(51675106, U1601202) supported by the National Natural Science Foundation of China; Project(2018B090906002) supported by the Major Research and Development Projects in Guangdong Province)
ͨ�����ߣ��߽�����ʿ�����ڣ������˶����ơ����ӷ�װ���о���E-mail��gaojian@gdut.edu.cn
���ø�ʽ�� ���dz�, �߽�, ������, ��. һ�״�ʱ��ϵͳ���ͺ�ʱ�������Կ��ſ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2021, 52(5): 1493-1501.
Citation: LIU Yachao, GAO Jian, ZHONG Yongbin, et al. Reduced time-delay active disturbance rejection control for first-order systems with large time-delay[J]. Journal of Central South University(Science and Technology), 2021, 52(5): 1493-1501.
ժҪ��Ϊ�˽��һ�״�ʱ��ϵͳ�Ŀ������⣬���һ���ͺ�ʱ���������Կ��ſ��Ʒ��������ȣ�����ʱ��ϵͳ�������Կ��ſ��ƵĿ���������ϵͳ������ʱ�����ϵIJ�ƥ�����⣬���һ���µ��ͺ�ʱ�������ṹ��Ȼ����Կ��ſ���˼�룬�õ��ͺ�ʱ�������Կ��ſ��Ƶıջ��ṹ������һ�״�ʱ��ϵͳ������Ƶ�����˵���÷������ȶ��ԣ����ܽ����������������������������㷨���ý�����бȽϡ��о�����������ͺ�ʱ�������Կ��ſ��ƶԴ�ʱ���̵IJ����㶯�����У���Ƚ������е�PI-Smith���ơ�Ԥ���Կ��ſ��Ƶ��㷨���ͺ�ʱ�������Կ��ſ��ƿ�����Ч����һ�״�ʱ�Ͷ���Ŀ���Ч�������и��õĶ�̬���ܺͿ���³���ԡ�
[3] ������, ������. һ��ʱ��ϵͳ���ǻ�PI����[J]. ����������Ӧ��, 2019, 36(8): 1322-1328.
[5] ������, ���ĸ�. ��ʱ��ϵͳ���Կ��ſ���[J]. ���������, 1999, 14(4): 354-358.
[7] ������, ����, ͯ����, ��. ʱ��ϵͳ���Կ��ſ�������[J]. ����������Ӧ��, 2013, 30(12): 1521-1533.
[14] ����˧, ����ǿ, ������, ��. һ���Դ�ʱ��ϵͳSmithԤ���Կ��ſ���[J]. ����ϵͳѧ��, 2018, 13(4): 500-508.
[21] �Ƶ´�, ��־ǿ, ������. �Ƕȴ�ʱ���̵�Ԥ���Կ��ſ��������[J]. ����������Ӧ��, 2017, 34(1): 101-108.
