
DOI: 10.11817/j.issn.1672-7207.2018.04.013
���ڱ�˫�߿��ƵĸĽ�������ң��������
֣�嶫1���ھ���1����ݶ��1����С��2
(1. �������պ����ѧ �Զ�����ѧ���������ѧԺ��������100191��
2. ���ز��״�ѧ ����ѧԺ�������� �����ǣ�8042)
ժ Ҫ��
ң���������е�ͨѶʱ�����⣬���һ�ָĽ���PD˫��������ң��������ϵͳ�����ȴ��������Ƶ��ÿ���ϵͳ�����ȶ����������ڱ�֤ϵͳ�ȶ���ǰ���£���һ���о����ϵͳ���Եķ������������Ʋ�����Լ��������ͨ�����PD˫�߿��Ʒ����ĶԱ�ʵ���Լ��̶�ʱ�����ʱ��2�ֲ�ͬ�����µķ���ʵ�飬��֤�øĽ����������������ң����ϵͳ���Ժ������ܵ����á��о�������������Ƶ����ȶ������������Է������۽�һ�������˸�PD˫�߿��Ʒ������ɶԸ���ң����ϵͳ��Ӧ�ø÷����ṩ�ο���
�ؼ��ʣ�
ң����ϵͳ��PD˫�߿��������������ȶ��Է��������Է�����
��ͼ����ţ�V412��TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2018)04-0865-09
An improved force feedback method for teleoperation control system based on standard PD bilateral control
ZHENG Yidong1, YU Jinsong1, TANG Diyin1, CHEN Xiaoqi2
(1. School of Automation and Electrical Engineering, Beihang University, Beijing 100191, China;
2. College of Engineering, University of Canterbury, ChristChurch 8042, New Zealand)
Abstract: In order to handle communication time delay problem in space robot teleoperation, an improved proportion and differentiation (PD) bilateral force feedback method for teleoperation control system was proposed. The absolute stability condition was theoretically deduced at first. On the premise of stable conditions, the transparency was further studied and the constraint conditions of control parameters that guarantee the best transparency were derived. Two simulation experiments were conducted to verify the significant effect of the proposed method that improved the teleoperation system��s transparency and tracking performance. One was a comparison experiment between standard PD bilateral control method and the improved PD bilateral control method, and the other was performance analysis of stability and transparency during fixed time delay and variable time delay. The derived stability and transparency conditions were supported by the simulation results. They are able to improve the PD bilateral force feedback control method and provide reference to its application in complex teleoperation systems.
Key words: teleoperation technology; PD bilateral control; force feedback; stability analysis; transparency analysis
���ſƼ��Ľ����뷢չ������Ļ�ռ��ڲ�����չ��������ң�����ռ������Ӧ�õ����ӳ̶���������[1-2]�����������������ձ���һЩ���ҶԴ�ʱ��ң�������������˴��ģ���о���ʵ�飬��ŷ�����(ESA)�����������ϵ�1���ɴӵ������ң�������ƵĿռ������ROTEX[3-4]���ձ�ǰ���濪����ҵ����(NASDA)�����˵�1����ʵ�ֲ������ɷ��еĿռ������ETS-VII[5]�������е���ң�����Լ��ڹ��������Ƶ������������������Ƚ��о���Ŀ��(DARPA)�������ܹ���������ڹ�����Orbital Express������[6]�����⣬�����ҹ���2013��׳ɹ�����ġ��϶����š���������½���͡����úš�Ѳ�����͵������״�ʵ�ֵ����������������Զ�Ѳ�Ӻ������λ��ѧ̽�⡣ң�����������ܹ���Զ�����Σ�ջ�����ִ��δ֪����������ˣ��ں��պ��졢���̽����[7-8]���˷��䡢��ѹ��硢��ȼ�ױ���Σ�������Լ�ҽ������������ʩ���������ȡ���˹㷺Ӧ��[9-11]��ң����ϵͳ�Ŀ��Ʒ������ֶ������ල������Ҫ��ȡң��̵ķ�ʽ�Դӻ�е�۽��п���[12]�������¼��Ŀ��Ʒ�������ʱ���صIJο�����(�¼�)����ʱ����Ϊ�źŵIJο�����������Ч���ʱ�����⣻���Զ������ſ������۽�ң����ϵͳ������һ������״̬�����ʱ�ӵķ���ϵͳ��ͨ�������Ӧ��LQ���������п���[13]������H�����۵Ŀ��Ʒ������Խ�ϵͳ���Ŷ�����ģ�͵IJ�ȷ�����ض�ϵͳ��Ӱ�콵�͵������ij̶ȣ����ڻ�ģ���Ƶķ������Ա�֤���ڻ�����ͨ�ŵ�ң����ϵͳ���нϺõ�³���ԣ�����������ʵ�Ŀ��Ʒ������ü����ͼ�μ���ؼ���������һ������������û��ṩ������ӡ������������ȶ�ά�о����ǽ��ʱ���������Ҫ�ֶ�[14]��PID���Ʒ������ݱ����Ʊ�����ʵ�����ֵ��ο�ֵ֮�����������ڿ�������������Ӷ�ʵ��ʹ����������ʵ��������ٲο�ֵ��ͨѶʱ��������ң�����������ٵ���Ҫ�ѵ�֮һ��Ҳ���о���һ���ȵ㷽��[15-16]��Ŀǰ�������һ�������Ҫ������ͼ��Ԥ����漼����˫������������[17-19]����ͼ��Ԥ����漼����ȣ�˫�����������������������ƣ���Ҫ��Զ�˲�������Ϊ�ṹ������֪�Ļ�������ͨ����·�д������ݣ������˶�ͨ�Ŵ�����Ҫ�Ѵ����뻷����������ֱ�������ڲ����ߣ����˵�����ֱ�Ӽ�����ƻ�·�����нϸߵĿɿ��ԺͰ�ȫ��[20]��Ŀǰ��˫��ң�������ƽṹ��Ҫ��3�֣�λ��-λ���͡���-λ�����Լ�������-λ���͡���ǰ2�ֿ��ƽṹ��ȣ�������-λ���Ϳ��ƽṹ�����������ң����ϵͳ�����ٳ��е�Ч����������-��ң����������ϵͳ�Ķ�̬���ԣ�ʹϵͳ������ߡ����ǣ��ڴ�ʱ������£���Щ���Ʒ��������ѱ�֤ң����ϵͳ���ȶ��Լ�����[21-22]�������������һ�ָĽ���PD˫�߿��Ʒ�����������˫�����������Ʒ�����ȣ��÷��������У�������ƣ������ڱ�֤ϵͳ�ȶ���ǰ���£��ܹ��������ϵͳ�����ԡ��ڴ˻����ϣ���Ϸ���ʵ�������֤���Ӷ��ﵽ��һ������PD˫�߿��Ʒ�����Ŀ�ġ�
1 �Ľ���PD˫�߿��Ʒ���
���������PD˫�߿��Ʒ������ڱ���ͨ��˫�߿��Ʒ����Ļ����ϸĽ��Ż������ġ���PD˫�߿��ƽṹ��һ�ֵ��͵�������-λ���Ϳ��ƽṹ����ԭ����ͼ1��ʾ�����Ӷ˷ֱ��ö�����PD���������п��ƣ�ǰ�ݺͷ������ķֱ��������ֵ�λ����Ϣ��ͼ��Fu��Fe�ֱ�Ϊ������ʩ�ӵ����ʹ����뻷�������������Xh��Xc�ֱ�Ϊ�����ֵ�λ�ã�T1��T2�ֱ�Ϊ�����˵��Ӷ˵�ʱ�Ӻ��ɴӶ˵����˵�ʱ�ӡ�
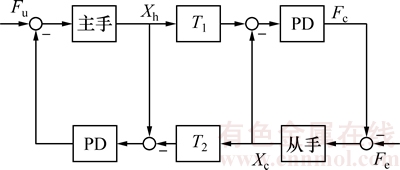
ͼ1 ��PD˫�߿���ԭ��ͼ
Fig. 1 Schematic diagram of standard PD bilateral control
ʵ���������ʱ����2 s����ʱ�����ñ�PD˫�߿��Ƶ�ң����ϵͳ��Ȼ�ܹ������ȶ���������������ȴ�������롣�ڴ˻����ϱ��������һ�ָĽ���PD˫�߷�����
�Ľ���PD������ģ��Ϊ
 (1)
(1)
ʽ�У�Kh��Kc�ֱ�Ϊ���˿������ʹӶ˿������ı���ϵ����Dh��Dc�ֱ�Ϊ���˿������ʹӶ˿���������ϵ����ʽ(1)�еĸ���λ���������£�
 (2)
(2)
ʽ�У���hh�ͦ�cc�ֱ�Ϊ��Ϣ�����˺ʹӶ�֮�䴫�������ʱ�ӣ���hc�ͦ�ch�ֱ�Ϊ��Ϣ�����˵��Ӷ˺��ɴӶ˵����˴���ĵ���ʱ�ӡ�
�������ܵ������ߵĿ��ƶ���ǰ�˶�ʱ�����ڴ�������ϵ�в���������ecc�����ֿ����������ʽ(1)������Fc���������˶�����һ���棬���ֽ������ecc���ݸ����ˣ����������˵�λ�����Ϊehh�����˿��������ݴ���������Fh�����ܴӶ˵Ŀ��������Ӷ��������ٳ��У�����˿���ϵͳ�����ԡ�
ʽ(1)�еĺ���S(t)��ȡֵ����Ϊ0��1�����������Ǿ���ʹ����һ�������������з���������㹫ʽ���£�
 (3)
(3)
����
 (4)
(4)
ʽ(3)�У�����a��b��ӳ�˿�����ʰȡ���������жȡ�aԽ���������Ծ�Խ�ã�bԽ��������������Խ���С�����c�������ǵ�������δ����ʱ��ϵͳ��Ϊ��ȫ����˫��ң����ϵͳ��
�����ֲ���λ�Ʋ���ϵͳ�д�������ʱ������A(t)�Ĵ���ʹ��S(t)��С������ʹ��ϵͳ��Դ�����Ӷ�λ�����IJ�����Ҫ��2��ԭ��һ�ǵ������˶�ʱ�����ֻ�δ������Ӧλ�ã����ǵ��Ӷ����ϰ�����ʱ�����ϰ������ֻ�ֹͣ�˶�������B(t)�����ñ���ͨ���ֺ����������2�����������C(t)����Ҫ������ͨ���۲������ڴ���ʱ���ڵ��˶����Ӷ���ʱ�����ؿ��ǽ�ȥ�����磬�ڴ�ʱ�Ӵ��ڵ�����£�������Ѹ���ƶ�ʱ������1�������������������˲����ߣ�����C(t)����ͨ��Ԥ���λ��������С���������Դ�������ϵͳ���ȶ��ԡ�
2 �������ȶ��Է���
ң����ϵͳ��������Ҫ�����ȶ��Ժ�����2�����档�ȶ����ǿ���ϵͳ�������õĻ���ǰ�ᣬ�����еĿ���ϵͳ���������������ϵͳ�ȶ����Լ�����Ϊ���������ߺʹӶ˻������ڵ���������ϵͳ��״̬����ʼ���н硣���ھĽ�PD˫�߿���ϵͳ���ȶ��Խ��з��������Ƶ�������ϵͳ�ľ����ȶ���������
2.1 �ȶ����о�
���õ��ȶ����о�����Դ���оݺ;����ȶ����оݣ������Ͽ���֤����Դ�ȶ����Ǿ����ȶ��Եij�ֲ���Ҫ����[23]����˾����ȶ����оݿ��Խ���ϵͳ�ı����ԣ�Ӧ�ø��ӹ㷺��Llewellyn�����ȶ��о������н�Ϊ������һ��[24]��
Llewellyn�����ȶ��оݣ�����һ������ʱ����Ķ��˿�����ϵͳ �����ҽ���������������ʱ����ϵͳ�Ǿ����ȶ��ģ�
�����ҽ���������������ʱ����ϵͳ�Ǿ����ȶ��ģ�
1)  ��
�� �ڸ�ƽ����Ұ�ƽ����û�м��㣻
�ڸ�ƽ����Ұ�ƽ����û�м��㣻
2) ���ڸ�ƽ��������ϵļ����Dz��ԳƵģ�����֮��Ӧ��������Ϊ��ʵ����
3)  ��
��
4)  ��
��
5)  ��
��
2.2 �ȶ��Է���
����S(t)��ȡֵ����Ϊ0��1������ֱ��S(t)ȡ��ֵͬʱ�Ŀ���ϵͳ���з�����
��S(t)=1ʱ��ң����ϵͳ�Ķ��˿�����ģ��Ϊ


 (5)
(5)
����Llewellyn�����Ƶ���ϵͳ�����ȶ���������
 (6)
(6)
 (7)
(7)
 (8)
(8)
�� ����Kc=1��Dc=0.5��T1=T2=3 s�����Եõ�y1����Ƶ�ʦصı仯�������ͼ2��ʾ��
����Kc=1��Dc=0.5��T1=T2=3 s�����Եõ�y1����Ƶ�ʦصı仯�������ͼ2��ʾ��
��ͼ2���Կ��������ڹ̶���Kc��Dc��y1���н�ģ���ˣ�ֻҪѡ���Kc��Dc���ʣ�����ʽ(7)���ǿ�������ġ�
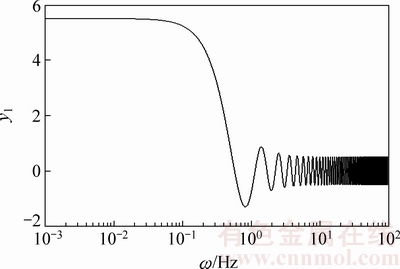
ͼ2 y1����Ƶ�ʦصı仯����
Fig. 2 Curves of y1 changing with ��
ʽ(8)���Ա�ʾΪ


 (9)
(9)
��
 (10)
(10)
��Kc=Kh=1��T1=T2=3 s��Dc=Dh=0.5��bh=1�����Եõ�y2����Ƶ�ʦصı仯�������ͼ3��ʾ��
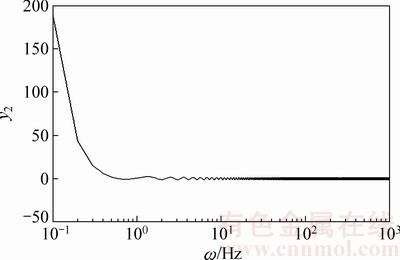
ͼ3 y2���ڦصı仯����
Fig. 3 Curves of y3 changing with ��
��Kc��Kh��Dc��Dh�̶�ʱ������y2��ȡֵ������Ƶ�ʷ�Χ�����н�ģ���ˣ�ֻҪѡ����ʵIJ���Kc��Kh��Dc��Dh���Ϳ�ʹ�ò���ʽ(9)�õ����㡣
��S(t) =0ʱ��ң����ϵͳ�Ķ��˿�����ģ��Ϊ

 (11)
(11)
ʽ�У�mh��mc�ֱ�Ϊ���ֺʹ��ֵ�������bh��bc�ֱ�Ϊ���ֺʹ��ֵ����ᡣ
����Llewellyn�����Ƶ���ϵͳ�����ȶ�������Ϊ��
 (12)
(12)
 (13)
(13)

 (14)
(14)
ͬ����ֻҪѡ����ʵIJ���Kc��Kh��Dc��Dh���Ϳ�ʹ����������ʽ(12)��(13)��(14)�������Ӷ���֤ң����ϵͳ�ľ����ȶ���
3 ���������Է���
����������ң����ϵͳ���ܵ���һ��Ҫָ�ꡣ˫������������ϵͳ�У��Ӷ˽����뻷������õ�����Ϣ���������ˣ������߱���Ը��ݴ˷��������ܵ��Ӷ˻�����״̬�������ң����ϵͳ���ٳ��С�ϵͳ����������������ϵͳ�ٳ��������ģ�����Խ�ã�ϵͳ���ٳ��о�Խ�á�ͨ�������˲����߸��ܵ����迹�ͻ����迹֮��Ĺ�ϵ����������������߸��ܵ����迹ΪZh=Fh/xh��������ʵ���迹ΪZe=Fe/xc����ˣ�������Zh��Ze֮������Ƴ̶����������ԡ����ǵ����ƶ�Խ�ߣ�ϵͳ������Խ�ã��������������Zh=Ze�����ڴ����Է���ԸĽ�PD˫�߿���ϵͳ���з���������ǰ���ȶ����������жԱȣ��Ƶ����ڱ�֤�ȶ��Ե�ǰ����ʹϵͳ���������ԵIJ���������
��S(t)=1ʱ��ϵͳ�������˶�ѧģ�ͼ�PD����ģ��Ϊ
 (15)
(15)
��ʱ�������迹Ϊ

 (16)
(16)
ͨ���ݼ���չ�����仯Ϊ������ʽ��
 (17)
(17)
 (18)
(18)
���У�MeqΪ���˲����߸��ܵ��ĵ�Ч������BeqΪ��Ч���KeqΪ��Ч�նȣ� ����
���� ����������s�ĸ߽���֣��ڵ�Ƶ�˶��¿ɺ��Բ��ƣ�A1��A2��A3��ͨ�����з��̽����
����������s�ĸ߽���֣��ڵ�Ƶ�˶��¿ɺ��Բ��ƣ�A1��A2��A3��ͨ�����з��̽����
 (19)
(19)
ϵͳ�������ʱ��Ӧ��Zh=Ze����ʽ(17)��Ӷ��迹 �Ķ�Ӧ����ȣ��ɵã�
�Ķ�Ӧ����ȣ��ɵã�
 (20)
(20)
 (21)
(21)
 (22)
(22)
Ϊ���㣬������Ϣ�����Ӷ˴��ݵĵ���ʱ����ȣ���T1=T2=T����ʧһ���ԣ������Ӷ˼�����ģ�͵ĸ�������Ϊ��mh=mc=me=0.5 kg��bh=bc=be=0.5 kg/s��ke=0.5 N/m������m��b�ֱ��ʾ���������kΪ����ϵ������ʽ(20)��(21)��(22)��ϵͳ�ȶ�����(6)��(7)��(8)��������Kc��Dc��TΪ�Ա�������MATLAB��������ά�ռ�ͼ��
��ͼ4�ɼ�����������Լ����ϵͳ�ȶ������н����ģ�˵�������ڸ��ȶ������ҵ�ʹϵͳ������ѵIJ���ȡֵ����S(t) =0ʱ��������ͬ�ķ����õ���Ѳ���ȡֵ��Լ��������

ͼ4 ϵͳ�ȶ��������ԵIJ���Լ����ϵ
Fig. 4 Parameter constraints between system stability and transparency
4 ����ʵ��
Ϊ�˸�ֱ�۵ر��ָĽ�PD˫�߿��Ʒ����Ŀ���Ч���Լ���֤ǰ���������Ƶ��������ȷ�ԣ����ڶԴ�ʱ���²��øĽ�PD˫�߿��Ʒ������Ƶ�ң����ϵͳ���з��档������ʵ�ʹ����У�ʱ�Ӳ�����һ���̶�����ij�������������ʱ�䶯̬�仯�ģ���ˣ����ڳ��˹̶�ʱ�ӵ�����⣬�����Ա�ʱ������µ�ң����ϵͳ���з��档
4.1 �̶�ʱ�ӷ�����
����simulink���߶ԸĽ�PD˫�߿���ϵͳ���з��档���У������ֵ�����������ֱ�����Ϊmh=0.5 kg��bh=0.2 kg/s��mc=0.5 kg��bc=0.2 kg/s��Ϊ�������������ģ����Ϊ��������-����-����ϵͳ��
 (23)
(23)
���У�me=0.05 kg��be=0.025 kg/s��ke=0.125 N/m��ϵͳ����ʱ����ΪT1=T2=2 s��
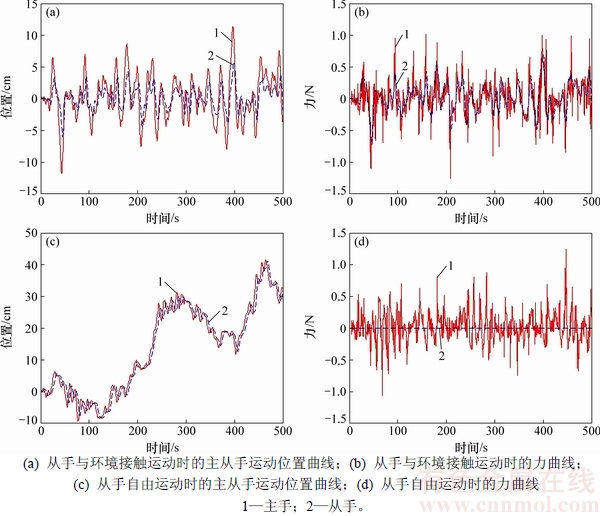
��������ͼ5��ʾ��ͼ5(a)��(b)��ʾ�ֱ�Ϊ�����뻷���Ӵ��˶�ʱ�����ֵ��˶�λ�����ߺ������ߣ�ͼ5(c)��(d)��ʾ�ֱ�Ϊ���������˶�ʱ�����ֵ��˶�λ�����ߺ������ߡ���ͼ5(a)��(c)���Կ��������۴����������˶������뻷���Ӵ��˶��������ֵ��˶�λ�����߾����н�ģ���δ������ɢ���������ң����ϵͳ���ȶ��ģ����������˶�λ�����ߵ���ϳ̶��������ϵͳ�ĸ������ܡ������ֻ����ܹ��������ֽ���λ���˶�ʱ���ɽ��������˸��ܵ��ķ�����Fh�ʹӶ��뻷��֮���������Fe������ϵͳ�����ԡ���ͼ5(b)���Կ�����Fh��Feʮ�ֽӽ������ƶȼ��ߣ�ϵͳ���ٳ��зdz��á������������˶�ʱ����ͼ5(d)���Կ������˸�����Fh�������ң���Ҳ������ϵͳ�����ԽϺá��ɼ��������������Ƴ��IJ���Լ������ѡȡ���Ʋ���ʱ���Ľ�PD˫�߿��Ʒ����Ŀ���Ч���Ƚ����롣
ͼ6��ʾΪ��PD˫�߿�����Ľ�PD˫�߿��Ʒ��������ԶԱȡ���ͼ6���Կ�����ͼ6(b)�����Ӷ��迹����϶ȸ��ã�������Ľ���PD˫�߿���ϵͳ�����Ը��ã����ڱ�PD˫�߿���ϵͳ��
4.2 ��ʱ�ӷ�����
Ϊ����֤ǰ���Ƶ����ȶ�����������������һЩ���������ϵͳ���Ʋ�����ѡȡ�Ƿ����ã�������ʵ������ϣ����̶�ʱ�Ӹ�Ϊ��1.5~2.5 s֮������仯��ʱ��ʱ�ӣ�ͼ7��ʾΪ���������
��ͼ7���Կ������ڱ�ʱ������£�ϵͳ���ȶ��������ܹ��õ���֤��������Ȼ�����½�������Ȼ�����ڽϸߵ�ˮƽ��
Ϊ��֤ϵͳ���Ʋ�����ң����ϵͳ���ܵ�Ӱ�죬���Ľ�������һ����Ʋ����������ȶ�����ʱ�ķ���ʵ�飬��������ͼ8��ʾ��
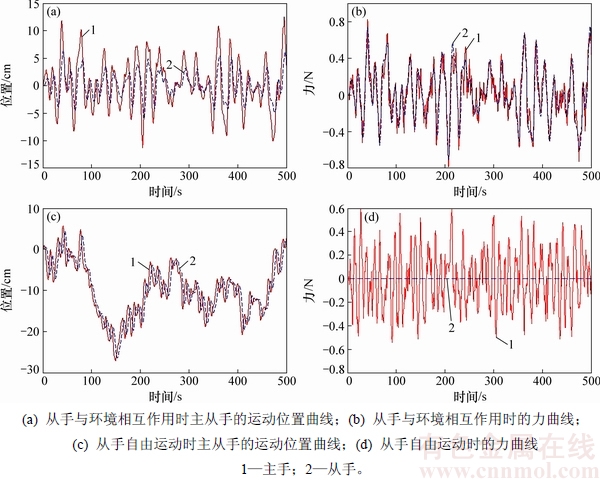
ͼ5 2 s�̶�ʱ��ʱ�ķ�����
Fig. 5 Simulation results when time delay is fixed to 2 s
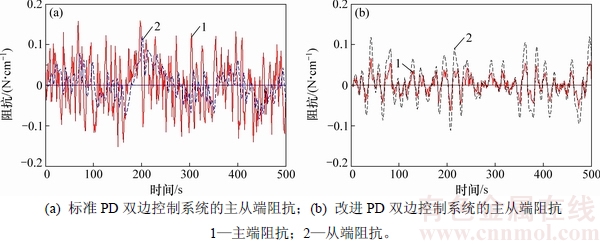
ͼ6 ��PD˫�߿�����Ľ�PD˫�߿��Ʒ��������ԶԱ�
Fig. 6 Transparency comparison between standard PD bilateral control method and improved PD bilateral control method
ͼ7 1.5~2.5 s��ʱ��ʱ�ķ�����
Fig. 7 Simulation results when time delay is fluctuating between 1.5 s and 2.5 s
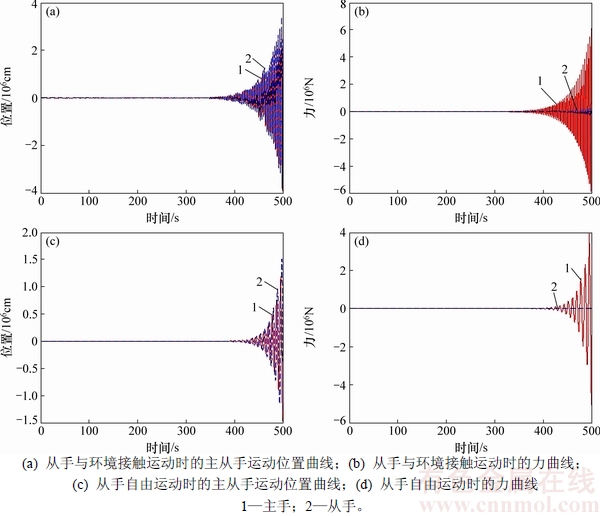
ͼ8 ���Ʋ����������ȶ�����ʱ�ķ�����
Fig. 8 Simulation results when control parameters do not meet stability conditions
��ͼ8�ɼ��������ֵ��˶�λ���������ŷ���ʱ����ƽ���������ɢ����˵����ʱϵͳ�Ǽ��䲻�ȶ��ģ��Ӷ���֤��ϵͳ�ȶ��Է����������ȷ�ԡ�
4.3 �������ܶԱȷ�����
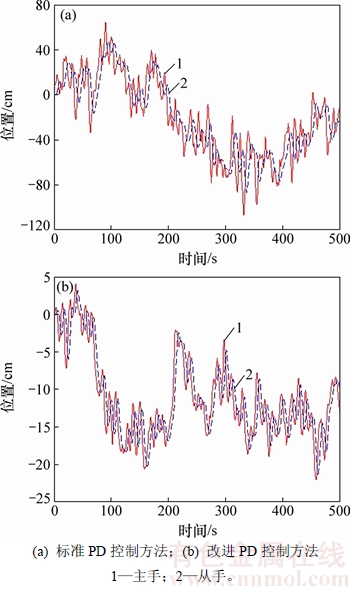
ͼ9��ͼ10��ʾ�ֱ�Ϊ��PD���Ʒ����Ľ�PD���Ʒ�������ͬ�����������ֵ��˶�����Աȡ�
˫�߿���ϵͳ�ĸ����Զ���Ϊ���ָ���T1ʱ��ǰ�����˶��ľ���(����T1��ʾ�����˵��Ӷ˵�ʱ��)���ڷ��������������Ϊ����λ�ø�������λ�õ������ԽС����ϵͳ�ĸ�������Խ�á�
��ͼ9��ͼ10���Կ��������۴��ִ��������˶������뻷���Ӵ��˶����Ľ�PD���Ʒ����´��ָ��������˶����������ȱ�PD���Ʒ���ʱ�ĺã�˵���Ľ�PD���Ʒ�����ϵͳ������������ڱ�PD���Ƶõ���ߡ�

ͼ9 �����뻷���Ӵ��˶�ʱ���������˶�λ������
Fig. 9 Movement curves of mater hand and slave hand when slave hand contacting with environment
ͼ10 ���������˶�ʱ���������˶�λ������
Fig. 10 Movement curves of master hand and slave hand when slave hand moving freely
5 ����
1) ����Llewellyn�����ȶ��о��Ƶ���ϵͳ�����ȶ����������ڴ˻����ϸ���ϵͳ���Զ����Ƶ������ڱ�֤�ȶ���ǰ���£�ϵͳ����������Ӧ�����������
2) ����ʵ����֤���Ƶ��IJ���Լ�����̵���ȷ�ԡ��Ľ���PD˫�߿��Ʒ������ڹ̶�ʱ�Ӻ�ʱ��ʱ�Ӿ����кܺõ���Ӧ�ԣ��ܹ��ڱ�֤ң����ϵͳ�ȶ���ͬʱʹ��ϵͳ������������ߡ�
3) �Ľ���PD˫�߿��Ʒ�������ڱ�PD���Ʒ����ܹ�ʹң����ϵͳ�ĸ������ܽ�һ����ߡ�
�ο����ף�
[1] MERSHA A Y, STRAMIGIOLI S, CARLONI R. On bilateral teleoperation of aerial robots[J]. IEEE Transactions on Robotics, 2014, 30(1): 258-274.
[2] REBELO J, SEDNAOUI T, DEN EXTER E B, et al. Bilateral robot teleoperation: A wearable arm exoskeleton featuring an intuitive user interface[J]. IEEE Robotics & Automation Magazine, 2014, 4(21): 62-69.
[3] BRUNNER B, HIRZINGER G, LANDZETTEL K, et al. Multisensory shared autonomy and tele-sensor- programming-key issues in the space robot technology experiment ROTEX[C]//Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 1993: 2123-2139.
[4] HIRZINGER G, BRUNNER B, DIETRICH J, et al. Sensor-based space robotics-ROTEX and its telerobotic features[J]. IEEE Transaction on Robotics and Automation, 1993, 9(5): 649-663.
[5] IMAIDA T, YOKOKOHJI Y, DOI T, et al. Ground-space bilateral teleoperation of ETS-VII robot arm by direct bilateral coupling under 7s time delay condition[J]. IEEE Transactions on Robotics and Automation, 2004, 20(3): 499-511.
[6] ������. ����쳵������������[J]. ���ǵ����������ý��, 2007, 21(4): 40-42.
LIU Jinjun. Orbital express-the savior of satellites[J]. Satellite TV & IP Multimedia, 2007, 21(4): 40-42.
[7] VOZAR S, LEONARD S, KAZANZIDES P, et al. Experimental evaluation of force control for virtual-fixture-assisted teleoperation for on-orbit manipulation of satellite thermal blanket insulation[C]//2015 IEEE International Conference on Robotics and Automation(ICRA). Seattle: IEEE, 2015: 4424-4431.
[8] WILDE M, CHUA Z K, FLEISCHNER A. Effects of multivantage point systems on the teleoperation of spacecraft docking[J]. IEEE Transactions on Human-Machine Systems, 2014, 44(2): 200-210.
[9] MUKHERJEE J K. Fast visualization technique for view constrained teleoperation in nuclear industry[C]//2014 International Conference on Information Science and Applications(ICISA). Seoal: IEEE, 2014: 1-4.
[10] NISKY I, HSIEH M H, OKAMURA A M. Uncontrolled manifold analysis of arm joint angle variability during robotic teleoperation and freehand movement of surgeons and novices[J]. IEEE Transactions on Biomedical Engineering, 2014, 61(12): 2869-2881.
[11] PACCHIEROTTI C, ABAYAZID M, MISRA S, et al. Teleoperation of steerable flexible needles by combining kinesthetic and vibratory feedback[J]. IEEE Transactions on Haptics, 2014, 7(4): 551-556.
[12] AI-MOUHAMED M, NAZEERUDDIN M, MERAH N. Design and instrumentation of force feedback in telerobotics[J]. IEEE Transactions on Instrumentation and Measurement, 2009, 58(6): 1949-1957.
[13] BACOCCO R, MELCHIORRI C. LQ control design of cooperative teleoperation system[C]//Proceedings 2009 14th International Conference on Advanced Robotics. Tokyo: IEEE, 2009: 490-495.
[14] ������. ʱ��������ң����ϵͳ�ĸ������ܼ��ȶ����о�[D]. ����: �ϲ���ѧ���繤��ѧԺ, 2011: 4-9.
HU Lingyan. Trajectory tracking and stability of teleoperator with time delay and force feedback[D]. Jiangxi: Nanchang University. School of Mechanical and Electrical Engineering, 2011: 4-9.
[15] �¿���. �ռ������ң�����˷�ʱ��Ӱ����о���չ[J]. ��ؼ���, 2007, 26(2): 1-5.
CHEN Junjie. Research headway of overcoming time-delay infection for teleoperation of space robot[J]. Measurement and Control Technology, 2007, 26(2): 1-5.
[16] NIEMEYER G, SLOTINE J E. Telemanipulation with time delays[J]. The International Journal of Robotics Research, 2004, 23(9): 873-890.
[17] ������, ����, �ﺺ��, ��. ���������ң������Ԥ��ͼ�η��漼��[J]. �������켼��, 2011(7): 60-63.
JIA Qingxuan, GAO Xin, SUN Hanxu, et al. Predictive graphical simulation technology for robot teleoperation[J]. Aeronautical Manufacturing Technology, 2011(7): 60-63.
[18] ��ѧǫ, ����, ���, ��. ���ɷ��пռ������ң������ά����ϵͳ�о�[J]. �ѧ��, 2009, 30(1): 402-408.
WANG Xueqian, LIANG Bin, LI Cheng, et al. Study on three dimensional predictive simulation system of teleoperation for free flying space robot[J]. Journal of Astronautics, 2009, 30(1): 402-408.
[19] ������, Τ��, ������. ��ʱ��������˫�߿���ϵͳ[J]. ������, 2005, 27(5): 410-413.
DENG Qiwen, WEI Qing, LI Zexiang. Force-reflection bilateral control system with large time delay[J]. Robot, 2005, 27(5): 410-413.
[20] ����, ����, ��ѧǫ, ��. �ռ������ң�����ؼ�����������չ��[J]. �ռ���Ƽ�����Ӧ��, 2014, 40(6): 1-9.
ZHANG Tao, CHEN Zhang, WANG Xueqian, et al. Overview and prospect of key technologies of teleoperation of space robot[J]. Aerospace Control and Application, 2014, 40(6): 1-9.
[21] ������, Τ��, ������. ������ʱ��ң����ϵͳ��ʱ������ȶ��Է���[J]. ����������Ӧ��, 2007, 24(5): 815-818.
DENG Qiwen, WEI Qing, LI Zexiang. Analysis of delay-dependent stability for time-delay teleoperating systems with force-reflection[J]. Control Theory and Applications, 2007, 24(5): 815-818.
[22] DENG Qiwen, WEI Qing, LI Zexiang. Improving the transparency of teleoperating system[C]//Proceedings of the 25th Chinese Control Conference. Harbin: IEEE Press, 2006: 861-866.
[23] ���. ���ھ����ȶ��ԵĿռ������ң�����㷨�о�[D]. ����: ������ѧ������ѧ���ƿ�ѧ�빤��ѧԺ, 2007: 21-22.
LI Kuan. Research on control algorithms of space robot teleoperation based on the absolute stability[D]. Hunan: National University of Defense Technology. School of Control Science and Control Engineering, 2007: 21-22.
[24] ����, �ΰ���. ����������ʵ�������ٳ���ϵͳ�����ȶ��Է���[J]. �����DZ�ѧ��, 2006, 27(z2): 1090-1093.
LIU Wei, SONG Aiguo. Force-reflecting teleoperation system based on virtual reality and its stability analyse[J]. Chinese Journal of Scientific Instrument, 2006, 27(z2): 1090-1093.
(�༭ ����ƽ)
�ո����ڣ�2017-05-15�������ڣ�2017-07-16
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(71701008)(Project(71701008) supported by the National Natural Science Foundation of China)
ͨ�����ߣ��ھ��ɣ���ʿ�������ڣ����������������Զ�����ϵͳ��������ϼ�����Ԥ���뽡�����������о���E-mail��yujs@buaa.edu.cn
ժҪ����Կռ������ң���������е�ͨѶʱ�����⣬���һ�ָĽ���PD˫��������ң��������ϵͳ�����ȴ��������Ƶ��ÿ���ϵͳ�����ȶ����������ڱ�֤ϵͳ�ȶ���ǰ���£���һ���о����ϵͳ���Եķ������������Ʋ�����Լ��������ͨ�����PD˫�߿��Ʒ����ĶԱ�ʵ���Լ��̶�ʱ�����ʱ��2�ֲ�ͬ�����µķ���ʵ�飬��֤�øĽ����������������ң����ϵͳ���Ժ������ܵ����á��о�������������Ƶ����ȶ������������Է������۽�һ�������˸�PD˫�߿��Ʒ������ɶԸ���ң����ϵͳ��Ӧ�ø÷����ṩ�ο���
[6] ������. ����쳵������������[J]. ���ǵ����������ý��, 2007, 21(4): 40-42.
[14] ������. ʱ��������ң����ϵͳ�ĸ������ܼ��ȶ����о�[D]. ����: �ϲ���ѧ���繤��ѧԺ, 2011: 4-9.
[15] �¿���. �ռ������ң�����˷�ʱ��Ӱ����о���չ[J]. ��ؼ���, 2007, 26(2): 1-5.
[17] ������, ����, �ﺺ��, ��. ���������ң������Ԥ��ͼ�η��漼��[J]. �������켼��, 2011(7): 60-63.
[18] ��ѧǫ, ����, ���, ��. ���ɷ��пռ������ң������ά����ϵͳ�о�[J]. �ѧ��, 2009, 30(1): 402-408.
[19] ������, Τ��, ������. ��ʱ��������˫�߿���ϵͳ[J]. ������, 2005, 27(5): 410-413.
[20] ����, ����, ��ѧǫ, ��. �ռ������ң�����ؼ�����������չ��[J]. �ռ���Ƽ�����Ӧ��, 2014, 40(6): 1-9.
[21] ������, Τ��, ������. ������ʱ��ң����ϵͳ��ʱ������ȶ��Է���[J]. ����������Ӧ��, 2007, 24(5): 815-818.
[23] ���. ���ھ����ȶ��ԵĿռ������ң�����㷨�о�[D]. ����: ������ѧ������ѧ���ƿ�ѧ�빤��ѧԺ, 2007: 21-22.
[24] ����, �ΰ���. ����������ʵ�������ٳ���ϵͳ�����ȶ��Է���[J]. �����DZ�ѧ��, 2006, 27(z2): 1090-1093.
