DOI: 10.11817/j.issn.1672-7207.2018.04.013
基于标准双边控制的改进力反馈遥操作方法
郑义东1,于劲松1,唐荻音1,陈小奇2
(1. 北京航空航天大学 自动化科学与电气工程学院,北京,100191;
2. 坎特伯雷大学 工程学院,新西兰 基督城,8042)
摘要:针对空间机器人遥操作过程中的通讯时延问题,提出一种改进的PD双边力反馈遥操作控制系统。首先从理论上推导该控制系统绝对稳定的条件。在保证系统稳定的前提下,进一步研究提高系统透明性的方法并给出控制参数的约束条件。通过与标准PD双边控制方法的对比实验以及固定时延与变时延2种不同条件下的仿真实验,验证该改进方法具有显著提高遥操作系统透明性和跟踪性能的作用。研究结果表明:所推导的稳定性条件和透明性分析结论进一步完善了该PD双边控制方法,可对复杂遥操作系统中应用该方法提供参考。
关键词:遥操作系统;PD双边控制;力反馈;稳定性分析;透明性分析
中图分类号:V412;TP242 文献标志码:A 文章编号:1672-7207(2018)04-0865-09
An improved force feedback method for teleoperation control system based on standard PD bilateral control
ZHENG Yidong1, YU Jinsong1, TANG Diyin1, CHEN Xiaoqi2
(1. School of Automation and Electrical Engineering, Beihang University, Beijing 100191, China;
2. College of Engineering, University of Canterbury, ChristChurch 8042, New Zealand)
Abstract: In order to handle communication time delay problem in space robot teleoperation, an improved proportion and differentiation (PD) bilateral force feedback method for teleoperation control system was proposed. The absolute stability condition was theoretically deduced at first. On the premise of stable conditions, the transparency was further studied and the constraint conditions of control parameters that guarantee the best transparency were derived. Two simulation experiments were conducted to verify the significant effect of the proposed method that improved the teleoperation system’s transparency and tracking performance. One was a comparison experiment between standard PD bilateral control method and the improved PD bilateral control method, and the other was performance analysis of stability and transparency during fixed time delay and variable time delay. The derived stability and transparency conditions were supported by the simulation results. They are able to improve the PD bilateral force feedback control method and provide reference to its application in complex teleoperation systems.
Key words: teleoperation technology; PD bilateral control; force feedback; stability analysis; transparency analysis
随着科技的进步与发展,人类的活动空间在不断扩展,各国对遥操作空间机器人应用的重视程度逐年增加[1-2]。近年来,美国、日本等一些国家对大时延遥操作技术进行了大规模的研究和实验,如欧洲航天局(ESA)研制了世界上第1个可从地面进行遥操作控制的空间机器人ROTEX[3-4];日本前宇宙开发事业集团(NASDA)研制了第1个能实现舱外自由飞行的空间机器人ETS-VII[5],它具有地面遥操作以及在轨自主控制的能力;美国国防部先进研究项目局(DARPA)研制了能够自主完成在轨服务的Orbital Express机器人[6];此外,还有我国于2013年底成功发射的“嫦娥三号”,将首个着陆器和“玉兔号”巡视器送抵月球,首次实现地外天体表面的无人自动巡视和月面就位科学探测。遥操作机器人能够在远距离或危险环境下执行未知或复杂任务,因此,在航空航天、深海勘探领域[7-8],核辐射、高压输电、易燃易爆等危险领域以及医疗手术、建筑施工等领域均取得了广泛应用[9-11]。遥操作系统的控制方法多种多样:监督控制主要采取遥编程的方式对从机械臂进行控制[12];基于事件的控制方法以与时间无关的参考变量(事件)代替时间作为信号的参考变量,能有效解决时延问题;线性二次最优控制理论将遥操作系统看成是一个具有状态或输出时延的反馈系统,通过设计相应的LQ控制器进行控制[13];基于H∞理论的控制方法可以将系统的扰动或者模型的不确定因素对系统的影响降低到期望的程度;基于滑模控制的方法可以保证基于互联网通信的遥操作系统具有较好的鲁棒性;基于虚拟现实的控制方法利用计算机图形及相关技术,生成一种虚拟环境并给用户提供逼真的视、听、触、力等多维感觉,是解决时延问题的重要手段[14];PID控制方法根据被控制变量的实际输出值与参考值之间的误差来调节控制器的输出,从而实现使被控制量的实际输出跟踪参考值。通讯时延问题是遥操作技术面临的主要难点之一,也是研究的一个热点方向[15-16]。目前,解决这一问题的主要方法有图形预测仿真技术和双边力反馈技术[17-19]。与图形预测仿真技术相比,双边力反馈技术具有如下优势:不要求远端操作环境为结构化或已知的环境;在通信线路中传送数据,降低了对通信带宽的要求;把从手与环境的作用力直接作用于操作者,将人的智能直接加入控制回路,具有较高的可靠性和安全性[20]。目前,双边遥操作控制结构主要有3种:位置-位置型、力-位置型以及力反馈-位置型。与前2种控制结构相比,力反馈-位置型控制结构可以显著提高遥操作系统力觉临场感的效果,改善主-从遥操作机器人系统的动态特性,使系统透明性提高。但是,在大时延情况下,这些控制方法都很难保证遥操作系统的稳定性及透明性[21-22]。本文作者提出一种改进的PD双边控制方法。与其他双边力反馈控制方法相比,该方法简单易行,便于设计,并且在保证系统稳定的前提下,能够极大提高系统的透明性。在此基础上,结合仿真实验进行验证,从而达到进一步完善PD双边控制方法的目的。
1 改进的PD双边控制方法
本文提出的PD双边控制方法是在标准二通道双边控制方法的基础上改进优化得来的。标准PD双边控制结构是一种典型的力反馈-位置型控制结构,其原理如图1所示。主从端分别用独立的PD控制器进行控制,前向传递和反向反馈的分别是主从手的位置信息。图中Fu和Fe分别为操作者施加的力和从手与环境的相互作用力;Xh和Xc分别为主从手的位置;T1和T2分别为由主端到从端的时延和由从端到主端的时延。
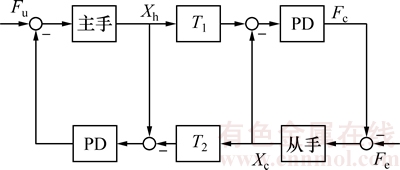
图1 标准PD双边控制原理图
Fig. 1 Schematic diagram of standard PD bilateral control
实验表明,当时延在2 s以上时,采用标准PD双边控制的遥操作系统虽然能够保持稳定,但是它的透明性却并不理想。在此基础上本文提出了一种改进的PD双边方法。
改进的PD控制器模型为
 (1)
(1)
式中:Kh和Kc分别为主端控制器和从端控制器的比例系数;Dh和Dc分别为主端控制器和从端控制器的微分系数。式(1)中的各项位置误差定义如下:
 (2)
(2)
式中:τhh和τcc分别为信息在主端和从端之间传输的往返时延;τhc和τch分别为信息由主端到从端和由从端到主端传输的单向时延。
当主手受到操作者的控制而向前运动时,会在从手坐标系中产生相对误差ecc,从手控制器会根据式(1)产生力Fc驱动从手运动。另一方面,从手将此误差ecc传递给主端,反馈回主端的位置误差为ehh,主端控制器根据此误差产生力Fh来感受从端的控制力,从而产生了临场感,提高了控制系统的透明性。
式(1)中的函数S(t)的取值被限定为0或1,它的作用是决定使用哪一个控制器来进行反馈,其计算公式如下:
 (3)
(3)
其中:
 (4)
(4)
式(3)中,增益a和b反映了控制器拾取外力的敏感度。a越大,控制器透明性就越好;b越大,控制器对外力就越敏感。常数c的作用是当控制器未激活时将系统逐渐变为完全透明的双边遥操作系统。
当从手产生位移并从系统中带走能量时,函数A(t)的存在使得S(t)减小,进而使得系统无源。主从端位置误差的产生主要有2个原因:一是当主手运动时,从手还未到达相应位置,二是当从端有障碍存在时,在障碍处从手会停止运动。函数B(t)的作用便是通过微分函数来辨别这2种情况。函数C(t)的主要作用是通过观测主手在传输时延内的运动量从而将时延因素考虑进去。例如,在大时延存在的情况下,当主手迅速移动时,会有1个显著的力反馈给主端操作者,函数C(t)可以通过预测此位移量来减小反馈力,以此来保持系统的稳定性。
2 方法的稳定性分析
遥操作系统的性能主要包括稳定性和透明性2个方面。稳定性是控制系统发挥作用的基本前提,是所有的控制系统必须满足的条件。系统稳定可以简单地理解为包括操作者和从端环境在内的整个控制系统的状态变量始终有界。本节就改进PD双边控制系统的稳定性进行分析,并推导出控制系统的绝对稳定性条件。
2.1 稳定性判据
常用的稳定性判据有无源性判据和绝对稳定性判据,理论上可以证明无源稳定性是绝对稳定性的充分不必要条件[23],因此绝对稳定性判据可以降低系统的保守性,应用更加广泛。Llewellyn绝对稳定判据是其中较为常见的一种[24]。
Llewellyn绝对稳定判据:对于一个线性时不变的二端口网络系统 ,当且仅当符合下列条件时,该系统是绝对稳定的:
,当且仅当符合下列条件时,该系统是绝对稳定的:
1)  和
和 在复平面的右半平面上没有极点;
在复平面的右半平面上没有极点;
2) 和在复平面的虚轴上的极点是不对称的,且与之对应的留数均为正实数;
3)  ;
;
4)  ;
;
5)  。
。
2.2 稳定性分析
函数S(t)的取值被限定为0或1,下面分别对S(t)取不同值时的控制系统进行分析。
当S(t)=1时,遥操作系统的二端口网络模型为


 (5)
(5)
根据Llewellyn准则,可以推导出系统绝对稳定的条件:
 (6)
(6)
 (7)
(7)
 (8)
(8)
令 并设Kc=1,Dc=0.5,T1=T2=3 s,可以得到y1关于频率ω的变化情况,如图2所示。
并设Kc=1,Dc=0.5,T1=T2=3 s,可以得到y1关于频率ω的变化情况,如图2所示。
从图2可以看出:对于固定的Kc和Dc,y1是有界的,因此,只要选择的Kc和Dc合适,不等式(7)总是可以满足的。
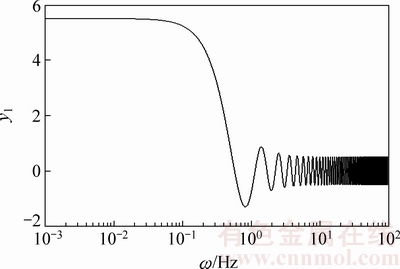
图2 y1关于频率ω的变化曲线
Fig. 2 Curves of y1 changing with ω
式(8)可以表示为


 (9)
(9)
令
 (10)
(10)
设Kc=Kh=1,T1=T2=3 s,Dc=Dh=0.5,bh=1,可以得到y2关于频率ω的变化情况,如图3所示。
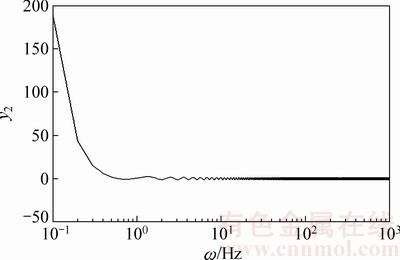
图3 y2关于ω的变化曲线
Fig. 3 Curves of y3 changing with ω
当Kc,Kh,Dc和Dh固定时,函数y2的取值在整个频率范围内是有界的,因此,只要选择合适的参数Kc,Kh,Dc和Dh,就可使得不等式(9)得到满足。
当S(t) =0时,遥操作系统的二端口网络模型为

 (11)
(11)
式中:mh和mc分别为主手和从手的质量;bh和bc分别为主手和从手的阻尼。
根据Llewellyn准则,可以推导出系统绝对稳定的条件为:
 (12)
(12)
 (13)
(13)

 (14)
(14)
同理,只要选择合适的参数Kc,Kh,Dc和Dh,就可使得上述不等式(12),(13)和(14)成立,从而保证遥操作系统的绝对稳定。
3 方法的透明性分析
透明性是评价遥操作系统性能的另一重要指标。双边力反馈控制系统中,从端将其与环境相互作用的力信息反馈给主端,操作者便可以根据此反馈力感受到从端环境的状态,这就是遥操作系统的临场感。系统的透明性是用来衡量系统临场感质量的,透明性越好,系统的临场感就越好。通常用主端操作者感受到的阻抗和环境阻抗之间的关系来衡量。定义操作者感受到的阻抗为Zh=Fh/xh,环境的实际阻抗为Ze=Fe/xc,因此,可以用Zh和Ze之间的相似程度来衡量透明性。它们的相似度越高,系统的透明性越好,在理想情况下有Zh=Ze。本节从透明性方面对改进PD双边控制系统进行分析,并与前文稳定性条件进行对比,推导出在保证稳定性的前提下使系统获得最佳透明性的参数条件。
当S(t)=1时,系统主从手运动学模型及PD控制模型为
 (15)
(15)
此时的主端阻抗为

 (16)
(16)
通过幂级数展开将其化为如下形式:
 (17)
(17)
 (18)
(18)
其中:Meq为主端操作者感受到的等效惯量;Beq为等效阻尼;Keq为等效刚度; 满足
满足 ,它包含了s的高阶项部分,在低频运动下可忽略不计,A1,A2和A3可通过下列方程解出:
,它包含了s的高阶项部分,在低频运动下可忽略不计,A1,A2和A3可通过下列方程解出:
 (19)
(19)
系统透明性最佳时,应有Zh=Ze。令式(17)与从端阻抗 的对应项相等,可得:
的对应项相等,可得:
 (20)
(20)
 (21)
(21)
 (22)
(22)
为简化计算,假设信息在主从端传递的单向时延相等,即T1=T2=T。不失一般性,将主从端及环境模型的各参数设为:mh=mc=me=0.5 kg,bh=bc=be=0.5 kg/s,ke=0.5 N/m。其中m和b分别表示质量和阻尼;k为弹性系数。将式(20),(21)和(22)与系统稳定条件(6),(7)和(8)联立,以Kc,Dc和T为自变量利用MATLAB画出其三维空间图。
由图4可见:透明性最优约束与系统稳定域是有交集的,说明可以在该稳定域内找到使系统透明性最佳的参数取值。当S(t) =0时,可以相同的方法得到最佳参数取值的约束条件。

图4 系统稳定性与透明性的参数约束关系
Fig. 4 Parameter constraints between system stability and transparency
4 仿真实验
为了更直观地表现改进PD双边控制方法的控制效果以及验证前两节理论推导结果的正确性,本节对大时延下采用改进PD双边控制方法控制的遥操作系统进行仿真。由于在实际工程中,时延并不是一个固定不变的常数,而是随着时间动态变化的,因此,本节除了固定时延的情况外,还将对变时延情况下的遥操作系统进行仿真。
4.1 固定时延仿真结果
利用simulink工具对改进PD双边控制系统进行仿真。其中,主从手的质量和阻尼分别设置为mh=0.5 kg,bh=0.2 kg/s,mc=0.5 kg,bc=0.2 kg/s。为简单起见,将环境模型设为二阶质量-弹簧-阻尼系统:
 (23)
(23)
其中:me=0.05 kg,be=0.025 kg/s,ke=0.125 N/m。系统单边时延设为T1=T2=2 s。
仿真结果如图5所示。图5(a)和(b)所示分别为从手与环境接触运动时主从手的运动位置曲线和力曲线,图5(c)和(d)所示分别为从手自由运动时主从手的运动位置曲线和力曲线。从图5(a)和(c)可以看出:无论从手是自由运动还是与环境接触运动,主从手的运动位置曲线均是有界的,并未发生振荡发散现象,这表明遥操作系统是稳定的,而主从手运动位置曲线的拟合程度则表征着系统的跟踪性能。当从手基本能够跟踪主手进行位移运动时,可近似用主端感受到的反馈力Fh和从端与环境之间的作用力Fe来衡量系统的透明性。从图5(b)可以看出:Fh与Fe十分接近,相似度极高,系统的临场感非常好。当从手自由运动时,从图5(d)可以看出主端感受力Fh并不杂乱,这也表明了系统的透明性较好。可见,当按照上文推出的参数约束条件选取控制参数时,改进PD双边控制方法的控制效果比较理想。
图6所示为标准PD双边控制与改进PD双边控制方法的透明性对比。从图6可以看出:图6(b)中主从端阻抗的拟合度更好,这表明改进的PD双边控制系统的透明性更好,优于标准PD双边控制系统。
4.2 变时延仿真结果
为了验证前文推导的稳定性与透明性条件对于一些复杂情况下系统控制参数的选取是否适用,在以上实验基础上,将固定时延改为在1.5~2.5 s之间随机变化的时变时延,图7所示为其仿真结果。
从图7可以看到:在变时延情况下,系统的稳定性依旧能够得到保证;透明性虽然有所下降,但仍然保持在较高的水平。
为验证系统控制参数对遥操作系统性能的影响,本文进行了另一组控制参数不满足稳定条件时的仿真实验,仿真结果如图8所示。
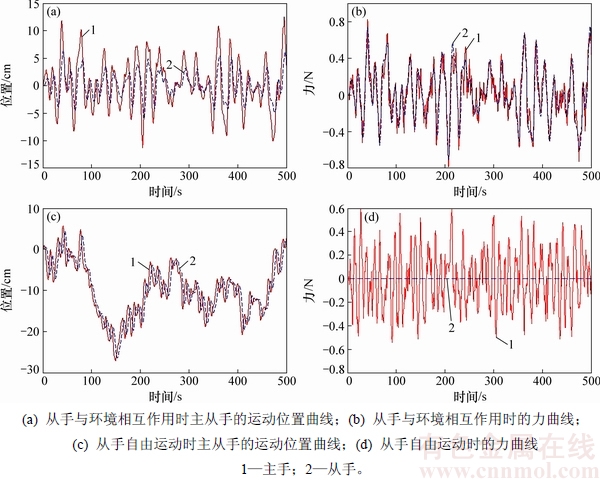
图5 2 s固定时延时的仿真结果
Fig. 5 Simulation results when time delay is fixed to 2 s
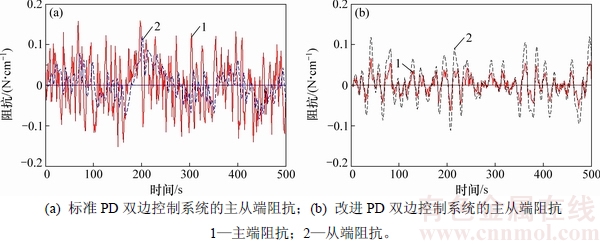
图6 标准PD双边控制与改进PD双边控制方法的透明性对比
Fig. 6 Transparency comparison between standard PD bilateral control method and improved PD bilateral control method
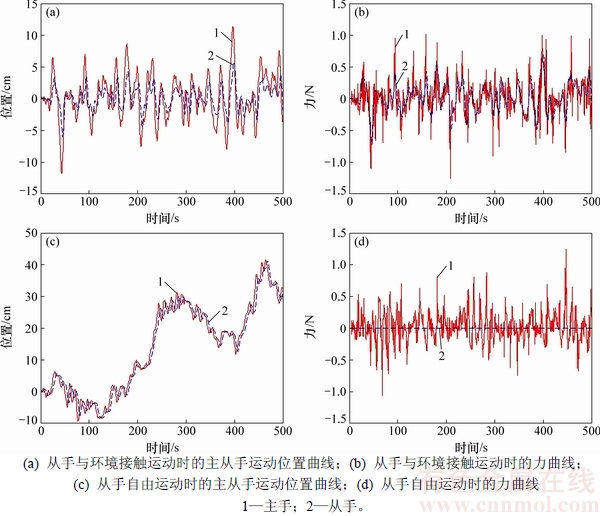
图7 1.5~2.5 s变时延时的仿真结果
Fig. 7 Simulation results when time delay is fluctuating between 1.5 s and 2.5 s
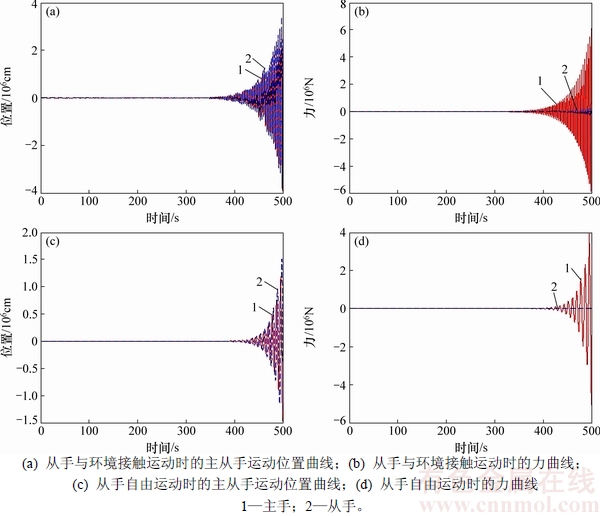
图8 控制参数不满足稳定条件时的仿真结果
Fig. 8 Simulation results when control parameters do not meet stability conditions
由图8可见:主从手的运动位置曲线随着仿真时间的推进出现了振荡发散现象,说明此时系统是极其不稳定的,从而验证了系统稳定性分析结果的正确性。
4.3 跟踪性能对比仿真结果
图9和图10所示分别为标准PD控制方法和改进PD控制方法在相同条件下主从手的运动情况对比。
双边控制系统的跟踪性定义为从手跟踪T1时刻前主手运动的精度(其中T1表示由主端到从端的时延),在仿真曲线上则表现为从手位置跟踪主手位置的误差,误差越小,则系统的跟踪性能越好。
从图9和图10可以看出:无论从手处于自由运动还是与环境接触运动,改进PD控制方法下从手跟踪主手运动的能力均比标准PD控制方法时的好,说明改进PD控制方法的系统跟踪性能相比于标准PD控制得到提高。

图9 从手与环境接触运动时的主从手运动位置曲线
Fig. 9 Movement curves of mater hand and slave hand when slave hand contacting with environment
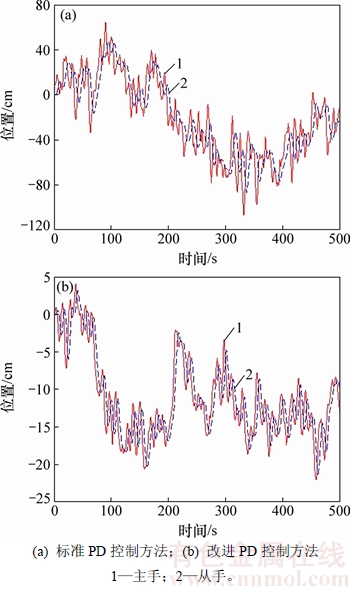
图10 从手自由运动时的主从手运动位置曲线
Fig. 10 Movement curves of master hand and slave hand when slave hand moving freely
5 结论
1) 根据Llewellyn绝对稳定判据推导出系统绝对稳定的条件,在此基础上根据系统透明性定义推导出了在保证稳定的前提下,系统获得最佳透明性应满足的条件。
2) 仿真实验验证了推导的参数约束方程的正确性。改进的PD双边控制方法对于固定时延和时变时延均具有很好的适应性,能够在保证遥操作系统稳定的同时使得系统的透明性显著提高。
3) 改进的PD双边控制方法相比于标准PD控制方法能够使遥操作系统的跟踪性能进一步提高。
参考文献:
[1] MERSHA A Y, STRAMIGIOLI S, CARLONI R. On bilateral teleoperation of aerial robots[J]. IEEE Transactions on Robotics, 2014, 30(1): 258-274.
[2] REBELO J, SEDNAOUI T, DEN EXTER E B, et al. Bilateral robot teleoperation: A wearable arm exoskeleton featuring an intuitive user interface[J]. IEEE Robotics & Automation Magazine, 2014, 4(21): 62-69.
[3] BRUNNER B, HIRZINGER G, LANDZETTEL K, et al. Multisensory shared autonomy and tele-sensor- programming-key issues in the space robot technology experiment ROTEX[C]//Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 1993: 2123-2139.
[4] HIRZINGER G, BRUNNER B, DIETRICH J, et al. Sensor-based space robotics-ROTEX and its telerobotic features[J]. IEEE Transaction on Robotics and Automation, 1993, 9(5): 649-663.
[5] IMAIDA T, YOKOKOHJI Y, DOI T, et al. Ground-space bilateral teleoperation of ETS-VII robot arm by direct bilateral coupling under 7s time delay condition[J]. IEEE Transactions on Robotics and Automation, 2004, 20(3): 499-511.
[6] 刘进军. 轨道快车―卫星拯救者[J]. 卫星电视与宽带多媒体, 2007, 21(4): 40-42.
LIU Jinjun. Orbital express-the savior of satellites[J]. Satellite TV & IP Multimedia, 2007, 21(4): 40-42.
[7] VOZAR S, LEONARD S, KAZANZIDES P, et al. Experimental evaluation of force control for virtual-fixture-assisted teleoperation for on-orbit manipulation of satellite thermal blanket insulation[C]//2015 IEEE International Conference on Robotics and Automation(ICRA). Seattle: IEEE, 2015: 4424-4431.
[8] WILDE M, CHUA Z K, FLEISCHNER A. Effects of multivantage point systems on the teleoperation of spacecraft docking[J]. IEEE Transactions on Human-Machine Systems, 2014, 44(2): 200-210.
[9] MUKHERJEE J K. Fast visualization technique for view constrained teleoperation in nuclear industry[C]//2014 International Conference on Information Science and Applications(ICISA). Seoal: IEEE, 2014: 1-4.
[10] NISKY I, HSIEH M H, OKAMURA A M. Uncontrolled manifold analysis of arm joint angle variability during robotic teleoperation and freehand movement of surgeons and novices[J]. IEEE Transactions on Biomedical Engineering, 2014, 61(12): 2869-2881.
[11] PACCHIEROTTI C, ABAYAZID M, MISRA S, et al. Teleoperation of steerable flexible needles by combining kinesthetic and vibratory feedback[J]. IEEE Transactions on Haptics, 2014, 7(4): 551-556.
[12] AI-MOUHAMED M, NAZEERUDDIN M, MERAH N. Design and instrumentation of force feedback in telerobotics[J]. IEEE Transactions on Instrumentation and Measurement, 2009, 58(6): 1949-1957.
[13] BACOCCO R, MELCHIORRI C. LQ control design of cooperative teleoperation system[C]//Proceedings 2009 14th International Conference on Advanced Robotics. Tokyo: IEEE, 2009: 490-495.
[14] 胡凌燕. 时延力反馈遥操作系统的跟踪性能及稳定性研究[D]. 江西: 南昌大学机电工程学院, 2011: 4-9.
HU Lingyan. Trajectory tracking and stability of teleoperator with time delay and force feedback[D]. Jiangxi: Nanchang University. School of Mechanical and Electrical Engineering, 2011: 4-9.
[15] 陈俊杰. 空间机器人遥操作克服时延影响的研究进展[J]. 测控技术, 2007, 26(2): 1-5.
CHEN Junjie. Research headway of overcoming time-delay infection for teleoperation of space robot[J]. Measurement and Control Technology, 2007, 26(2): 1-5.
[16] NIEMEYER G, SLOTINE J E. Telemanipulation with time delays[J]. The International Journal of Robotics Research, 2004, 23(9): 873-890.
[17] 贾庆轩, 高欣, 孙汉旭, 等. 面向机器人遥操作的预测图形仿真技术[J]. 航空制造技术, 2011(7): 60-63.
JIA Qingxuan, GAO Xin, SUN Hanxu, et al. Predictive graphical simulation technology for robot teleoperation[J]. Aeronautical Manufacturing Technology, 2011(7): 60-63.
[18] 王学谦, 梁斌, 李成, 等. 自由飞行空间机器人遥操作三维仿真系统研究[J]. 宇航学报, 2009, 30(1): 402-408.
WANG Xueqian, LIANG Bin, LI Cheng, et al. Study on three dimensional predictive simulation system of teleoperation for free flying space robot[J]. Journal of Astronautics, 2009, 30(1): 402-408.
[19] 邓启文, 韦庆, 李泽湘. 大时延力反馈双边控制系统[J]. 机器人, 2005, 27(5): 410-413.
DENG Qiwen, WEI Qing, LI Zexiang. Force-reflection bilateral control system with large time delay[J]. Robot, 2005, 27(5): 410-413.
[20] 张涛, 陈章, 王学谦, 等. 空间机器人遥操作关键技术综述与展望[J]. 空间控制技术与应用, 2014, 40(6): 1-9.
ZHANG Tao, CHEN Zhang, WANG Xueqian, et al. Overview and prospect of key technologies of teleoperation of space robot[J]. Aerospace Control and Application, 2014, 40(6): 1-9.
[21] 邓启文, 韦庆, 李泽湘. 力反馈时延遥操作系统的时延相关稳定性分析[J]. 控制理论与应用, 2007, 24(5): 815-818.
DENG Qiwen, WEI Qing, LI Zexiang. Analysis of delay-dependent stability for time-delay teleoperating systems with force-reflection[J]. Control Theory and Applications, 2007, 24(5): 815-818.
[22] DENG Qiwen, WEI Qing, LI Zexiang. Improving the transparency of teleoperating system[C]//Proceedings of the 25th Chinese Control Conference. Harbin: IEEE Press, 2006: 861-866.
[23] 李宽. 基于绝对稳定性的空间机器人遥操作算法研究[D]. 湖南: 国防科学技术大学控制科学与工程学院, 2007: 21-22.
LI Kuan. Research on control algorithms of space robot teleoperation based on the absolute stability[D]. Hunan: National University of Defense Technology. School of Control Science and Control Engineering, 2007: 21-22.
[24] 刘威, 宋爱国. 基于虚拟现实的力觉临场感系统及其稳定性分析[J]. 仪器仪表学报, 2006, 27(z2): 1090-1093.
LIU Wei, SONG Aiguo. Force-reflecting teleoperation system based on virtual reality and its stability analyse[J]. Chinese Journal of Scientific Instrument, 2006, 27(z2): 1090-1093.
(编辑 杨幼平)
收稿日期:2017-05-15;修回日期:2017-07-16
基金项目(Foundation item):国家自然科学基金资助项目(71701008)(Project(71701008) supported by the National Natural Science Foundation of China)
通信作者:于劲松,博士,副教授,从事虚拟仪器及自动测试系统、智能诊断技术、预测与健康管理技术研究;E-mail:yujs@buaa.edu.cn

