����ͼ��������λ����ȡ���·���
�������������
(���ִ�ѧ ͨ�Ź���ѧԺ������ ������130022)
ժҪ�����һ�ֻ��ڻ�ģ�������ģ�������������������ȡ���·�������������ͼ����Ҫ��ȡ�����������������������������(��������)�����þ�������Ե�����ģ�壬�����������������������ȡҪ���㷨�����Ƶ������ۣ�������ʵ���о���ʵ�����������ø÷�����ȡ�����������������ܹ�������Ч�ض����Ƶ�����������ж�λ��Ϊ�����Զ�ʶ���㷨��ʵ�ִ����˻�����
�ؼ��ʣ�����ʶ��������ֵ�㣻��ģ�壻����ģ�壻ƥ��
��ͼ����ţ�TP391.41 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0693-05
New method to detect contour points of palmprint
LIU Fu, LI Dong, LI Xiao-yue
(College of Communications Engineering, Jilin University, Changchun 130022, China)
Abstract: A new method to detect the palm contour feature points was proposed based on the way of base template and feature template. In order to detect the contour feature points of palm, a kind of template targeted was used according to physiology characteristic of palm��s contour property points (convex and cave). The template could get the palm contour feature points effectively. The algorithm was deduced and discussed, and it was also verified by the experiment. The results of experiment show that the palm��s contour property points detected by this method can orientate palm, which is the base of palmprint automatic recognition.
Key words: palmprint recognition; contour extreme points; base template; feature template; match
������������ʶ����(Biometrics)��ָͨ����������������屾�����е������������������϶��ļ��������Ϊ����ʶ�������봫ͳ��������֤�ֶ���ȣ�����ʶ�����߱����ص����ƣ���Щ������Ҫ���������١��������ݼ�ð��������ʵ���ݵ�ȷ�ϣ��������ɱ���ȡ�������˹���֤���̣�����ʹ���ߣ����ٻ�������ʹ�ÿ���Կ����������鷳����Ϊһ��������������ʶ����������ʶ����[1-2]�����������������ʶ������������ص����ƣ�������������Ψһ�Ժ��������������������ڱ��û����ܣ����ƺ��зḻ���ȶ���ʶ����Ϣ����Щ�����ȶ������ԣ���ȡ����ʱ�����ܵ������ĸ��ţ�ʶ����̶�ͼ��ֱ���Ҫ�ߣ������Ʋ����������˻���ĥ���Ӱ�쵽���ɼ���ͼ����������Ϣ����ȡ�Ŀ����Ա�ָ��С�ö࣬��ˣ�����ʶ��������ʶ��������һ����Ҫ����������ʶ��ϵͳ[3-4]ͨ����Ҫ��������3���账��������ͼ��λ��������Ϣ��ȡ��������Ϣ��ʶ[5-6]�����У�����ͼ��Ķ�λ��������Ϣ��ȡ�Լ�������Ϣ��ʶ��ǰ�ᣬ����ͼ��λ�Ŀ����Ժ�ȷ��ֱ��Ӱ������ʶ��ϵͳ���ٶ��Լ����ȣ�������������λ�����ȡ�������ƶ�λ�Ĺؼ����ڡ�
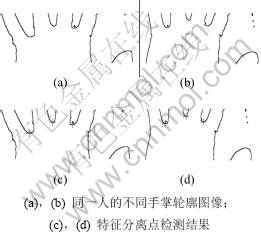
���Ƶ����IJ�λ������������ḻ�����ȶ������ݴ˽�������ϵ��������������ȡ֮ǰ����������ͼ��ָ��һ���̶��ߴ��������ͼ�����д����Ե�Ԥ����������Ҫ�����¼��֣�(1) �����Ƶ�[7]����˻������Ƽ��������ͽṹ������������֤�����ͻ�������ϸ������(��)������ʶ�����ڸ÷����г���������õ�1��2�����ƺ����Ʊ�Ե�����������Ϊx�ᣬ����Ϊy���ֱ������ϵ����λ����ͼ����ͼ1(a)��ʾ��(2) �ڴ˻����ϣ�Poon��[8]�����һ�ֻ�����������������·������÷�����ͼ1(b)��ʾ���������Ƚ����Ƶ���������Ϊ�����Բ�ΰ뻷��Ȼ��ÿ����Բ�ΰ뻷�ٷ�Ϊ���С�飬�ٶ�ÿ��С��ֱ���ȡ���������������ںܴ�̶��ϼ�����ͼ����ת��������Ӱ�죻(3) Zhang��[9]�������ɼ��豸�����Ԥ���������ںܴ�̶��Ͽ˷������Ƶ�ƽ�Ƽ���ת������Ӱ�죬�÷����Ѿ���Ϊһ�ֹ㷺ʹ�õ�Ԥ������������ͼ1(c)��ʾ��Hennings ���ڴ˻������ּ�������̬ѧ���������Ը���Ԥ����������³���ԣ�(4) Connie��[10]ʹ�ü��ǵ�ķ������õ���3����Ӧ�Ľǵ�v1��v2��v3���Դ�ȷ������ͼ�������������ͼ1(d)��ʾ��(5) Liambas ���������������������ⷽ���Ϸ��õ�����ͼ���Ԥ�����������÷���ͨ�������������з��û����ص����������Բ����λ���Ƶ�������������ͬʱ������Ƶķ��÷����������Լ���ָ����ָ��������и��õ�³���ԡ�һ�����͵�Ӧ�ø÷�������������ͼ��Ĵ��������ͼ1(e)��ʾ��
�����㷨��Ŀǰ�Ƚϳ��������������������ȡ�㷨���������߲���һ��ȫ�µ�����������ȡ�㷨���ɹ�ʵ���˸��ӱ����������������������ȡ��
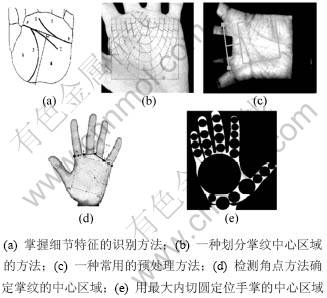
ͼ1 ���ֲ�ͬ��Ԥ��������
Fig.1 Several different pretreatment methods
1 ��ģ������������ֵ����
���Ƶ�����ͼ��������������Ƶ�ȫ����Ե��Ϣ���Ⱥ������ƵIJ�����������Ҳ��������ָ���ֵ������������Ƶ���Ч��Ϣ����ֻ��������������߲��֣�������������ͼ���е���ָ���֣���ˣ���ȡ����ָ��������������㣬������ͼ������Ʋ��ֺ�����ͼ�����ָ���ַ��뿪���ͳ�Ϊ������������ȡǰ����Ҫ��������⡣
��ָ�����ķ������������ص��������ֵ�����������ƣ�����ָ�����ķ��������������ͼ����Ϊ������������Լ�Сֵ�㣬�ʿɻ���������ָ���������ļ�Сֵ��������ȡ��������㡣
����������ͼ�����Ԥ����������ĵ�������Ҫ�ҵ�ʳָ����ָ����ָ������ָ�Լ�����ָ��Сָ֮��ķ���㡣Ĵָ��ʳָ֮���������������Ϣ����ˣ�Ĵָ��ʳָ֮��ķָ��ݲ����Կ��ǡ�Ϊ�ﵽ��Ч��������3������������Ŀ�ģ��������߲���һ�ֻ���ģ��ƥ��ķ�����������ƥ��ķ�ʽ�������Ƶ�����ͼ�Ӷ��õ���������������㡣
����һ����������ͼ��L(i��j)��˵����ˮƽ�������Һ�����ֵ�������ӣ���ֱ��������������ֵ�������ӣ���ͼ���һ��3��3��������ľ���������ͼ2��ʾ��

ͼ2 ͼ����������
Fig.2 Image pixel region
����һ����Сͬ��Ϊ3��3��ģ��T(i��j)��������������ͼ��������һ��Ϊ��ģ����������ص㣬����T(i��j)=L(i��j)�����У� ��
�� ����ȷ����ģ������������ͼ��Ķ�Ӧ��ϵ֮����һ����Ҫȷ�������Ǹ�ģ������������ͼ����Ӧ��ƥ���ϵ�������ƥ���ϵ������Ϊ��
����ȷ����ģ������������ͼ��Ķ�Ӧ��ϵ֮����һ����Ҫȷ�������Ǹ�ģ������������ͼ����Ӧ��ƥ���ϵ�������ƥ���ϵ������Ϊ��
(1) ��L(i��j)��0���������������ص㣬��ֻƥ���ɫ���ص㣬��ɫ���ص㲻�������Ƶ����������������ص�ģ��ƥ�㡣
(2) �����ص�L(i��j)=0���������ص�����ģ�壬��ʱ��������ϵT(i��j)=L(i��j)�������� ��������ص�Ϊ��Ч�㣬���õ�Ϊ����Լ�Сֵ�㣻��֮����¼�õ� �����벽��3��
��������ص�Ϊ��Ч�㣬���õ�Ϊ����Լ�Сֵ�㣻��֮����¼�õ� �����벽��3��
(3) �����ص���������(2)ʱ���Ը����ص���н�һ��ƥ�䣬����ʱ���ص�֮��Ĺ�ϵ���㣺 ��
�� ����õ�Ϊ�������ص㣬�����õ㡣
����õ�Ϊ�������ص㣬�����õ㡣
(4) ���ijһ�����ص����� ��
�� ����������ص㣬��������ֵ�㲻�������������в����������ص㡣
����������ص㣬��������ֵ�㲻�������������в����������ص㡣
(5) ���մ����ҡ����ϵ��µ�˳���������ͼ���ظ�����3�����裬���μ�¼���ܵ�������ֵ�㡣
ʹ�û�ģ��ƥ��ķ�������������ͼ����б���������Ч����ȡ������ͼ��Ŀ��ܼ�ֵ�㣬��ͼ3��ʾ��

ͼ3 ��ģ��ƥ�����������ͼ��Ŀ��ܼ�ֵ�㶨λ
Fig.3 Location of possible extreme points of palm contour pictures using base template match method
2 ����ģ�����������������
ʹ�û�ģ�������������ͼ��֮���Ѿ�����ͼ����ȫ������Լ�Сֵ����ȡ������������Щ��Լ�Сֵ�㲢������Ŀ�����㡣�����������ı����ָ�Σ���ͼ��ı���������ǿʱ������ͼ����������ȡ����������������ʱ�����һЩ���Σ�������һЩ��Ŀ�꼫ֵ�㣻���⣬���ƵĻҶ�ͼ���ڱ����ָ��Ҳ�����һЩ�����ļ�ֵ�㡣��ˣ�Ϊ����Ч��ȡ��ָ����֮��ķ���㣬��Ҫ��һ������Щ��Լ�Сֵ�����ʶ��
��������ͼ����ܼ�ֵ�����Լ�Сֵ���Կ�������Ϊ�������ص�����ֱ�����ϲ���������ֵΪ0���ڽӵ㣬����õ����ڵ���ֱ�����ϵ����ص㲻Ϊ��ɫ���ص㣻���õ�ˮƽ�����ϴ����ٽ���Ҷ�ֵΪ0�ĺ�ɫ���أ�����ˮƽ�������ٽ���ɫ���ص��������ֵ����С�ڸõ�ģ���ˮƽ���ڵĺ�ɫ���ص���õ�ƽ�л��ڸõ�֮�ϡ�
��������ģ��ķ���������Ч�����ÿ��ܼ�ֵ��ļ�Сֵ���ԣ����������������ȡ���⡣���ȣ���������ģ����ͼ������֮��Ĺ�ϵ��һ����СΪm��n��ͼ��A�ɱ�ʾΪ���µľ�����ʽ��
 (1)
(1)
���У�ai,j��������ֵ��i��j�ֱ�����ᡢ�����ꡣ
�������һ����СΪR��S������ģ��T�����У�S=2s+1�� ��������ģ�������Ϊ������
��������ģ�������Ϊ������ ��ģ�������ȡ������������ģ��T�ɱ�ʾΪ���µľ�����ʽ��
��ģ�������ȡ������������ģ��T�ɱ�ʾΪ���µľ�����ʽ��
 (2)
(2)
���У�ti,j��������ֵ��
��������ͼ���ƥ�������ʵ����ģ��Tƥ������ͼ��A�Ĺ��̡����ڴ�ƥ������ص㶼�߱���Լ�Сֵ���ԣ��ʲ������ص����Ӧ�ķ�����������ͼ���п��ܼ�ֵ��ai,j��Ӧģ����tR,s+1�㣬��R=i��s+1=j����ʱ��ģ��T������Ϊ��
 (3)
(3)
ģ��T��ͼ��A֮�����ѧ��ϵ������Ϊ����ģ��T�Ļ����Ӧͼ��A�е����ص�am,n��m��nΪA������һ�㣬���ж�Ӧ��ϵt(i,j)=a(m-R+i,n-s+j-1)�����У�t(i��j)Ϊģ��T�е�����һ�㣬��������1��i��2s+1��1��j��R��
Ӧ��������Ӧ��ϵ����ȫ�����ܼ�ֵ����Ϊ�����Ӧ��ģ��T�У�Ȼ���趨�����������ģ��T������Ӧ��������ʶ���ҳ����յ���������㡣����ģ���ƥ���ϵ�������£�
������ƥ��ģ��T(i��j)�ijߴ�ΪM��N�����أ�i��jΪ����ģ��������һ�㣬����1��i��M��1��j��N�����У�����ƥ��ģ�������ĿΪN����������N=2s+1��������ƥ��ģ�������ĿΪM����Ҫ��������������
(1) �����������ͼ����ģ���Ե��λ�á�����λ�ñ���Pl��Pr������ ����pl=M��ͬ������
����pl=M��ͬ������ ����pr=M����ʱ����������ͼ���ģ��T���Ϸ���������
����pr=M����ʱ����������ͼ���ģ��T���Ϸ��������� ����1��i��M�ķ�Χ�ڼ��T(i��1)��ֵ����T(i��1)=0����pl=i��ͬ������
����1��i��M�ķ�Χ�ڼ��T(i��1)��ֵ����T(i��1)=0����pl=i��ͬ������ ����1��i��M�ķ�Χ�ڼ��T(i��2s+1)��ֵ����T(i��2s+1)=0����pr=i�������ʱ����ֵ��������
����1��i��M�ķ�Χ�ڼ��T(i��2s+1)��ֵ����T(i��2s+1)=0����pr=i�������ʱ����ֵ�������� ������
������ ���������ΪС��Χ�ķ�����ÿ��ܼ�ֵ��Ϊ����������㡣
���������ΪС��Χ�ķ�����ÿ��ܼ�ֵ��Ϊ����������㡣
(2) ��Сֵ���Լ�⡣��ģ��Ļ��㿪ʼ�����������ɴ�С��˳�����м��ģ���ڵ�����ֵ��ͬʱ��¼T(i��j)=0ʱ����i��j��ģ���ϵ�λ�ã������䱣�档�� ������ж��ò������ص���벿�ִ��ڶϵ㣻ͬ������
������ж��ò������ص���벿�ִ��ڶϵ㣻ͬ������ ���ò������ص��Ұ벿�ִ��ڶϵ㡣������������¶����ж��ÿ��ܼ�ֵ��Ϊ����������㣬���ܼ�ֵ�������������Ҫͬʱ���㼫Сֵ�ļ�����������Խ�������ʽ�ϲ�Ϊ����2������ģ�����ص�����
���ò������ص��Ұ벿�ִ��ڶϵ㡣������������¶����ж��ÿ��ܼ�ֵ��Ϊ����������㣬���ܼ�ֵ�������������Ҫͬʱ���㼫Сֵ�ļ�����������Խ�������ʽ�ϲ�Ϊ����2������ģ�����ص����� ����õ����㼫Сֵ�������������õ�ͨ������ֵ���Լ��顣
����õ����㼫Сֵ�������������õ�ͨ������ֵ���Լ��顣
(3) ���ص���ͨ�Է�����ͨ������2�Ŀ��ܼ�ֵ����ô˲���������������ֵ���ͨ�ԣ���������2ʱ��¼�����ص㰴���������ɴ�С��˳��������T(i��j)Ϊ��������2ʱ����¼���������ص㣬����������� ������ж���������������ͨ�ģ������ж��õ�Ϊ����������㡣
������ж���������������ͨ�ģ������ж��õ�Ϊ����������㡣
(4) ��ͬʱ��������3�������ȫ����������з�������T(i1��j1)��T(i2��j2)Ϊ�����������ܼ�ֵ�㣬�����������ڣ�����������i1=i2��|j1-j2|��2�������������ͼ������������T(i��j)��λ������������i=i1=i2�� ��
��
�ڶ���������ͼ��������������ƥ������У���ģ��T�Ĵ�С����Ϊ11��5���ۺ�����4����Ҫ��ƥ�䲽�裬����������ͼ������������ģ��ķ�����⣬��Ӧ�ļ������ͼ4��ʾ��
ͼ4 ���������������ȡʵ����
Fig.4 Result of Harris corner detection
3 ���������
ʵ��ͼƬ����Ȼ���������½��У��Բɼ�����ԭʼͼ����б����ָ����ʵ�����������뱳���ķ��룻Ȼ���ûҶ���̬ѧ�ݶ���ȡ��������������ϸ��������֮��õ�����������ͼ����ͼ4(a)��(b)��ʾ��ͼ��ߴ�Ϊ640��480���ء�����������ͼ�����ģ�弫ֵ��������ý����ͼ4(c)��(d)��ʾ����ͼ4���Կ�������ȻһЩ����������������������������ı�����һ���̶ȵĸ��ţ�������������ͼ����ָ֮��ķ������Ȼ�ܹ����Ծ�ȷ����ȡ���÷����ʺ�����������ͼ�����һ�����������������ͼ�����ָ��ֵ�����ļ�⡣
4 ����
������ͼ���е�����������Ķ�λ��ȡ�������µ�̽�����ر��Ƕ�ijЩ�߱�����������������ͼ��ͬ���ܹ�ʵ�����������Ч��ȡ�����������������ȡ�㷨�����˴�ͳ�ǵ����㷨����Ҫ��Ϊȷ����ֵ�ȷ������裬ͬʱʹ�û�ģ�������ģ������Ƶ�����ͼ������ɴֵ�ϸ��ƥ�䣬����㷨�ľ�ȷ�Ժ�³���ԡ�Ϊ����ʶ������������λ����Ľ���ṩ��һ��ʮ�ָ�Ч�ķ�����
�ο����ף�
[1] LI Ji-yi, SHI Guang-shun, ZHENG Yan, et al. The research on offline palmprint identification.[C]//Proceedings of World Congress on Computer Science and Information Engineering. Los Angeles, 2009: 587-590.
[2] Indra D D, Sampantham B, Thiru G. An efficient security system based on gabor feature detector[C]//Proceedings of International Conference on Control, Automation, Communication and Energy conservation. Erode, 2009: 1-6.
[3] YUE Feng, ZUO Wang-meng, WANG Kuan-quan, et al. A performance evaluation of filter design and coding schemes for palmprint recognition[C]//Proceedings of the 19th International Conference on Pattern Recognition. Orlando, Florida, 2008: 1-4.
[4] LU Ji-wen, ZHAO Yong-wei, XUE Yan-xue, et al. Palmprint recognition via locality preserving projections and extreme learning machine neural network[C]//Proceedings of International Conference on the 9th Signal Processing. Beijing, 2008: 2096-2099.
[5] CHEN Jian-sheng, MOON Yiu-sang. Using SIFT feature in palmprint authentication[C]//Proceedings of the 19th International Conference on Pattern Recognition. Orlando, Florida, 2008: 1-4.
[6] Bole J R, Pankanti S. Biometrics: Personal identification in networked society[M]. Kluwer: Academic Publishers, 1999.
[7] ������, ��Ӣ��, �Ŵ���. ��������ʶ��ϵͳ��Ķ�λ�ָ��[J]. �㶫��ҵ��ѧѧ��, 2002, 19(1): 1-5.
DAI Qing-yun, YU Ying-lin, ZHANG Da-peng. The orientation and segmentation technologies in palmprint based identification systems[J]. Journal of Guangdong University Technology, 2002, 19(1): 1-5.
[8] Poon C, Wong D C M, Shen H C. A new method in locating and segmenting palmprint in the region-of-Interest[C]//Proceedings of the 17th International Conference on Pattern Recognition. Southampton, 2004, 4: 533-536.
[9] Zhang D, Kong W K, You J, et al. Online palmprint identification pattern analysis and machine intelligence[J]. IEEE Transactions, 2003, 25(9): 1041-1050.
[10] Connie T, Teoh A, Jin B, et al. An automated palmprint recognition system[J]. Image and Vision Computing, 2005, 23: 501-515.
(�༭ ����Ƽ)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ������ʡ�Ƽ���չ�ƻ���Ŀ(SC0701028)
ͨ�����ߣ�����(1968-)���У�����ũ���ˣ����ڣ����¼�����Ӿ�������ʶ�����о����绰��0431-85095308��E-mail��liufu@jlu.edu.cn

