DOI: 10.11817/j.issn.1672-7207.2016.09.014
考虑柔性齿圈的节点外啮合行星齿轮均载特性分析
鲍和云,周兴军,朱如鹏,陆凤霞
(南京航空航天大学 机电学院,江苏 南京,210016)
摘要:建立一种考虑摩擦力、时变啮合刚度及阻尼、综合啮合误差及内齿圈柔性的节点外啮合行星齿轮平移-扭转动力学模型。推导系统多自由度的动力学微分方程组并采用四阶-五阶Runge-Kutta法求解方程,得到系统的振动响应。分析柔性齿圈、摩擦力以及节点外系数对系统均载特性的影响。研究结果表明:表面摩擦力是系统内部激励源,会加剧系统振动,而对于节点外啮合行星齿轮,在啮合过程中摩擦力不换向,改善系统的振动。行星齿轮系统采用具有一定柔性的齿圈会提高系统内啮合载荷分配的均匀性,对于节点外啮合行星齿轮而言,均载系数随着节点外系数的变化呈现“U”型变化趋势。
关键词:柔性齿圈;节点外啮合;行星齿轮;摩擦力;均载
中图分类号:TH132.413 文献标志码:A 文章编号:1672-7207(2016)09-3005-06
Load sharing analysis of planetary gear train with meshing beyond pitch point considering flexible deformable ring
BAO Heyun, ZHOU Xingjun, ZHU Rupeng, LU Fengxia
(College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics,
Nanjing 210016, China)
Abstract: A planetary gear translational-rotational dynamics model with meshing beyond pitch point in consideration of sliding friction, time-varying mesh stiffness and damp, integrated mesh errors and flexible ring was established. The motion differential equations with multiple degrees of freedom were derived and the equations were solved by using the ode45 Runge-Kutta method. The response of the system in time domain was obtained. The impacts of flexible ring gear, coefficients of friction and coefficients of beyond pitch point on dynamics load sharing characteristic were analyzed. The results show that friction is the internal excitation source and it will increase the vibration of the system. For planetary gear train with meshing beyond pitch point, friction will reduce the vibration because it will not change direction during meshing. The planetary gear system improves the load sharing by using flexible deformable ring with meshing beyond pitch point, and the trend of the coefficient of load sharing present “U” type.
Key words: flexible deformable ring; meshing beyond pitch point; planetary gear; friction; load sharing
节点外啮合指齿轮啮合时节点位于实际啮合线一侧的状态。按节点与实际啮合线位置关系可分为节点前与节点后啮合2种。目前,节点外啮合齿轮已用于航空齿轮传动等系统中。当前已有一些学者分别对节点外啮合以及行星齿轮动力学进行了研究。在节点外啮合研究方面,高明等[1]定义了节点外系数,通过优化算例提出了节点外啮合理论的应用可行性;李鹏等[2]给出了少齿数渐开线圆柱齿轮副节点外啮合的判定公式及具体的计算方法;孙永正等[3]根据节点外啮合齿轮传动的啮合特点,提出了一种更为合理且精度较高的平均摩擦因数计算方法。在考虑柔性齿圈的行星齿轮动力学方面,张俊等[4]采用有限段单元的离散化建模方法,将连续体的柔性齿圈离散成由等效虚拟弹簧连接的刚性齿圈段;方宗德等[5]在考虑内齿圈柔性影响的时候,将齿圈质量集中在齿圈和齿式联轴器上,中间加以虚拟扭转弹簧连接;WU等[6-7]研究了考虑齿圈弹性,行星轮沿齿圈均匀分布和非均匀分布时的行星轮系模态特性。在此,本文作者研究了节点外啮合齿轮副的动力学及均载特性,并考虑摩擦力和柔性齿圈等对节点外啮合齿轮副均载特性的影响,为节点外啮合齿轮副的设计与应用提供一定的理论基础。
1 系统计算模型
内齿轮因体积较大,采用薄辐结构,有较大的扭转柔度,因此将其质量集中在齿圈和齿式联轴器上,中间加以虚拟扭转弹簧kr0连接,图1所示为节点外啮合行星齿轮减速器的传动简图[5]。
采用集中质量法建立模型,并建立以下的假设:
1) 各行星轮具有相同的物理和几何参数;
2) 各齿轮均为渐开线直齿圆柱齿轮,支承简化为弹簧,除内齿圈外各构件均看作刚体;
3) 系统各构件的运动保持在同一平面内;
4) 忽略齿侧间隙引起的非线性影响。
建立2K-H型行星齿轮传动系统动力学模型如图2所示。
平移-扭转耦合模型考虑了齿轮的平移振动和扭转振动,显著地增加了系统的自由度,因此为了方程建立和求解的方便,建立OXY为静坐标系,原点在行星架的回转中心,Onxnyn为动坐标系,原点在各行星轮理论中心On,坐标轴分别与OXY坐标轴平行。
该模型共有3N+9个自由度,分别为太阳轮、行星轮和内齿圈的横向平移位移x、纵向平移位移y以及各构件的扭转位移u。
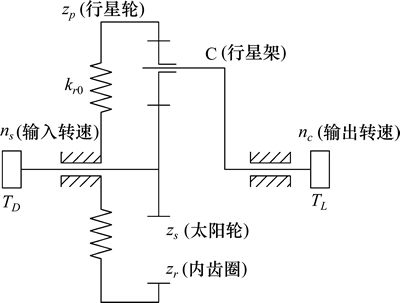
图1 节点外啮合行星齿轮减速器传动简图
Fig. 1 Gear train of planetary gear with meshing beyond pitch point
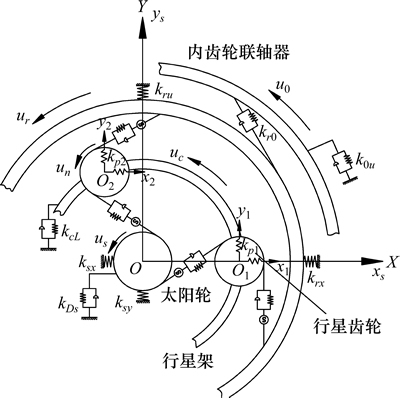
图2 节点外啮合行星齿轮平移-扭转耦合模型
Fig. 2 Translational-rotational coupling dynamic model of planetary gear with meshing beyond pitch point
2 动态啮合力及摩擦力的计算
在齿轮副连续运转过程中,随着啮合齿对数变化,齿轮副啮合刚度会发生周期性的变化,假定单对齿啮合刚度在啮合过程中不变,可将啮合刚度简化成矩形波形式变化[8],如图3所示。
对于一般齿轮副而言,其重合度介于1和2之间,因此考虑动态啮合力时分2对啮合轮齿来研究,可得齿轮副各对齿啮合力为
 (1)
(1)
式中:sn和rn分别表示外啮合对和内啮合对; 和
和 分别为外啮合线和内啮合线上相对位移;k为啮合刚度;c为啮合阻尼,下标1和2分别表示第1对齿和第2对齿。
分别为外啮合线和内啮合线上相对位移;k为啮合刚度;c为啮合阻尼,下标1和2分别表示第1对齿和第2对齿。
根据行星齿轮传动系统中外、内啮合副啮合线方向的相对位置关系,并考虑齿轮副啮合误差,可得各齿轮副之间的相对位移如下[4]:
1) 太阳轮s和第n个行星轮相对位移沿啮合线方向投影为

 (2)
(2)
2) 内齿轮r和第n个行星轮相对位移沿啮合线方向投影为

 (3)
(3)
3) 行星架相对于第n个行星轮沿行星架方向投影为
 (4)
(4)
式中:φn为第n个行星轮的理论中心到行星架理论中心的连线OOn与坐标轴x正方向的夹角;αsp和αrp分别为外、内啮合角;φsn=φn-αsp,φrn=φn+αrp;esn(t)和ern(t)分别为外、内啮合线上的误差激励,考虑偏心误差以及基节和齿形误差的影响,并假设综合啮合误差按正弦函数变化,可得ej(t)=Ejsin(ωmt+φj)[9],ωm为啮合频率,Ej为齿轮副j的综合啮合误差幅值,φj为啮合初相位。
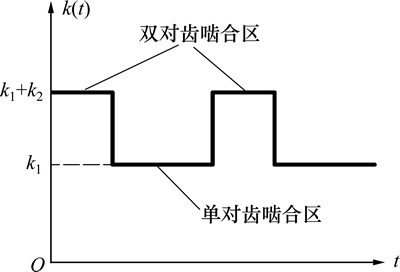
图3 矩形波近似直齿轮时变啮合刚度
Fig. 3 Time varying mesh stiffness of simulating with spur gear rectangular
对于节点外啮合齿轮副来说,实际啮合线段位于节点一侧,齿面摩擦力在啮合过程中不换向,为探究其对动态响应的影响,故在研究行星轮系动力学特性的时候,需考虑摩擦力的影响。
根据库仑定律,齿面摩擦力f=λμF[10],其中:λ为摩擦力的方向系数,其值为±1或0;μ为摩擦因数;F为啮合力。
摩擦力方向系数是用来判断摩擦力在啮合过程中方向是否改变的系数,一般而言,若啮合经过节点,则摩擦力方向发生改变,具体来说,λ有如下判断公式[11]:
 (5)
(5)
式中:lpi(t)和lgi(t)分别代表啮合齿轮副的主、从动轮第i对摩擦力臂,由于本文研究的齿轮副重合度均在1和2之间,所以i一般取值为1或2;Ωgp为从、主动轮在行星轮系中相对速度Ωgc与Ωpc的比值,关系式如下:Ωgp=|Ωgc/Ωpc|。
在齿轮副啮合过程中,摩擦因数随着参与啮合部分的不同而变化,但变化幅值不大,故在本文中将摩擦因数作为定值,取平均摩擦因数μm=0.05[11]来计算。
3 系统运动微分方程
依据牛顿第二定律建立各构件运动方程。令mh为各构件的质量,Mh为其等效质量,其中Mh=Ih/r2bh(Ih为各构件的转动惯量;rbh为基圆半径),khx和khy为各构件的平移支撑刚度,khu为扭转刚度,chx和chy为平移支撑阻尼,chu为扭转阻尼,Th为施加在构件上外载荷,λ为摩擦力方向系数,f为摩擦力,l为摩擦力臂,则系统运动微分方程为
 (6)
(6)
系统坐标中包含了刚体位移,方程有不定解,因此需要消除刚体位移[12]。引入相邻质量块之间的相对位移,定义相对位移坐标如下:
 (7)
(7)
其中:
 ;
;
;
 ;
;
 。
。
将式(7)代入式(3),得内啮合相对位移坐标


 (8)
(8)
利用数值法求解上述动力学微分方程时,方程各系数数量级差异较大,导致结果无法收敛,得不到理想计算结果,故需对方程进行量纲一化。为此,引进位移标尺bc(取bc=1×10-5 m)和时间标尺ωc( ,
, 为太阳轮和行星轮啮合刚度的平均值),使得位移(量纲一的量)
为太阳轮和行星轮啮合刚度的平均值),使得位移(量纲一的量) ,时间(量纲一的量)
,时间(量纲一的量) [13]。
[13]。
4 求解结果及分析
内啮合副为节点后啮合判定条件为 >
> [14],其中:为大齿轮齿顶圆压力角,为啮合角。对于等模数齿轮副,仅通过改变变位系数来实现节点外啮合存在一定的限制,因此本文采用非等模数设计,只要适当选取2个齿轮压力角和变位系数便可较为容易地实现节点外啮合,其无侧隙啮合条件为
[14],其中:为大齿轮齿顶圆压力角,为啮合角。对于等模数齿轮副,仅通过改变变位系数来实现节点外啮合存在一定的限制,因此本文采用非等模数设计,只要适当选取2个齿轮压力角和变位系数便可较为容易地实现节点外啮合,其无侧隙啮合条件为
 (9)
(9)
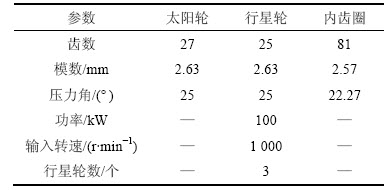
通过优化,可得某2K-H型节点外啮合行星齿轮减速器的参数如表1所示。
将式(6)中阻尼及啮合误差均取为0,得到系统的静变形方程
 (10)
(10)
由此可求得系统静变形为
 (11)
(11)
表1 节点外啮合行星齿轮传动系统参数
Table 1 Basic design parameters of gear system
采用四阶-五阶Runge-Kutta算法,初值选择为系统静变形,对上述方程进行求解。为消除系统的瞬态响应,从系统进入稳态时开始取值。
图4和图5所示分别为有摩擦和无摩擦时太阳轮与第1个行星轮、内齿圈与第1个行星轮在啮合线上的相对位移在时域内的响应。从图4和图5可知:由于内啮合采用了柔性齿圈,扭转刚度相对较小,因此相比外啮合相对位移δsn1,内啮合相对位移δrn1幅值更大。另一方面,当摩擦因数从0变为0.05时,外啮合响应幅值变大,表明摩擦力是系统内部激励源,会加剧系统振动;而内啮合响应幅值减小,这是由于内啮合采用了节点外啮合,摩擦力在啮合过程中不换向,改善了系统的振动。
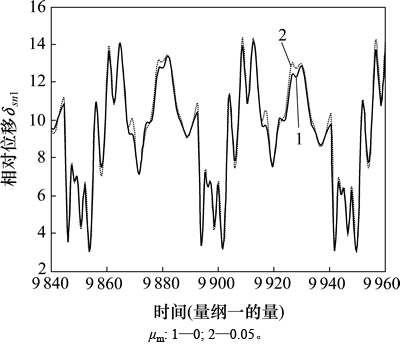
图4 太阳轮与第1个行星轮相对位移
Fig. 4 Compression of the 1st sun-planet
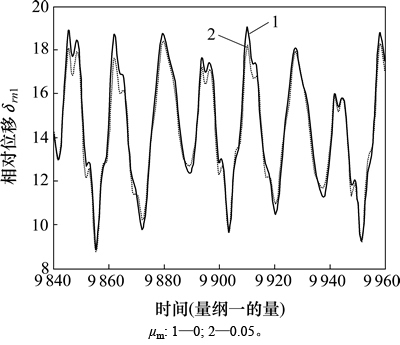
图5 内齿圈与第1个行星轮相对位移
Fig. 5 Compression of the 1st ring-planet
行星齿轮传动系统载荷分配的均匀性用均载系数表示,均载系数越大,则传动载荷分配越不均匀。为了消除瞬时动载的影响,首先计算每一齿频周期内的均载系数[15]。
 (12)
(12)
 (13)
(13)
式中:n为行星轮数;k为1个周期内的啮频周期数;Pspij和Prpij分别为对应的外、内啮合动载荷。
再定义一个系统周期内均载系数为:
 (14)
(14)
 (15)
(15)
针对上述参数的行星传动系统,通过改变内齿圈联轴器的扭转刚度kr0,改变内齿圈的柔性,得到不同的均载系数,从而可得内、外啮合均载系数随kr0变化趋势如图6所示。
从图6可知:对于外啮合而言,由于改变的是内齿圈联轴器的扭转刚度,所以对其均载系数影响不大,而对内啮合而言,随着内齿圈联轴器扭转刚度kr0的增大,内啮合均载系数brp也不断增大,载荷分配越不均匀,但当kr0达到1.0×106时,其均载系数变化趋势渐趋稳定。因此,对于行星齿轮传动系统而言,采用具有一定柔性的齿圈可提高其内啮合载荷分配的均匀性。
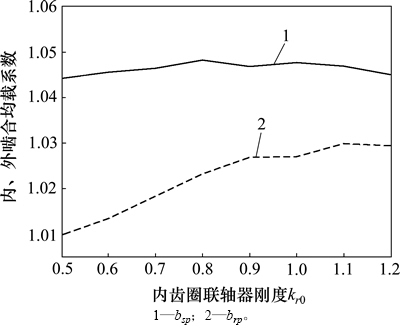
图6 内齿圈联轴器扭转刚度单独变化时均载系数
Fig. 6 Load sharing coefficients with stiffness of shaft coupling changes
分别计算μm=0和μm=0.05时内、外啮合副的均载系数,结果如表2所示。
表2 节点外啮合行星齿轮传动系统均载参数
Table 2 Load sharing coefficients of planetary gear

由表2可得:当摩擦因数从0变为0.05时,由于外啮合齿轮副摩擦力经过节点时换向,引起激励,所以其均载系数增大;而内啮合为节点外啮合,齿面摩擦力没有换向过程,其均载系数反而有所减小。
节点外系数表示节点外啮合齿轮副节点远离实际啮合线的程度,变化范围为0~1,节点外系数越大,节点外啮合程度越大,即实际啮合线离节点的距离越远;反之表示节点外啮合程度越小,即实际啮合线离节点的距离越近。对于本文研究的内啮合副为节点后啮合而言,其计算表达式为[3]
 (16)
(16)
式中:ra3为内齿圈齿顶圆半径; 为内齿圈节圆半径;m3为内齿圈模数。
为内齿圈节圆半径;m3为内齿圈模数。
改变内啮合副的节点外系数,得到内啮合均载系数随节点外系数的变化趋势如图7所示。
由图7可得:随着节点外系数的增大,内啮合均载系数先逐渐减小,当节点外系数达到0.2附近时,内啮合均载系数达到最小值,再随着节点外系数的增大,内啮合均载系数又逐渐增大。
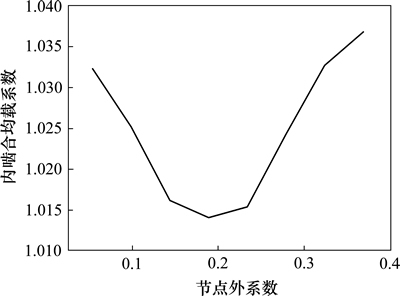
图7 内啮合均载系数随节点外系数的变化趋势
Fig. 7 Load sharing coefficients with coefficients of beyond pitch point changes
5 结论
1) 建立了一种考虑摩擦力、时变啮合刚度及阻尼、综合啮合误差及内齿圈柔性的节点外啮合行星齿轮平移-扭转动力学模型,运用变步长积分法求解了动力学非线性方程组,得到了系统的振动响应。
2) 摩擦力会作为内部激励源加剧系统的振动,但节点外啮合齿轮副在考虑摩擦力时,由于摩擦力不换向,系统振动幅值会降低,且均载性能得到改善。
3) 采用具有一定柔性的齿圈会提高系统内啮合载荷分配的均匀性。
4) 随着节点外系数在0~1之间改变,内啮合均载系数呈现“U”型变化趋势,当节点外系数取0.2附近时,内啮合均载效果最好。
参考文献:
[1] 高明, 周英. 节点外啮合理论应用在直齿圆柱齿轮变位系数优化中的研究[J]. 机械, 1997, 24(2): 2-4.
GAO Ming, ZHOU Ying. Study of addendum modification coefficient optimization of spur gear engaging beyond pitch point[J]. Machinery, 1997, 24(2): 2-4.
[2] 李鹏, 王保民,张国海. 少齿数渐开线圆柱齿轮副节点外啮合的研究[J]. 机械工程师, 2010(10): 15-17.
LI Peng, WANG Baomin, ZHANG Guohai. Study on the meshing beyond pitch point of involute gear pair with few teeth number[J]. Mechanical Engineer, 2010(10): 15-17.
[3] 孙永正, 朱如鹏, 鲍和云. 节点外啮合齿轮胶合承载能力中平均摩擦因数的计算方法[J]. 航空动力学报, 2013, 28(9): 2155-2160.
SUN Yongzheng, ZHU Rupeng, BAO Heyun. Calculation of mean friction coefficient in scuffing strength for gear drive with meshing beyond pitch point[J]. Journal of Aerospace Power, 2013, 28(9): 2155-2160.
[4] 张俊, 宋轶民, 王建军. 计入齿圈柔性的直齿行星传动动力学建模[J]. 机械工程学报, 2009, 45(12): 29-36.
ZHANG Jun, SONG Yimin, WANG Jianjun. Dynamic modeling for spur planetary gear transmission with flexible ring gear[J]. Journal of Mechanical Engineering, 2009, 45(12): 29-36.
[5] 方宗德, 沈允文. 三路功率分流恒星式减速器的动态特性[J]. 航空学报, 1990, 11(7): A341-A350.
FANG Zongde, SHEN Yunwen. The dynamics behavior of star gearing with three branches[J]. Acta Aeronautica et Astronautica Sinica, 1990, 11(7): A341-A350.
[6] WU X, PARKER R G. Modal properties of planetary gears with an elastic continuum ring gear[J]. Journal of Applied Mechanics, 2008, 75(3): 031014-1-12.
[7] PARKER R G, WU X. Vibration modes of planetary gears with unequally spaced planets and an elastic ring gear[J]. Journal of Sound and Vibration, 2010, 329: 2265-2275.
[8] PARKER R G, LIN Jian. Mesh stiffness variation instabilities in two-stage gear systems[J]. Journal of Vibration and Acoustics, 2002, 124: 68-76.
[9] 尚珍, 刘忠明, 王长明. 双浮动行星齿轮传动非线性动力学均载及浮动量分析[J]. 机械科学与技术, 2011, 30(4): 683-688.
SHANG Zhen, LIU Zhongming, WANG Changming. Analysis of load sharing and floating displacement in a double-floating planetary gearing transmission[J]. Mechanical Science and Technology for Aerospace Engineering, 2011, 30(4): 683-688.
[10] VAISHYA M, SINGH R. Strategies for modeling friction in gear dynamics[J]. ASME Journal of Mechanical Design, 2003, 125(6): 383-393.
[11] 朱恩涌, 巫世晶,王晓笋. 含摩擦力的行星齿轮传动系统非线性动力学模型[J]. 振动与冲击, 2010, 29(8): 217-254.
ZHU Enyong, WU Shijing, WANG Xiaosun. Nonlinear dynamics model of planetary gear with friction[J]. Journal of Vibration and Shock, 2010, 29(8): 217-254.
[12] 孙涛, 沈允文,孙智民. 行星齿轮传动非线性动力学模型与方程[J]. 机械工程学报, 2002, 38(3): 6-10.
SUN Tao, SHEN Yunwen, SUN Zhimin. Study on nonlinear dynamic behavior of planetary gear train dynamic model and govering equations[J]. Journal of Mechanical Engineering, 2002, 38(3): 6-10.
[13] 杜进辅, 方宗德. 基于变形协调的行星轮系均载特性研究[J]. 航空动力学报, 2012, 27(5): 1166-1171.
DU Jinfu, FANG Zongde. Study on load sharing behavior of planetary gear train based on deformation compatibility[J]. Journal of Aerospace Power, 2012, 27(5): 1166-1171.
[14] 孙永正. 节点外啮合行星齿轮传动系统设计方法动力学分析[D]. 南京: 南京航空航天大学机电学院, 2013: 12-45.
SUN Yongzheng. Design methods and dynamic analysis of planetary gear transmission drive with meshing beyond pitch point[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. College of Mechanical and Electrical Engineering, 2013: 12-45.
[15] 朱增宝, 朱如鹏,李应生. 安装误差对封闭差动人字齿轮传动系统动态均载特性的影响[J]. 机械工程学报, 2012, 48(3): 16-24.
ZHU Zengbao, ZHU Rupeng, LI Yingsheng. Impact of installation error on dynamics load sharing characteristic for encased differential herringbone train[J]. Journal of Mechanical Engineering, 2012, 48(3): 16-24.
(编辑 赵俊)
收稿日期:2015-06-04;修回日期:2015-09-14
基金项目(Foundation item):国家自然科学基金资助项目(51305196);中央高校基本科研业务费专项资金资助项目(NZ2014201) (Project(51305196) supported by the National Natural Science Foundation of China; Project(NZ2014201) supported by the Fundamental Research Foundation for the Central Universities)
通信作者:鲍和云,博士,副教授,从事机械CAD及自动化研究;E-mail: siyanger@163.com

