Bifurcation and chaos study on transverse-torsional coupled 2k-h planetary gear train with multiple clearances
来源期刊:中南大学学报(英文版)2016年第1期
论文作者:朱如鹏 盛冬平 靳广虎 陆凤霞 鲍和云
文章页码:86 - 101
Key words:planetary gear train; bifurcation; chaos; transverse-torsional coupling; backlash; bearing clearance
Abstract: a new non-linear transverse-torsional coupled model was proposed for 2K-H planetary gear train, and gear’s geometric eccentricity error, comprehensive transmission error, time-varying meshing stiffness, sun-planet and planet-ring gear pair’s backlashes and sun gear’s bearing clearance were taken into consideration. The solution of differential governing equation of motion was solved by applying variable step-size Runge-Kutta numerical integration method. The system motion state was investigated systematically and qualitatively, and exhibited diverse characteristics of bifurcation and chaos as well as non-linear behavior under different bifurcation parameters including meshing frequency, sun-planet backlash, planet-ring backlash and sun gear’s bearing clearance. Analysis results show that the increasing damping could suppress the region of chaotic motion and improve the system’s stability significantly. the route of crisis to chaotic motion was observed under the bifurcation parameter of meshing frequency. However, the routes of period doubling and crisis to chaos were identified under the bifurcation parameter of sun-planet backlash; besides, several different types of routes to chaos were observed and coexisted under the bifurcation parameter of planet-ring backlash including period doubling, Hopf bifurcation, 3T-periodic channel and crisis. Additionally, planet-ring backlash generated a strong coupling effect to system’s non-linear behavior while the sun gear’s bearing clearance produced weak coupling effect. Finally, quasi-periodic motion could be found under all above–mentioned bifurcation parameters and closely associated with the 3T-periodic motion.
J. Cent. South Univ. (2016) 23: 86-101
DOI: 10.1007/s11771-016-3052-x

SHENG Dong-ping(盛冬平), ZHU Ru-peng(朱如鹏), JIN Guang-hu(靳广虎),
LU Feng-xia(陆凤霞), BAO He-yun(鲍和云)
College of Mechanical and Electrical Engineering,
Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
 Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Abstract: a new non-linear transverse-torsional coupled model was proposed for 2K-H planetary gear train, and gear’s geometric eccentricity error, comprehensive transmission error, time-varying meshing stiffness, sun-planet and planet-ring gear pair’s backlashes and sun gear’s bearing clearance were taken into consideration. The solution of differential governing equation of motion was solved by applying variable step-size Runge-Kutta numerical integration method. The system motion state was investigated systematically and qualitatively, and exhibited diverse characteristics of bifurcation and chaos as well as non-linear behavior under different bifurcation parameters including meshing frequency, sun-planet backlash, planet-ring backlash and sun gear’s bearing clearance. Analysis results show that the increasing damping could suppress the region of chaotic motion and improve the system’s stability significantly. the route of crisis to chaotic motion was observed under the bifurcation parameter of meshing frequency. However, the routes of period doubling and crisis to chaos were identified under the bifurcation parameter of sun-planet backlash; besides, several different types of routes to chaos were observed and coexisted under the bifurcation parameter of planet-ring backlash including period doubling, Hopf bifurcation, 3T-periodic channel and crisis. Additionally, planet-ring backlash generated a strong coupling effect to system’s non-linear behavior while the sun gear’s bearing clearance produced weak coupling effect. Finally, quasi-periodic motion could be found under all above–mentioned bifurcation parameters and closely associated with the 3T-periodic motion.
Key words: planetary gear train; bifurcation; chaos; transverse-torsional coupling; backlash; bearing clearance
1 Introduction
Owing to compact space, high power density and low noise and vibration, planetary gear train plays a very important role in power transmission system and already has been applied widely in automotive, aerospace, marine and helicopter, etc. However, the related investigation of dynamic characteristics of planetary gear sets is still in progress. After the several decades of practical application and theoretical research, it is gradually to realize that the conventional linear model can not be used to explain some failures or damages especially when geared rotor-bearing system is at the working condition of high speed and low torque. Non-linearity is induced subsequently primarily due to the gear backlash, bearing clearances, sinusoidal transmission error and time-varying meshing stiffness. In addition, backlash in the gear pair and bearing clearances in the shaft-bearing system may be either designed to provide better lubrication and eliminate interferences or due to manufacturing errors and wear. Moreover, backlash or bearing clearances induced transverse and torsional vibration may cause tooth separation and impacts which could deteriorate the reliability and durability of the geared system.
Over the past several decades, a large number of non-linear dynamic researches on gear transmission system have been done. The pioneer work on gear rotor-bearing system with multiple clearances was done by Kahraman and Singh [1], and a three-degree-of- freedom (3 DOF) model was developed which included non-linearities associated with radial clearances in the radial rolling element bearings and backlash between a spur gear pair. Parametric studies were presented and period doubling and quasi-periodic routes to chaos have been identified. Almost at the same period, Kahraman and Singh [2] studied the frequency response characteristics of non-linear geared system with time-varying mesh stiffness. A single-degree-of-freedom (SDOF) spur gear model and backlash and sinusoidal mesh stiffness, and a three-DOF model with clearance non-linearities associated with gear backlash and bearing clearances and time-varying mesh stiffness was established, and a strong interaction between time- varying stiffness and gear backlash was found; while the coupling effect between the time-varying mesh stiffness and bearing clearance was verified to be weak. Later on, many new models with different variables and new methods for clearance non-linear single gear pair were proposed along the work done by Kahraman and Singh [1-2]. However, it should be noted that, although the dynamic research of planetary gear train started from the year of 1980 when Hidaka [3] presented the analysis of the dynamic loads of planetary gear system, and some other researches [4-8] related to dynamics of planetary gear train were published subsequently, the backlash non-linearity research was not extended to planetary gear train system until 2002 when Sun et al [9] regarded the modelling of planetary gear train with multiple-clearances, and in 2003, Sun and hu [10] continued the work and analyzed the non-linear behaviors based on the model established previously. Subsequently, Sun et al [11] proposed a new model considering the backlash and time-varying mesh stiffness, and analyzed the sub-harmonic and chaos response by using the method of Gill numerical integration algorithm with adaptive step size. Changjian and Chen [12-15] presented a series of flexible rotors supported by various bearings, and the results provided useful references for engineers in determining the suitable operating parameters to prevent an undesirable motion and to reduce the vibration and noise in rotor bearing system. Ambarisha and Parker [16] used two models including lumped-parameter model and finite element model to examine the complex nonlinear dynamic behavior of spur planetary gears, and found that the dynamics of planetary gears showed a rich spectrum of nonlinear phenomena, nonlinear jumps, chaotic motions, and period doubling bifurcations occurs when the mesh frequency or any of its higher harmonics is near a natural frequency of the system. Al-shyyab and Kahraman [17] proposed a discrete non-linear torsional vibration model of a single-stage planetary and the non-linear equations of motion are solved semi-analytically using multi-term harmonic balance method in conjunction with inverse discrete Fourier transform and Newton–Rapson method. In 2009, Al-shyyab and Alwidyan [18] analyzed the non-linear dynamic behavior of compound planetary gear train by using a hybrid harmonic balance method in conjugate with inverse Fourier transform. Li et al [19] established a non-linear purely torsional vibration model of a planetary gear train considering transmission errors, time-varying mesh stiffness and backlash, and analyzed the dynamic behaviors according to the bifurcation diagram and Poincare map. The results revealed that system’s motion state will be changed into chaos by the way of crisis as speed increases and period doubling bifurcation as backlashes increases, respectively. Wu et al [20] developed a purely rotational model of Ravigneaux compound planetary gear train sets including time-varying mesh stiffness, synthetic mesh errors and gear backlashes. The differential equations which were converted to non-linear algebraic equations by describing function and harmonic balance method were solved iteratively by single rank inverse Broyden method. The latest research on bifurcation and chaos of planetary gear train was done by Li et al [21], who formulated the non-linear time-varying dynamic model for a multistage planetary gear train, and analyzed the influence caused by bifurcation parameters including damping coefficient and excitation frequency and so on.
Although a lot of researches related to planetary gear train have been conducted and many new models were proposed as well, it should be noted that there are very few relevant studies on the bifurcation and chaos for a transverse-torsional coupled 2K-H planetary gear train with gear backlashes and bearing clearances. The main focus of this work is to propose a new model for 2K-H planetary gear set, and gear backlashes and sun gear’s bearing clearances, time-varying meshing stiffness and comprehensive transmission error are taken into account. By analyzing the bifurcation diagrams and Poincare maps, the characteristics of bifurcation and chaos as well as non-linear behavior of motion are investigated systematically and qualitatively several different bifurcation parameters including input rotation rate, sun-planet gear backlash, planet-ring backlash and sun gear’s radial bearing clearance.
2 Dynamic model of planetary gear set
2.1 Model and assumptions
2K-H planetary gear train consists of four components including sun gear, planetary, ring gear, and carrier which are denoted by S, P, R and C, respectively. and its lumped parameter dynamic model is shown in Fig. 1. rc represents the equivalent radius of the carrier. rbs is the base radius of the sun gear. rbr denotes the base radius of the ring gear. ks and bs are the supporting stiffness and bearing clearance of the sun gear, respectively. cs is the supporting damping of the sun gear. espi, bspi and cspi represent the comprehensive transmission error, backlash and damping coefficient along the action line of sun-planet mesh, respectively. Similarly, erpi, brpi and crpi represent the comprehensive transmission error, backlash and damping coefficient along the action line of planet-ring mesh, respectively. ζpi and ηpi denote the local coordinates of the ith planet and could be used to analyze the equivalent error and displacement. The whole transmission system is assumed to be driven by prime mover TD and loaded by external torque TL, which are applied to the sun gear and carrier, respectively.
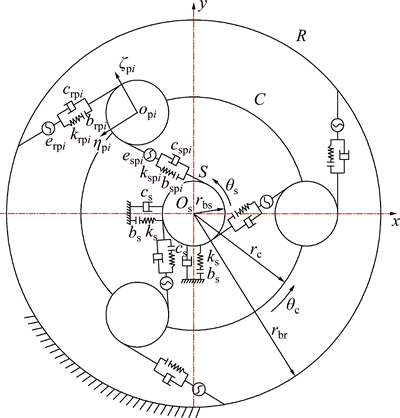
Fig. 1 Lumped parameter dynamic non-linear model of planetary gear train
Additionally, the periodically time-varying meshing stiffnesses kspi and krpi along the action line of sun-planet and planet-ring are subjected to the piece-wise linear backlash functions which will be explained further in the following sections, and both of them could be modelled as rectangular waveforms and described in the form of a Fourier series of fundamental meshing frequency, ω [22-23]. In order to simplify the model, only the fundamental harmonic is considered and described as
 (i=1, 2, …, N) (1)
(i=1, 2, …, N) (1)
where km,spi, km,rpi, ka,spi and ka,rpi represent the mean and alternating components of the sun-planet and planet- ring’s time-varying meshing stiffness, respectively.
To establish the mathematical model of the system more effectively and concisely, several assumptions are introduced as follows:
1) Spur gear is employed and each gear body is assumed to be rigid.
2) Ring gear is considered to be fixed and without flexibility, and sun gear is supported by flexible shaft. Besides, the pure rotational degrees are applied for planets and carrier in view of their large supporting stiffness in practical application. It could be concluded that the system has 4+N general coordinates, i.e.

where i=1, 2, …, N, and N stands for the number of planets.
3) The system is considered to be free of friction, tooth modification, profile shifting, and time-dependent temperature.
4) The planets are equally spaced and the backlashes of each sun-planet or planet-ring meshes are supposed to be identical. Furthermore, the gear errors and initial phase angles are treated as a deterministic input.
2.2 Comprehensive transmission errors and sun gear’s equivalent transverse displacements along action line of sun-planets and planet-ring meshes
2.2.1 Comprehensive transmission errors
The comprehensive transmission errors [19, 21] which belong to the scope of internal displacement excitations include so-called static transmission error and equivalent geometric eccentricity errors of the sun gear, planets and ring gears [22, 24-25]. Both two kinds of error excitations are periodic and could be described by sinusoidal functions.
It is worth pointing out that static transmission error is defined as the difference between the actual angular position of the driven gear and where it would be if the gears were perfect, and could be represented as
 (i=1, 2, …, N) (2)
(i=1, 2, …, N) (2)
where Aspi and Arpi are the amplitudes of the static transmission errors along the action line of the ith sun- planet and planet-ring meshes, respectively; ω is the corresponding meshing frequency and equals ωszszr/(zs+zr) (here ωs is the input rotation frequency of the sun gear, zs and zr are the tooth number of the sun and planet, respectively); βspi and βrpi are the relevant initial phase angles of the ith sun-planet and planet-ring meshes, respectively.
Figure 2 shows the geometric relations of the gear’s eccentricity errors and their equivalents on the line of action. Figure 2(a) shows the sun gear and planet’s equivalent eccentricity errors along sun-planet action line and could be obtained as

(i=1, 2, …, N) (3)
where  and
and  are the sun gear and planet’s equivalent eccentricity errors on sun-planet action line, respectively; Es and Epi are the amplitudes of the sun gear and the ith planet’s eccentricity errors; ωsH is the relative frequency of sun gear’s eccentricity error and equals (ωs-ωH); ωH is the rotation frequency of the carrier;
are the sun gear and planet’s equivalent eccentricity errors on sun-planet action line, respectively; Es and Epi are the amplitudes of the sun gear and the ith planet’s eccentricity errors; ωsH is the relative frequency of sun gear’s eccentricity error and equals (ωs-ωH); ωH is the rotation frequency of the carrier;  is the relative frequency of planet’s eccentricity error and equals (ωs-ωH)zp/zs; zp is the tooth number of planet; βs and βpi are the initial phase angles of the sun and the ith planet’s eccentricity errors; and α is the pressure angle of the related gear pair.
is the relative frequency of planet’s eccentricity error and equals (ωs-ωH)zp/zs; zp is the tooth number of planet; βs and βpi are the initial phase angles of the sun and the ith planet’s eccentricity errors; and α is the pressure angle of the related gear pair.
By the same method, and known from Fig. 2(b), the planet and ring gear’s equivalent eccentricity errors along planet-ring gear action line can be represented as

(i=1, 2, …, N) (4)
where  and
and  are the planet and ring gear’s equivalent eccentricity errors on planet-ring action line; Er is the value of the ring gear’s eccentricity error; ωrH is the relative frequency of ring gear’s eccentricity error, and equals ωsHzr/zs; βr is the initial phase angle of the ring gear’s eccentricity error.
are the planet and ring gear’s equivalent eccentricity errors on planet-ring action line; Er is the value of the ring gear’s eccentricity error; ωrH is the relative frequency of ring gear’s eccentricity error, and equals ωsHzr/zs; βr is the initial phase angle of the ring gear’s eccentricity error.
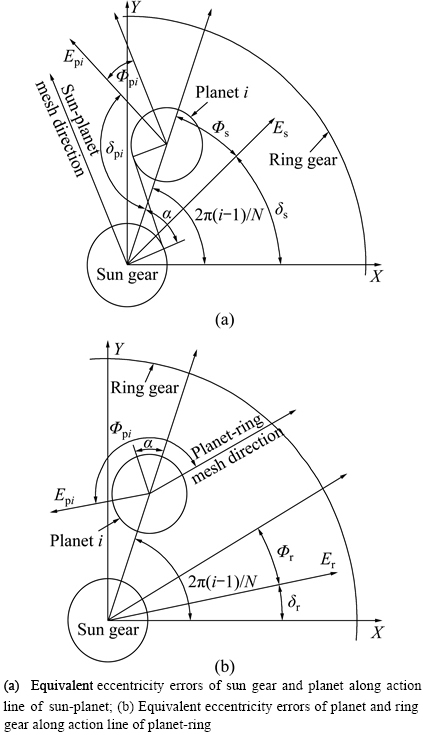
Fig. 2 Equivalent eccentricity errors of sun gear, planet and ring gear along relevant line of action:
In terms of the analysis above, the comprehensive transmission errors along the related action line could be obtained as
(i=1, 2, …, N) (5)
2.2.2 Equivalent transverse displacements along action line of sun gear
As the existence of the sun gear’s transverse displacement may largely affect the meshing force, the analyses of equivalent displacement projected along the line of action become significantly important. their geometric relations are given in Fig. 3. The projections of the sun gear’s transverse displacements on the corresponding action line can be represented as
 (i=1, 2, …, N) (6)
(i=1, 2, …, N) (6)
where  and
and  are the equivalent displacements caused by sun gear’s transverse motion on the ith sun-planet action line; xs and ys are the sun gear’s transverse displacements along the x- and y-direction, respectively.
are the equivalent displacements caused by sun gear’s transverse motion on the ith sun-planet action line; xs and ys are the sun gear’s transverse displacements along the x- and y-direction, respectively.
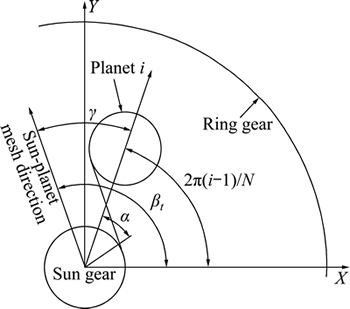
Fig. 3 Sun gear’s equivalent transverse displacements along sun-planet action line
2.3 Piecewise linear displacement functions about backlash and bearing clearances
Piecewise linear displacements function is a non- analytical function essentially describing the mesh elastic force and makes the system motion become strongly non-linear. Besides, the direction of sun gear’s revolution caused by the driving torque is assumed to be positive, and then the displacement functions about backlash and bearing clearance could be described as
 (7a)
(7a)
(7b)
 (7c)
(7c)
 (7d)
(7d)
where
where fspi and frqi are the backlash displacement functions on the action line of the ith sun-planet and planet-ring meshes, respectively; fsx and fsy are the sun gear’s radial clearances displacement functions along x- and y- directions, respectively; Xspi and Xrpi are the relative displacements along the action line of the ith sun-planet and planet-ring meshes which will be explained further in the section 2.5;  is the equivalent displacement on the sun-planet and planet-ring action line and generated by the angular displacement of the carrier; 2bspi and 2brpi represent the backlashes of the ith sun-planet and planet- ring meshes, respectively; 2bs is the radial clearance of the sun gear.
is the equivalent displacement on the sun-planet and planet-ring action line and generated by the angular displacement of the carrier; 2bspi and 2brpi represent the backlashes of the ith sun-planet and planet- ring meshes, respectively; 2bs is the radial clearance of the sun gear.
2.4 Dynamic meshing forces and sun gear’s reaction forces
Dynamic meshing force is normal to the involute profile of the gear tooth and depends on the relative displacement which is already defined in the above-mentioned formula. In addition, it is comprised of elastic restoring force and viscous damping force which represent the energy input and dissipation, respectively. The elastic restoring force is defined as

(i=1, 2, …, N) (8)
where  and
and  are the elastic restoring forces of the ith sun-planet and planet-ring meshes, respectively;
are the elastic restoring forces of the ith sun-planet and planet-ring meshes, respectively;  and
and  are the elastic reaction forces of the sun gear along x- and y-directions, respectively; ks is the supporting stiffness of the sun gear’s rotating shaft.
are the elastic reaction forces of the sun gear along x- and y-directions, respectively; ks is the supporting stiffness of the sun gear’s rotating shaft.
Likewise, the viscous damping force could be represented as
(i=1, 2, …, N) (9)
where  and
and  are the damping forces of the ith sun-planet and planet-ring meshes;
are the damping forces of the ith sun-planet and planet-ring meshes;  and
and  are the damping forces of the sun gear along x- and y- direction, respectively; cspi and crpi are the constant viscous damping coefficients of the ith sun-planet and planet-ring meshes, respectively; cs is the supporting damping coefficient of the sun gear. It should be pointed out that cspi and crpi are the functions of damping ratio ξ and could be described as follows:
are the damping forces of the sun gear along x- and y- direction, respectively; cspi and crpi are the constant viscous damping coefficients of the ith sun-planet and planet-ring meshes, respectively; cs is the supporting damping coefficient of the sun gear. It should be pointed out that cspi and crpi are the functions of damping ratio ξ and could be described as follows:
 (i=1, 2, …, N) (10)
(i=1, 2, …, N) (10)
where ξsp and ξrp are the constant damping ratios of the sun-planet and planet-ring meshes which are confined theoretically and experimentally in the range of 0.03≤ξ≤0.17 [26-27] by NASA researchers; ms, mpi and mr are the masses of the sun, the ith planet and ring gear, respectively.
2.5 Governing differential equation of motion
2.5.1 Transverse-torsional coupled governing equation of motion
According to the analysis above, the non-linear dynamic governing differential equation of motion can be established by using Lagrange principle as follows:
(i=1, 2, …, N) (11)
where Js and Jpi are the mass moments of inertia of sun gear and ith planet; ms is the mass of the sun gear; is the equivalent mass moment of inertia of the carrier.
is the equivalent mass moment of inertia of the carrier.
2.5.2 Governing equation of motion under relative coordinates
Apparently, the dynamic model derived above is a semi-definite system with the existence of the backlash and bearing clearance, which makes the equations can not be solved by numerical integration. In order to eliminate the rigid body displacement and ensure that the equation could become solvable, a set of new coordinates are introduced as
(i=1, 2, …, N) (12)
where Xspi and Xrpi are the relative displacements and so-called dynamic transmission errors of the ith sun-planet and planet-ring meshes, respectively.
It should be pointed out that the new introduced coordinates are obtained by bicontinuous mapping essentially, which means that all of them have the same bifurcation characteristics. Furthermore, coordinates transformation not only makes the system definite but also contains intuitive physical meaning, especially for the research area of the gear vibro-impact problems.
Under the effects of the coordinate transformation and equation recombination, Eq. (11) could be rewritten under new introduced coordinates as
(i=1, 2, …, N) (13)
where
2.5.3 Non-dimensionalized governing equation of motion
With the purpose of comparing and analyzing the results under the same dimensional scale, eq. (13) could be non-dimensionalized by introducing dimensionless time variable τ and letting τ =ωnt, here
 (14)
(14)
Characteristic length bc is introduced as well, and the dimensionless displacement, velocity, acceleration and backlash could be expressed respectively as
 (15)
(15)
Correspondingly, dimensionless piecewise linear displacement function about backlash and bearing clearance could be written as
(16)
Additionally, the time-varying mesh stiffness and comprehensive errors under dimensionless time τ could be described as
(i=1, 2, …, N) (17)
where Ω, ΩsH, ΩpH and ΩrH are the relevant dimensionless excitation frequencies and equal
 (i=1, 2, …, N) (18)
(i=1, 2, …, N) (18)
Substituting Eqs. (14)-(18) into Eq. (13) yields the following dimensionless governing equation of motion.
(i=1, 2, …, N) (19)
Apparently, Eq. (19) could be represented in a matrix-vector form which is beneficial while applying 4th-5th order, variable step-size Rung-Kutta numerical integration method. The matrix-vector form of the Eq. (19) can be written as
 (20)
(20)
where X is the generalized coordinate vector; [M] is the inertia matrix; [C] is damping matrix; [K] is stiffness matrix; F is excitation vector. It could be obviously observed, although not listed in detail, that the equations of motion are strongly non-linear and all coordinates are coupled to each other.
3 Parametric study on characteristics of bifurcation and chaos
With the aim to analyze the non-linear behaviors and characteristics of bifurcation and chaos systematically and qualitatively under different bifurcation parameters including input rotation rate, sun-planet backlash, planet-ring backlash and bearing clearance in a more realistic way, a set of basic parameters are extracted from a real geared system, as listed in table 1. Additionally, the supporting stiffness of the sun gear is designed to be 4.2×104 N/mm. Moreover, it should be noted that the fluctuations of input torque and external load are neglected as they are determined by the characteristics of the prime mover and external load, and hard to eliminate or measure. On the other hand, since the new introduced coordinates  and
and  have the similar non-linear behavior, the dynamic response of the first group sun-planet mesh is selected to analyze the bifurcation and chaos characteristics, namely, the solution of
have the similar non-linear behavior, the dynamic response of the first group sun-planet mesh is selected to analyze the bifurcation and chaos characteristics, namely, the solution of  and
and  will be used for non-linear behavior investigation. Furthermore, in order to avoid the risk of obtaining transient solutions and minimize computing, given the initial conditions of
will be used for non-linear behavior investigation. Furthermore, in order to avoid the risk of obtaining transient solutions and minimize computing, given the initial conditions of 




 and
and  are all set to be zero, the first 100 solutions are discarded after multiple tests. More importantly, it should be noted that the variable of phase angle, which belongs to another research field of phase modulating, will not be paid more attention and will not be taken as a bifurcation parameter as well in this study.
are all set to be zero, the first 100 solutions are discarded after multiple tests. More importantly, it should be noted that the variable of phase angle, which belongs to another research field of phase modulating, will not be paid more attention and will not be taken as a bifurcation parameter as well in this study.
3.1 Bifurcation and chaos analysis caused by dimensionless meshing frequency Ω
Dimensionless meshing frequency, which is closely related to the input rotation rate, and damping ratio play very important roles in the non-linear behavior of planetary gear train. As shown in Fig. 4, the overall bifurcation diagrams of Ω versus under different damping ratios are plotted to illustrate above point.
A lightly damped system ξ=0.03 is considered the first example case, with the increase of the meshing frequency Ω. as can be seen from Fig. 4(a), the system would undergo different types of motion states including 1T-periodic, quasi-periodic, 3T-periodic and chaotic motion which will be explained further in Fig. 5. Furthermore, it could be seen clearly that 1T-periodic motion is in a dominant position within the range of 0≤Ω≤1.35. In other words, the motion is primarily in a stable state when system is operated at the condition of low speed and heavy load. However, over the meshing frequency range of 1.36≤Ω≤2.45, system motion is switched among quasi-periodic, 3T-periodic, 2T-periodic and 1T-periodic. With the Ω keeps increasing, system motion will transfer into chaos which represents tooth separation, then single-sided or double-sided impact exists and the motion becomes uncontrollable and unpredictable as well as the increasing noise. More importantly, it could worsen the reliability and durability of the transmission system. Apparently, this kind of motion state should be avoided or passed quickly in the real application. As Ω increases to 3.03, system motion reduces chaos to a 2T-period attractor, and reverts to 1T-period motion subsequently.
It should be noted that, as the damping ratio increased from 0.03 to 0.09, in other words, system varied from lightly damped to heavily damped, multiple periodic and chaotic motion would be suppressed significantly, as shown in Fig. 4, which indicates that high damping could improve the dynamic response and working conditions but at the expense of more energy dissipation from the viewpoint of practical application.
In order to trace the full processes and the evolution of motion with the increasing of dimensionless meshing frequency, Poincare maps of versus at given ξ=0.03 are obtained to illustrate the diverse non-linear bifurcation characteristics, as shown in Fig. 5. Firstly, it could be observed from Figs. 5(a)-(d), system motion is changed from 1T-periodic to quasi-periodic under the effects of unstable attractor. When Ω increased to the range of 1.35 to 1.69, motion is switched frequently between 3T-periodic and quasi-periodic state which reveals that those two types of motions are closely connected and affected mutually. this will be verified further in the following sections. However, when Ω reaches 1.696, stable attractor starts to draw the system motion from quasi-periodic to 1T-periodic, as shown in Figs. 5(l) to (n). Later, the system motion undergoes 2T-periodic (i.e. sub-harmonic response) and Hopf bifurcation at Ω=1.875 and Ω=1.926, respectively, and then converge to 1T-periodic when Ω reaches 2.02, shown in Figs. 5(o)-(r). Figures 5(r) to (u) indicate that under the effects of strange attractor, the system enters into, exits and enters into chaos again by the route of crisis over the range of 2.02≤Ω≤2.62. Subsequently, after a certain width of chaotic motion window within the range of 2.45≤Ω≤3.03, system motion bifurcates to 2T-periodic through transient quasi-periodic, and finally reverts to 1T-periodic at Ω=3.58, as shown in Figs. 5(v)-(x).
Table 1 Parameters of planetary gear set

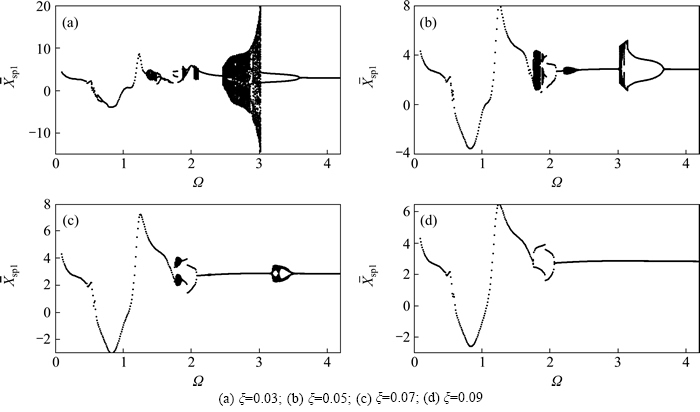
Fig. 4 Bifurcation diagrams of Ω versus  at given
at given  =3,
=3,  =3.5,
=3.5,  =2, and different ξ values:
=2, and different ξ values:
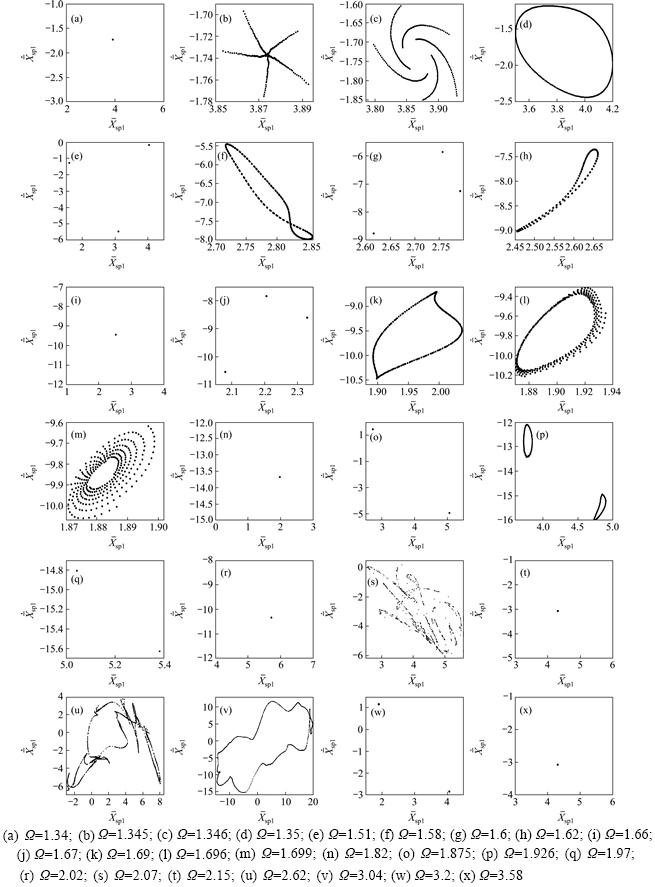
Fig. 5 Poincare maps of versus  at given ξ=0.03, =3, =3.5, =2 and different Ω values:
at given ξ=0.03, =3, =3.5, =2 and different Ω values:
By comparing Fig. 4(a) and Fig. 5, the system’s non-linear behaviors and bifurcation characteristics could be investigated, and above all, bifurcation points and the motion state are obtained, which could be utilized for predicting the motion state and critical transition frequency under different system parameters including working speed and damping ratio, and avoiding the unwanted motion state by adjusting the structure and physical parameters. This is quite valuable especially for improving the stability and extending durability of the planetary gear train system.
3.2 Bifurcation and chaos analysis caused by dimensionless sun-planet backlash 
The characteristics of bifurcation and chaos caused by dimensionless sun-planet backlash  which could be changed with the different working temperatures, increasing wear and the deformation of components as the result of the working time grows, are examined as well. Figure 6 shows the bifurcation diagrams of
which could be changed with the different working temperatures, increasing wear and the deformation of components as the result of the working time grows, are examined as well. Figure 6 shows the bifurcation diagrams of  versus under different damping ratios and given dimensionless meshing frequency Ω=1.5. It could be observed that, by comparing Fig. 6(a) and Fig. 5(a), system motion becomes much more complex and chaotic motion occupies the dominant position and the magnitude of vibration grows gradually as the dimensionless sun-planet backlash increases, which differs from that of system motion under the bifurcation parameter Ω. In most region of bifurcation diagram, system is in a state of non-periodic motion including quasi-periodic, 2T-periodic, 3T-periodic and chaotic. In addition, from the point of engineering application, the increasing magnitude of the vibration could increase stress level at tooth root and contact point, and produce uncontrollable vibration as well as intensive noise. Besides, the more attention should be paid to the comparison of the values of backlash
versus under different damping ratios and given dimensionless meshing frequency Ω=1.5. It could be observed that, by comparing Fig. 6(a) and Fig. 5(a), system motion becomes much more complex and chaotic motion occupies the dominant position and the magnitude of vibration grows gradually as the dimensionless sun-planet backlash increases, which differs from that of system motion under the bifurcation parameter Ω. In most region of bifurcation diagram, system is in a state of non-periodic motion including quasi-periodic, 2T-periodic, 3T-periodic and chaotic. In addition, from the point of engineering application, the increasing magnitude of the vibration could increase stress level at tooth root and contact point, and produce uncontrollable vibration as well as intensive noise. Besides, the more attention should be paid to the comparison of the values of backlash  and relative displacement
and relative displacement  and it could be found that tooth separation, single-sided and double-sided impact occur in the most area of chaotic and multiple periodic motion state, which represents that gear tooth suffers from considerable dynamic load and makes gear rattle problems take place. this kind of working condition should be forbidden in practice normally.
and it could be found that tooth separation, single-sided and double-sided impact occur in the most area of chaotic and multiple periodic motion state, which represents that gear tooth suffers from considerable dynamic load and makes gear rattle problems take place. this kind of working condition should be forbidden in practice normally.
Furthermore, with an increase of damping ratio ξ from 0.05 to 0.09 at the 0.02 intervals, period doubling bifurcation become easier to identify and the non-periodic motion state is suppressed notably, as shown from Figs. 6(b) to (d), and this kind of effects caused by damping ratio is similar to that analyzed in section 3.1.
Based on the analysis above, it can be concluded that the increasing backlash could deteriorate the stability and the life of the gear transmission distinctly, and the appropriate backlash in conjunction with damping ratio under design load and working speed are crucial for the system’s motion state.
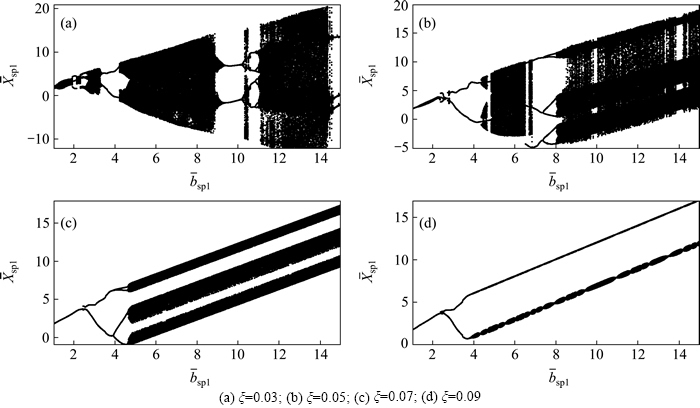
Fig. 6 Bifurcation diagrams of versus  at given Ω=1.5, =3.5, =2 and different ξ values:
at given Ω=1.5, =3.5, =2 and different ξ values:
Similarly, the Poincare maps of versus within the range of dimensionless sun-planet backlash 1≤≤6 at the given meshing frequency Ω=1.5 and damping ratio ξ=0.05 are plotted in Fig. 7 to illustrate the full path of evolution and non-linear behavior. Apparently, Figs. 7(a) to (e) show the shapes of attractor that make the system go through the motion of 1T-periodic to quasi-periodic. It could be concluded that system follows the same route from 1T-periodic to quasi-periodic if comparing with Figs. 5(a)-(d). After winding and twisting, the quasi-periodic motion bifurcates to 3T-periodic, and then converges to 1T-periodic under the effects of stable attractor, as shown from Figs. 7(e) to (j). Subsequently, as can be seen from Figs. 7(j) to (l), system bifurcates from 1T-periodic motion to 2T-periodic and then Hopf bifurcation appears when reaches 2.81. Moreover, within the range of 2.85≤≤4.83, system experiences a series of period doubling and inverse period doubling bifurcation motion state including 2T-periodic, 4T-periodic, 8T-periodic and 16T-periodic, as shown in Figs. 7(m) to (s). Finally, system enters into chaotic motion by the route of crisis which is also the route to chaos under bifurcation parameters of Ω, as shown in Figs. 5(r)-(u) and Figs. 7(s)-(t).
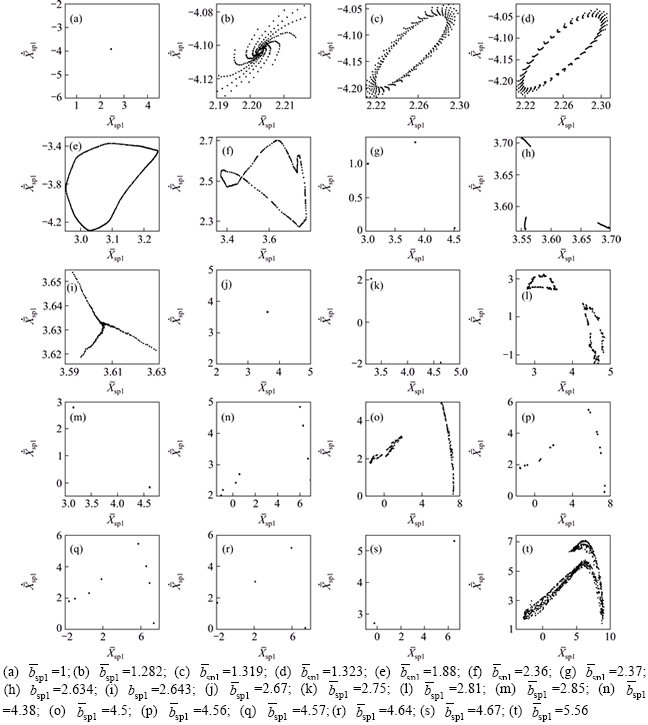
Fig. 7 Poincare maps of versus at given Ω=1.5, ξ=0.05,  =3.5,
=3.5,  =2, and different
=2, and different  values:
values:
As known from Fig. 8, the bifurcation diagrams of versus are obtained at the given damping ratio ξ=0.11 and different dimensionless meshing frequencies Ω. Additionally, it should be pointed out that dimensionless meshing frequency which corresponds to input rotation speed also plays an important role in the system’s non-linear behavior under the bifurcation diagram of versus as shown in Fig. 8. To demonstrate the above point, bifurcation diagrams are obtained under different meshing frequencies and the given damping ratio ξ=0.11. According to Fig. 8(a), it could be seen evidently that system motion enters into chaos by the route of period doubling at low dimensionless meshing frequency Ω=1 and within the range of 5.5≤ . Subsequently, system comes across a narrow 16T-periodic window over the range 8.4≤≤8.48, and then enters into chaotic motion once again. Furthermore, the chaotic motion bifurcates to 8T-periodic and 2T-periodic when reaches 8.8 and 9.37, respectively.
. Subsequently, system comes across a narrow 16T-periodic window over the range 8.4≤≤8.48, and then enters into chaotic motion once again. Furthermore, the chaotic motion bifurcates to 8T-periodic and 2T-periodic when reaches 8.8 and 9.37, respectively.
However, as the dimensionless meshing frequency Ω increases to 1.5 or 2, which means that the system input rotation rate is increased to a certain degree and the torque is reduced correspondingly, the chaotic motion disappears as shown in Figs. 8(b) and (c). At the same time, only 1T-periodic and 2T-periodic motions are observed in the whole bifurcation diagram. Furthermore, when Ω reaches 2.5, the motion becomes stable and in the state of 1T-periodic motion and the magnitude of relative displacement grows monotonously with the sun-planet backlash.
The above analysis result seems contradictory with previously studies and viewpoint that chaotic and multiple periodic motions normally exist in the high speed and low torque working condition. However, it should be found that, not only for this example case, the high damping ratio has suppressed the intensity of vibration significantly and make the system motion towards the state of stable and 1T-periodic although the increase of meshing frequency. In other words, the growing damping produces more important effects on non-linear behavior than increasing input rotation rate.
3.3 Bifurcation and chaos analysis caused by dimensionless planet-ring backlash 
Planet-ring backlash  could generate strong coupling effects on the non-linear behavior and bifurcation characteristics of sun-planet meshes. To illustrate this point, the bifurcation diagrams of
could generate strong coupling effects on the non-linear behavior and bifurcation characteristics of sun-planet meshes. To illustrate this point, the bifurcation diagrams of  versus under different damping ratios ξ are obtained in Fig. 9 at the given dimensionless meshing frequency Ω=1.5, sun-planet backlash =3 and bearing clearance
versus under different damping ratios ξ are obtained in Fig. 9 at the given dimensionless meshing frequency Ω=1.5, sun-planet backlash =3 and bearing clearance  =2. As can be seen from Fig. 9(a), system presents a variety of motion states with the increase of
=2. As can be seen from Fig. 9(a), system presents a variety of motion states with the increase of  and several narrow 3T-periodic and 4T-periodic motion windows could be seen in the range of 11.3≤≤11.6 and 15.1≤≤15.3, respectively. It should be noted that in this case chaotic motion becomes dominant when is larger than 8, which leads to the conclusion that the increasing backlash of the sun-planet or planet-ring, with reference to the analysis in section 3.2, could aggravate the system vibration response considerably and make the system toward the state of multiple periodic or chaotic motion finally.
and several narrow 3T-periodic and 4T-periodic motion windows could be seen in the range of 11.3≤≤11.6 and 15.1≤≤15.3, respectively. It should be noted that in this case chaotic motion becomes dominant when is larger than 8, which leads to the conclusion that the increasing backlash of the sun-planet or planet-ring, with reference to the analysis in section 3.2, could aggravate the system vibration response considerably and make the system toward the state of multiple periodic or chaotic motion finally.
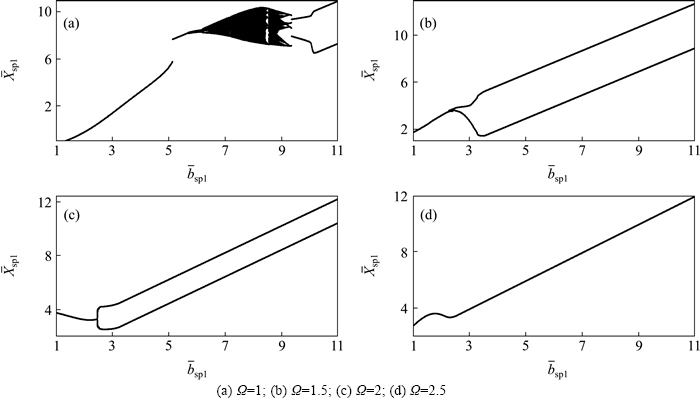
Fig. 8 Bifurcation diagrams of  versus at given ξ=0.11,
versus at given ξ=0.11,  =3.5, =2, and different Ω values:
=3.5, =2, and different Ω values:
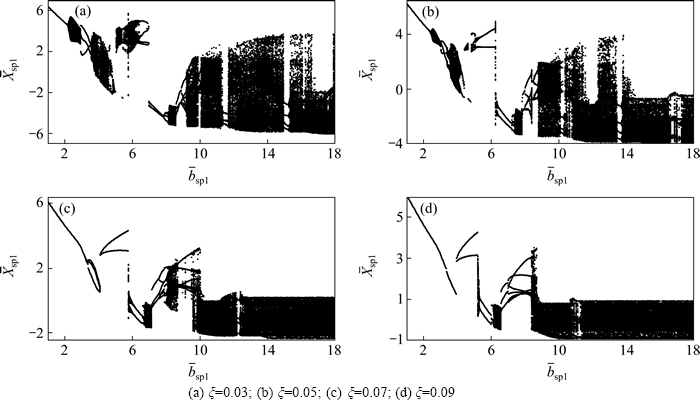
Fig. 9 Bifurcation diagrams of versus at given Ω=1.5, =3, =2 and different ξ values:
Likewise, with the increase of damping ratio from 0.03 to 0.09, as shown from Figs. 9(a) to (d), the trend of the bifurcation characteristics is obtained and it could be seen clearly that the area of chaotic and multiple periodic motion is reduced gradually and verifies the inhibiting effects of damping already mentioned in sections 3.1 and 3.2.
By investigating the Poincare maps of versus at the given dimensionless meshing frequency Ω=1.5 and given damping ratio ξ=0.05 and different planet-ring backlashs over the range 1≤≤9, the better understanding of evolution and characteristics of bifurcation is achieved, as shown in Fig. 10.
Figures 10(a)-(d) show that the system starts with 1T-periodic motion when below 1.9, then changes into quasi-periodic under the effect of the unstable attractor, and finally bifurcates to 3T-periodic motion. After a certain width of 3T-periodic motion window, system enters into chaotic motion by the route of 3T-periodic channel, as shown in Figs. 10(e)-(f), and it needs to be noted that the shape of fractal structure has changed drastically as the increased from 3.7 to 4.41. Chaotic motion reduces to 6T-periodic at =4.79, and bifurcates to 3T-periodic at =4.84, then changes into quasi-periodic motion again when =4.91 as shown in Figs. 10(g)-(h), respectively. As increased from 3.7 to 5.39, it could be observed that the motion enters into the chaos again by the route of crisis and the fractal structure changed greatly by comparing the Figs. 10(k)-(l). System motion reduces from chaos to 8T-periodic at =5.47 and 4T-periodic at =5.55, after that it changes into chaos by the route of period doubling (see Figs. 10(m)-(o)). However, when locates in the range of 5.93 to 6, as shown in Figs. 10(o)-(r), the motion is switched between chaos and Hopf bifurcation frequently. Finally, as can be seen from Figs. 10(u) to 10(x), system enters into the chaos by the route of periodic doubling again.
In the light of above analysis, it could be concluded that, under different planet-ring backlashs, system exhibits rich and complex non-linear bifurcation characteristics, and several different kinds of routes to chaos are observed including crisis, period doubling, 3T-periodic channel and Hopf bifurcation.
Similar to the analysis in sections 3.1 and 3.2, the bifurcation diagrams of versus  at the given damping ratio ξ=0.11 and different meshing frequency Ω are obtained as well. Judged from Fig. 11(a), although heavily damped, system motion is in the state of frequent switch between the chaotic and multiple periodic motion when lies in the range of 5.2 to 11 at the given dimensionless meshing frequency Ω=1, and in the state of 1T-periodic motion over the range 1≤≤5.2. Due to the effect of heavy damping, as shown in Fig. 11(b), the chaotic motion is suppressed obviously and the magnitude of vibration is reduced in a large extent when Ω increased to 1.5. Furthermore, as the Ω reaches 2, only 1T-periodic and 2T-periodic motion and one bifurcation point could be observed in the whole bifurcation diagram. Lastly, non-periodic motion is vanished thoroughly throughout the whole bifurcation diagram when Ω equals 2.5, and the magnitude of the vibration almost remain unchanged over the range 3.4≤≤11.
at the given damping ratio ξ=0.11 and different meshing frequency Ω are obtained as well. Judged from Fig. 11(a), although heavily damped, system motion is in the state of frequent switch between the chaotic and multiple periodic motion when lies in the range of 5.2 to 11 at the given dimensionless meshing frequency Ω=1, and in the state of 1T-periodic motion over the range 1≤≤5.2. Due to the effect of heavy damping, as shown in Fig. 11(b), the chaotic motion is suppressed obviously and the magnitude of vibration is reduced in a large extent when Ω increased to 1.5. Furthermore, as the Ω reaches 2, only 1T-periodic and 2T-periodic motion and one bifurcation point could be observed in the whole bifurcation diagram. Lastly, non-periodic motion is vanished thoroughly throughout the whole bifurcation diagram when Ω equals 2.5, and the magnitude of the vibration almost remain unchanged over the range 3.4≤≤11.
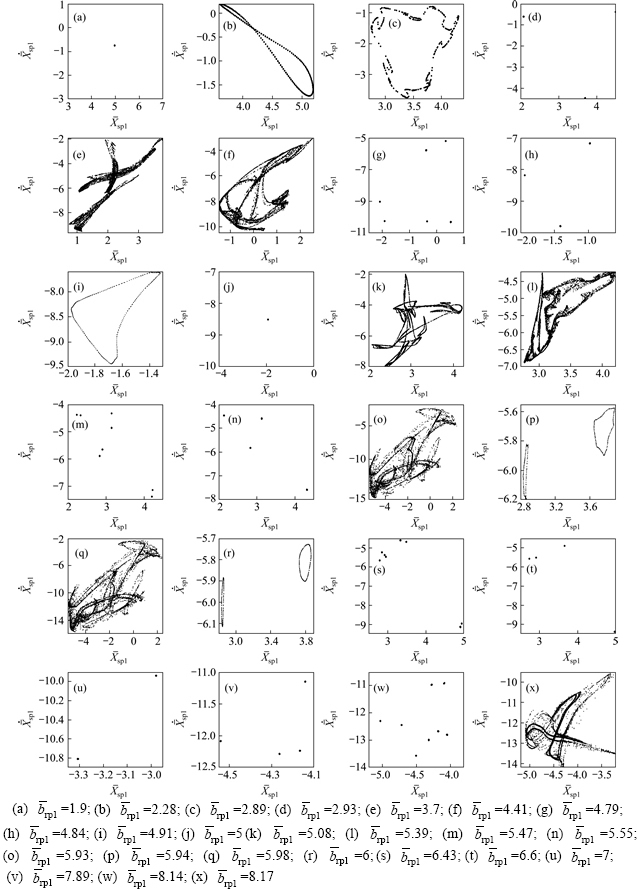
Fig. 10 Poincare maps of versus  at given ξ=0.05, Ω=1.5, =3, =2 and different values:
at given ξ=0.05, Ω=1.5, =3, =2 and different values:
By comparing Fig. 8 and Fig. 11, it could be inferred that, under large meshing damping, the increasing meshing frequency could lead the system motion from non-periodic to periodic regardless of the increasing input rotation rate and decreasing input torque.
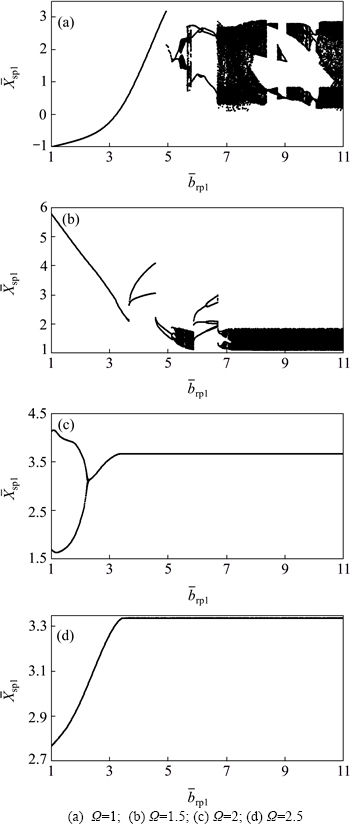
Fig. 11 Bifurcation diagrams of versus at given ξ=0.11, =3, =2 and different Ω values:
3.4 Bifurcation and chaos analysis caused by dimensionless sun gear dimensionless bearing clearance
The coupling effects on the characteristics of bifurcation and chaos caused by bearing clearance of the sun gear are investigated as well and verified to be weak. As shown in Fig. 12, non-periodic motion can not be observed and the relative displacement along the sun-planet action line is affected negligibly over the range 1≤≤10. With the purpose of validating the universal phenomenon of pure periodic motion under the bifurcation parameter of sun gear’s bearing clearance, a number of cases under the different parameter combinations are calculated and corresponding bifurcation diagrams are obtained which also confirms the above observation and reveals that sun gear’s bearing clearance only could produce weak and ignorable coupling effects on the non-linear behavior of system motion.
On the other hand, as known to all, although this is not the main concern of this work, the floating sun gear which could be understood as infinite bearing clearance could improve the load sharing performance significantly. Most importantly, this floating sun gear will not change the system motion state and contribute greatly during the real engineering design.
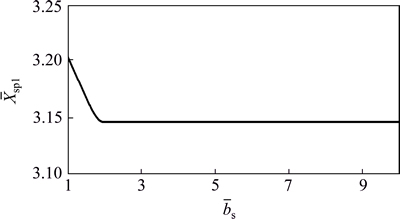
Fig. 12 Bifurcation diagram of versus at given ξ=0.05, =3,  =3.5 and Ω=1.5
=3.5 and Ω=1.5
4 Conclusions
1) a new transverse-torsional coupled model of 2K-H planetary gear train with backlash and bearing clearance is proposed and the backlash non-linear differential governing equation of motion is derived as well. Based on the governing equation, the bifurcation and chaos characteristics are obtained by applying variable step-size Runge-Kutta numerical integration method under different bifurcation parameters including input rotation rate, sun-planet backlash, planet-ring backlash and sun gear radial bearing clearance.
2) The proposed new model for transverse-torsional coupled 2K-H planetary gear train and time-varying mesh stiffness, transverse displacements and radial clearance of sun gear, comprehensive transmission error, sun-planet and planet-ring gear backlash are taken into consideration. This model extends the related study and enriches the current literatures on non-linear behavior of planetary gear train, especially on the aspect of bifurcation and chaos motion.
3) The increasing damping could suppress the non-periodic motion effectively and improve system’s stability and reduce the intensity of vibration.
4) The route of crisis to chaos is observed under the bifurcation parameter of dimensionless meshing frequency.
5) The route of crisis and period doubling to chaos is identified under the bifurcation parameter of sun- planet backlash.
6) Several kinds of routes to chaos are observed and coexisted under the bifurcation parameter of planet-ring backlash including period doubling, crisis, Hopf bifurcation and 3T-periodic channel, and this backlash plays an important role and leads strong coupling effects to system’s non-linear behaviors.
7) The sun gear’s bearing clearance produces weak coupling effects on the system’s non-linear behavior and no bifurcation and chaotic motion could be observed under this bifurcation parameter.
8) Quasi-periodic motion would be found in all above-mentioned bifurcation parameters and closely related to 3T-periodic motion.
References
[1] Kahraman A, Singh R. Nonlinear dynamics of a geared rotor bearing system with multiple clearance [J]. Journal of Sound and Vibrations, 1991, 144: 469-506.
[2] Kahraman A, Singh R. Interactions between time-varying mesh stiffness and clearance nonlinearities [J]. Journal of Sound and Vibrations, 1991, 146: 135-156.
[3] Hidaka T. Analysis of dynamic load on planetary gear [J]. Bulletin of the JSME, 1980, 23(176): 315-322.
[4] August R, Velex P. Torsional vibration and dynamic loads in a basic planetary gear system [J]. Journal of Vibration, Acoustics, Stress, and Reliability in Design, 1986, 108(7): 348-353.
[5] Kahraman A. Planetary gear train dynamics [J]. ASME, Journal of Mechanical Design, 1994, 116(3): 713-720.
[6] Saada A, Velex P. An extended model for the analysis of the dynamic behavior of planetary trains [J]. ASME, Journal of Mechanical Design, 1995, 117(6): 241-247.
[7] Lin J, Parker R G. Analytical characterization of the unique properties of planetary gear free vibration [J]. ASME, Journal of Vibration and Acoustics, 1999, 121(7): 316-321.
[8] Parker R G, Agashe V, Vijayakar S M. Dynamic response of a planetary gear system using a finite element/contact mechanics model [J]. ASME, Journal of Mechanical Design, 2000, 122(9): 304-310.
[9] Sun Tao, Shen Yun-wen, Sun Zhi-ming. Study on nonlinear dynamic behavior of planetary gear train dynamic model and governing equations [J]. Journal of Mechanical Engineering, 2002, 38(3): 6-10. (in chinese)
[10] Sun Tao, Hu Hai-yan. Nonlinear dynamics of a planetary gear system with multiple clearances [J]. Mechanism and Machine Theory, 2003, 38(5): 1371-1390.
[11] Sun Zhi-min, Ji Lin-hong, Shen Yun-wen. Nonliear dynamics of 2K-H planetary gear train [J]. Journal of Tsinghua University: Sci & Tech, 2003, 43(5): 636-639. (in chinese)
[12] Changjian C W, Chen C K. Bifurcation and chaos of a flexible rotor supported by turbulent journal bearings with non-linear suspension [C]// Proc Mech Eng, Part J, J Eng Tribol, 2006, 220: 549-561.
[13] Changjian C W, Chen C K. Nonlinear dynamic analysis of a flexible rotor supported by micropolar fluid film journal bearings [J]. Int J Eng Sci, 2006, 44: 1050-1070.
[14] Changjian C W, Chen C K. Bifurcation and chaos of a flexible rotor supported by turbulent journal bearings with non-linear suspension [J]. Mech Mach Theory, 2007, 42(3): 312-333.
[15] Changjian C W, Chen C K. Bifurcation and chaos analysis of a flexible rotor supported by turbulent long journal bearings [J]. Chaos Solitons Fractals, 2007, 34(4): 1160-1179.
[16] Ambarisha V K, Parker R G. Nonlinear dynamics of planetary gears using analytical and finite element models [J]. Journal of Sound and Vibration, 2007, 302(1): 577-595.
[17] Al-shyyab A, Kahraman A. A non-linear dynamic model for planetary gear sets [M]. Proc Inst Mech Eng, Part K, J Multi-Body Dyn, 2007, 221: 567-576.
[18] Al-shyyab A, Alwidyan K. Non-linear dynamic behavior of compound planetary gear trains: model formulation and semi-analytical solution [C]// Proc Inst Mech Eng, Part K, J Multi-Body Dyn, 2009, 223: 199-210
[19] Li Tong-jie, Zhu Ru-peng, Bao He-yun. Nonlinear torsional vibration modeling and bifurcation characteristic study of a planetary gear train [J]. Journal of Mechanical Engineering, 2011, 47(21): 76-83. (in chinese)
[20] Wu Shi-jing, Liu Zhen-hao, Wang Xiao-sun. Nonliear dynamic characteristics of compound planetary gear train sets based on harmonic balance method [J]. Journal of Mechanical Engineering, 2011, 47(1): 55-61. (in chinese)
[21] Li Sheng, Wu Qing-ming, Zhang Zhi-qiang. Bifurcation and chaos analysis of multistage planetary gear train [J]. Nonliear Dyn, 2014, 75: 217-233.
[22] Kahraman A, Singh R. Non-linear dynamics of a spur gear [J]. Journal of Sound and Vibration, 1990, 142(1): 49-75.
[23] Lin J, Parker R G. Planetary gear paramtetric instability caused by mesh variation [J]. Sound Vib, 2002, 249(1): 129-145.
[24] Welbourn D B. Fundamental knowledge of gear noise—a survey [C]// Proceedings of the conference on noise and vibrations of engines and transmissions. Cranfield: Institution of mechanical engineers, 1979: 9-14.
[25] Houser D R. Gear noise state of the art [C]// Proceedings of Inter-noise. 1988, 88: 601-606.
[26] Kasuba R, Evans J W. An extended model for determing dynamic loads in spur gearing [J]. ASME Mech Des, 1981, 103(2): 398-409.
[27] Wang K L, Cheng H S. A numerical solution to the dynamic load [J]. ASME Mech Des, 1981, 103(1): 177-187.
(Edited by YANG Hua)
Foundation item: Projects(51375226, 51305196, 51475226) supported by the National Natural Science Foundation of China; Projects(NZ2013303, NZ2014201) supported by the Fundamental Research Funds for the Central Universities, China
Received date: 2014-11-27; Accepted date: 2015-03-19
Corresponding author: ZHU Ru-peng, Professor, PhD; Tel: +86-25-84892500; E-mail: rpzhu@nuaa.edu.cn

