J. Cent. South Univ. (2016) 23: 636-643
DOI: 10.1007/s11771-016-3109-x

Robust adaptive control for a class of uncertain non-affine nonlinear systems using neural state feedback compensation
ZHAO Shi-tie(��ʯ��), GAO Xian-wen(������)
School of Information Science and Engineering, Northeastern University, Shenyang 110819, China
 Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Abstract: A robust adaptive control is proposed for a class of uncertain nonlinear non-affine SISO systems. In order to approximate the unknown nonlinear function, an affine type neural network (ATNN) and neural state feedback compensation are used, and then to compensate the approximation error and external disturbance, a robust control term is employed. By Lyapunov stability analysis for the closed-loop system, it is proven that tracking errors asymptotically converge to zero. Moreover, an observer is designed to estimate the system states because all the states may not be available for measurements. Furthermore, the adaptation laws of neural networks and the robust controller are given based on the Lyapunov stability theory. Finally, two simulation examples are presented to demonstrate the effectiveness of the proposed control method. Finally, two simulation examples show that the proposed method exhibits strong robustness, fast response and small tracking error, even for the non-affine nonlinear system with external disturbance, which confirms the effectiveness of the proposed approach.
Key words: adaptive control; neural networks; uncertain non-affine systems; state feedback; Lyapunov stability
1 Introduction
In the past decades, the control problem of the uncertain nonlinear systems has been given a lot of attention in the control field. Many powerful methodologies for designing the controller are proposed for uncertain nonlinear systems owing to advances in nonlinear control theory.
Neural network (NN) approaches and fuzzy logic (FL) have been widely used in modelling and controlling of nonlinear systems because of their capabilities of nonlinear function approximation, learning, adaption and generalization. Based on this universal approximation property, many adaptive neural network control schemes have been developed to solve control problem of the uncertain nonlinear systems. The adaptive neural network control (ANNC) schemes were proposed by using NNs for uncertain nonlinear systems [1�C3]. In such schemes, an NN was employed to approximate the uncertain nonlinear functions. There are parameter variations, unavoidable model uncertainties and unknown external disturbances for any practical system. These uncertainties will degrade the controller performance. In these cases, the conventional control approaches are not applicable, and usually the robust control approaches are suggested to address this issue. Therefore, the analytical study of robust adaptive control of uncertain nonlinear systems using NN has received much attention during last decade. The robust adaptive neural network control (RANNC) problem for a class of nonlinear systems with external disturbance was investigated [4�C5].
It is difficult to describe dynamic models by using accurate math models in many nonlinear systems. Fuzzy logic control (FLC) is a rule-based type of control that uses fuzzy set concepts and fuzzy logic. It can deal with complex and ill-defined systems for which the application of conventional control techniques is not straightforward or feasible. The problem of adaptive fuzzy tracking control was presented for the external disturbances of a class of uncertain nonlinear systems [6�C8].
In the last decade, many researchers proposed that the leaning abilities of NNs can be used as a powerful tool in fuzzy system design. The adaptive algorithms based on fuzzy neural networks (FNNs) were developed for the tracking control of the nonlinear system [9�C11]. The proposed algorithm was based on the FNNs controllers. The FNN was used to online control the nonlinear system.
Variable structure control (VSC) which plays an important role in the nonlinear control theory is a type of robust control design. The VSC is insensitive to parameter uncertainties, modelling error and external disturbances. As a result, there is high motivation to variable structure control in the control of these uncertain nonlinear systems [12�C13].
However, the states of the system were assumed to be available in most of the previous works, while this assumption may not be satisfied in practical applications. In these cases, observer-based or output feedback controllers might be used.
Varieties of hybrid control systems have been designed by using different combinations of above methods [14�C16]. However, the above mentioned studies had the condition that the systems or subsystems should be affine. In practice, there are many nonlinear systems with non-affine structure.
Recently, several approaches have been developed for nonlinear non-affine systems [17�C19]. The tracking control problem was studied for a class of uncertain non-affine systems by SHEN and ZHANG [17]. Based on the principle of sliding mode control (SMC), using the neural networks (NNs) and the property of the basis function, a novel adaptive design schemes were proposed. BAHRAM and MOHAMMAD [18] introduced a new decentralized adaptive neural network controller for a class of large-scale nonlinear systems with unknown non-affine subsystems and unknown interconnections represented by nonlinear functions. A radial basis function neural network was used to represent the controller��s structure. A novel fuzzy adaptive controller was investigated for a class of non-affine systems with unknown control direction by BOULKROUNE et al [19]. An equivalent model in affine-like form was first derived for the original non-affine system by using a Taylor series expansion. Then, a fuzzy adaptive control was designed based on the affine-like equivalent model. The stability of the closed loop system was guaranteed through Lyapunov stability analysis.
In this work, a robust adaptive control scheme is proposed for a class of the uncertain nonlinear non-affine SISO systems. The mean value theorem is used to transform unknown non-affine system into a similar affine system. Moreover, an affine type neural network and neural state feedback compensation are employed to approximate the unknown nonlinear function, and observer is used to estimate unmeasured states. The effects of neural network approximation error and external disturbance are compensated using a robust term in the control signal. Furthermore, in the proposed approach, the controller singularity issue is avoided, and this approach can also be applied to affine systems.
2 Problem formulation
Consider a SISO uncertain nonlinear system described by
 (1)
(1)
where
 is the state vector of the system,
is the state vector of the system,  is the system output,
is the system output,  is the control input,
is the control input,  is smooth unknown non-affine function in control input and the state vector, and
is smooth unknown non-affine function in control input and the state vector, and  is a unknown external disturbance. The control goal is to design a controller that the system output y(t) tracks the desired trajectory yd(t).
is a unknown external disturbance. The control goal is to design a controller that the system output y(t) tracks the desired trajectory yd(t).
Assumption 1: The desired trajectory yd(t) and its time derivatives are smooth and bounded.
are smooth and bounded.
Assumption 2: The external disturbance d(X, t) is bounded:
Assumption 3: For all  with a controllability region ��x, the function g(X,u)=
with a controllability region ��x, the function g(X,u)= is nonzero.
is nonzero.
Lemma 1 (Mean value theorem): Suppose that  is continuous at both endpoints y=a and y=b, and has a derivative at each point of an open set Rn��(a, b). Therefore, there is a point
is continuous at both endpoints y=a and y=b, and has a derivative at each point of an open set Rn��(a, b). Therefore, there is a point 
 (2)
(2)
The tracking error vector is defined as
 (3)
(3)
where e1 is the output error:
 (4)
(4)
Using Eqs. (1) and (3), the tracking error system can be written as
 (5)
(5)
Where 
Considering the mean value theorem, the non-affine function f(X, u) can be written as
 (6)
(6)
where u�� is a point between zero and u. Then, Eq. (5) can be rewritten as

If the functions f(X) and g(X, u��) are known and there is no external disturbance d(X, t), and the state X is available, then we can choose
 (7)
(7)
where  should be chosen such that the corresponding characteristic polynomial becomes Hurwitz, and then the closed loop error dynamics is stable. Consequently,
should be chosen such that the corresponding characteristic polynomial becomes Hurwitz, and then the closed loop error dynamics is stable. Consequently, 
However, if f(X) and g(X,u��) are unknown, controller design is difficult. Therefore, in this work, a robust adaptive controller is developed.
3 Controller design and stability analysis
The uncertain nonlinear non-affine SISO system (1) can be formulated as

 (8)
(8)
where
 (9)
(9)
Using Eqs. (9) and (6), ��(X, u) can be rewritten as

 (10)
(10)
where 
 .
.
Using Eqs. (8) and (10), the tracking error system can be written as
 (11)
(11)
or
 (12)
(12)
In order to approximate unknown function ��(X, u), an affine type neural network (ATNN) and neural state feedback compensator are proposed.
The output of the neural compensator can be described as
 (13)
(13)
where is the neural network compensator, and
is the neural network compensator, and  is the neural state feedback compensator.
is the neural state feedback compensator.

 and
and 
 are the adjustable parameter vectors, and l, m are node numbers of neural network.
are the adjustable parameter vectors, and l, m are node numbers of neural network. 
 and
and 
 are basis function vectors.
are basis function vectors.
The commonly used Gaussian function is used as basis function:
 i=1, 2, ��, l (14)
i=1, 2, ��, l (14)
 i=1, 2, ��, m
i=1, 2, ��, m
(15)
where ��fi and ����i are the center vectors of the receptive field; ��fi and ����i are the widths of the Gaussian function, respectively.
It is supposed that X and W belong to compact sets U and ��, respectively, defined as
 (16)
(16)
where M1 and M2 are the designed parameters.
Define the optimal parameter vector W:
 (17)
(17)
and approximation error ��:
 (18)
(18)
where  denotes the estimation of W and
denotes the estimation of W and 
The robust adaptive controller comprises of two controllers and can be defined as
 (19)
(19)
where uf is the feedback controller as
 (20)
(20)
and ur is the adaptive neural network robust controller, which is defined as
 (21)
(21)
where un is the neural compensator to approximate the unknown uncertainties, usm is VSC to eliminate the effects of the neural network approximation errors and the external disturbances, and urc is the robust compensation controller.
Substituting Eq. (19) into Eq. (12) and using Eq. (20), the error dynamic equation can be obtained as
 (22)
(22)
By using Eq. (13), the function ��(X, u) can be represented as

 (23)
(23)
where 
The output of the neural network compensator is given as
 (24)
(24)
and  are updated using the update laws:
are updated using the update laws:
 (25)
(25)
 (26)
(26)
where ��1 and ��2 are positive constants.
The VSC and robust compensation controller can be defined as
 (27)
(27)
 (28)
(28)
where  �� is a small positive constant and P1 is a symmetric positive definite matrix that satisfies the Lyapunov equation:
�� is a small positive constant and P1 is a symmetric positive definite matrix that satisfies the Lyapunov equation:
 (29)
(29)
and Q1 is a positive definite matrix.
Theorem 1: For the system defined by Eq. (1), the robust adaptive controller is considered as Eqs. (19)�C (21), (24), (27), (28) with the adaption laws Eqs. (25), (26). If Assumptions 1�C3 are satisfied, the closed-loop system is stable in the sense of Lyapunov.
Proof: Introducing Eq. (24), the error dynamic equation (22) can be rewritten as


 (30)
(30)
where  and
and 
Consider a Lyapunov function candidate as
 (31)
(31)
where 
Differentiating Eq. (31) yields
 (32)
(32)
Substituting Eq. (30) into Eq. (32) yields




 (33)
(33)
We can write  and
and  Using update laws Eqs. (25) and (26), thus
Using update laws Eqs. (25) and (26), thus


 (34)
(34)
Using Eqs. (34) and (29), Eq. (33) can be rewritten as
 (35)
(35)
Substituting uvs and urc into Eq. (35) yields

 (36)
(36)
Since V>0 and  this shows stability in the sense of Lyapunov. As a result, the stability of the proposed robust adaptive controller can be guaranteed.
this shows stability in the sense of Lyapunov. As a result, the stability of the proposed robust adaptive controller can be guaranteed.
Since the state vector is unmeasurable in practice, the unmeasurable states are estimated. An observer is considered as
 (37)
(37)
where K0 is the observer gain vector to be designed so that the matrix A�CK0CT is Hurwitz, and is the estimation of E. Define the observation error as
is the estimation of E. Define the observation error as  Then, using Eqs. (11) and (37), we can write
Then, using Eqs. (11) and (37), we can write
 (38)
(38)
or
 (39)
(39)
Equation (39) can be rewritten as
 (40)
(40)
Assumption 4: For the given positive-definite matrix Q2, there exists a positive-definite solution P2 for the matrix equations:
 (41)
(41)
The output of the neural network compensator is given as
 (42)
(42)
is updated using the update law:
 (43)
(43)
 (44)
(44)
The VSC and robust compensation controller can be defined as
 (45)
(45)
where  .
.
 (46)
(46)
Theorem 2: For the system defined by Eq. (1), the robust adaptive controller is considered as Eqs. (19)�C (21), (42), (45), (46) with the adaption laws Eqs. (43) and (44). If Assumptions 1�C4 are satisfied, the closed-loop system is stable in the sense of Lyapunov.
Proof: Consider a Lyapunov function candidate as
 (47)
(47)
Differentiating Eq. (47) yields

 (48)
(48)
Substituting Eqs. (37) and (40) into Eq. (48) yields

 (49)
(49)
Then, using Eqs. (29) and (41), Eq. (49) can be rewritten as


 (50)
(50)
Substituting Eqs. (45) and (46) and adaptation laws Eqs. (43), (44) in Eq. (50), we can write


 (51)
(51)
As a result, the closed-loop system is stable, and the stability of the proposed robust adaptive controller can be guaranteed.
Remark 1: In the variable structure control, high frequency oscillation (termed as ��chattering��) exists in the control input. To solve this problem, a modification of VSC with a saturation function has been proposed to reduce the control chattering:
 (52)
(52)
Remark 2: The proposed approach can be applied to affine systems and avoid the controller singularity issue.
4 Simulation results
Two case studies are given to demonstrate the effectiveness of the proposed control method. The first simulation is nonlinear non-affine system and the second is affine system.
4.1 Example 1
Consider the following non-affine SISO nonlinear system [17]:
 (53)
(53)
where 
 and
and  =x2.
=x2.
The desired trajectory is  According to the design procedures in Section 3, the design parameters are selected as ks=1, ��f=0.2, ��g=0.3 and ��=0.001.
According to the design procedures in Section 3, the design parameters are selected as ks=1, ��f=0.2, ��g=0.3 and ��=0.001.
The feedback and observer gain matrices are given by


Besides, the positive-definite matrices Q1 and Q2 are chosen as


The simulations are carried out with initial conditions  and
and 
The simulation results are shown in Figs. 1 and 2.
Figure 1 shows the tracking responses of system outputs and reference signals, control inputs and tracking errors with Theorem 1. Figure 2 shows the tracking responses of system outputs, control input and tracking errors with Theorem 2.
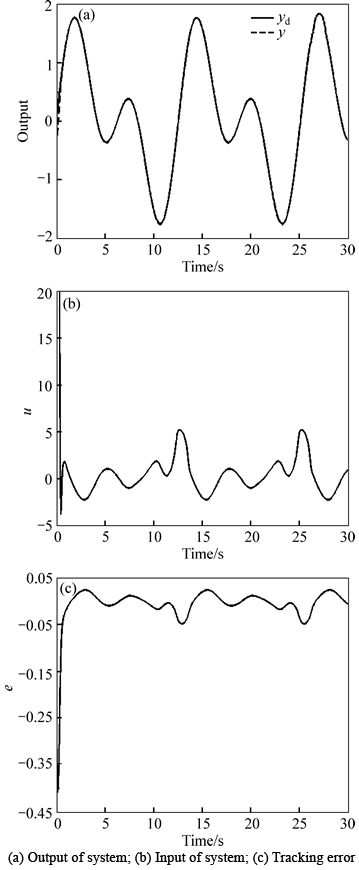
Fig. 1 Simulation results with Theorem 1 in Example 1:

Fig. 2 Simulation results with Theorem 2 in Example 1:
From Figs. 1 and 2, it is shown that the proposed scheme is a good method to improve the tracking error and the control performance of the uncertain nonlinear non-affine systems.
4.2 Example 2
Consider a inverted pendulum system. The dynamic equations of such system are given by [6, 16]
 (54)
(54)
where x1=�� and  are the angular position and velocity of the pole, respectively. g=9.8 m/s2 denotes the acceleration due to gravity. M=1 kg and m=0.1 kg are the masses of cart and the mass of pole, respectively. L= 0.5 m is the half length of pole and d is the external disturbance. The desired trajectory is
are the angular position and velocity of the pole, respectively. g=9.8 m/s2 denotes the acceleration due to gravity. M=1 kg and m=0.1 kg are the masses of cart and the mass of pole, respectively. L= 0.5 m is the half length of pole and d is the external disturbance. The desired trajectory is  The disturbance is
The disturbance is  The controller parameters are chosen as ks=2, ��=0.001, ��f=0.1 and ��g=0.2. The feedback and observer gain matrices, and matrices Q1 and Q2 are chosen as the same as the first example. The initial conditions are chosen as zeros. The simulation results of the inverted pendulum system are shown in Figs. 3 and 4.
The controller parameters are chosen as ks=2, ��=0.001, ��f=0.1 and ��g=0.2. The feedback and observer gain matrices, and matrices Q1 and Q2 are chosen as the same as the first example. The initial conditions are chosen as zeros. The simulation results of the inverted pendulum system are shown in Figs. 3 and 4.

Fig. 3 Simulation results with Theorem 1 in Example 2:

Fig. 4 Simulation results with Theorem 2 in Example 2:
Figures 3 and 4 show that the desired performance is successfully achieved by the designed robust adaptive controller.
5 Conclusions
The robust adaptive control is proposed for a class of the uncertain non-affine nonlinear SISO systems. The neural state feedback compensator is employed to approximate the unknown nonlinear function. The adaptive laws of the neural networks and robust controller are derived based on the stability of the closed loop error dynamics. The mean value theorem is used to transform non-affine nonlinear system into affine nonlinear system, and the state observer is employed to estimate unmeasured states. Furthermore, the singularity problem of the proposed approach is avoided, and this approach can also be applied to affine systems. Finally, two simulation examples are applied to nonlinear systems. Simulation results confirm the effectiveness of the proposed control method for non-affine systems and affine systems.
References
[1] LEE C Y, LEE J J. Adaptive control for uncertain nonlinear systems based on multiple neural networks [J]. IEEE Transaction on Systems, Man, and Cybernetics�CPart B: Cybernetics, 2004, 34(1): 325�C333.
[2] GE S S, WANG C. Direct adaptive NN control for a class of nonlinear systems [J]. IEEE Transaction on Neural Networks, 2002, 13(1): 214�C221.
[3] CHEN P, QIN H, SUN M, FANG X. Global adaptive neural network control for a class of uncertain non-linear systems [J]. IET Control Theory and Applications, 2011, 5(5): 655�C662.
[4] YU L, FEI S M, LI X. Robust adaptive neural tracking control for a class of switched affine nonlinear systems [J]. Neurocomputing, 2010, 73: 2274�C2279.
[5] YUAN R Y, TAN X M, YI J Q. Robust adaptive neural network control for a class of uncertain nonlinear systems with actuator amplitude and rate saturations [J]. Neurocomputing, 2014, 125: 72�C80.
[6] LI Y M, TONG S C, LI T S. Adaptive fuzzy output feedback control of uncertain nonlinear systems with unknown backlash-like hysteresis [J]. Information Sciences, 2012, 198: 130�C146.
[7] YANG Y S, REN J S. Adaptive fuzzy robust tracking controller design via small gain approach and its application [J]. IEEE Transactions on Fuzzy Systems, 2003, 11(6): 783�C795.
[8] LI T S, TONG S C, FENG G. A novel robust adaptive-fuzzy-tracking control for a class of nonlinear multi-input/multi-output systems [J]. IEEE Transactions on Fuzzy Systems, 2010, 18(1): 150�C160.
[9] CHEMACHEMA M. Output feedback direct adaptive neural network control for uncertain SISO nonlinear systems using a fuzzy estimator of the control error [J]. Neural Networks, 2012, 36: 25�C34.
[10] CHIEN Y H, WANG W Y, LEU Y G, LEE T T. Robust adaptive controller design for class of uncertain nonlinear systems using online T-S fuzzy-neural modeling approach [J]. IEEE Transaction on Systems, Man, and Cybernetics�CPart B: Cybernetics, 2011, 41(2): 542�C552.
[11] YANG G, MENG J E. Online adaptive fuzzy neural identification and control of a class of MIMO nonlinear systems [J]. IEEE Transactions on Fuzzy Systems, 2003, 11(4): 462�C477.
[12] HAN H C. Output feedback stabilization of uncertain fuzzy systems using variable structure system approach [J]. Fuzzy Sets and Systems, 2009, 160: 2812�C2823.
[13] BOULKROUNE A, M��SAAD M. A fuzzy adaptive variable- structure control scheme for uncertain chaotic MIMO systems with sector nonlinearities and dead-zones [J]. Expert Systems with Applications, 2011, 38: 14744�C14750.
[14] WU T S, KARKOUB M, CHEN H S, YU W S, HER M G. Robust tracking observer-based adaptive fuzzy control design for uncertain nonlinear MIMO systems with time delayed states [J]. Information Sciences, 2015, 290: 86�C105.
[15] ALOUI S, PAGES O, HAJJAJI A E, CHAARI A, KOUBAA Y. Improved fuzzy sliding mode control for a class of MIMO nonlinear uncertain and perturbed systems [J]. Applied Soft Computing, 2011, 11: 820�C826.
[16] MARYAM S K, Farid S, MARYAM Z. Design of adaptive fuzzy wavelet neural sliding mode controller for uncertain nonlinear systems [J]. ISA Transactions, 2013, 52: 342�C350.
[17] SHEN Q K, ZHANG T P. Novel design of adaptive neural network controller for a class of non-affine nonlinear systems [J]. Commun Nonlinear Sci Number Simulat, 2012, 17: 1107�C1116.
[18] BAHRAM K, MOHAMMAD B M. Non-affine nonlinear adaptive control of decentralized large-scale systems using neural networks [J]. Information Sciences, 2010, 180: 3335�C3347.
[19] BOULKROUNE A, MSAAD M, FARZA M. Adaptive fuzzy tracking control for a class of MIMO nonaffine uncertain systems [J]. Neurocomputing, 2012, 93: 48�C55.
(Edited by YANG Bing)
Foundation item: Project(61433004) suppouted by the National Natural Science Foundation of China
Received date: 2014-12-02; Accepted date: 2015-06-25
Corresponding author: GAO Xian-wen, Professor, PhD; Tel: +86-24-83684946; E-mail: gaoxianwen@mail.neu.edu.cn

