基于模板匹配的目标识别算法
由霖,修春波
(天津工业大学 电气工程与自动化学院,天津,300160)
摘要:为提高现有模板匹配算法的有效性,提出一种新的模板匹配方法。匹配模板选用圆形结构,利用圆形模板的中心对称性,可使算法对识别结果具有旋转不变性。匹配准则函数由2部分组成,一部分通过环形模板与相应跟踪区域图像的各子窗口的匹配值获得图像的灰度匹配信息,并以此减小噪声对匹配结果的影响;另一部分通过计算图像的微分值获得微分图像,通过计算各子窗口微分匹配值来增强匹配过程中图像的细节信息的作用,并以此抑制光照变化对识别结果的影响。利用该方法对复杂背景下的移动目标进行识别跟踪。仿真结果表明,该方法对噪声、光照变化等影响具有很好的抑制作用,能够提高识别的精度和准确性。在某电视跟踪系统中的应用结果表明,该方法能够满足跟踪系统实时性的要求。
关键词:模板匹配;目标识别;微分;匹配准则
中图分类号:TP301.6 文献标志码:A 文章编号:1672-7207(2011)S1-0737-04
Target recognition algorithm based on template matching
YOU Lin, XIU Chun-bo
(School of Electrical Engineering and Automation, Tianjin Polytechnic University, Tianjin 300160, China)
Abstract: A new template matching method was proposed to improve the effectiveness. The matching template was of round structure. The center symmetric property of round template could make the algorithm have rotation invariant. The matching criterion function contained two components. One was the gray matching value between template sub-windows and image sub-windows, which could reduce the influence of noise. And the other was differential matching value of differential images, which represented texture information of images and could help to reduce the influence of illumination. Target recognition in complex background is realized by the method. Simulation results show that the method has a good recognition accuracy, and can restrain the impact of noise and illumination. Results of its application in the TV tracking system show that it can meet the demand of real time of the tracking system.
Key words: template matching; target recognition; differential; matching criterion
目标识别与跟踪技术在工业生产、智能交通、国防军事等诸多领域有着十分广泛的用途[1-4],因此也成为国内外研究的热点问题之一[5-7]。由于目标识别与跟踪系统通常既要考虑识别的准确性,同时又要保证实时性,因此要求算法在较小计算量的情况下,具有较强的识别能力[8-11]。目前,已有多种方法用于目标识别与跟踪领域,例如背景光流法、背景差分法、相邻帧差分法、特征点匹配法、模板匹配法等[12-15]。在这些方法中,模板匹配方法由于具有对目标的知识要求较少、计算形式简单等优点得到了广泛的应用。但传统的模板匹配算法具有一定的不足。例如,算法对于目标的几何和灰度畸变十分敏感,不具有旋转不变性,易于产生累计误差等。本文作者针对模板匹配算法的特点,提出一种改进的算法,在匹配准则中加入目标图像的微分信息,提高模板匹配的准确性。同时,选用圆形模板,确保算法具有旋转不变性。通过仿真实验验证了算法的有效性。
1 模板匹配算法
模板匹配属于相关匹配算法,包含目标图像的模板在搜索区中滑动,按一定的准则计算模板图像与其覆盖区图像的相关值,匹配最好的区域的中心即可认为是目标的中心。灰度差的绝对平均值是一种简单的衡量2幅图像匹配程度的准则。设模板A大小为M×N,搜索区中同样大小图像B与A的MAD距离D按式(1)计算:
 (1)
(1)
式中:ai,j和bi,j分别为模板图像A与覆盖区图像B的灰度。在搜索区中D最小处即为匹配点。从上述匹配结果可以看出:该算法对噪声、光照影响敏感,同时,不具有旋转不变性等性质。因此,在实际应用中经常发生误匹配和目标丢失等情况。
为此选用N×N的圆形模板,以圆形模板为中心,向外可扩展为(N+1)/2个子圆模板。第1个子圆为模板的中心像素点,第2个子圆为3×3的像素区,……。
按式(2)和(3)得到匹配值D1:
 (2)
(2)
 (3)
(3)
式中:ei为圆形模板中第i个子圆内像素和的匹配误差;αi为第i个子圆匹配的加权系数,表征了不同的子圆在匹配准则中的作用权重。
从上述匹配准则可以看出:由于圆形模板具有中心对称性,因此采用圆形模板可使得目标识别结果具有旋转不变性。同时,在各子圆像素累加过程中,可对噪声起到一定的平滑滤波作用,从而减少噪声对识别结果的影响。但这种累加操作也同时造成了匹配准则丢失大量模板图像的细节信息,容易造成识别结果的误匹配。为此,在考虑模板图像细节信息的基础上,生成原始图像的微分图像,按式(4)和(5)设计了第2个匹配准则函数D2:
 (4)
(4)
 (5)
(5)
式中:Dah,q和Dbh,q分别为微分图像中代表图像细节信息的微分值;Dei为第i个子圆微分图像的匹配值;βi为第i个子圆微分匹配的加权系数。
以3×3的模板为例,设原图像的像素分布如图1所示,生成的微分图像的微分值分布如图2所示,则微分图像的微分值按式(6)~(8)求取。
 (6)
(6)
 (7)
(7)
 (8)
(8)
图1 模板图像
Fig.1 Template image
图2 模板微分图像
Fig.2 Template differential image
由上述求取过程可见,微分图像的微分值是围绕原图像的中心点按照相邻像素的差分求得的。这样,匹配准则函数D2就包含了目标图像的微分信息,同时,由于微分图像的生成过程仍然保持了圆形模板的中心对称性,因此,匹配结果仍然具有旋转不变性。
利用上述2种匹配准则函数加权求和的形式可构造出最终的匹配准则函数,如式(9)所示:
 (9)
(9)
式中:w1和w2为2种匹配准则的加权系数。由于D1和D2这2个匹配准则都保持了圆形模板的中心对称性,因此最终的匹配准则也具有旋转不变性;同时,增加了匹配图像的微分信息,对光照影响具有一定的抑制作用,可提高目标识别的准确性。
2 仿真实验
采用本文提出的方法和传统的模板匹配方法对行进中的目标图像进行识别跟踪,所得结果如图3所示。图3中白色的方框位置为本文算法所得识别结果,白色十字位置为采用传统模板匹配跟踪方法所得识别结果。
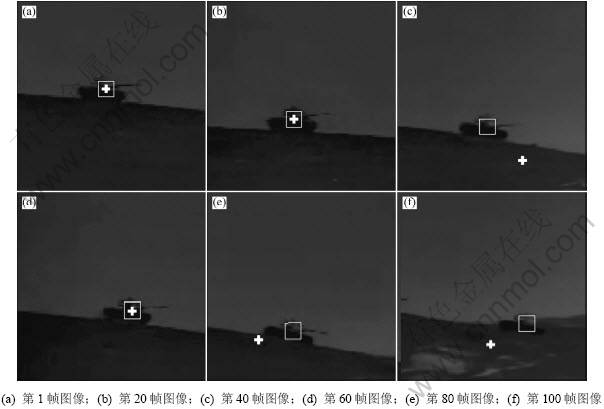
图3 行进中的目标识别与跟踪结果
Fig.3 Moving target recognition and tracking results
由实验结果可见,目标在行进过程中,由于路面的不平整等原因会发生小角度的旋转等运动;同时,不同时刻图像的光照会产生差别,这对传统的模板匹配跟踪方法产生影响,在跟踪过程中容易出现目标丢失以及误匹配等情况。而本文方法由于具有旋转不变性,同时,对噪声以及光照变化等具有抑制作用,因此获得了更好的识别结果。
将本文方法应用于某电视跟踪系统中,对飞行目标进行识别跟踪的误差曲线如图4和图5所示。
电视跟踪系统采用PID控制算法,利用本文算法可完成运动目标的检测与定位跟踪。在跟踪过程中,由于目标运动具有随机性,因此,当仅采用PID控制算法时存在一定的跟踪误差,但跟踪误差不大,可保证在整个跟踪过程中目标不丢失。
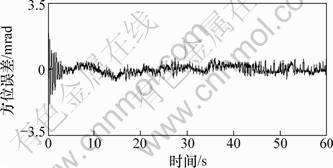
图4 方位误差跟踪曲线
Fig.4 Azimuth tracking error curve
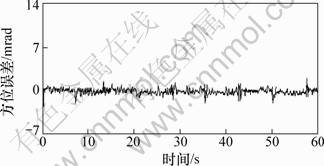
图5 俯仰误差跟踪曲线
Fig.5 Pitching tracking error curve
3 结论
本文针对传统模板匹配方法的缺点与不足,提出一种新的模板匹配准则,利用圆形模板的中心对称性确保了算法具有旋转不变性,利用图像的微分匹配结果提高了目标识别的准确性。大量的仿真实验表明,该方法可在比较复杂的背景环境中较准确地对目标进行识别和定位跟踪,跟踪效果良好。
参考文献:
[1] Lee K C, Ho J, Yang M H, et al. Visual tracking and recognition using probabilistic appearance manifolds[J]. Computer Vision and Image Understanding, 2005, 99(3): 303-331.
[2] Ge S S, Yang Y, Lee T H. Hand gesture recognition and tracking based on distributed locally linear embedding[J]. Image and Vision Computing, 2008, 26(12): 1607-1620.
[3] Tai J C, Tseng S T, Lin C P, et al. Real-time image tracking for automatic traffic monitoring and enforcement applications[J]. Image and Vision Computing, 2004, 22(6): 485-501.
[4] Kuo H C, Wu L J. An image tracking system for welded seams using fuzzy logic[J]. Journal of Materials Processing Technology, 2002, 120(1/3): 169-185.
[5] Kang S, Lee S W. Real-time tracking of multiple objects in space-variant vision based on magnocellular visual pathway[J]. Pattern Recognition, 2002, 35(10): 2031-2040.
[6] Shaik J, Iftekharuddin K M. Detection and tracking of targets in infrared images using Bayesian techniques[J]. Optics & Laser Technology, 2009, 41(6): 832-842.
[7] Ukita N, Matsuyama T. Real-time cooperative multi-target tracking by communicating active vision agents[J]. Computer Vision and Image Understanding, 2005, 97(2):137-179.
[8] Li H, Duan H B, Zhang X Y. A novel image template matching based on particle filtering optimization[J]. Pattern Recognition Letters, 2010, 31(13): 1825-1832.
[9] Liu L F, Sclaroff S. Index trees for accelerating deformable template matching[J]. Pattern Recognition Letters, 2002, 23(12): 1483-1493.
[10] Kang C C, Wang W J. A novel edge detection method based on the maximizing objective function[J]. Pattern Recognition, 2007, 40(2): 609-618.
[11] Fredriksson K, M?kinen V, Navarro G. Rotation and lighting invariant template matching[J]. Information and Computation, 2007, 205(7): 1096-1113.
[12] Wang Z L, Yan F X, He F, et al. Missile target automatic recognition from its decoys based on image time-series[J]. Pattern Recognition, 2010, 43(6): 2157-2164.
[13] Meribout M, Nakanishi M, Ogura T. A parallel algorithm for real-time object recognition[J]. Pattern Recognition, 2002, 35(9): 1917-1931.
[14] Choi M S, Kim W Y. A novel two stage template matching method for rotation and illumination invariance[J]. Pattern Recognition, 2002, 35(1): 119-129.
[15] Ravichandran B, Gandhe A, Smith R, et al. Robust automatic target recognition using learning classifier systems[J]. Information Fusion, 2007, 8(3): 252-265.
(编辑 杨华)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:天津市自然科学基金资助项目(10JCYBJC07200)
通信作者:修春波(1978-),男,黑龙江肇州人,博士,副教授,从事目标识别研究;电话:15620327378;E-mail:xiuchunbo@tjpu.edu.cn

